自适应滑模观测器PMSM无位置传感器控制*
2022-04-26冯仁宽何志琴
冯仁宽,何志琴
(贵州大学电气工程学院,贵阳 550025)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)是由绕线转子同步电动机发展而来。永磁同步电机的效率和功率高于同体积的感应电机,即功率密度更高。这在高性能的控制场合尤为重要,受到了广大学者和工程师的青睐,成为研究热点。PMSM无位置传感器控制技术无需安装机械传感器等测量装置,使用电流、电压信息重构转子的位置和速度,极大地降低了系统的成本、减少了安装维护、外界干扰的棘手问题,因此无位置传感器控制技术[1-2]成为研究热点。
许多学者提出了多种无位置传感器控制方法,其中滑模变结构控制系统由于对电机参数依赖小、对系统内部外部干扰鲁棒性强等优点得到了广泛的应用[3]。但另一方面由于滑模观测器自身机制引起的系统抖振会影响对电机转子和转速的估计,为了消除或削弱这种抖振,张慧柔[4]提出了一种引入扰动补偿的混合非奇异终端滑模速度控制策略,该方法改善了系统收敛速度的同时也削弱了系统的抖振,但该方法计算相对复杂。孙佃升[5]提出了一种使用滤波技术滤波后的反电动势作为反馈的滑模观测器改进方法,降低了系统的抖振,该方法经过滤波后反电动势会出现相位的延迟。
针对永磁同步电机无传感器控制的转子位置和转速估计误差较大的问题,本文提出了一种新型的滑模观测器设计方法。在永磁同步电机的数学模型的基础上,结合自适应算法设计一种新型的自适应滑模观测器估算电机的转子位置和转速,并使用李亚普诺夫理论证明了算法的收敛性。为了减少系统的抖动,使用继电特性进行连续化,采用连续函数θ(s)代替符号函数sgn(s)。为提高反电动势的估计精度,推导和建立估算的自适应率,采用自适应环节代替滤波器,为了减少转子位置和转速的估计误差,采用锁相环代替反正切函数估计位置和转速。最后对上述算法进行仿真以验证该方法理论分析的有效性。
1 PMSM数学模型
id=0的表贴式永磁同步电机在两相定子电压-电流坐标下方程[6-9]可表示为:
dis/dt=Mis+Nvs+Kees
(1)

[eαeβ]T=[-ψfwesinθψfwecosθ]T
(2)
微分得
(3)
式中,we、θe、ψf分别为电机的电角速度、电角度和永磁磁链。
由式(2)可知电机的反电动势与转速和位置有关,观测反电动势能获取电机的转速和位置。当电机的转速越大观测出的反电动势越明显,误差越低[10]。
2 自适应滑模观测器
2.1 滑模观测器设计

(4)
其中,
(5)

取李雅普诺夫函数(Lyapunov)为:V=1/2[S(X)TS(X)],要使上述设计的滑模观测器收敛,必须有dV/dt<0,即:

(6)
可得:
选择合适的k值可以使上述的滑模观测器收敛到实际值。
由式(1)、式(3)可得电机定子电流的误差方程:

(7)
(8)
由于滑模观测器自身的机制,使得实际的控制量是一个不连续的高频切换信号,式(8)得到的反电动不能直接应用。采用自适应的估计环节来提取反电动势,这种方法相比传统使用低通滤波器得到的反电动势波形更加光滑。
2.2 自适应律
通过引入自适应参数f,选择合适的反电动势自适应律,使估计的反电动势波形更加光滑,使得锁相环对PMSM转子位置和转速的估计误差减小。
根据式(3),本文建立如式(9)所示的转子位置和转速估算的自适应律:
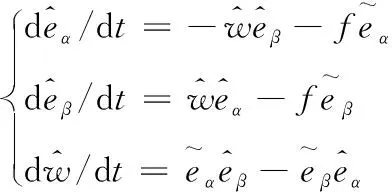
(9)
式中,f为正常数。由于永磁同步电机的电气时间常数很小,可以认为在一个周期内转速不变,即dw/dt=0,结合式(9)可推得:

(10)
2.3 自适应滑模观测器的稳定性证明
取李雅普诺夫函数:
(11)
将式(10)带入式(11)则有:
(12)
即本文所设计的改进型自适应滑模观测器是渐近稳定的,可以收敛到实际值。
3 转子位置和转速的锁相环估计
由于滑模控制在滑动模态下估算的反电动势中将存在高频抖振现象,而反正切函数的转子位置估计方法将抖振直接引入到反正切函数的运算中,造成较大的角度估计误差。本文采用锁相环(phase-locked loop,PLL)技术来估算电机的位置和速度信息[11-12],其原理框图如图1所示。
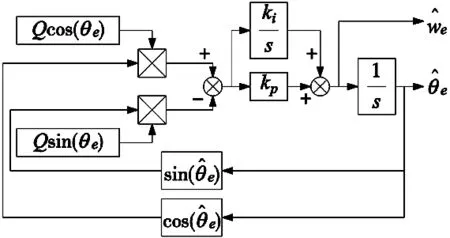
图1 转子的位置和转速的锁相环估计框图
根据结构图结合式(2)可得构建的观测器为:
(13)
(14)
微分得:
显然在第一个平衡点领域内dV/dt<0,系统稳定收敛。在第二个平衡点领域dV/dt>0,系统发散,此时估计的位置会发散远离该平衡点,但由于电角度是以2π为周期变化,当远离发散的区域之后又会进入收敛的区域,从而稳定收敛到第一个平衡点。

图2 转子的位置和转速估计结构图
可得系统的误差传递函数:
(15)
由式(15)可得锁相环的稳态误差为:
(16)
通过以上的分析结果满足李雅普诺夫的渐进稳定性条件,即该锁相环可以对电机的转子位置和转速进行准确的估计。
4 仿真验证
通过以上的理论分析,在矢量控制的基础上得出定子在两相静止坐标系下的电压和电流,结合所设计的自适应滑模观测器和锁相环估计出转子的角度和位置,其整体结构框图如图3所示,为PMSM无传感器控制系统结构图,在MATLAB下搭建其仿真模型,被控电机具体参数如表1所示。
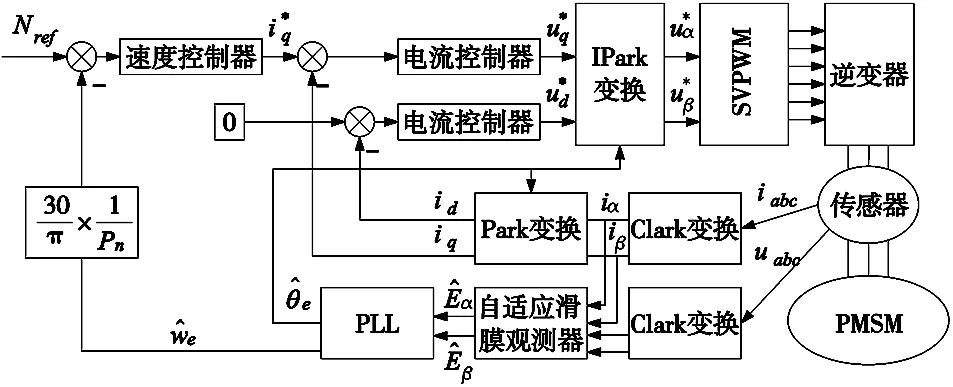
图3 永磁同步电机无传感器控制系统框图
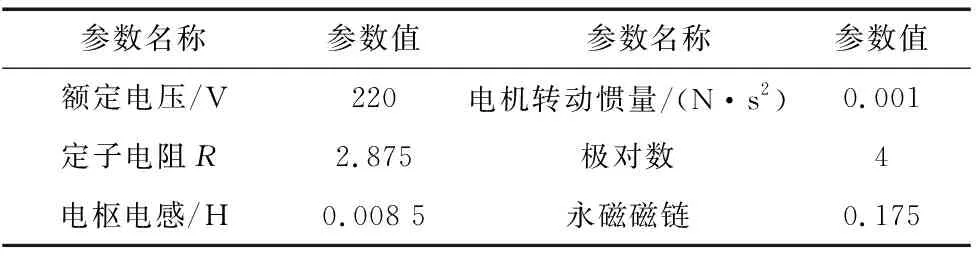
表1 永磁同步电机的具体参数
以下分析转速给定值为500 r/min下空载起动,在0.5 s时,电机转速给定值突升为1200 r/min时观测的位置和转速的波形。这里改进型自适应滑模观测器的自适应参数f为20 000,滑模增益k为100。
将改进型的自适应滑模观测器估计的位置和转速波形同传统的滑模观测器相比较,来分析算法对系统性能的影响,如图4所示是改进前后的反电动势估计波形对比,取突加转速周围的时段,可以看出在0.5 s转速给定值突升为1200 r/min时,改进后的观测器波形过渡更平缓,超调更小。

图4 滑模观测器反电动势估计波形图
改进前后的转速估计波形如图5所示。
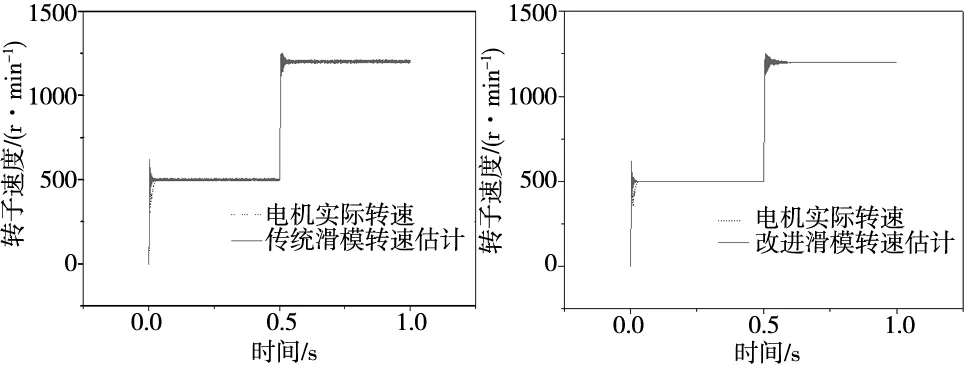
图5 滑模观测器转速估计波形图
可以看出两种观测器都能很好地跟踪电机的转速波形,但改进后的波形更光滑、系统的抖振明显减小。当在0.5 s时,转速给定值突升为1200 r/min时,传统的滑模观测器系统的抖振更明显,且伴随毛刺的现象,而改进后的观测器明显改善了系统的抖振,使波形更加的光滑。
将转速的给定值与估计值作差可得电机的转速估计误差,如图6所示。

图6 滑模观测器转速估计误差波形图
仿真结果表明,当电机转速设定值为500 r/min时,传统型滑模观测器的估计误差为10 r/min,而改进后的观测器估计误差为0.5 r/min,其改进后的观测器转速估计精度提高了95%。
为了更好地比较传统滑模和改进后的滑模位置估计误差,将电机的实际位置与估计值作差可得电机的位置估计误差如图7所示,其中上图是取仿真时间段为0.11 s~0.19 s时的局部放大图。
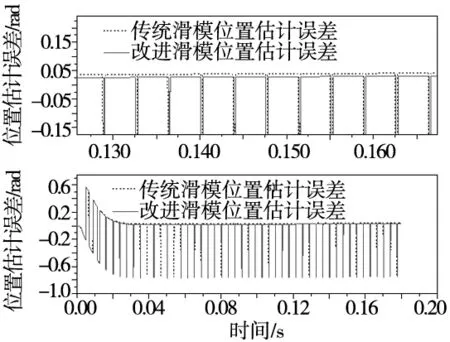
图7 滑模观测器位置估计误差波形图
仿真结果表明,当电机在转速设定值为500 r/min时,传统型滑模观测器的估计误差为0.037 5 rad,而改进后的观测器估计误差为0.025 rad,其改进后的观测器转速估计精度提高了33.3%。综上仿真的结果和算法理论分析一致,改进后的滑模观测器估计精度更高,系统的抖振更小、过渡更平稳。
5 结束语
本文在传统的滑模观测器的基础上设计了一种新型的自适应滑模观测器。其仿真表明改进后的自适应滑模观测器转子转速的稳态误差为0.5 r/min,和传统的滑模观测器相比提高了95%,位置稳态误差为0.025rad,和传统的滑模观测器相比提高了33.3%。综上所述改进后的自适应滑模观测器能够实现PMSM无位置传感器的高精度控制,在此基础上可以选取合适的准滑动模态函数和自适应参数进一步改善系统的控制精度。
