面向有人/无人机协同远程作战的IVMS架构
2022-04-26胡嘉悦李广文章卫国张超贾乾磊
胡嘉悦,李广文,*,章卫国,张超,贾乾磊
1.西北工业大学 自动化学院,西安 710072 2.航空工业第一飞机设计研究院,西安 710089
鉴于军事技术的快速发展,各国也在不断发展全方位一体化防空与雷达预警网络,这使得远距离突防与作战任务更加难以完成。而且面对愈发复杂的战场环境和任务需求,飞行员在操纵飞机的同时难以准确高效地实施作战规划与决策。此外,随着无人机和智能技术的发展,很多国家也着眼于有人/无人机协同作战的研究,以便在复杂战场中以较低的经济消耗,取得更大的军事效益,但是,这也对飞行员处理多种复杂信息的能力提出了更高的要求。
为了满足这种需求,英国空军在20世纪70年代首次提出飞行器管理系统(Vehicle Management System, VMS)的概念,主要目标是通过对机内各子系统的协调与资源共享提升全局飞行性能与作战效能。1996年,北约航空发展和研究咨询组织(AGARD)出版的综合飞机管理系统研究报告,对综合飞行器管理系统(Integrated Vehicle Management System, IVMS)总体研究进行了论述。研究指出,IVMS通过对系统功能和物理综合,实现对战机系统的综合控制、决策管理、资源配置和诊断监测等。正是因为IVMS所具备的巨大优势,使其成功地应用到了F-22、F-35、B777等型号。
除此之外,国内许多研究机构也对飞行器管理系统的总体发展进行了分析论述。较早关注该领域的北京航空航天大学申功璋团队从对飞行器全系统物理与功能综合和面向飞行能力优化两方面深入分析了VMS的设计,并提出了综合飞/推控制、主动重心控制、综合热管理以及综合飞控/航电等关键问题。陈琪和万剑锋指出综合战术任务/飞行器管理系统技术是现代航空技术的发展趋势,但仍将任务管理和飞机子系统管理分别处理。张喜民和徐奡从具体型号出发,对比分析了F-22、EF-2000和F-35的IVMS体系架构,指出高度的功能综合、网络化、分布式开放系统结构是IVMS显著特征。吴文海等在近十年中进行了多角度的分析,逐步完善了飞行器管理系统的结构框架、基本功能和关键技术。此外,对于IVMS具体的设计与验证主要体现在部分子系统的综合上。在任务管理系统方面,有基于信念-愿望-意图(Belief-Desire-Intention Theory, BDI)的自主任务管理系统,基于模型系统工程(Model Based on Systems Engineering,MBSE)方法论的无人机任务管理系统以及硬件设计与实现;能量管理方面,陆宾宾针对超声速飞行器,设计了一种热管理系统并进行仿真计算,满足了在飞行任务全包线范围内的热管理需求;任务调度方面,孙大伟等设计并仿真验证了基于蚁群算法的多处理机任务调度方法;有人/无人机编队协同方面,王新尧等考虑有人机飞行员状态和异构无人机的不同依赖程度对决策的影响,设计了一种高鲁棒性的作战决策系统架构。
通过对相关文献资料的分析可以发现,目前IVMS相关的研究还存在以下2方面的不足:
1) 尽管中国对IVMS的研究逐渐深入,但任务决策与飞机子系统管理仍然相对分立:任务决策通常更关注于战场态势与情报,飞机自身性能仅作为固定约束考虑;而飞机子系统的管理则主要关注于通过管理传感器信息和机上能源,使飞机实现自动飞行,但对作战的适应性缺少考虑。
2) 现有的相关IVMS的研究,主要着眼于一架作战飞机的子系统综合管理和“资源”调度,对集群/协同作战场景下的IVMS缺少研究,但是,若将协同作战飞机上“资源”也作为IVMS决策的对象,将进一步提升作战效能。
针对上述问题,本文在传统IVMS的基础上提出一种面向有人/无人机协同远程作战场景的系统架构:
1) 考虑了远程作战中的长航程需求,以及有人/无人机协同作战场景下对整个机群的规划需求两方面,提出了一种面向有人/无人机协同远程作战的IVMS架构。
2) 将有人机的子系统和无人机携带的设备综合考虑,设计基于数据交互与调度的逻辑架构。该架构将作战机群所具有的设备和“资源”看作一个整体,通过调度有人机和无人机上资源提高性能,降低自身性能对任务的约束,提高机群的作战效能。
3) 设计了基于分层模式的软件架构,整合不同功能中相同的数据、算法、约束需求以及相关流程,降低软件复杂程度,优化层次交互关系,为进一步的IVMS仿真研究和硬件设计提供参考。
本文首先对有人/无人机协同远程作战的场景进行分析,基于作战中各飞行任务阶段,提炼该场景下对IVMS的功能需求,并将各需求整合。第2节基于整合的5个主要功能,以提升作战效能为目标,设计基于数据交互IVMS逻辑架构。从系统的软件实现角度分析IVMS,在第3节中,提出了一种基于分层模式的软件架构,优化功能之间的层次交互关系。第4节对全文进行了总结。
1 面向有人/无人机协同远程作战的IVMS功能分析
有人/无人机协同远程作战的任务场景给IVMS系统提出了新的需求。一方面为了实施更远距离的战略巡航与作战,提出了延长作战半径需求;另一方面,具有战术决策优势的有人机和具有灵活作战与控制优势的无人机协同作战的模式,提出了从协同角度优化任务与作战效能的需求。
一次作战中,常见的飞行任务有战前准备、起飞/爬升、巡航飞行、空中加油、对敌侦察、突防攻击和受击逃逸等等。根据不同飞行任务中对作战方案、性能计算、敌我态势以及飞行航路等功能的需求,面向上述延长作战半径与优化作战机群协同性的两类需求,可以分析得到各个飞行任务阶段所处任务环境以及IVMS需要实现的主要功能,汇总如表1所示。
对不同飞行任务下的需求整合,综合飞行器管理系统的基本功能主要分为以下5部分:
1) 态势感知与评估:实现对战场环境与目标的状态、属性的识别,依据目标及军事相关知识理解敌我作战部署、意图,获得态势优势估计,并对未来战场的变化趋势进行预测,为决策提供依据。
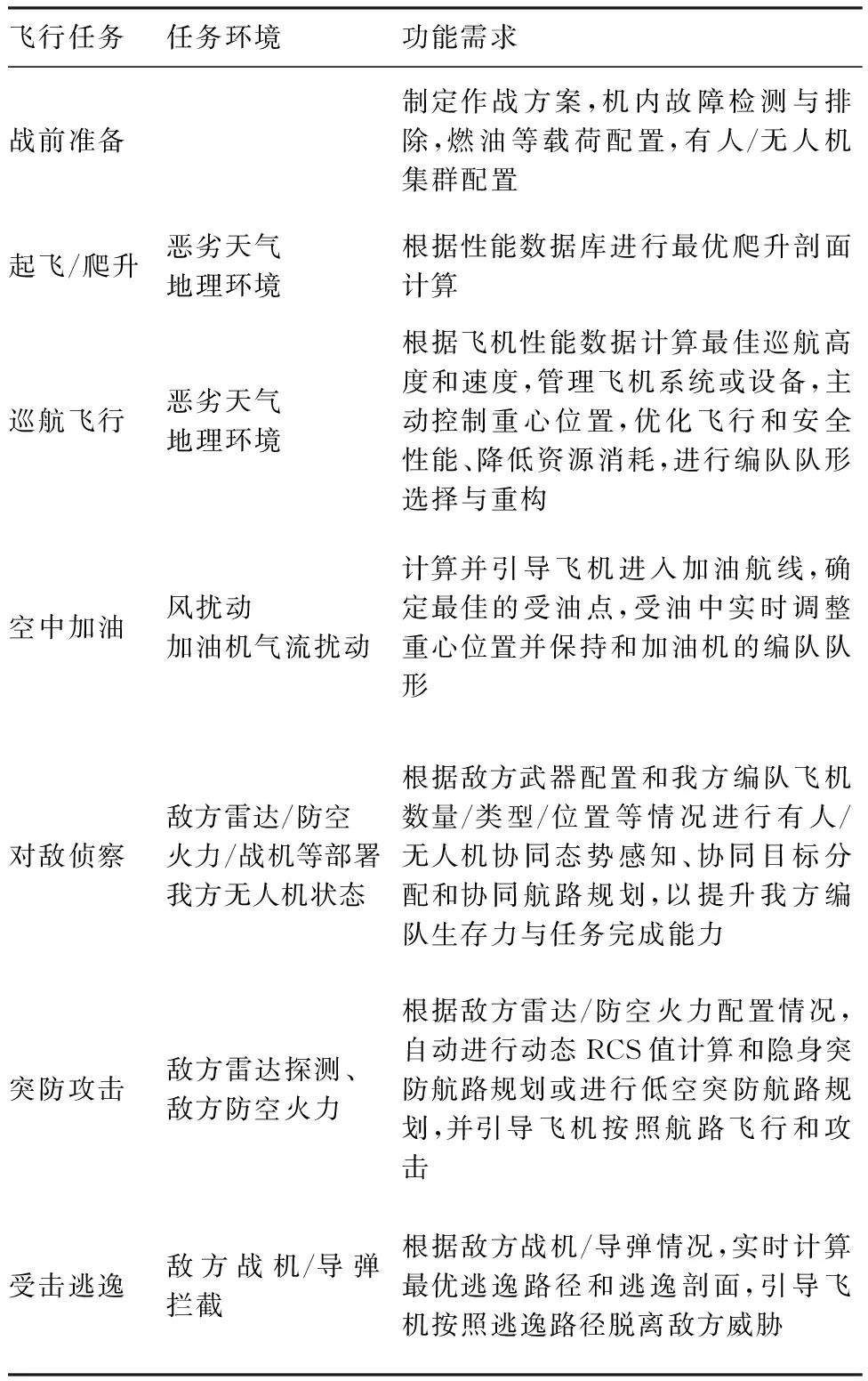
表1 IVMS功能需求Table 1 Function requirements of IVMS
2) 任务管理:在态势评估的基础上,根据作战准则,综合考虑包括机群性能、任务时间、战场环境等约束,完成任务分配与调度,规划有人/无人机协同作战航迹并进行飞行导引。
3) 飞行控制综合:针对任务需求,综合飞行控制、火力控制及推力控制,实现飞行性能优化,推进系统稳定控制和自动武器投放轨迹与攻击占位控制。
4) 公共管理:为了实现远程作战,公共管理功能通过对发动机与燃油系统、机电系统以及液压系统的能量合理分配,减少资源消耗,并通过主动重心控制,调节飞机燃油分布,降低巡航阻力,增加作战半径。
5) 智能人机交互:通过智能人机交互功能,获取飞行员操作指令,为飞行员综合显示作战模式、参数以及操作提示等。
2 基于数据交互的IVMS逻辑架构
目前提出的综合飞行器管理系统,主要研究如何对一架作战飞机的机载系统和作战任务进行管理。面对不确定、多任务、高威胁的现代强对抗战争,有人/无人机协同作战可以相互补充,提高执行复杂任务时灵活性与生存力。因此,本文在传统IVMS基础上,以延长作战半径与优化作战机群协同性为目标,将有人机与无人机的“资源”综合为一体考虑,以无人机为保护、支援和态势感知,以有人机为核心进行整体决策,设计了一种以数据交互为逻辑关系的IVMS架构。
2.1 系统总体架构
根据第1节提出的主要功能需求,可以将IVMS划分为公共管理(综合能量管理、主动重心控制、控制综合)、任务管理(效能评估、突防规划)、有人/无人机协同规划(任务分配、航迹规划、编队控制)、权衡与决策、管理信息交互等模块。
将各功能之间的数据交互作为逻辑关系,提出一种IVMS系统架构,总体结构如图1所示。其中,场景信息部分如图2所示。
该IVMS设置于作战机群中有人机内部,各无人机与加油机的飞行状态和探测/武器系统状态信息,以数据链形式与有人机进行通讯。本文将有人机数据和无人机/加油机数据分列,并根据数据来源,将IVMS按功能整合。
2.2 主要功能的数据交互
1) 综合能量管理、主动重心控制以及控制综合构成公共管理:其权衡与优化的目标是增加作战半径,提高飞机作战安全性。综合能量管理功能根据输入的部分飞机状态(飞行速度、飞行高度、迎角与侧滑角、舵面偏转角、油门开度)、决策的工作模式和飞机故障状态,将飞机的热管理系统、电力管理系统、燃油管理系统进行功能综合,优化飞机内部能源调度,避免能源浪费并解决飞机高产热、高用电带来的安全问题,输出满足当前最大散热能力的飞行高度、速度限制,并对用电设备工作状态加以控制。主动重心控制功能根据输入的飞机弹药和燃油分布、部分飞机状态(飞行速度、三轴角速率、迎角与侧滑角、舵面偏转角、姿态角)以及离线飞行包线数据库,输出估计的飞机当前重心位置、重心调整范围、当前最优重心位置以及为达到该位置对燃油的配置。控制综合功能根据输入的作战目标,从飞行性能、武器投放和攻击占位3个角度,计算飞机的性能包线输出至权衡与决策功能用于决策战术任务。同时计算飞行/火力/推力综合控制指令,实现有人机的综合飞行控制。


图2 场景信息部分Fig.2 Scene information part
2) 任务管理:其权衡与优化的目标是在当前飞行性能和任务的约束性,提升作战过程中飞机的生存力、作战效能。效能评估根据输入的性能约束和决策的作战任务,计算飞机当前状态生存力与作战效能,并将结果传输给突防部分作为约束。突防规划功能根据输入的部分飞机状态(飞机位置、飞行高度、飞行速度、姿态角)、性能约束、敌方部署的雷达及其他防空设施信息,通过航程与隐身效果收益分析,决策突防形式,输出飞机的动态RCS曲线、规划的航迹与姿态信息及各航迹点上的被探测概率。
3) 协同规划:通过协调有人/无人机机群,满足更高的任务需求,提高作战任务完成能力。包括协同任务分配与动态编队航迹规划。任务分配功能根据输入的我方有人/无人机状态信息、静/动态的作战目标/威胁/障碍位置、类型与运动信息,实现在战前准备的集群配置、作战任务过程中的动态任务目标分配。根据分配的任务与目标,编队航迹功能首先进行编队队形选择/重构,其次规划编队的攻击/逃逸路径以及根据航程与燃油余量制定加油计划。仅战前输出集群配置结果,之后输出各无人机时敏任务序列、各无人机编队位置姿态、以及有人机和无人机各阶段规划的四维航迹。
4) 能力权衡与决策功能:① 根据传感器系统获得战场态势信息,综合评估与预测战场态势变化、为任务管理提供依据,② 根据飞机各子系统状态,计算飞机性能,选定公共管理部分的工作模式并为任务管理提供约束,并在该两点的基础上,综合决策作战机群的阶段任务如急需空中加油、受击损伤返航、快速突防打击等等。
5) 管理信息交互功能:该功能是在能力权衡与决策部分接收整合其他功能状态信息的基础上,进行信息的筛选与整合,使飞行员可以更清楚快速的了解飞行状态、攻击模式、和操纵提示等信息。同时驾驶员还可以通过该功能设置系统的工作模式与方案。
2.3 面向有人/无人机协同远程作战的IVMS对比分析
从飞控系统、综合飞行/推进控制、战术飞行管理、发展到飞行器管理系统,逐步形成了目前的考虑安全性、生存性和操纵性的综合飞行器管理系统(IVMS)。本文在此基础上,将协同作战的有人机和无人机的性能与资源整体考虑,进一步扩展IVMS的管理范围,提升飞行性能与作战效能。
1) 功能优化
在传统IVMS考虑传感器感知、任务决策、飞行/火力/推力综合控制的基础上,本架构设计飞机综合管理离线性能数据库,包括能量资源调配方案,重心位置与性能剖面,积分航程表等,为在线快速决策提供数据准备。并在以下两方面优化IVMS功能:① 借鉴大型飞机,引入了主动重心控制功能,对巡航阶段重心位置进行权衡优化,并结合综合能量管理和考虑加油机编队进行加油计划制定与导引,最大化利用机载/加油机燃油、热能和电能,延长飞机航程。② 综合协同作战无人机资源调度功能。将无人机配备的探测感知系统,武器系统等和有人机性能共同作为决策依据,使得任务决策时可调度资源更多,作战半径更大,生存能力更强。
2) 飞行性能优化
本文提出的IVMS在提升飞机飞行性能方面,主要针对起飞、爬升、巡航的到达作战区域边界前的飞行阶段。该阶段优化的主要目的是通过有人机及其编队的机载资源配置以及空中加油计划的制定使飞机在巡航终点的任务载荷满足作战阶段的任务要求,即到达敌方势力范围前缘时载有更多的燃油载荷及弹药载荷,同时尽可能降低整个过程中的燃油成本。
第一,起飞前的配置优化:根据飞机最大起飞重量,燃油、弹药载荷能力同时结合任务需求优化配置初始燃油与武器资源,相较于传统VMS,由于配置过程考虑作战路径、战场环境与目标和协同无人机性能,快速生成配置方案,从而获得更符合实际作战的资源配置结果。
第二,起飞爬升的性能优化:结合起飞机场约束、机载资源以及协同无人机的配置,综合权衡,设计符合任务需求的有人/无人机四维起飞爬升剖面。
第三,燃油资源优化:在分析各阶段燃油消耗特性的基础上,更新优化飞机管理系统数据库,计算飞机剩余燃油载荷以及燃油需求,根据作战编队的燃油需求和加油机编队的供油能力调整重心位置,切换机载系统能源消耗状态,同时制定空中加油计划,优化整个机群燃油资源调度。
3) 作战效能优化
协同作战效能可以根据其执行作战任务的过程,分为信息获取、协同决策和协同打击。在该3个过程中,本文所提IVMS在如下方面有所优化。
第一,信息获取:综合考虑协同的无人机的机载系统与能力,通过战术决策与协同任务分配功能,指定无人机完成预警、探测、跟踪等任务,可以使有人机在相同的生存率条件下,扩大预警探测范围,更近更准确的跟踪打击目标,提高目标容量;或可规划有人机远离高威胁区域,由无人机提前获取战场威胁,使有人机获得更高的生存力,避免战损。
第二,协同决策:在进行战术任务决策时,首先,无人机通过自身机载系统,感知与解算战场态势,实现态势共享,为决策带来更高的完整性、时效性、准确性。其次,IVMS直接整合无人机获取的信息与有人机自身资源决策出整个作战机群任务链,相较于传统飞机管理系统可减少飞行员需决策的信息量,提高决策效率,降低压力。此外,机内能量管理、重心控制及飞/火/推综合与协同决策相互反馈,后者在前者的约束下规划任务,同时前者也可根据后者的需求调整机内资源拓宽性能范围,以获得更高的任务成功率,和规避威胁。
第三,协同打击/逃逸:协同打击/逃逸过程中,有人机的机动能力远小于无人机。在突防打击过程中,IVMS可以同时规划无人机任务,将无人机作为有人机的武库机完成识别与打击防空威胁的任务。通过调整机上资源消耗、重心位置以及飞行/推力综合控制,提高有人机机动性能,减少对突防规划的约束,从而获得更优的隐身/低空突防路径。以无人机充当防空武器诱饵,IVMS规划无人机路径,在逃逸与规避过程中为有人机护卫。在有人机已经损伤/故障情况下,调整机上能源消耗模式,或整合无人机信息,替代故障系统(如导航系统)保证飞行安全。
3 基于分层模式的IVMS软件系统架构
改进的IVMS因其功能需求的增加,使得软件的设计过程更为复杂。一个清晰、可扩展、高效的软件架构将有利于更好地针对作战需求对系统进行开发、改进与使用。
分层模式的架构是目前最为流行,应用最为广泛的架构设计方法之一。它将系统划分为若干层次,每一层解决问题的一部分,通过各层的协作提供整体的解决方案。由于问题得到分解,因此分层架构具有良好的可扩展性且易于维护。
针对IVMS功能多、交互关系复杂、面向不同飞机和作战场景时需要扩展内容等特点,提出了一种基于分层模式的IVMS软件系统架构。
3.1 系统总体软件架构
结合IVMS各功能之间逻辑交互关系,提出其软件体系结构如图3所示,分为交互层,决策层,规划层,模型层以及数据库层。该结构中由下至上,数据库层保存IVMS所需离线数据;模型层实现对作战集群和作战场景的建模,并由飞机状态和战场态势变化驱动;规划层实现突防规划、编队控制、能量管理、主动重心控制、性能计算等主要功能决策层实现综合能力权衡与决策;交互层主要实现与飞行员的信息交互,包括用户设置接口,与决策结果显示。

图3 基于数据交互的IVMS系统架构Fig.3 IVMS system architecture based on data interaction
3.2 各层次分析
1) 数据库层
数据库层主要包括飞机性能数据、战场环境数据、飞机基本数据3个部分,是飞行器进行在线规划与管理的离线数据基础,其结构如图4所示。
飞机基本数据部分主要包括有人机和无人机的:① 飞机结构数据:飞机的展弦比、机翼展长,机翼面积、发动机安装角、操纵面位置等;② 飞机气动数据:完整的飞机气动力系数、导数、转动惯量、舵效等;③ 发动机与燃油系统结构数据:应包含油箱结构参数与位置,燃油传输流量,发动机耗油率等;④ 飞机相关设备数据:应包含集群作战全部飞机的武器、雷达及其他相关设备的数量、重量、位置、成本、射程等参数;⑤ 有人机的主要机电模型:包括综合热管理、电能管理、液压能管理所需的飞机系统数据;⑥ 有人机的RCS曲线。
飞机性能数据部分主要包括有人机和无人机的:① 平飞推力数据:不同飞行高度、速度条件下平飞的发动机最大推力;② 发动机性能数据;③ 爬 升性能数据:某重量下不同高度、速度的最大爬升梯度/爬升率;④ 最优巡航性能数据;⑤ 不 同重心、重量下飞行包线数据。同时为了实现能量管理功能,还需构建能量管理预选数据。
战场环境模型数据部分主要包括:① 战场任务空间;② 数字高程地图数据;③ 敌防空威胁模型:对防空雷达、导弹、拦截战机等建模;④ 雷达组网探测模型;⑤ 机场环境;⑥ 典型气象模型;⑦ 作战目标信息数据。
2) 模型层
模型层是为了实现IVMS在线进行任务、路径等规划功能,根据获取的战场态势信息,对战场环境、威胁,以及根据集群中每架飞机状态信息建立数学模型。
3) 规划层
规划层是实现IVMS对飞机性能优化与权衡最重要的部分,它可以并行实现突防决策与规划、有人/无人机编队规划与控制、飞机主动重心控制、机上综合能量管理以及考虑故障与损伤的飞机性能在线计算功能。其中,飞机性能在线计算得到的修正性能如飞行包线等,将传输给其他功能作为规划的约束条件。图5和图6分别为以突防决策与规划功能和有人/无人机协同规划功能为例所构建的软件架构。突防决策与规划过程,在激活指令下,根据性能约束、战场威胁及飞机当前位置姿态,调用规划约束函数,基于代价函数与数字地图分别计算低空突防与隐身突防模式下的突防路径,并根据突防收益函数计算结果决策突防模式,最后对确定的航迹平滑处理。

图4 数据库层软件架构Fig.4 Database layer software architecture
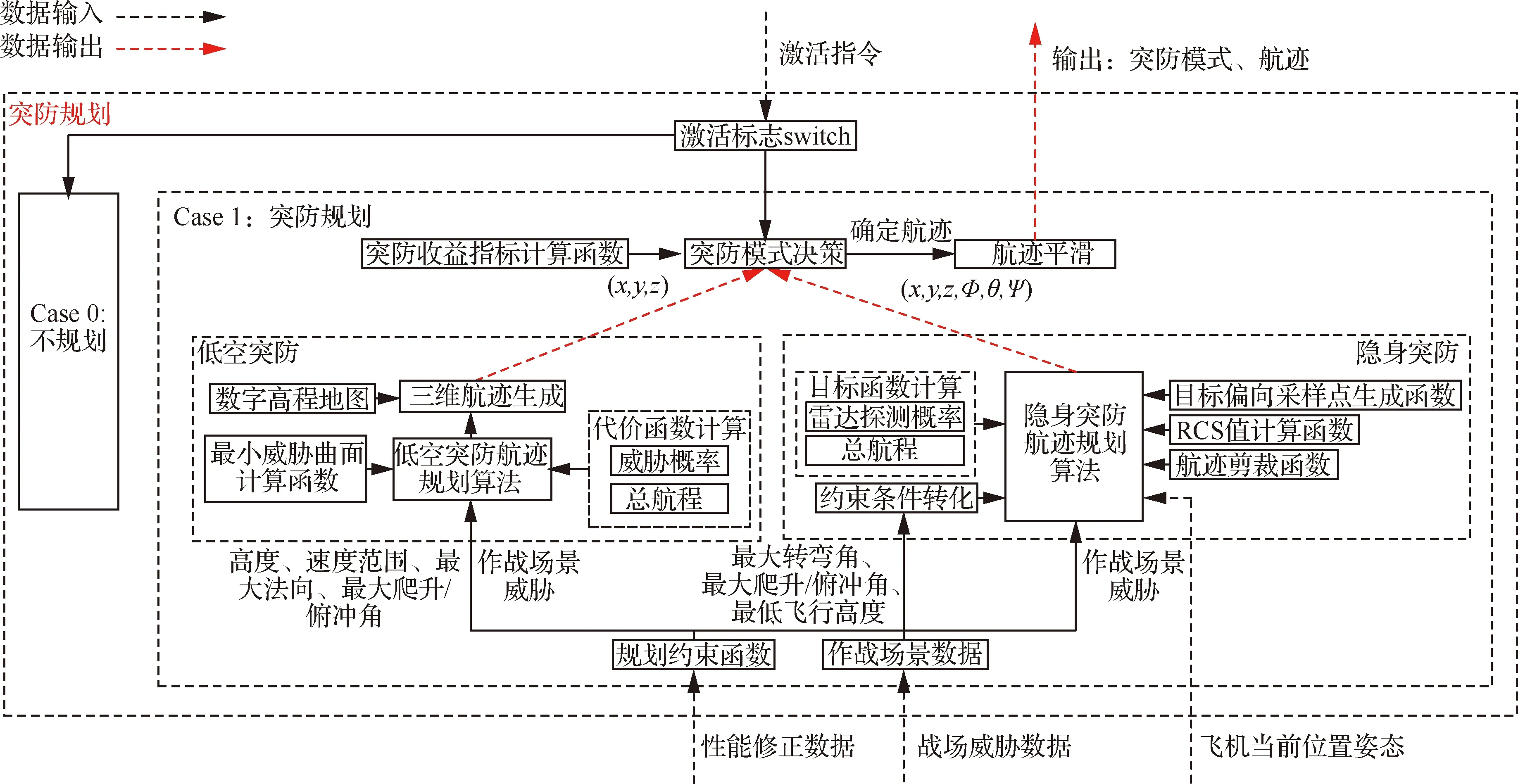
图5 突防规划软件架构Fig.5 Penetration planning software architecture
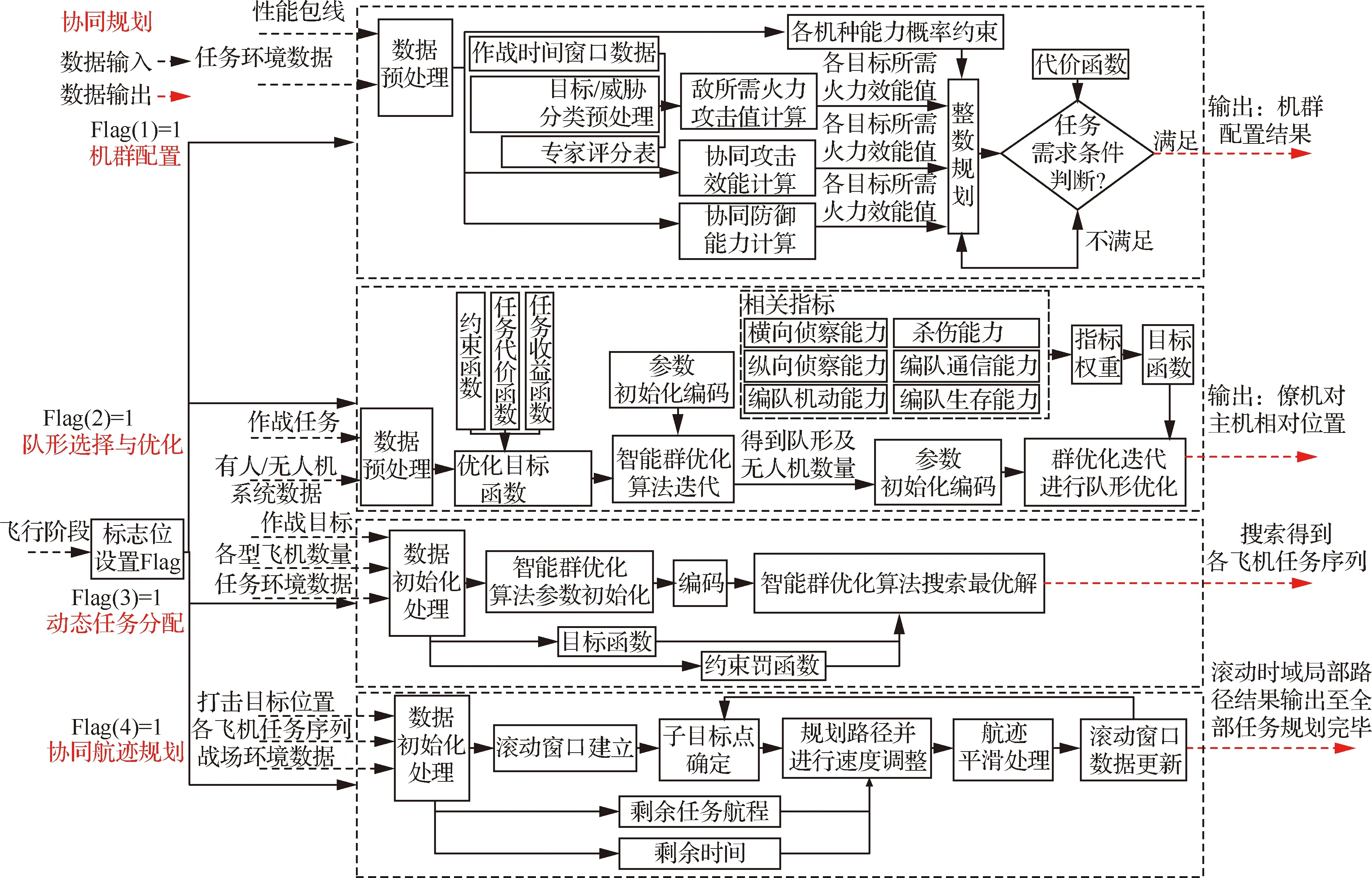
图6 协同规划软件架构Fig.6 Collaborative planning software architecture
有人/无人机协同规划功能,包括机群配置、队形选择与优化、动态任务分配和协同航迹规划4个功能。根据飞机节点不同,激活的功能不同,飞行阶段与激活标志位对应关系如表2所示,标志位为0代表不激活该功能。
4) 决策层
在整个作战过程中,不同任务阶段对IVMS的功能有不同的需要,因此,设计实现综合能力权

表2 协同规划功能激活标志位Table 2 Function activation flag of collaborative planning
衡的决策层可以根据飞行阶段与战场态势,决策阶段任务、作战目标并对主要功能工作与否进行调度,减少同一时间计算量,优化IVMS计算速度。决策层软件架构如图7所示。
5) 交互层
交互层是实现IVMS系统与飞机驾驶员的人机交互功能。用户输入可以通过按钮/语音等形式设置结果显示窗口的信息内容如:应飞航迹、战场态势图、机内载荷情况、编队飞机位置与状态等。
4 结 论
现代信息化战争条件下,对战机以及作战机群的巡航、探测、突防、打击等能力提出了更高更综合的要求,IVMS作为一种对战机物理和功能进行综合系统,可以有效提高战机作战效能,减轻飞行员负担。
本文基于作战飞行任务分析了IVMS系统的功能,并在此基础上提出了面向有人/无人机协同远程作战场景的IVMS,并设计了基于数据交互的逻辑架构和基于分层模式的软件架构,为进一步对IVMS仿真分析和硬件设计提供了参考。

图7 决策层软件架构Fig.7 Decision-making layer software architecture
