仿生鸟侦查飞行器研究
2022-04-24贾雅琪孔繁朋李晓丹
贾雅琪,孔繁朋,李晓丹,王 冰
(辽宁工业大学,辽宁 锦州 121001)
0 引言
不久的将来,低空领域会在国内开放,这无疑是小型飞行器一个难得的发展机遇。而仿生扑翼飞行器的研究则是小型飞行器相关研究中的一个热点[1]。
近几年,关于扑翼飞行器的研究和制作已经有了长足的进展[2]。仿生飞行器是区别于固定翼飞行器、旋转翼飞行器的另一类飞行器,其飞行原理来源于自然界中鸟类、昆虫的飞行方式。在过去很长一段时间内,人们更加认可固定翼飞行器与旋转翼飞行器。但目前看来,仿生翼飞行器在某些场合的使用中相较于固定翼飞行器与旋转翼飞行器具有明显的优势。例如在军用侦查使用中,固定翼飞行器、旋转翼飞行器的优点是飞行速度快,但不足之处是隐蔽性差;仿生翼飞行器不仅隐蔽性好,更是同时具有悬停、推进、举升等功能,具有较强的机动性[1]。
本文将在仿生学的基础上,利用扑翼系统来代替以往的喷气式发动机、旋转翼来为飞行器提供动力,并基于前人关于仿生飞行器的设计思路去设计一款仿生鸟,从仿生鸟的总体结构来看,只采用了一套扑翼系统,目的是在保证功能的前提下尽量减轻仿生鸟的重量,使之更加灵活可控。
1 仿生鸟侦查飞行器设计
1.1 对鸟类及仿生鸟飞行的分析
大部分鸟类在飞行过程中有一个共同的特点:翅膀和尾翼总是周期性地协同工作,即鸟类的飞行过程是由多个周期飞行动作所组成,而每个周期中的飞行动作又可分为翅膀下扑、翅膀合拢、翅膀上扑、翅膀平展4个阶段[3]。其中,翅膀下扑指的是一、二段翼共处于一个平面,自上向下扑动;翅膀合拢指的是一段翼保持原状态,二段翼向下折叠;翅膀上扑指的是一段翼向上扑动,二段翼保持原状态;翅膀平展指的是一段翼扑动至极限处,二段翼向上扑动至与一段翼共处同一平面。
由于翅膀下扑是飞行过程中产生升力的主要动作,因此翅膀下扑是飞行动作中的重要部分。通常情况下,一个飞行动作周期中的60%~80%时间是用于翅膀下扑,而主要作用是翅膀复位的上扑动作在时间上便有明显缩短[1]。
根据对鸟类飞行动作的分析可知,仿生鸟的动力来源是空气对飞行器的反作用力。从简单的飞艇入手分析,飞行器能够上升是由于空气对其竖直向上的推力大于自身的重力。飞行器若想前进,必须还得有一个水平的推力,这样飞行器才能完成基本的飞行。如固定翼飞行器,一般由喷气式发动机工作以提供水平方向上的推力,而流线型机翼在高速气流的作用下产生升力;再如直升飞机,由旋转翼高速旋转以提供升力,旋转翼与水平面的夹角产生的分力作为推力。因此,扑翼飞行器必须同时获得足够的空气对其在水平和竖直方向上的反作用力,即升力和推力,才能完成简单飞行。
1.2 仿生鸟侦查飞行器方案设计
结合鸟类飞行动作中的几个阶段以及对仿生鸟飞行过程中动力来源的分析,使用SolidWorks软件建立了仿生鸟的三维模型并进行了运动仿真,设计出一款飞行灵活、善于隐蔽,能够在多种特殊场合投放使用的仿生鸟侦查飞行器。
该仿生鸟侦查飞行器能够通过电机带动曲柄摇杆等机构来模仿鸟类飞行动作以完成基本的飞行,能通过控制舵机以控制机翼与尾翼和空气的接触面积来完成转向、俯仰等动作。由于侦查型仿生鸟对隐蔽性的要求高,因此,仅采用一套扑翼系统及相关部件完成飞行动作,4个舵机及相关部件完成转向、俯仰等动作,大大降低了仿生鸟的重量。
1.3 仿生鸟侦查飞行器结构设计
仿生鸟侦查飞行器主要由机身、机翼和尾翼等组成,如图1所示。
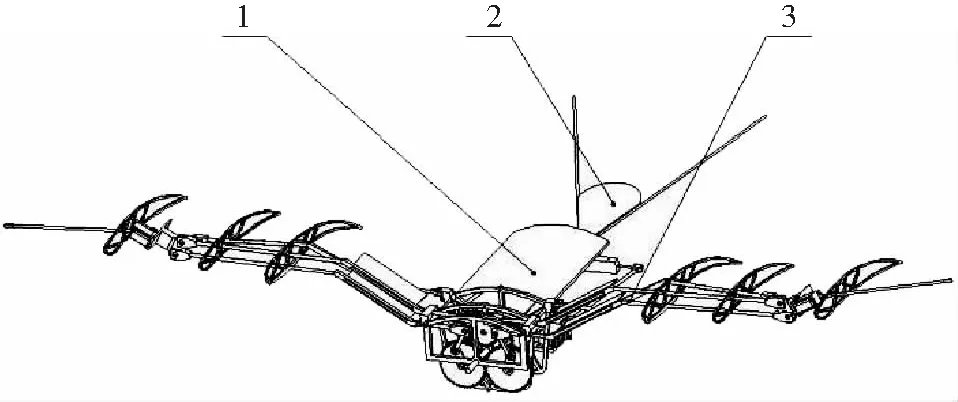
1—机身;2—尾翼;3—机翼。
1.3.1 扑翼机构的设计
扑翼机构采用平面曲柄复合双摇杆机构进行设计,如图2所示。

1—翼杆;2—齿轮组;3—曲柄复合双摇杆机构。
扑翼动作的实现过程涉及的部分为电机—齿轮—曲柄摇杆机构—扑翼,由电机产生动力带动齿轮,曲柄设计为与齿轮固连以带动摇杆及其相连的扑翼进行运动。曲柄滑块或凸轮弹簧等机构虽能产生仿生鸟所需的扑翼运动,但曲柄摇杆机构磨损较小、传动效率高[1]。根据对鸟类飞行机构的分析可知,驱动扑翼的传动部分需要具有某种急回特性,因此选择曲柄摇杆机构作为传动机构。为使飞行器在飞行过程中能够保持稳定,所设计的传动部分中心轴线对称,能够保证飞行过程中重心处于中心轴线上。
当仿生鸟侦查飞行器飞行时,电机转动,与电机连接的主动齿轮转动,主齿轮带动与之啮合的副齿轮和一对从动齿轮,通过一系列的传动比转换,获得最合适的速度与扭矩,从动齿轮上安装有曲柄,曲柄连接曲杆,组成曲柄双摇杆机构,从而控制机翼绕主关节扑动,提供飞行过程中所需的升力及推力[4]。
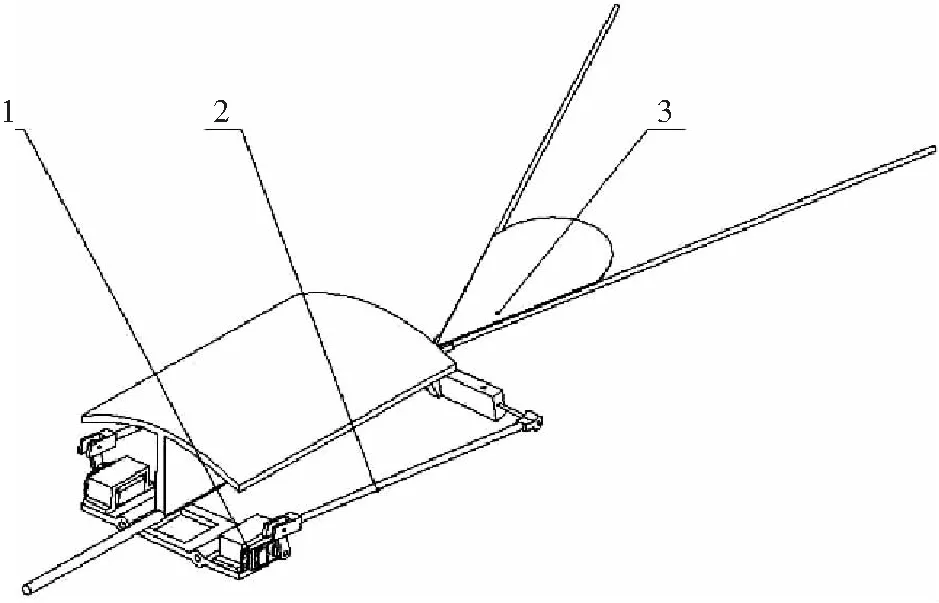
1.3.2 转向机构的设计
使用舵机去控制仿生鸟的机翼转向机构,如图3所示。

1—主机翼;2—舵机;3—翼杆。
尾翼转向机构采用舵机进行控制,如图4所示。
1—舵机;2—曲杆;3—尾梢。
在仿生鸟侦查飞行器转向过程中,通过舵机控制曲杆长短,来调节扑动幅度,机翼末端转向舵机与尾部转向舵机,推动转向杆,带动尾翼转动块转动角度,从而控制机翼、尾翼和空气的接触面积,达到仿鸟类转向与俯仰。
1.4 仿生鸟侦查飞行器蒙皮工艺
依据实验和计算出的结果,对比了使用刚性蒙皮的扑翼与使用柔性膜蒙皮的扑翼在下扑动作中产生的升力。根据对比发现,使用了柔性膜蒙皮的扑翼虽然在升力的产生方面与刚性蒙皮的扑翼区别不大,但柔性膜蒙皮的扑翼能够增大推力,即改善了扑翼飞行器的气动性能。
在蒙皮工艺方面,在仿生鸟侦查飞行器的主机翼与近主机翼及尾翼上贴上复合薄膜,模拟羽毛和柔性翼结构,且重量轻,与空气接触面积大,使推重比增大,更容易飞行[5]。
2 仿生鸟侦查飞行器运动仿真
使用SolidWorks的运动仿真功能对仿生鸟侦查飞行器进行了仿真。仿生鸟侦察飞行器的飞行过程并不复杂,本次仿真主要针对仿生鸟的飞行动作过程。运动仿真过程中,部分重要的动作如图5所示。

图5 仿生鸟侦查飞行器飞运动仿真图
由图5可知,仿生鸟侦查飞行器飞行时的飞行动作与鸟类的飞行动作相似,且在结构上并无干涉,即设计方案可行。
3 结语
通过SolidWorks软件对仿生鸟侦查飞行器的三维建模与运动仿真,仿生鸟侦查飞行器原理可行,在运动时,结构上并无干涉。若应用于军事方面,仿生鸟侦查飞行器能够探查敌情、目标追踪;若应用于日常生活中,仿生鸟侦查飞行器能够完成对环境或灾情的监测、考察,有着不错的应用前景。
