音叉振动电容式表面电位测量装置设计
2022-05-09于海军赫伟东孙迎萍张海燕
于海军,王 鹢,赫伟东,孙迎萍,张海燕
(1. 兰州空间技术物理研究所 空间环境材料行为及评价技术重点实验室,兰州 730000;2. 中国电子科技集团公司第四十九研究所,哈尔滨 150028)
0 引言
航天器在轨运行期间,其表面介质材料与空间等离子体相互作用,会在航天器表面产生净电荷积累。当表面电位升高到一定量值后,将以静电放电形式或通过卫星结构、接地系统注入到卫星电子系统中,对星上电子系统造成影响,甚至威胁卫星安全。因此,在卫星设计中,有必要进行表面电位的检测和控制。
20 世纪七八十年代,NASA 和ESA 的多颗卫星都搭载了表面电位检测载荷,采用的是振动电容式电位测量装置,其振动机构为音叉式驱动机构。国内的卫星表面电位检测多采用电容分压式电位测量装置,少部分为振动电容式的,振动机构为动圈或压电堆栈式驱动机构;研究中采用的传统理论计算方式仅适用于简单理想模型,对于复杂的工程应用有局限性。
鉴于以上情况,本文开展适合工程应用的音叉式振动机构研制,提出基于电荷感应与静电场仿真的电位测量装置设计方法,并对样机进行标定实验以验证设计的正确性。
1 振动电容式表面电位检测仪工作原理
振动电容式表面电位检测仪的工作原理如图1所示:采用周期性振动的电极(感应电极)对被测介质的电位进行感应,由于电极与被测介质之间的电容随着振动发生周期性变化,电极上会输出周期变化的电流信号;以振动频率为参考信号对该电流信号进行峰值提取再放大、检波后,即可得到与被测介质表面电位成正比的电压信号,从而实现介质表面电位的检测。
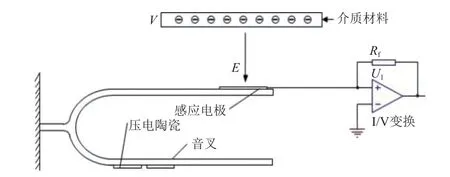
图1 振动电容式表面电位检测仪工作原理示意Fig. 1 Principle of vibration capacitance surface potential detector
图1 中介质材料为卫星表面热控材料,受空间等离子体环境影响表面产生电荷积累,电荷所形成的电场能够作用于周期性振动的感应电极。感应电极上产生的电流信号可表示为
2 音叉振动系统设计
音叉振动系统作为感应电极的驱动组件,也是电容式表面电位检测仪传感器的核心组件,用来控制音叉带动感应电极振动,并使其振幅及振动频率稳定。由式(2)可知,只有当音叉振动幅值稳定时,感应电极输出的电流才能稳定,电流与被测电位呈线性关系。
2.1 音叉结构设计
根据表面电位检测仪工作原理,音叉结构设计要求包括以下3 点:
1)感应电流灵敏度与感应电极振动频率成正比,因此要求音叉工作频率尽量高;
2)音叉振幅决定感应电极的上、下极限位置,而极限位置高度差与电场强度差成正比,因此要求振幅尽量大;
3)在音叉振动过程中,感应电极整体移动,不存在绕感应电极中心转动的运动形式,因此只能选择1 阶或2 阶振型。
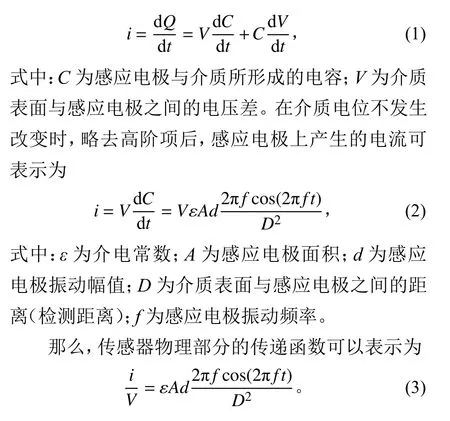
图2 所示为音叉结构,2 块压电陶瓷片(PZT)分别粘贴在叉体上,一片将电能转换为机械能驱动音叉振动,另一片将音叉振动产生的机械能转换成电信号反馈输出给音叉振动控制系统,音叉根部导线作为公共端(接地)。感应电极粘贴在音叉臂上,并与音叉基体绝缘。在激励音叉振动时,当输入信号的频率和音叉的固有频率相等时,音叉即产生谐振,获得最大振幅。
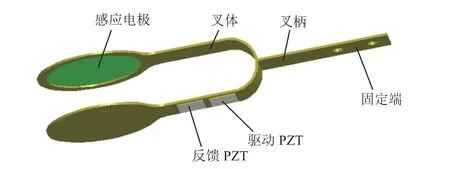
图2 音叉结构Fig. 2 Structure diagram of tuning fork
综合以上设计要求和构型,建立音叉的仿真模型,得到其1~6 阶振型如图3 所示。结合不同材料音叉的振动仿真结果(见表1),将振幅与振动频率乘积最大作为选择依据,确定选用不锈钢材料的2 阶振型音叉。
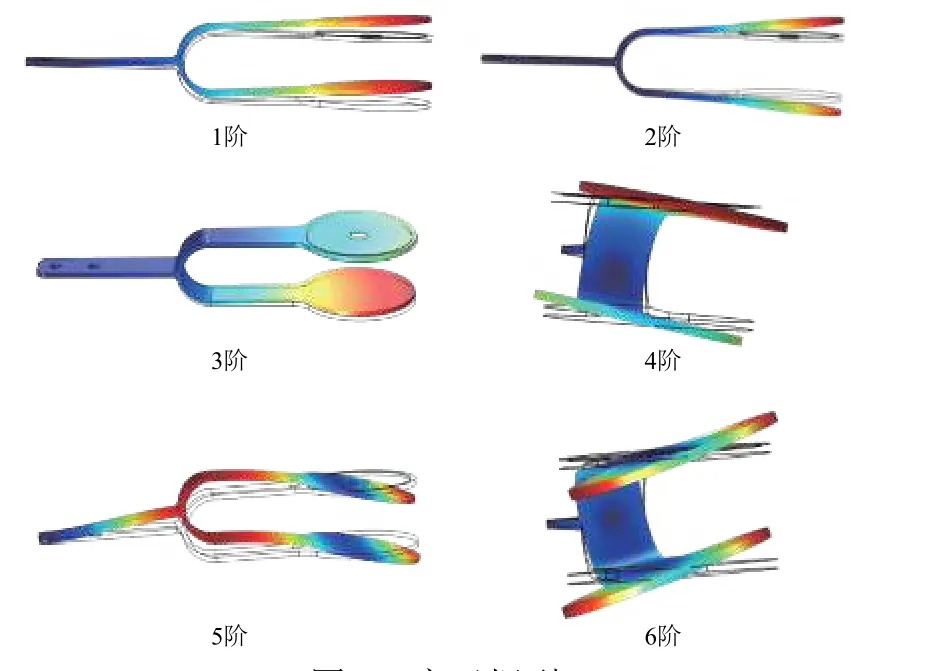
图3 音叉振型Fig. 3 Mode of vibration of the tuning fork

表1 音叉性能仿真结果Table 1 Simulation results of the performance of the tuning fork
2.2 控制系统设计
音叉驱动控制系统是一个闭环自动控制系统,如图4 所示,反馈压电陶瓷片拾取音叉振动的信号作为反馈信号输入控制系统,输入信号为交变正弦信号
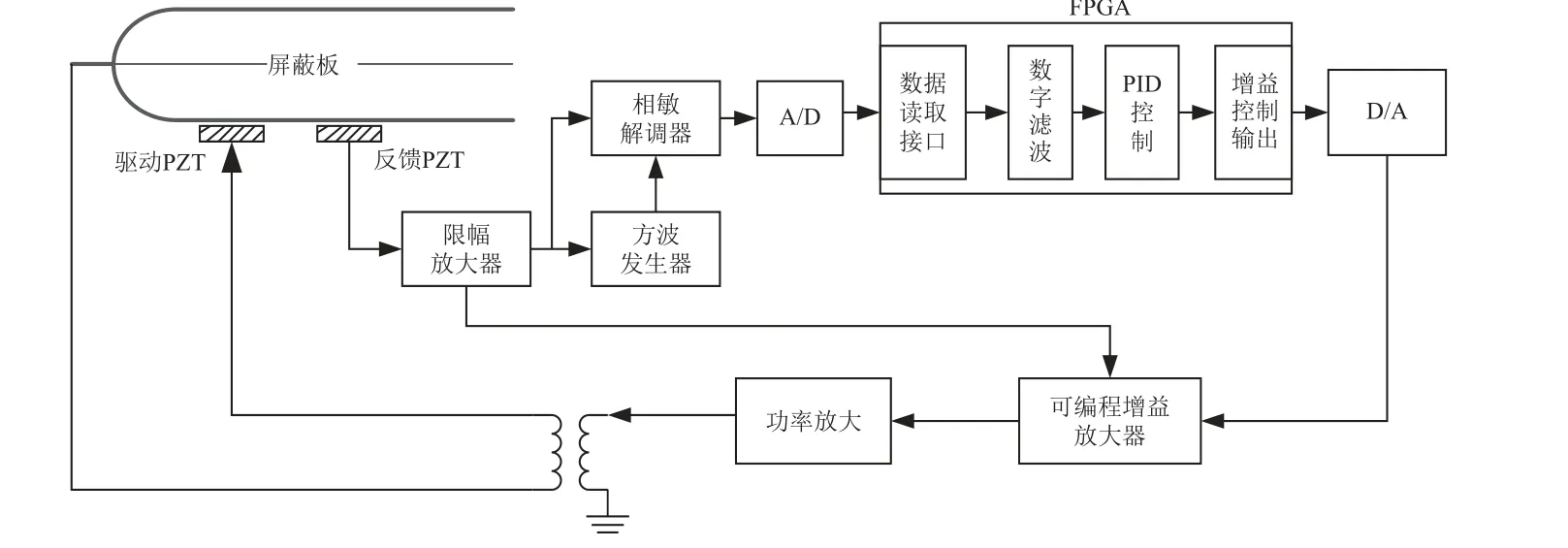
图4 音叉稳幅振动控制系统原理Fig. 4 Principle of vibration control system for stabilizing the amplitude of the tuning fork

式中:为振幅;为音叉谐振角速率;Δ为漂移频率。信号经过限幅放大电路后,二极管桥路组成的方波发生电路产生一个类方波信号作为后级解调器的输入;相敏解调器将检出输入正弦信号峰值通过A/D 转换后输入到FPGA;FPGA 首先采用数字滤波器对输入信号进行滤波,通过PID 控制将振动反馈电压幅值控制在稳定值水平,然后经过D/A 转换后输入到可编程增益放大器,控制增益的大小,最后通过功率放大器和变压器将电压调整到稳定驱动电压,进而驱动音叉稳幅振动。
3 传感器灵敏度及精度分析
3.1 灵敏度分析
由式(3)可以看出,表面电位检测仪的传感器灵敏度与检测距离的平方成反比,与感应电极面积、振幅、振动频率成正比;和由音叉特性决定,不再讨论。图5 为传感器灵敏度与感应电极半径和检测距离的关系,可以看出,在为定值条件下,对传感器灵敏度的影响较大。
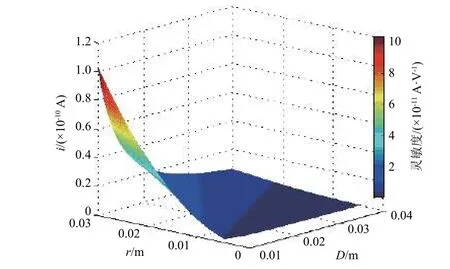
图5 传感器灵敏度影响因素分析Fig. 5 Analysis of factors affecting the sensor sensitivity
将感应电极半径设为 10 mm,检测距离设为 28 mm,并根据第 2.1 节的音叉设计结果,设定音叉振幅为 124 μm,振动频率为 528 Hz,则当被测电位分辨率要求为 1 V 时,需要对感应电流幅值的测量精度达到 1.45 pA,传感器物理部分的灵敏度为/=1.45×10A/V。
提高传感器灵敏度的措施包括:增大感应电极振幅和振动频率;根据传感器尺寸,在可制造范围内增大感应电极面积;根据测量范围,在保证安全间距条件下减小检测距离。
3.2 精度分析
物理部分和前端检测电路都会影响传感器的检测精度。
物理部分中,检测距离、感应电极面积为几何尺寸,在传感器装配完成后即认为确定不变,其误差通过后期标定可以补偿;音叉振幅、振动频率为动态变化量,其中可通过电路检测在线读取,而无法在线获取,因此需尽量控制振幅的温漂、时漂来提升传感器检测精度。
前端检测电路精度主要取决于电路噪声,降低噪声、提高信噪比可以提升传感器检测精度。
4 静电场仿真分析
本文根据传感器的工作原理及结构特点,采用COMSOL 软件建立其仿真模型,因传感器为轴对称结构,将仿真模型简化为取对称轴1/2 的二维平面模型,如图6 所示,感应电极、音叉、壳体及输入电极材料为铝合金;被测介质材料为聚酰亚胺(模拟卫星表面热控包覆层),与输入电极直接贴覆;音叉、壳体接地电位,被测介质接被测电位。
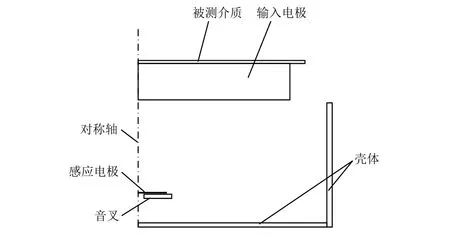
图6 传感器仿真模型Fig. 6 Simulation model of the sensor
根据电荷感应原理,感应电极上产生的感应电荷为

式中:为感应电极处的电场强度;为感应电极的面积;为介电常数。将感应电极振动时的上、下2 个极限位置作为研究对象,对感应电极在振幅上、下限分别设定2 次仿真计算,并求得感应电极面积上的电场强度积分,得到这2 个位置感应电极上的感应电荷分别为和,则感应电流可由=和=计算得到:

根据传感器设计结果设定音叉振幅为124 μm,振动频率为528 Hz,检测距离为28 mm,感应电极半径为10 mm,被测介质电位为-2000 V 条件下的静电场仿真结果如图7 所示,其中横坐标为传感器径向,纵坐标为传感器轴向。根据仿真派生值得到感应电流峰值为2.68×10A(得出传感器物理部分的灵敏度为1.34×10A/V),与本文理论计算得到的传感器物理部分的灵敏度1.45×10A/V基本吻合。可见仿真结果与理论计算结果一致性较好,说明本文提出的基于电荷感应与静电场仿真方法设计电位测量装置可行。
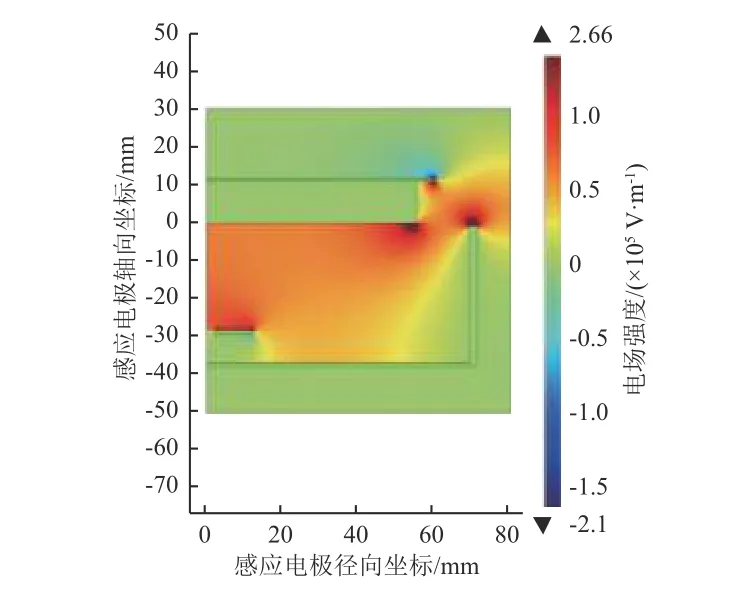
图7 静电场仿真结果Fig. 7 Cloud diagram of the electrostatic field
图8 为向电场强度在对称轴上的变化情况,感应电极在-轴上的位置为28 mm,此处曲线斜率较大,电场强度随变化较快,即电场强度的变化率较大,在同等音叉振动条件下,传感器灵敏度较高。
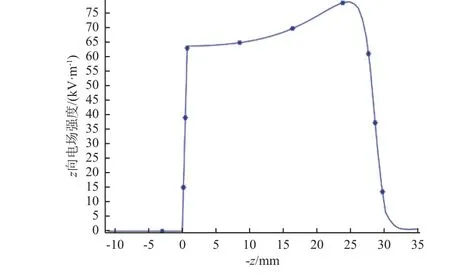
图8 z 向电场强度在对称轴上的变化情况Fig. 8 Variation of z-direction electric field intensity on the axis of symmetry
图9 为音叉振动的上、下两极限位置处,感应电极上向电场强度的径向分布情况,上、下极限位置产生感应电荷的差随时间的变化即为感应电流。
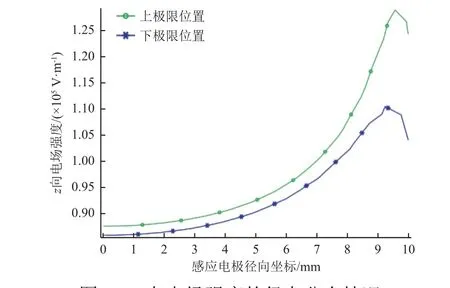
图9 z 向电场强度的径向分布情况Fig. 9 Radial distributions of z-direction electric field intensity
图8 和图9 分别给出了传感器轴向和感应电极径向的电场强度分布情况,可见,感应电极的轴向位置和径向尺寸对传感器灵敏度有较大影响。
5 标定实验验证
根据音叉设计结果,研制了表面电位检测仪实验样机并进行桌面标定测试。标定原理为将传感器输入电极与高压直流电源连接,采用高压直流电源作为标准电位对传感器进行0~3000 V 范围标定。
音叉起振后,将感应电极产生的感应电流与前端检测电路连接,经I/V 变换后得到的峰值电压作为传感器输出电压。标定结果如图10 所示,其中横坐标为标准电位,纵坐标为传感器输出电压,检测电路的等效电阻为1 GΩ。结合标定曲线,得出传感器物理部分的灵敏度为5.73×10A/V,且传感器线性度较好。考虑到传感器样机加工和装配误差,可以认为实验结果与理论计算、仿真结果基本相符。且传感器的制造误差随着样机组装完成即被确定,可通过标定实验修正,不会影响电位检测结果。
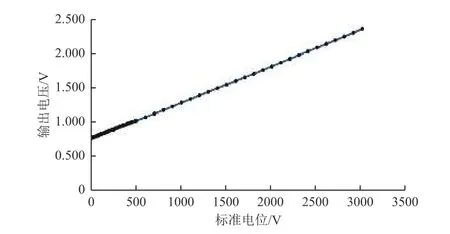
图10 样机标定结果Fig. 10 Calibration result for the prototype
6 结束语
本文对振动电容式卫星表面电位检测仪的核心部件——振动音叉进行详细设计,确定了音叉结构参数及驱动方式;通过分析表面电位检测仪传递函数,得出了传感器灵敏度及精度影响因素;提出了基于电荷感应与静电场仿真的电位测量装置设计方法,得到的传感器灵敏度与理论计算结果量级内一致,最终样机标定实验结果与传感器设计要求相符。
音叉式振动电容表面电位检测装置解决了电容分压检测中存在的漏电流问题,提高了检测精度;但其在轨长时间工作时可能发生音叉振幅漂移问题,有待后续从音叉材料工艺或传感器设计方面继续开展研究。
[1]程炳钧, 王斌, 周斌, 等. 非接触式表面电位探针设计与研制概述[J]. 航天器环境工程, 2013, 30(1): 87-90 CHENG B J, WANG B, ZHOU B, et al. Design and implementation of non-contact surface potential probe[J].Spacecraft Environment Engineering, 2013, 30(1): 87-90
[2]代银松, 张希军, 罗健峰, 等. 航天器带电及其表面电位主动控制技术发展现状[J]. 军械工程学院学报, 2017,29(1): 32-37 DAI Y S, ZHANG X J, LUO J F, et al. Present situation of active control technologies concerning spacecraft charging and its surface potential and their developments[J]. Journalof Ordnance Engineering College, 2017, 29(1): 32-37
