Jamming Recognition Based on Feature Fusion and Convolutional Neural Network
2022-04-29SitianLiuChunliZhu
Sitian Liu, Chunli Zhu
Abstract: The complicated electromagnetic environment of the BeiDou satellites introduces various types of external jamming to communication links, in which recognition of jamming signals with uncertainties is essential. In this work, the jamming recognition framework proposed consists of feature fusion and a convolutional neural network (CNN). Firstly, the recognition inputs are obtained by prepossessing procedure, in which the 1-D power spectrum and 2-D time-frequency image are accessed through the Welch algorithm and short-time Fourier transform (STFT), respectively. Then,the 1D-CNN and residual neural network (ResNet) are introduced to extract the deep features of the two prepossessing inputs, respectively. Finally, the two deep features are concatenated for the following three fully connected layers and output the jamming signal classification results through the softmax layer. Results show the proposed method could reduce the impacts of potential feature loss, therefore improving the generalization ability on dealing with uncertainties.
Keywords: time-frequency image feature; power spectrum feature; convolutional neural network;feature fusion; jamming recognition
1 Introduction
The BeiDou satellite navigation system enables wide application in various industries that benefit global users, such as public security, disaster alleviation, and intelligent transportation[1,2].Referring to the system operation, the high orbital altitude of satellites (approximately 10 000 m)would naturally lead to a weak signal power with the long transmission distance[3,4]. Accordingly,slight jamming in the frequency band that overlaps with the satellite signal would prominently affect the functionality of the navigation signal receivers[5,6]. A key issue on that subject is how to conduct jamming recognition to support the anti-jamming strategy design under the complex electromagnetic environment[7].
Traditional satellite jamming recognition methods can be classified as the likelihood-based and feature-based methods[8–11]. Generally, the prior knowledge of the likelihood-based methods limits its practical applications, especially when data has randomness or noise. In addition, feature-based methods heavily rely on expert knowledge to extract jamming features with clear physical meaning, and then design classifiers based on varied features for recognition. J. Liang et al. conducted jamming signal recognition via support vector machine (SVM) and BP neural network, in which 6 features have been extracted from time, frequency and transform domain,such as time-domain kurtosis coefficient, average spectrum flat coefficient, and linear frequency modulation detection coefficient [12]. SVM has also been utilized in M. Li’s work, in which 9 features from time and frequency domain like normalized spectral similarity and normalized frequency bandwidth(NFB) are extracted, and then accomplished communication interference recognition through improved SVM [13]. In both [12]and [13], extensive expert knowledge and prior knowledge are required, which would induce inevitable subjective bias to the recognition process.
In recent years, various kinds of machine learning methods exhibit superiority in automatic feature extractions and classifications, such as classical CNN, which has been frequently applied in image recognition and target detection[14–17]. The boosting machine learning methods essentially enhance the classification ability of the jamming signal in different transform domains [18].
Related works showed that CNN could significantly improve the performance of satellite navigation jamming recognition compared with the previously mentioned traditional methods[19–22]. X. Li et al. proposed an algorithm combining the smooth Wigner-Ville time-frequency analysis method and the CNN framework based on the Squeezenet model to realize the recognition of common jamming signals in satellite navigation, in which time-frequency image acts as the input of the CNN module[23]. M. Xu et al.input the time-frequency image of the communication signal into the improved ResNet for modulation recognition, which performs better in accuracy and training time than traditional methods [24]. In [18], two CNNs are utilized for the jamming recognition with time-frequency image,which avoids the unreasonable feature selection.Besides, J. Li et al. [25] proposed an automatic recognition algorithm for the modulation type of satellite navigation jamming signals based on the decision tree, which is a supervised classification method. Three classification characteristics have been utilized in [25], and they are of pulse width,frequency modulation slope, and bandwidth ratio.
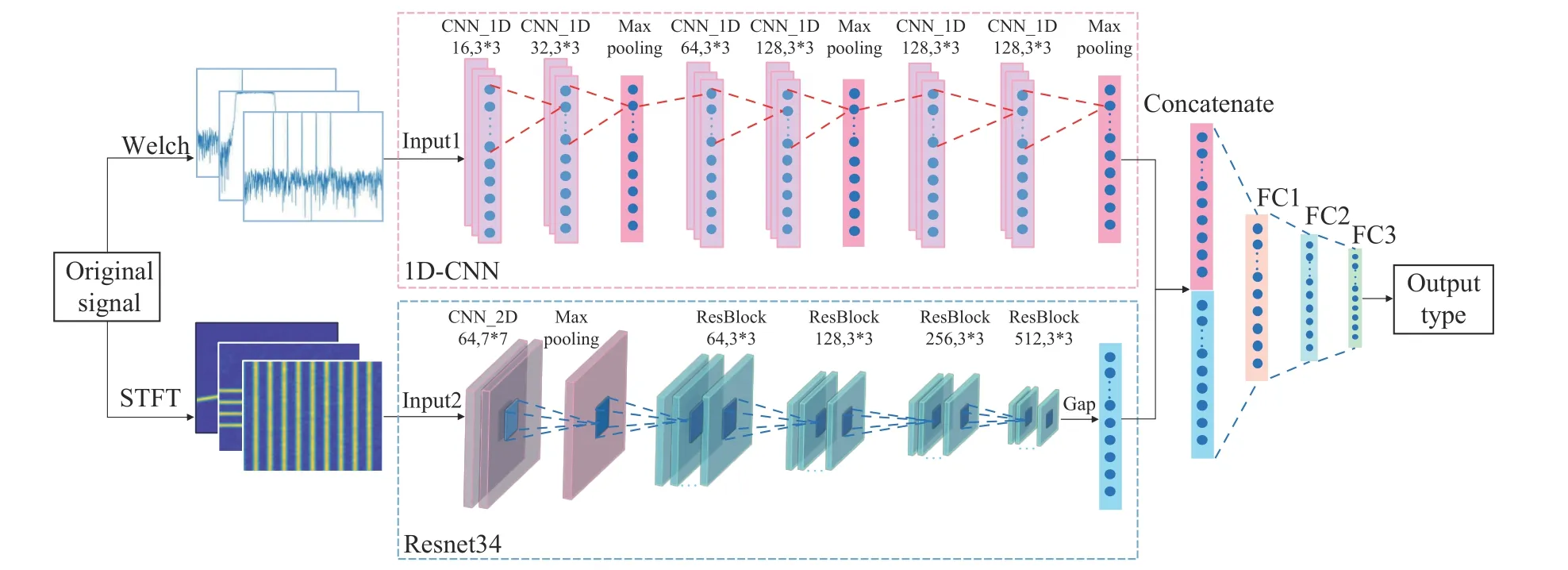
Fig. 1 Jamming recognition algorithm based on feature fusion and CNN
To sum up, the majority of the mentioned methods concentrated on the innovations of network design, while investigation on how to reduce the influence of feature loss on the recognition performance is limited.
2 System Framework
The overall architecture of the jamming recognition system based on feature fusion and CNN is shown in Fig. 1. The power spectrum and timefrequency image are acquired by the Welch algorithm and STFT, respectively. Then, those two inputs would be handled in a parallel way. The depth feature of the signal power spectrum is extracted by the 1D-CNN, which is shown in the red box of Fig. 1. Meanwhile, ResNet is introduced for the depth feature of time-frequency spectrum images, as shown in the blue box of Fig. 1. The outputs of the 1D-CNN and ResNet modules are concatenated together by column,which follows three fully connected (FC) layers.The final signal classification result is exported by the softmax output layer.
The proposed framework eliminates the process of manual feature selection, which requires less expert or prior knowledge compared with previously mentioned studies.
The fusion of the 1D (power spectrum) and 2D (time-frequency image) information provides the feasibility of the framework in reaction to uncertainties.
2.1 1-D CNN Feature Extraction
CNN is a typical type of neural network that is especially suitable for processing data with a similar grid structure[26,27], which has been widely used in the field of image recognition. It generally includes multiple convolutional layers, fully connected layers, and activation functions. Here,we used the 1D-CNN, which is suitable for processing long-term sequences, in which the depth features of the sequence can be extracted by changing the size and moving direction of the convolution kernel. The convolutional layer and nonlinear transformation are defined as follows
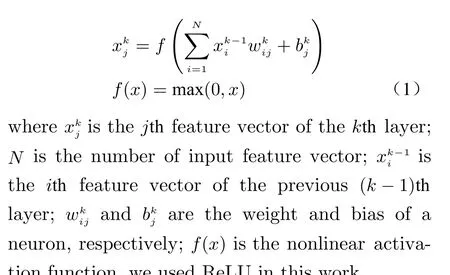
The 1D-CNN is used to extract the deep feature of the jamming signal power spectrum density. On account of the calculation amount and the required number of classifications, six convolutional layers and three pooling layers are selected to construct the module. The jamming signal power spectrum sequence is the input of the network. After convolution and pooling layers, the output is the deep feature vector of the signal frequency domain extracted by the network.
2.2 ResNet Feature Extraction
The internal residual block of ResNet uses jump connections that could effectively alleviate the gradient disappearance caused by increasing depth in the deep neural network[28,29]. The residual block introduces the feature fusion method to integrate the shortcut feature and the backbone feature, which reads,

whereH(x) is the output of the residual block;F(x,wi)is the output of the backbone network;xis the original input; andwiis the linear projection of theith convolutional layer.
Here, we use the ResNet34 network, where the structure of each residual block is the same(as demonstrated in Fig. 2). ResNet34 performs deep feature extraction on the time-frequency image of the jamming signal. In this paper, the global average pooling (GAP) operation is conducted on the output of the features by the Res-Net, in which the average value of the output feature image’s all pixel values is chosen as the representation of the corresponding feature image. That operation could prevent over-fitting problems effectively, as well as reduces the number of trainable parameters and the corresponding amount of computation.
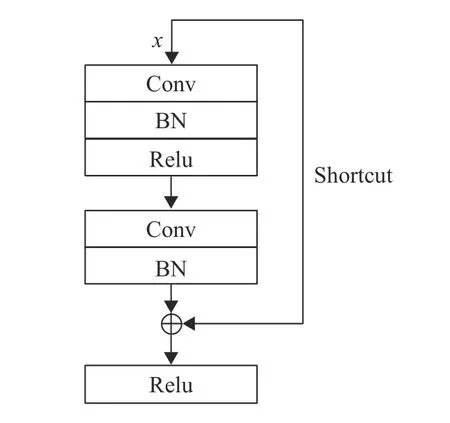
Fig. 2 Residual block structure
3 Jamming Signal Processing
The principle of suppressive jamming is to use a high-power noise signal to raise the signal level of the navigation receiver, worsen the signal-tonoise ratio of its input terminal and finally make the positioning accuracy decrease or the positioning fails. Due to the simple principle and low cost of suppressing jamming, it is the most common type of navigation interference. So the suppressed jamming signal is selected as the signal type for identifications. The synthetic data is processed into the frequency domain sequence and time-frequency image for the deep feature extractions in the next section.
3.1 Jamming Signal Model
The baseband signal input by the jamming classifier isr[n]. Assume the jamming signal passes through the additive white Gaussian noise channel. The input signal includes the jamming signalj[n] and the noise signals[n], which can be expressed as:

The following six typical types of suppressive jamming signals are considered in this paper,and they are Continuous Wave Jamming(CWJ), Surplus Continuous Wave Jamming(SCWJ), Partial Band Noise Jamming (PBNJ),Chirp Jamming (CJ), Noise Frequency Modulation Jamming (NFMJ), and Pulse Jamming(PJ).
3.2 Frequency Domain Sequence Acquisition
Spectrum analysis refers to the Fourier transform of the signal. Through spectrum analysis,information in the frequency domain of the signal can be obtained. The information of energy distribution in the frequency domain could be used to enhance the energy aggregation effect of the time-frequency image. In this section, the amplitude information of the power spectrum is used as the frequency sequence feature (FSF).
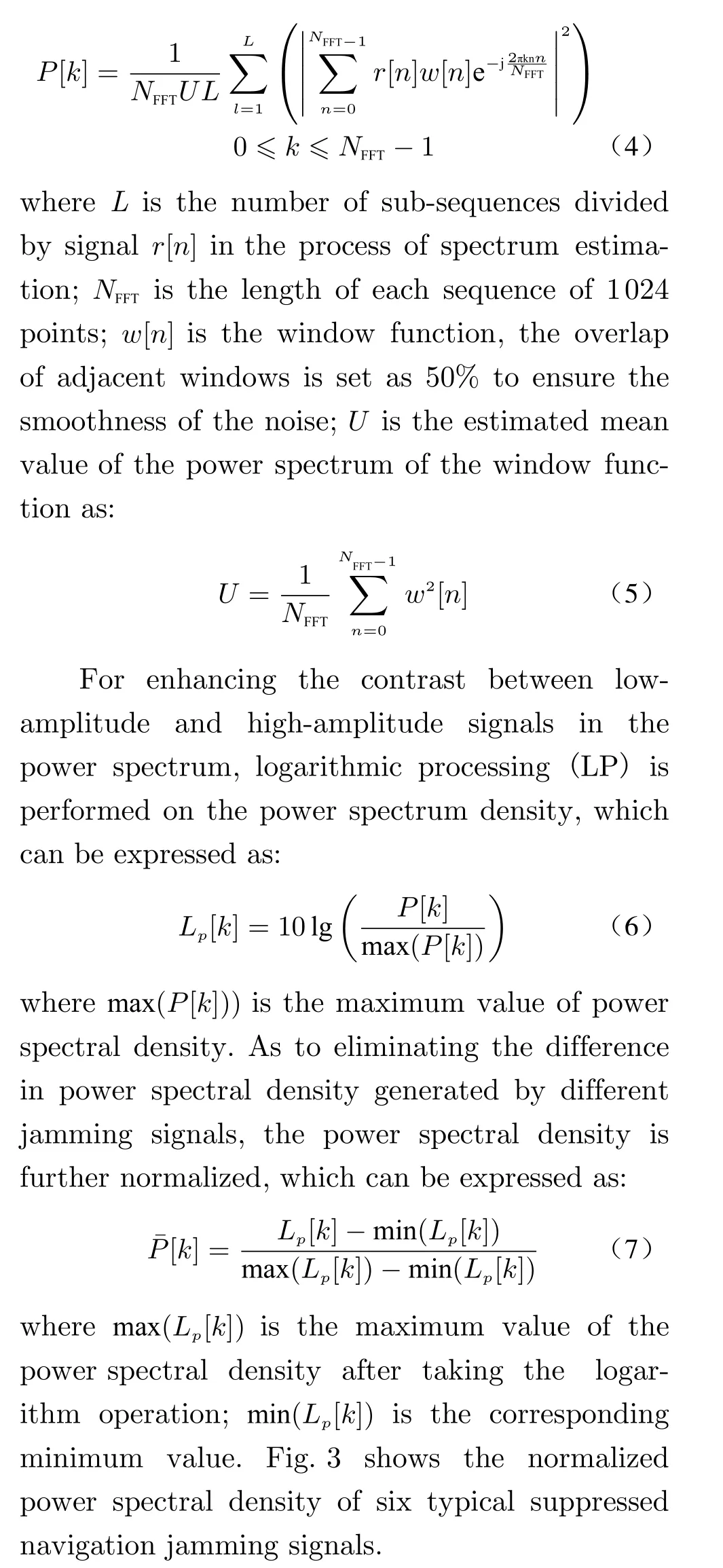
To balance the frequency domain analysis accuracy of the spectrum estimation and the effect of noise smoothing, we adopt the classical Welch spectrum estimation algorithm based on the Hanning window to estimate the power spectrum density of the jamming signal[30]. The power spectral density of the signal estimated based on the Welch classical spectrum of the Hanning window isP[k].P[k] is denoted as
3.3 Time-Frequency Image Acquisition
Time-frequency analysis describes the characteristics of a signal from both the time domain and the frequency domain, which reflect the varying degree of the frequency of the signals over time.STFT is used to extract the time-frequency image (TFI) of the jamming signal.
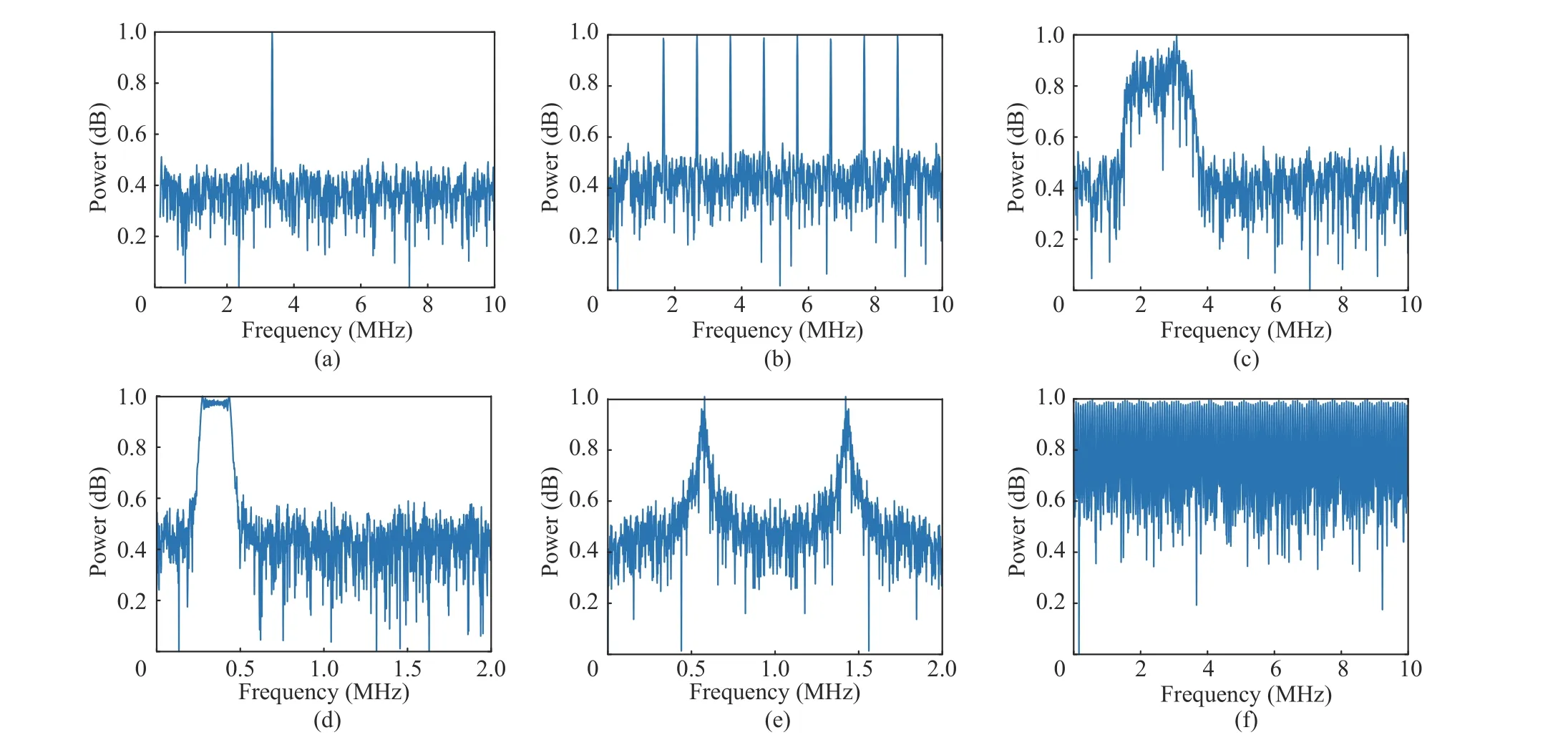
Fig. 3 Power spectrum of typical suppressed jamming signal: (a) CWJ; (b) SCWJ; (c) PBNJ; (d) CJ; (e) NFMJ; (f) PJ
Based on a short window, the basic idea of STFT is to intercept a section of the non-stationary signal to perform fast Fourier transform, and move the window along the time axis to obtain the image of the entire segment of the non-stationary signal, where frequency changes with time. STFT is defined as follows
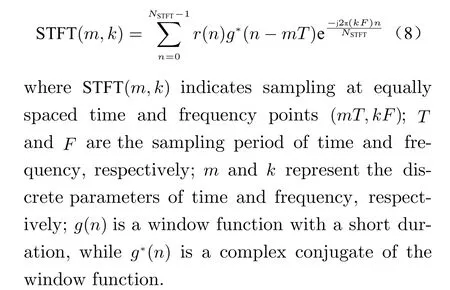
The length of the STFT window would affect the time resolution and frequency resolution simultaneously. The longer length of the window implies the longer intercepted signal, which means lower time resolution and higher frequency resolution, and vice versa. Considering the resolution requirements of the adopted jamming signals, we chose the length of window functionNSTFTas 256 points, for the jamming signal with a length of 1 024 points.
For the convenience feature extraction, we transformed the time-frequency images to a uniform size of 224 * 224. The time-frequency images of the investigated six typical suppressed navigation jamming signals are shown in Fig. 4,in which the horizontal and vertical coordinates are time sampling number and frequency sampling number, respectively.
4 Simulation Analysis
To verify the effectiveness of the proposed jamming recognition algorithm, this section would demonstrate the classification performance. Here,we mainly conducted classification on the single jamming signal.
4.1 Data Set and Parameter Setting
The data set contained six kinds of jamming signals: CWJ, SCWJ, PBNJ, CJ, NMFJ, and PJ.Parameters of synthetic jamming signal are shown in Tab. 1, where the jamming center frequency was selected within the range that the jamming bandwidth does not exceed the analysis bandwidth. The jamming signals in the simulation were all random setting signals. For example, the jamming amplitude, the number, and position of the jamming tones, as well as the initial jamming frequency and bar frequency of the sweep jamming were all random. This setting helped reveal the ability of the proposed framework to uncertainties.

Fig. 4 Time-frequency image of typical suppressed jamming signal:(a) CWJ; (b) SCWJ; (c) PBNJ; (d) CJ; (e) NFMJ; (f) PJ

Tab. 1 Jamming signal parameter setting
Here, the sampling frequency of the data was set as 20 MHz; the number of sampling points was 1 024; the JNR range was selected in the range of [–20 dB, 20 dB] with the 1 dB interval.For each signal, we generated 820 samples randomly. The number of samples in the data set was 4 920, in which we selected 80% of the data as the training set, and 20% as the test set.
4.2 Jamming Recognition Performance
Within the range of [–20 dB, 20 dB], 100 epoch simulations were performed every 1 dB, to calculate the recognition accuracy of various jamming signals with different JNR. It can be seen from Fig. 5 that when the JNR increases, the recognition accuracy has been significantly improved and eventually approaches 100%. Among them,the recognition accuracy of CJ and NFMJ is 100%, which indicates that the jamming recognition algorithm has an excellent recognition effect on these two jamming signals. Additionally, when the JNR is 0 dB, the recognition accuracy of the six jamming signals exceeds 88%. It is worth noticing that when the JNR is 2 dB, the recognition accuracy rate exceeds 90%.
From Fig. 5 and Fig. 6 (a), the recognition effects of PJ, PBNJ, and SCWJ are slightly inferior to the other three signals under the low JNR. It could be explained that PJ, PBNJ, and SCWJ were affected by noise under low JNR,which results in a decrease in the definition of time-frequency images.
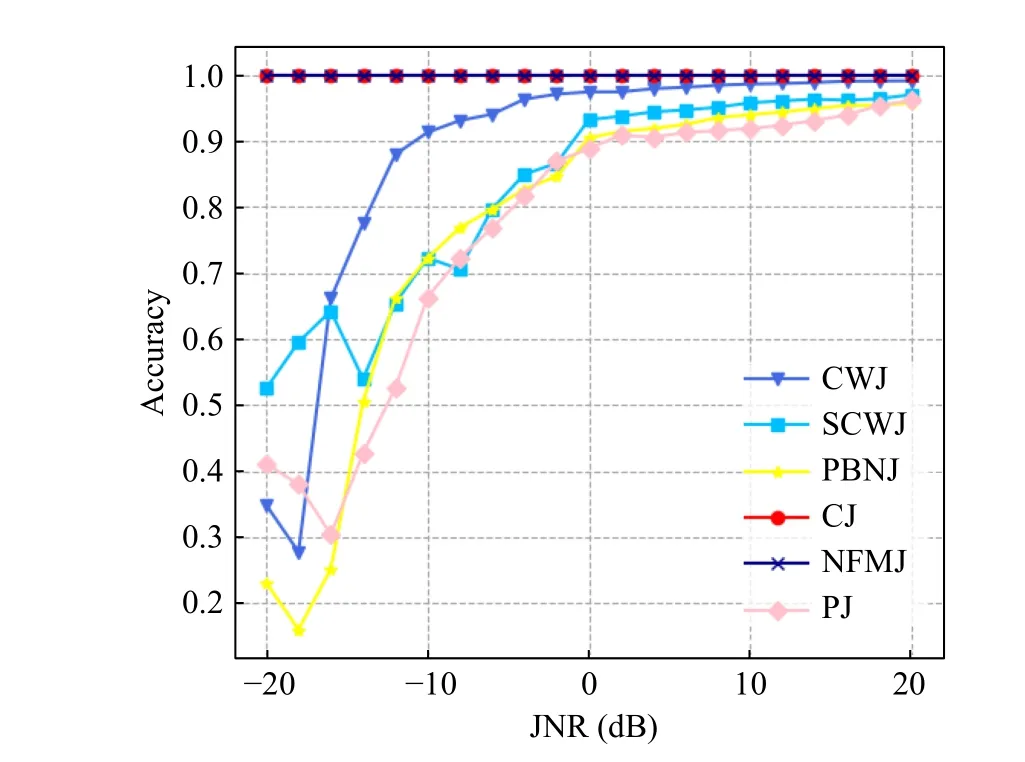
Fig. 5 Interference recognition accuracy rates under different JNRs
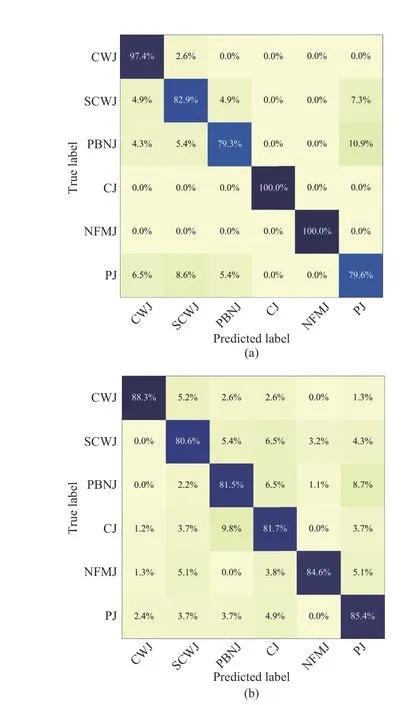
Fig. 6 Confusion matrix of different interference recognition accuracy: (a) our work; (b) in [24]
Moreover, the details of the three images are very similar. Although the recognition accuracy in Fig. 6 (a) is not that high, it is caused by the relatively large JNR ratio range of the selected signal. The JNR ratio selected in this paper is in the range of [–20 dB, 20 dB], and a lower JNR ratio will affect the accuracy of jamming recognition. The confusion matrix of the recognition accuracy of the jamming signal by the neural network framework of [24] is shown in Fig. 6 (b).Compared with Fig. 6 (b), it is obvious that the method in this paper has a better jamming recognition effect. The recognition accuracy of SCWJ,CJ, and PJ is not much difference between the two methods, but the method in this paper has higher recognition accuracy for CWJ, CJ, and NFMJ.
The results of the two methods under different JNRs are shown in Tab. 2. Results show that with the reduced range of JNR signals, the recognition accuracy is significantly improved. Compared again with the method in [24], the recognition accuracy of reported ranges is better than a preferable existing work.

Tab. 2 Comparison of recognition accuracy under different JNR ranges
Taking JNR=0 dB as an example, we compared the classification accuracy of the proposed jamming recognition framework with the algorithms for single object classification. Results are shown in Tab. 3, in which TFI-ResNet represents we only input the time-frequency image of the jamming signals to the ResNet for training, and FSF-CNN means that we only input the power spectrum characteristics of the jamming signal into the sub-network 1D-CNN for training.Results showed that the proposed framework that combines the characteristics of frequency domain and time-frequency domain could improve,and the recognition accuracy of each jamming signal with randomness, which reflects the feasibility and necessity of the feature fusion for jamming recognition.
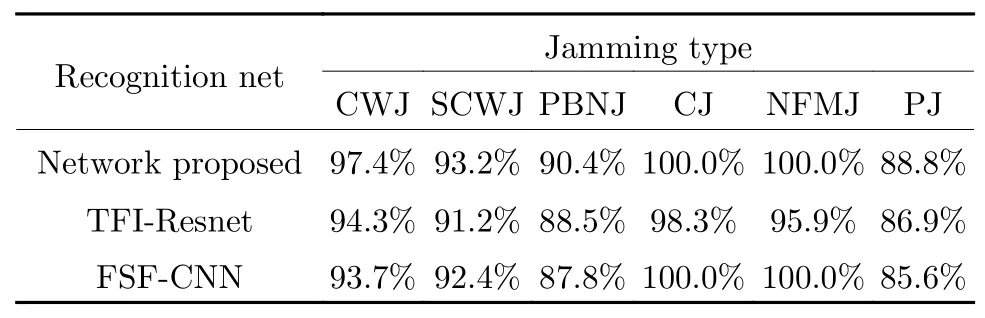
Tab. 3 The recognition accuracy of different algorithms(JNR=0)
5 Conclusion
In this work, we proposed a jamming recognition framework based on the feature fusion and CNN,which effectively improves the classification performance, especially on the synthetic data with randomness. The fusion of power spectrum and time-frequency image could reduce the potential impacts of possible feature loss on the recognition, therefore improving the generalization ability in dealing with uncertainty. The proposed framework uses 1D-CNN and ResNet, for the deep feature extraction of the frequency domain 1D vector and time-frequency domain 2D image,respectively. The recognition of the fused deep features illustrates the feasibility and scalability of the framework. Results show the effective improvement over the random generated typical navigation jamming signals. In the future, we will further conduct investigations on more complicated navigation jamming signals, to explore how to suppress noise under low signal-to-noise ratios and further enhance the recognition accuracy.
杂志排行

Journal of Beijing Institute of Technology的其它文章
- Objective Quantification of Small Motor Sound Quality Based on Psychoacoustic Metrics
- ISAR Imaging and Cross-Range Scaling Based on Image Rotation Correlation
- Jamming Monitoring Technology of the Space Situational Awareness Facilities:A Comprehensive Survey
- Fast Rail Defect Inspection Based on Half-Cycle Power Demodulation Method and FPGA Implementation
- Restoring Polarization Angle Map for High-Fidelity Underwater Imaging
- Unmanned Technology-Based Civil-Military Intelligent Logistics System : From Construction to Integration