基于域变换的机载火控雷达工作模式识别技术
2022-04-27张生杰张译方徐才进邱光辉
张生杰 周 超 张译方 徐 晶 徐才进 邱光辉
(西南电子设备研究所 成都 610036)
0 引言
在作战过程中,为了能快速响应战场变化,以便做出正确的对抗响应,必须准确识别对敌机载雷达的工作状态,例如:当敌机机载雷达对载机进行跟踪时,对载机构成非常大的威胁,敌机随时可能发射空空导弹,当敌机雷达辐射源工作模式从近距离搜索向跟踪模式转变时,极可能是导弹攻击的前兆,载机需及时破坏敌机机载雷达跟踪状态迫使其转为搜索状态,从而降低对载机的威胁。及时准确地判识雷达辐射源的工作模式对指挥员迅速调整战斗措施具有十分重要的意义。
通过对敌机机载雷达工作模式的准确识别进而判断敌方机载雷达的工作状态,最终达到敌方威胁等级准确判断,敌机目标威胁等级将直接影响作战系统对目标干扰决策的管理,针对雷达不同工作模式,采取不同的最佳干扰样式。因此对机载雷达工作模式的识别在机载自卫电子对抗措施(ECM)中具有非常重要的作用。
针对雷达工作模式识别技术难点,目前已有的雷达工作模式识别算法有以下几种:利用脉冲特征参数构建相参处理间隔特征矩阵,将获得的特征矩阵与雷达知识库进行关联,实现雷达工作模式的识别;在对雷达天线扫描特性进行分析的基础上,基于幅值包络分析的工作状态识别方法,能对搜索和跟踪两种工作状态进行识别;依据扩展脉冲描述字(PDW),基于DS证据推理理论的机载火控雷达工作模式判别算法;采用去噪自动编码器自适应地对雷达不同工作模式的信号特征学习和识别,避免了传统模式识别中特征提取和特征选择两个过程,但该方法容易造成对训练样本的过拟合,缺乏泛化能力。上述工作模式识别算法均存在不同程度缺陷,无法实现机载雷达工作模式实时准确判识。
本文针对雷达的典型工作模式进行分析,将时间序列相似性度量技术应用在雷达工作模式识别中,提出了基于域变换的机载火控雷达工作模式识别技术,实现在变换域上机载火控雷达工作模式的准确识别,极大的提高了识别精度和准确率。
1 机载雷达工作模式分析
机载火控雷达对空工作时的主要工作模式包括SAM(Situation-Awareness-Mode,威胁态势感知)、RWS(Rangle-While-Search,边测距边搜索)、TWS (Track-while-scan,边搜索边跟踪)、STT(Single- Target-Track,单目标跟踪)。上述四种工作模式的特点如下所述。
1.1 SAM(威胁态势感知)
该方式同时提供搜索和跟踪的功能,在提供对不多于两个目标进行高质量跟踪的同时,还能在特定的空域内,实现对可疑目标扫描搜索,高质量跟踪精度可以充分满足导弹对各种超视距目标的攻击。当发现有高威胁目标出现,或需要以雷达全部资源去跟踪一个特定的目标时,载机雷达可自动转入单目标跟踪方式(STT)。
1.2 RWS(边测距边搜索)
提供低精度距离、速度、角度信息,全方位和在严重杂波环境中的空战目标的探测。使用高峰值功率和中重复频率波形时,可提供精确的目标数据,并具有良好的全方位探测特性和最小的盲区。
1.3 TWS(边搜索边跟踪)
在搜索过程中,当天线波束扫描通过跟踪目标方向时,对其进行跟踪,因而跟踪数据率与搜索数据率相同。
1.4 STT(单目标跟踪)
可以从任何一种空对空状态进入这种状态,实现特定目标可靠的精确跟踪,STT状态提供跟踪数据,以便支持近距和超视距空对空导弹的发射,也能提供近距射击状态的机炮瞄准具的射击包线。
敌方机载目标的威胁程度直接取决于当时机载雷达的工作模式,如若探测到敌方机载雷达的工作模式从RWS(边测距边跟踪搜索)向STT(单目标跟踪)模式转变时,这极有可能是导弹攻击的前兆,及时准确地判断出敌方机载雷达的工作模式对指挥员迅速调整战斗措施具有十分重要的意义。
2 机载雷达工作模式识别算法
本文通过时间序列相似性度量算法对RWS、TWS、SAM、STT等机载火控雷达四种典型工作模式进行数学化建模,通过对全脉冲序列变化进行分析比较,发现可通过脉冲重复周期和幅度参数的时序变化对上述四种工作模式进行有效区分。RWS、TWS、SAM、STT四种工作模式脉冲重复周期和幅度变化如图1、图2、图3、图4所示。

图1 RWS模式重复周期及幅度变化

图2 TWS模式重复周期及幅度变化

图3 SAM模式重复周期及幅度变化

图4 STT模式重复周期及幅度变化
从图1至4中可知,从幅度变化可以区分STT、RWS、SAM三种工作模式,而RWS和TWS的幅度变化相同,需要通过重复周期()的变化区分。
2.1 总体思路
参照时间序列相似性度量算法,本文通过适当变换建模表征不同工作模式的幅度和联合变化情况,采用特征表示方法将高维空间中的时间序列数据映射到低维空间,实现数据降维,降维后的特征数据能够有效表征不同工作模式的参数变换规律,根据特征参数进行分类识别。
因此本文采用基于域变换的时间序列特征提取方法,采用快速傅里叶变换(FFT)算法,将时间序列采用信号处理的方式实现时间域与频率域之间的转换,再利用频率域下的有限个特征数据来近似表示原始序列。由于FFT变换后的低振幅系数对时间序列重建的贡献很小,而且FFT产生的大多数系数都是低振幅,因此只需要部分高振幅系数就可以近似拟合原时间序列数据,一般情况下前10个傅里叶系数就可以充分表示原时间序列。
对四种工作模式的脉冲重复周期()和幅度参数进行快速傅里叶变换(FFT),分别取参数和幅度参数序列FFT变换结果的前10个傅里叶系数作为分类特征。考虑到分别特征的非线性,因此通过SVM分类器进行分类判识,实现雷达工作模式的准确识别。
2.2 系统设计
针对机载火控雷达目标工作模式识别率较低的问题,本文采用快速傅里叶变换和SVM分类算法实现工作模式的智能化识别,该方法整体识别流程如图5所示,主要分为训练过程和识别过程。

图5 FFT变换+SVM分类器实现
其中,训练过程为:
1)预处理
预处理的流程如图6所示。主要步骤如下:

图6 预处理流程
①数据解析:根据全脉冲数据接口格式,对数据进行解析,同时根据装备全脉冲数据记录格式标准,处理时间翻转等情况;
②频段过滤:为滤除噪声及背景信号影响,根据已知数据接收情况,按照频段进行过滤;
③切分及抽样:对上述全脉冲序列按照时间的连续性进行切分。若前后两个到达时间间隔大于某一个阈值,则认为是当前工作模式的结束和下一个工作模式的开始。其次,对切分后的每帧数据,按照给定抽样后个数进行等间隔抽样,抽样后个数不足的按最小值补齐;
④归一化:采用RobustScaler方法对数据进行归一化处理,该方法能够忽略由于测量误差造成的异常值,相比于MinMaxScaler和StandardScaler更具有鲁棒性;
⑤数据变换:为同时表征幅度和的变化情况,将脉冲重复周期()和幅度两维参数以向量的形式作为数据预处理的输出。
2)快速傅里叶变换
分别对数据预处理后的和幅度数据进行FFT变换。假设抽样后离线时间序列数据为
{(),=1,2,3,…,}
其中,()为抽样后的离散时间序列数据。运用离线时间序列数据,进行离散傅里叶变换,具体为

其中()为离散傅里叶变换后的傅里叶系数,取傅里叶变换结果的前10个傅里叶系数作为FFT变换结果。
3)标签加载
根据先验知识,对FFT变换后的数据加上标签,其中1代表RWS;2代表TWS;3代表SAM;4代表STT。
4)分类器训练
由于FFT变换后的具有非线性、高维、稀疏的特点,因此,采用SVM分类器进行分类识别,以获取高维稀疏数据的非线性分类边界。
识别过程为:
①数据预处理
识别过程的预处理和训练过程的预处理过程相同,即需要对原始的全脉冲数据进行解析、过滤、切分抽样等操作。
②特征提取
对待识别数据的PRI和幅度进行FFT变换,提取傅里叶系数作为下一级分类识别器的输入特征。
③分类识别
基于傅里叶系数特征,采用SVM分类器对数据进行分类识别。
3 仿真分析
为了验证算法的有效性,采用仿真数据进行验证分析,对机载火控雷达四种工作模式进行识别。
TWS、RWS、SAM、STT模式的数据FFT结果如图7、图9、图11、图13所示,幅度数据FFT变换结果如图8、图10、图12、图14所示。

图7 TWS模式PRI及FFT变换结果

图8 TWS模式幅度及其FFT变换结果

图9 RWS模式PRI及FFT变换结果

图10 RWS模式幅度及FFT变换结果

图11 SAM模式PRI及FFT变换结果

图12 SAM模式幅度及FFT变换结果

图13 STT模式PRI及FFT变换结果
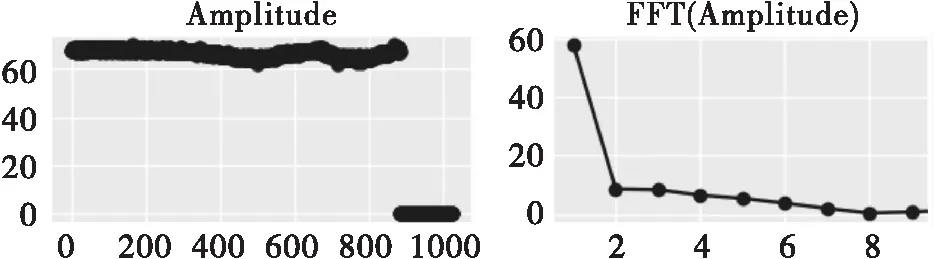
图14 STT模式幅度及FFT变换结果
通过对FFT变换结果分析,SAM模式幅度变化规律比较明显,通过FFT变化后的傅里叶系数可明显区分出与其他工作模式的区别,在STT工作模式和幅度FFT变换结果中,第一个傅里叶系数均较大,后面的傅里叶系数非常小,并且傅里叶系数呈递减趋势,可根据此变化规律识别出STT工作模式数据,RWS与TWS的幅度变化规律差异很小,结合PRI维度的FFT变换结果区分,TWS模式PRI维度FFT变换结果相对RWS变换结果,第二个傅里叶系数要小很多,通过此特征可区分TWS和RWS两种模式。
SVM分类器核函数kernel采用rbf,考虑到分类器的数据不均衡,因此样本均衡参数class_weight设置为balanced,最大迭代次数设置为10次,惩罚系数C=10.0,gamma为0.9。
本文采取了识别率与误警率来评价分类效果,其定义如下:


本文通过Matlab仿真产生试验数据,针对每个工作模式仿真产生10万个扫描包络的全脉冲数据,进行100次重复试验,试验结果如表1所示,SAM、STT、RWS模式识别率均在90%以上,TWS模式识别率较低,整体识别率为93%,单包络识别时间不大于3 ms。
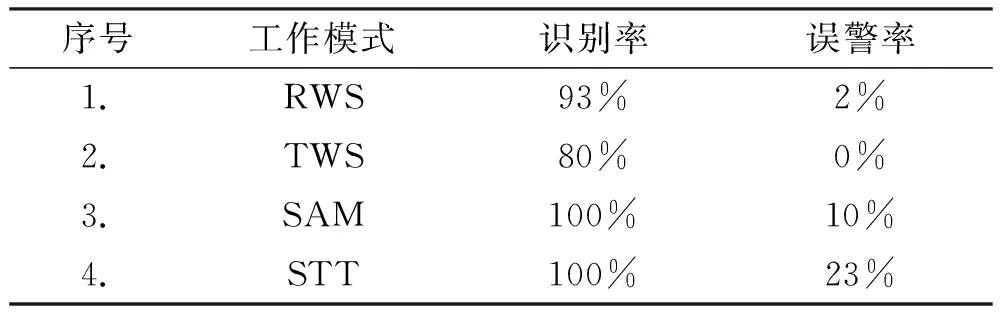
表1 识别结果
4 结束语
本文借鉴时间序列模式挖掘中的相似性度量方法,提出基于域变换的机载火控雷达工作模式识别算法,结合人工智能识别算实现机载火控雷达目标工作模式的准确识别,该方法通过演习数据进行测试验证,针对SAM、STT、RWS、TWS四种工作模式综合识别率在90%以上,表明该算法切实可行。