基于集员估计的卫星飞轮故障检测与预测方法
2022-04-26梁寒玉张文瀚王振华沈毅
梁寒玉,张文瀚,王振华,*,沈毅
1.北京控制工程研究所,北京 100190 2.哈尔滨工业大学 航天学院,哈尔滨 150001
飞轮是卫星姿态控制系统的关键执行部件之一。虽然卫星飞轮具有较高的设计可靠性,但是由于其长期运行在恶劣的空间环境中,故障是无法完全避免的。卫星飞轮的故障可能会引起姿态控制性能下降,甚至会影响卫星的正常运行。因此,对飞轮的故障进行及时有效的诊断和处理,对于卫星的安全稳定运行具有重要意义。
航天器控制系统的故障诊断与容错控制技术得到了国内外研究者的广泛关注。在卫星飞轮故障诊断方面,文献[6]针对卫星动量轮闭环系统提出了一种基于未知输入观测器的飞轮故障隔离方法;文献[7]提出了一种利用扩展卡尔曼滤波技术的卫星飞轮故障检测方法;文献[8]基于历史观测数据建立了飞轮的高斯混合模型,采用贝叶斯后验概率方法研究了卫星飞轮的故障诊断方法;文献[9]中提出了一种基于偏差分离原理和两阶段卡尔曼滤波的卫星反作用飞轮故障诊断方法,并利用半实物仿真平台进行了验证;文献[10]提出了一种基于两阶段扩展卡尔曼滤波的卫星飞轮故障估计方法。目前文献中的大部分结果集中在卫星飞轮的故障诊断方面,在卫星飞轮故障预测方面的研究相对较少。文献[11]针对卫星姿态控制系统的故障预测问题,提出了一种结合模糊基函数网络与自回归模型的故障预测方法,但是该方法需要使用大量卫星正常运行时的历史数据来训练模糊基函数网络,在一定程度上限制了其实用性。文献[12]基于卫星姿态控制系统的可重构性分析,利用Kaplan-Meier估计器和极大似然估计方法建立了系统故障的Petri网预测模型,并在此基础上实现了对卫星故障的预测和系统剩余使用寿命的估计。文献[13]通过使用指数模型来描述卫星反作用飞轮故障,提出了一种结合卡尔曼滤波和粒子滤波的飞轮故障预测方法,但是粒子退化现象会影响该方法的性能。
基于退化模型的故障预测方法的性能通常依赖于退化模型的精度。对于卫星飞轮这样的在轨运行器件,通过地面试验的方式可以得到其退化模型的形式,但是很难准确地确定出每个飞轮个体退化模型中的参数。因此,如何在轨估计出飞轮退化模型中的未知参数,对于飞轮的故障预测是至关重要的。但是,在对飞轮退化模型中的参数进行在轨估计时,需要考虑模型或者测量偏差,这就需要研究鲁棒估计方法。现有的鲁棒估计方法,卡尔曼滤波和估计是最常用的2种方法。在卡尔曼滤波中,通常需要假设偏差的概率分布是已知的;在估计中,需要假设偏差的能量是有界的。但实际上,实际系统中的偏差通常是未知但有界的。集员估计方法可以处理未知但有界不确定性条件下的估计问题,近年来得到了很多学者的重视,尤其是在故障诊断方面,集员估计技术得到了越来越多的应用。与故障诊断相比,集员估计技术在故障预测方面缺乏相关研究。基于上述讨论,本文提出了一种基于中心对称多面体的集员估计方法,可以实现对飞轮故障的检测和预测。本文还利用数值仿真对提出的方法进行了验证,仿真结果表明所提出的方法可以实现对飞轮故障的早期检测和提前预警,具有较好的可靠性和有效性。
1 卫星飞轮动态模型
飞轮转速精度是影响飞轮输出力矩精度的主要因素,因而采用转速反馈进行速率控制是最直接有效的方法。根据相关文献[22-23]和实际工程经验可得到如图1所示的飞轮闭环系统的方框图。

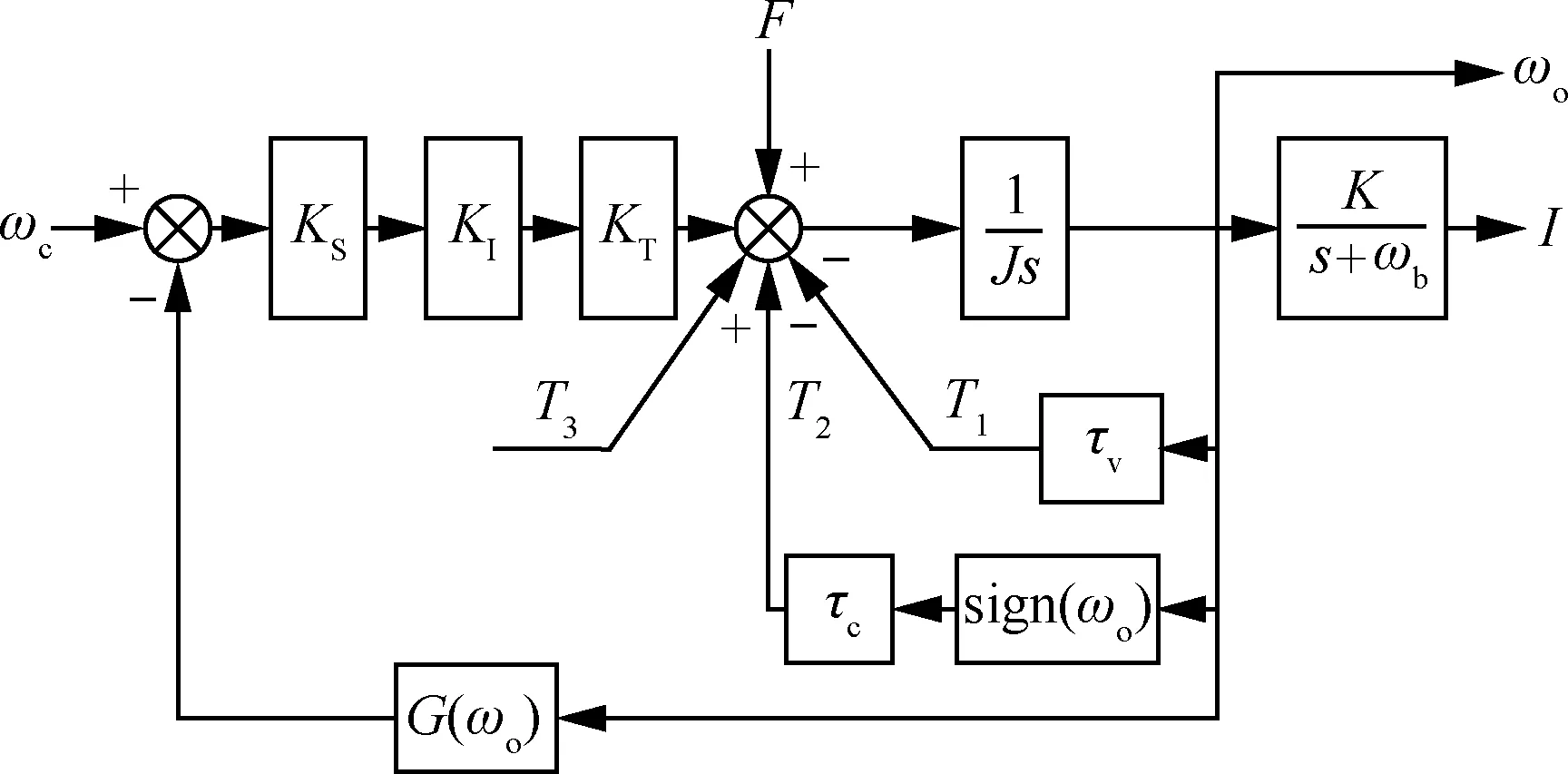
图1 飞轮闭环系统方框图Fig.1 Block diagram of flywheel closed-loop system
(1)

针对图1中的飞轮闭环系统,可得到如下形式的传递函数:

(2)

(3)

(4)
式中:=+sign()。式(2)为飞轮电机电流和实际输出转速之间的传递函数;式(3)为飞轮模型只受力矩噪声影响时的传递函数;式(4)为飞轮模型只受转速指令控制时的传递函数。根据式(2)~式(4),可得到如下的连续时间模型:

(5)

(6)

(7)

根据实际工程经验可知,飞轮中的黏性摩擦系数、库仑摩擦系数和力矩噪声角偏差无法准确确定,故和3,均为未知的。因此,将式(6)和式(7)中的未知项处理为不确定性干扰,具体形式为

(8)

(9)
式中:



然后,选择采样时间,则利用欧拉一步离散法则可将式(9)转换为如下离散时间系统:

(10)

本文的目的是利用飞轮闭环系统动态模型设计一种故障预测方法,在飞轮故障造成重大影响前及时给出有效的预警信号,保证飞轮系统的安全性。本文的故障预测方法主要针对的是性能已经发生退化的飞轮对象,且是在性能退化被检测到之后才开始使用,并不直接应用于无故障的飞轮对象中。因此,在飞轮应用故障预测方法之前,需要先对其进行故障检测,在检测到飞轮性能故障后才开始使用故障预测技术。
2 基于集员状态估计的故障检测方法
基于飞轮闭环系统动态模型,本文提出了一种基于集员估计的故障检测方法。首先,利用中心对称多面体的传播与交集性质来估计模型中的系统状态;然后,基于估计的系统状态和实际输出生成残差,再结合阈值来实现飞轮故障检测。
2.1 中心对称多面体的定义与性质
在设计基于集员估计的故障检测方法前,首先介绍一些关于中心对称多面体的定义和性质。
一个维空间中的阶中心对称多面体Z⊂(≤)是超立方体=[-1,1]的仿射变换,即
Z={∈:=+,∈}
(11)
式中:∈和∈×分别为中心对称多面体的中心和形状矩阵。

(12)
式中:⊕表示闵可夫斯基和符号。
(13)
式中:∈×为给定的矩阵。
2.2 基于中心对称多面体的集员状态估计


(14)





为了实现基于中心对称多面体的集员状态估计,本文提出如下的定理。


(15)

(16)

(17)

(18)

(19)




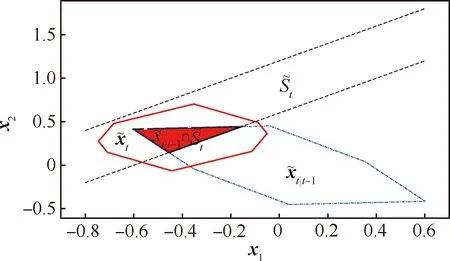
图2 基于中心对称多面体的集员状态估计Fig.2 Zonotope-based state set-membership estimation



根据性质1和性质2可以得到


则可得证等式(15)和式(16)。





则可得到如下等式:

(20)













(21)






(22)










基于定理1中的集员状态估计算法,本文给出如下形式的残差生成公式:
(23)





(24)
考虑到直接判断残差和中心对称多面体R的包含关系十分复杂,本文选择先计算包含中心对称多面体R的区间盒子,然后判断残差是否被区间盒子包含来检测故障。根据文献[15],可以得到如下的中心对称多面体区间求取公式:
(25)

在得到中心对称多面体R的区间盒子后,可以得到如下的故障检测逻辑:
(26)
为了保证检测的可靠性,需要在某一时间段内存在多个时刻的残差超出R的区间盒子,才可以判定飞轮故障,此时切入故障预测模式;反之,则说明飞轮工作正常。故障检测中的时间段长度和超出的时刻个数可依据实际工程经验选取。
3 基于集员参数估计的故障预测方法
在利用第2节中的方法检测出飞轮出现了故障且性能正在退化后,本节提出了一种故障预测方法,在飞轮故障造成重大影响前及时给出有效的预警信号,保证飞轮系统的安全性和可靠性。
3.1 飞轮电流退化模型构建
根据地面仿真和历史数据分析可知,飞轮电流的大小可以作为反映其健康状态的重要指标。所以本文采用飞轮的电流作为故障特征信号并由此来实现对飞轮的故障预测和预警。在飞轮故障预测方法中,考虑到飞轮瞬时电流数据的参考价值有限,本文采取卫星与运行周期相关的一段时间内的电流均值作为特征参数:

(27)
式中:为当前的特征信号;为第个时刻的电流大小;为计算特征信号所用的时间长度。
虽然可以作为反映飞轮性能的征兆信号,但是由于存在测量噪声等不确定性,会导致与真实的健康指标有一定的偏差,即
=+
(28)
式中:为准确反映飞轮性能退化的参数;为实测值和准确值之间的偏差。
如果能够准确地描述特征参数的演化规律,则可对其未来的趋势进行预测,结合一定的阈值即可实现对飞轮故障的提前预警。结合地面测试和试验经验,可采用如下4种线性或非线性退化模型来描述的演化规律:
=+
(29)
=exp(+)
(30)
=exp(-)
(31)

(32)
式中:和为退化模型中的未知参数。
虽然可以通过地面测试与试验确定出与卫星飞轮电流数据相关的退化模型的形式,但是,考虑到飞轮的个体差异和实际运行情况,模型中的参数和的值是无法事先确定的。这就需要根据的值,结合式(29)~式(32)中的模型,对和的值进行在轨估计。在得到参数和的估计值后,再采用式(29)~式(32)中的退化模型对将来时刻的飞轮健康状况进行预测。
上述4种模型中,式(29)中线性模型的参数估计较为方便,但式(30)~式(32)中的非线性模型则会为参数估计带来不便,为此需要对其进行线性化处理。下面介绍模型2到4的处理方法。
对式(30)两边同时取对数可得
ln()=+
(33)
对式(31)两边同时取对数可得
ln()=-
(34)
对式(32)两边同时取对数可得
ln()=ln()+ln()
(35)
对于式(28)中的偏差,模型2到4在两边取对数后均可将其处理为
ln()=ln(+)=ln()+
(36)
式中:表示ln()和ln()之间的偏差。
从式(28)、式(29)和式(33)~式(35)可以看出,经过上述取对数处理后,4种退化模型具有如下相同形式的线性动态方程:
=++
(37)
式中:式(37)中各参数的具体形式与模型类型相关,参数选取方式为
=,=,=,=
=ln(),=,=,==-,=ln(),=
=,=
=ln(),=,=ln()=ln()
基于飞轮电流特征数据和4种退化模型统一后的动态方程,本文提出了一种基于集员参数估计的故障预测方法。首先,利用中心对称多面体的传播与交集性质来估计模型中的未知参数,然后基于估计的参数来对飞轮电流数据进行预测,再结合预测值和阈值来实现飞轮故障预警。
3.2 基于中心对称多面体的集员参数估计
虽然前述内容确定出了飞轮4种退化模型统一后的动态方程,但是其模型参数和是未知的,故为了实现对飞轮电流值的预测,需先对模型参数和进行估计进而得到飞轮电流的预测值。考虑到在飞轮电流的演变过程中,模型参数和的变化是十分缓慢的,故可以采用如下的模型描述参数和的变化过程:
(38)
式中:1,和2,为模型参数和变化过程受到的扰动;1,和2,通常是未知但有界的。
基于飞轮退化模型统一后的动态方程(37)和参数变化过程(38)则可得如下的估计问题:
(39)

(40)
式中:为每种退化模型下各自实测值和准确值之间的偏差,且是未知但有界的。由此,本文建立了飞轮退化模型参数的估计问题。
虽然无法确定出参数和的值,但通过地面测试与试验可估计出系统(40)状态初值、扰动和噪声的上下边界。由此可得到如下的未知但有界条件:

(41)

根据定义1,可将未知有界(41)假设转换为如下的中心对称多面体形式:

为了实现基于中心对称多面体的集员参数估计,本文提出如下的定理。

|-1=[-1]
(42)

(43)

(44)

(45)

定理2的证明过程同定理1,此处不再重复证明。同时,注1中的降阶方法在定理2中同样适用,有助于降低集员参数估计的计算量。
3.3 飞轮故障预测策略
本节将对飞轮未来时刻的电流数据进行预测,再结合预测值和设置的阈值来实现飞轮故障预警。假设现在共有+1个飞轮电流特征数据,期望每个时刻往后预测的电流特征个数为。

当采用式(29)中的退化模型1时,采用式(46)来对未来时刻的飞轮电流值进行预测:

(46)

当采用式(30)中的退化模型2时,则采用式(47) 来对未来时刻的飞轮电流值进行预测

(47)
当采用式(31)中的退化模型3时,则采用式(48) 来对未来时刻的飞轮电流值进行预测:

(48)
当采用式(32)中的退化模型4时,则采用式(49) 来对未来时刻的飞轮电流值进行预测:

(49)

1) 若对从1取到,都使得式(50)成立
(50)
则说明在时刻未预测到故障。
2) 若对从1取到,存在一个使得

(51)
则说明在时刻预测到了故障,预测的未来发生故障的时刻为+。
4 仿真结果
本节基于图1中的飞轮模型,利用数值仿真来验证本文方法的有效性,再将所提出的方法和两种现有的故障预测技术进行了对比,进一步验证了所提方法的优越性。仿真中,飞轮模型的各参数设置为:=2.5,=4,=0.095 N·m/A,=0.031 N·m·s,∈0.001×[-1,1] N·m,∈0.002×[-1,1] N·m,∈0.02×[-1,1] rad,=0.2 rad/s,=16 A·rad/V·s,=40 rad/s,=0.05 s,由此可以确定如下的离散时间系统(10)中的参数矩阵:




故障预测过程中,考虑到飞轮瞬时电流数据的参考价值有限,本文采取与运行周期相关的一段时间内的电流均值作为特征参数,通过对飞轮的电机电流数据进行式(27)中的处理可以得到如图5所示的模拟飞轮故障电流特征数据。
故障预测仿真中,采用退化模型1来描述电流特征数据的演化规律,具体仿真参数设置为

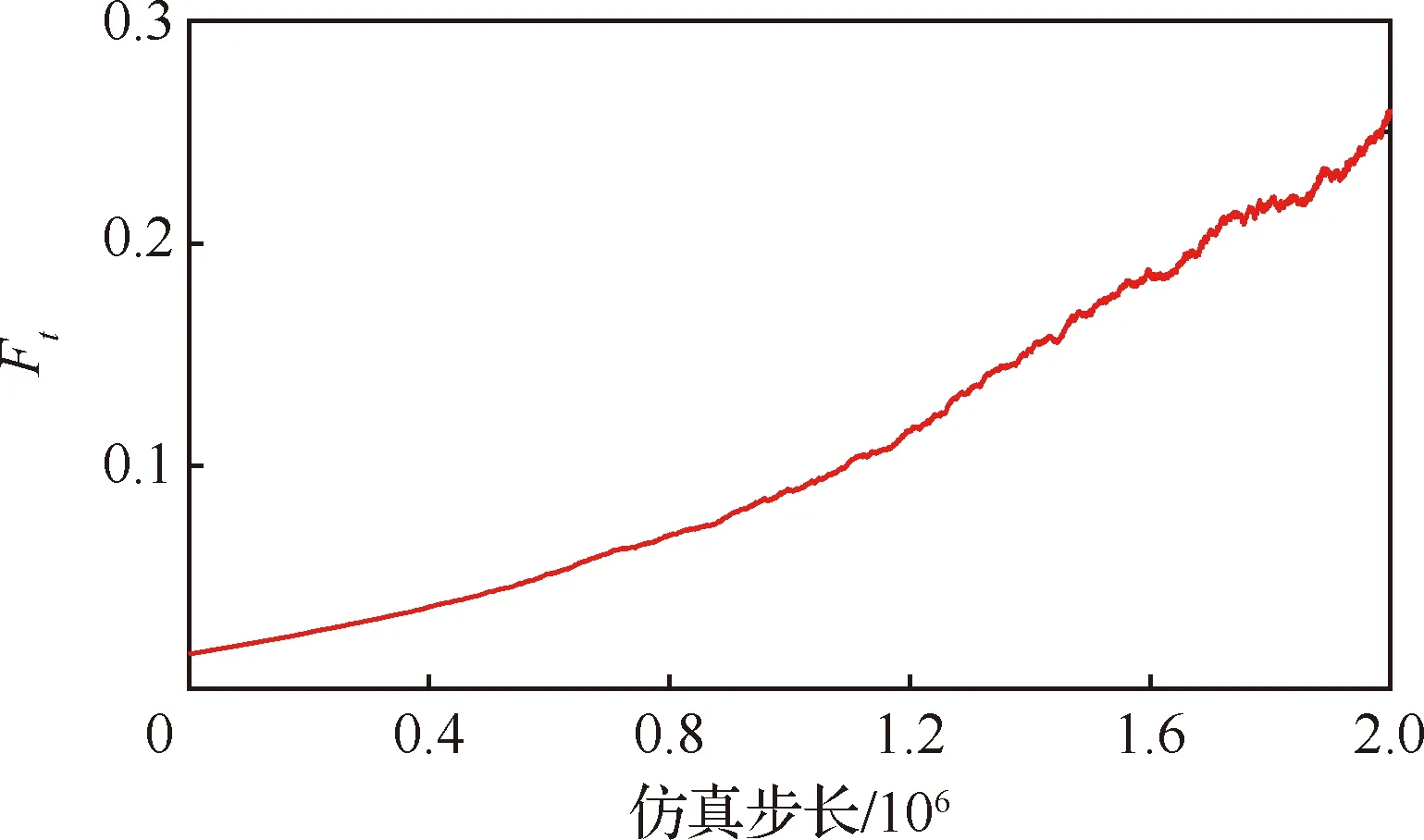
图3 飞轮故障数据Fig.3 Fault data of flywheel

图4 飞轮故障检测结果Fig.4 Flywheel fault detection results
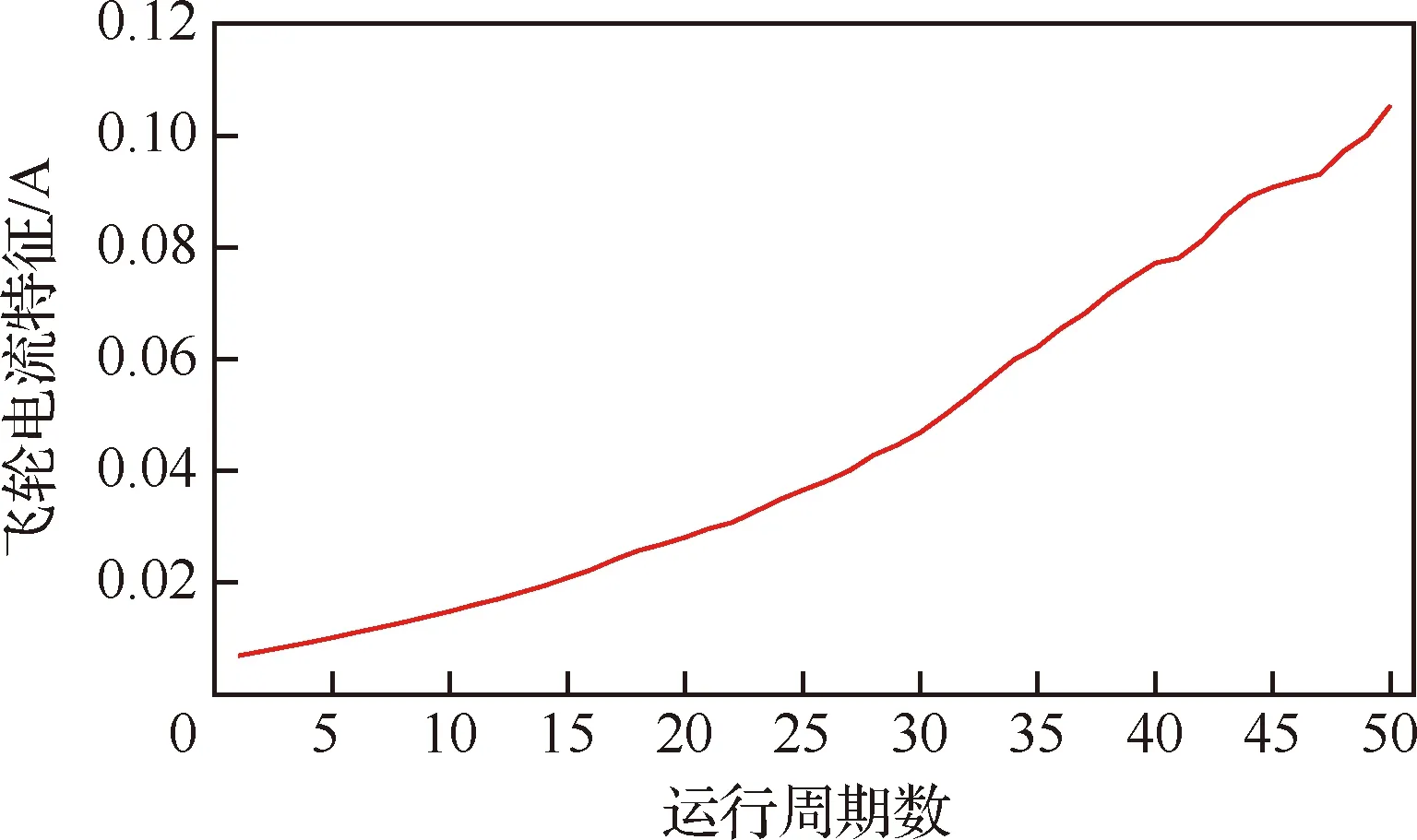
图5 飞轮电流特征数据Fig.5 Flywheel current characteristic data
为了验证方法的优越性,将所提出的方法与Predictive Maintenance Toolbox (PMT) 中的故障预测方法和基于灰色模型的预测方法进行对比。采用与上述相同的仿真参数,由此可得到如图7所示的故障预测对比仿真结果。
从图7中的结果可以看出,在=19,=27和=34时,本文方法给出的电流预测结果更接近于实际的电流特征数据信号,这表明本文方法能给出比灰色模型预测方法和PMT故障预测方法更准确的故障预测结果。
为了更清楚的说明本文方法给出的预测结果比基于灰色模型的预测方法和PMT中故障预测方法给出的结果更接近于实际电流特征信号,本文还给出了3种方法在=19,=27和=34时的预测误差对比结果。仿真中采用预测误差之和来进行对比,计算公式为



图6 电流数据的故障预测结果Fig.6 Fault prognosis results of current data
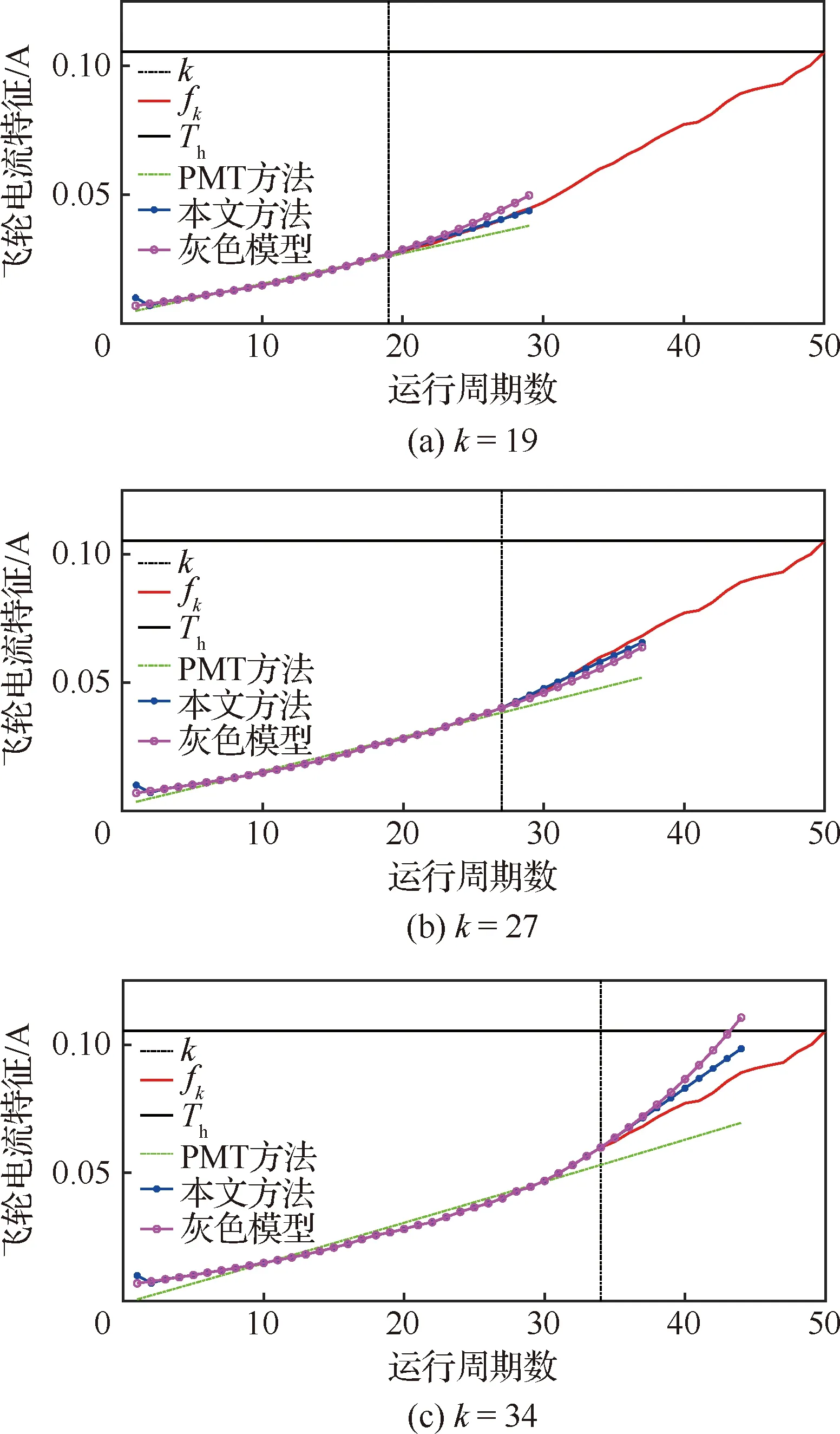
图7 故障预测性能对比结果Fig.7 Comparison results of fault prognosis performance
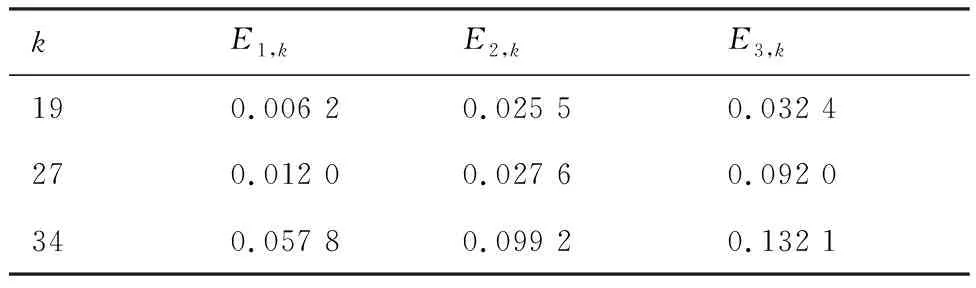
表1 故障预测误差对比结果Table 1 Comparison results of fault prognosis errors
5 结 论
本文提出了一种基于集员估计的卫星飞轮故障检测和预测方法。
1) 根据飞轮的动态特性和实际工程经验,构建了飞轮闭环系统的动态模型,并在此基础上设计了基于集员估计的故障检测方法。仿真结果表明,所设计的方法可以准确有效的检测出飞轮故障,检测性能良好。
2) 选用飞轮电流作为故障特征信号,构建了电流退化模型,并在此基础上设计了基于集员估计的故障预测方法。仿真结果表明,所设计的方法可以在故障特征信号超出阈值前给出预警信号,预警性能可靠。
3) 与现有的Predictive Maintenance Toolbox中的故障预测方法和灰色模型的预测方法相比,本文方法的预测结果更接近于实际信号,预测性能更好,体现了所设计方法的优越性。
