一类带有随机丢包和执行器饱和的网络化非线性系统的鲁棒H∞控制*
2022-04-20姜若瑾孙炜伟
姜若瑾, 孙炜伟②
(①曲阜师范大学自动化研究所,273165,曲阜市;②曲阜师范大学工学院,276826,山东省日照市)
0 引 言
网络控制系统(NCSs)作为一种新型的控制系统,在无人机、智能电网、远程制造、水下机器人等领域有着广泛的实际应用. 在NCSs中使用通信网络带来了许多优势,如减少系统布线,增加系统灵活性和易于维护等[1],这些优点使NCSs受到广泛的关注. 然而,诸如时延、信道衰减、丢包或者饱和等网络诱导现象都是不可避免的,这些问题会大大降低系统的性能和稳定性[2-4]. 因此,近些年出现了大量关于NCSs中相关问题的研究[5-8].
在上述问题中,由于网络固定带宽限制,丢包被看成是NCSs研究的主要挑战之一. 因此,如何处理丢包引起了人们极大的研究兴趣[9-11]. 一种较流行的方法是将丢包现象视为伯努利概率分布,该分布取通信信道中具有特定概率的0和1的值[12-14]. 此外,在一些研究成果中还有其他方法. 例如,利用马尔可夫跳变参数对网络控制系统中存在丢包的离散时间系统进行建模. 当前已经有一些关于这类模型的文章发表,如文献[15]. 另一种方法是将丢包替换为零,然后在测量中建立一个不完整矩阵,如文献[11].
另一方面,饱和也是导致系统不稳定的因素之一[16,17]. 在实际系统中,执行器饱和是一种极其常见且不可避免的现象,因此受到了广泛的关注. 执行器饱和可能会降低系统的性能,使稳定的闭环系统在受到较大干扰时变得不稳定. 因此,考虑执行器饱和可以避免系统恶化. 近年来,越来越多的文献开始讨论执行器饱和问题. 在文献[18]中,给出了具有执行器饱和和网络诱导时滞的网络控制系统的稳定性分析. 在文献[19]中,通过积分二次约束推广了执行器饱和的高频网络控制系统的稳定性. 文献[20]表明,可以通过引入辅助矩阵来处理执行器饱和问题.
从文献[14]和文献[16]等相关文献中初步看出,丢包问题基本都仅发生在从传感器到控制器的通信信道中,但实际上,从控制器到执行器的信道中也存在另一种丢包. 据作者所知,文献[12]是首篇研究多信道中发生的丢包的文章. 由此可见,对多信道中发生的丢包问题的研究并不多,但有必要进行此类研究. 此外,由于没有关于同时考虑多信道丢包和执行器饱和网络控制系统的文章,这促使我们进行这方面的研究. 在文献[14]中,文章仅考虑从传感器到控制器的丢包和执行器饱和,且这两篇文章都仅针对线性网络系统.
受上述文献的启发,本文首次对一类带有多信道随机丢包和执行器饱和的网络化非线性系统的鲁棒H∞控制问题进行研究. 丢包信道包括传感器到控制器信道和控制器到执行器信道. 此外,假设随机丢包服从伯努利随机二项分布. 我们的目标是设计一个基于观测器的H∞控制器,使得闭环系统鲁棒均方指数稳定并满足规定的H∞性能. 本文采用文献[20]中提出的方法来处理执行器饱和问题.
1 问题描述和预备知识
考虑以下带有执行器饱和的离散系统
(1)
其中xk∈n代表系统的状态向量,ωk∈m是指属于L2[0,∞)的干扰输入,uk∈q是控制输入,zk∈r是受控输出.A,B1,B2,C1和D1是具有适当维数的矩阵,ΔA代表不确定性,假设
ΔA=MAFE,
(2)
其中MA和E是具有适当维数的常数矩阵,F是未知矩阵并且满足
FTF≤I.
(3)
f(k,xk)是满足以下全局Lipschitz条件的非线性向量函数
‖f(k,x)‖≤‖G‖‖x‖,
(4)
‖f(k,x)-f(k,y)‖≤‖G‖‖(x-y)‖,
(5)
其中G是已知常数矩阵.
sat(u)=[sat(u1)…sat(uq)]T,
(6)
其中sat(ui)=sgn(ui)min(1,|ui|),i=1,2,…,q.
随机丢包可以看作是通信信道中伯努利概率分布并取0和1的概率值. 接下来,引入独立的伯努利分布白序列αk和βk,分别反映从传感器到控制器和控制器到执行器的信道中的随机丢包
yk=αkC2xk+D2ωk,
(7)
(8)
其中yk∈p是测量输出,C2是一个具有适当维数的已知矩阵.n是系统(1)的状态估计,q是没有丢包的控制输入,L∈n×q和K∈q×n分别代表观测器增益和控制器增益.βk与αk是取0和1值的且不相互关联的变量.
prob{αk=1}=
(9)
prob{αk=0}=1-
(10)
以及
prob{βk=1}=
(11)
prob{βk=0}=1-
(12)
为便于分析,给出如下引理:
引理1[20]令K,H∈m×n,对x∈n,如果对所有i=1,2,…,m,可以得到
(13)
为了便于系统性能的分析以及控制器设计,有如下形式
(14)

估计误差被定义为以下形式
(15)
将(1),(7),(8),(14),(15)式结合起来,可以得到
(16)
通过(15)和(16)式,有
(17)

基于上述分析,网络化闭环系统的模型可转化为以下形式
(18)
其中
下面给出均方指数稳定性定义.
定义1[17]当ωk=0,如果存在常数φ=0 以及τ∈(0,1),使得下式成立:
{‖ηk‖2}≤φτk{‖η0‖2},对η0∈n,
(19)
则闭环系统(18)是均方指数稳定的.
本文的目标是为系统(1)设计一个控制器,使得当存在执行器饱和和随机丢包的情况下,闭环系统同时满足以下两个要求:
(Q1) 闭环系统是均方指数稳定的;
(Q2) 在零初始条件下,对任意非零ωk,受控输出zk满足

(20)
其中γ>0 为给定的标量.
2 主要结论
为了便于接下来的研究,我们给出一个假设和一个重要的引理.
假设1 矩阵B1是列满秩,rank(B1)=m.
对于列满秩矩阵B1,存在正交矩阵U∈n×n,V∈m×m使得
(21)
其中U1∈m×n,U2∈(n-m)×n,Σ=diag{σ1,σ2,…,σm},σi(i=1,2,…,m)是B1的非零奇异值.
引理2[21]对于列满秩矩阵B1∈n×m,若矩阵P满足如下形式:
(22)
其中P11∈m×m>0,P22∈(n-m)×(n-m)>0,U1∈m×n,U2∈(n-m)×n,那么存在一个非奇异矩阵P∈m×m,使得B1P1=PB1成立.
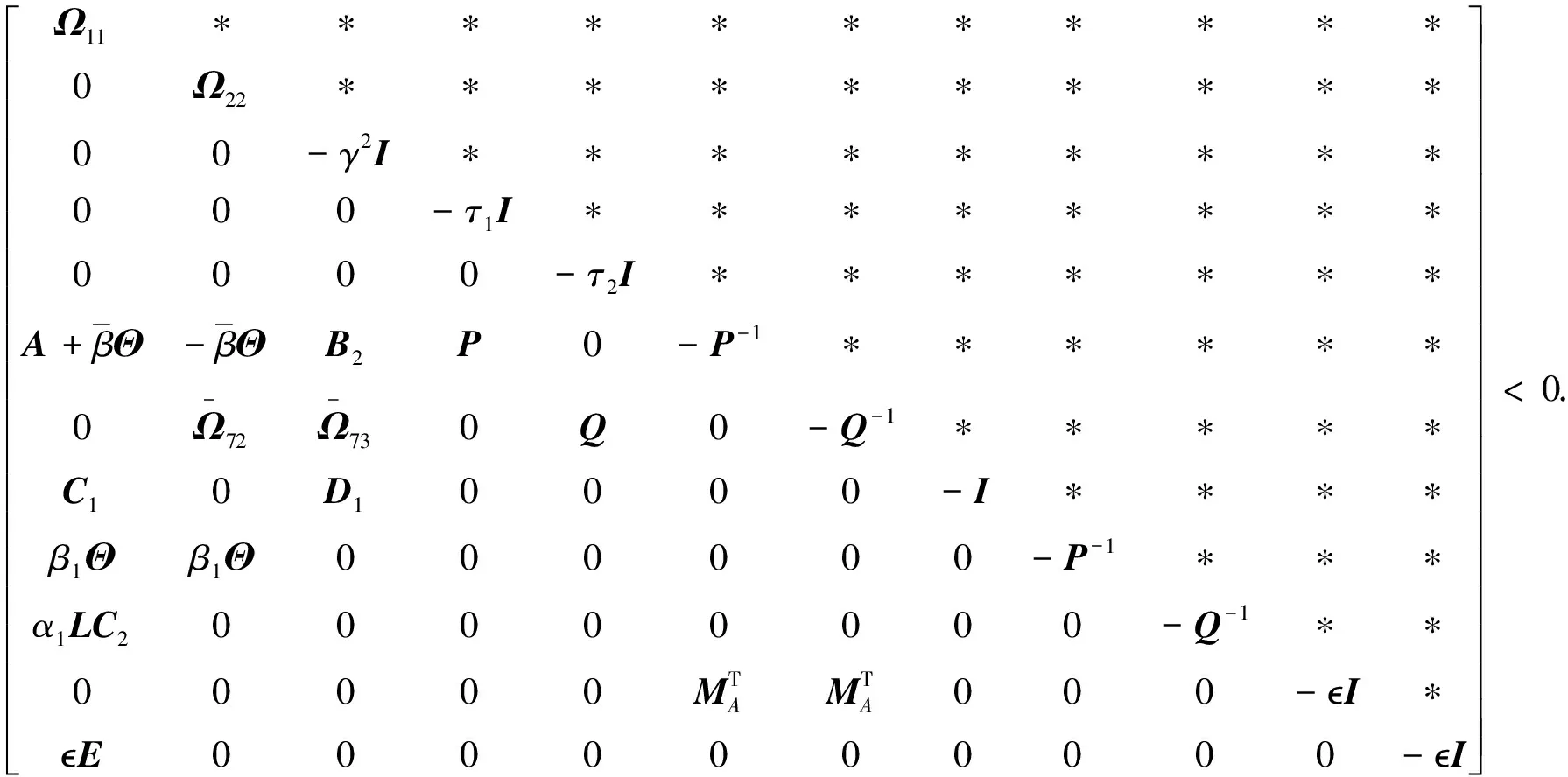
定理1给定控制器增益K和观测器增益L,如果存在正定矩阵P,Q,非负实标量τ1和τ2,满足如下不等式,则闭环系统(18)是均方指数稳定的.
(23)

证明选取如下形式的Lyapunov函数:
(24)
ΔVk={Vk+1|xk,…,x0,ek,…,e0}-Vk=
(25)
其中
(26)
其中
这意味着
(27)
(28)
通过S-procedure,可看出如果存在P>0,Q>0,τ1≥0,τ2≥0,使得
Λ-τ1Λ1-τ2Λ2<0,
(29)

ΔVk=
(30)
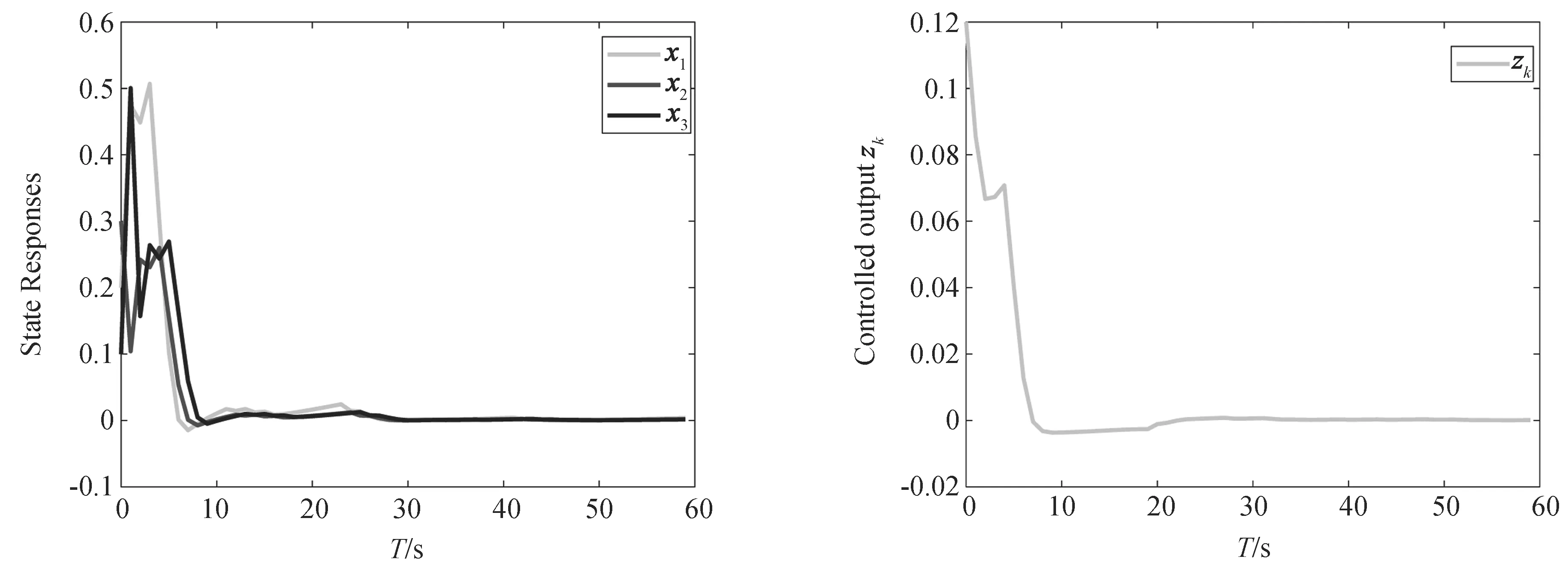
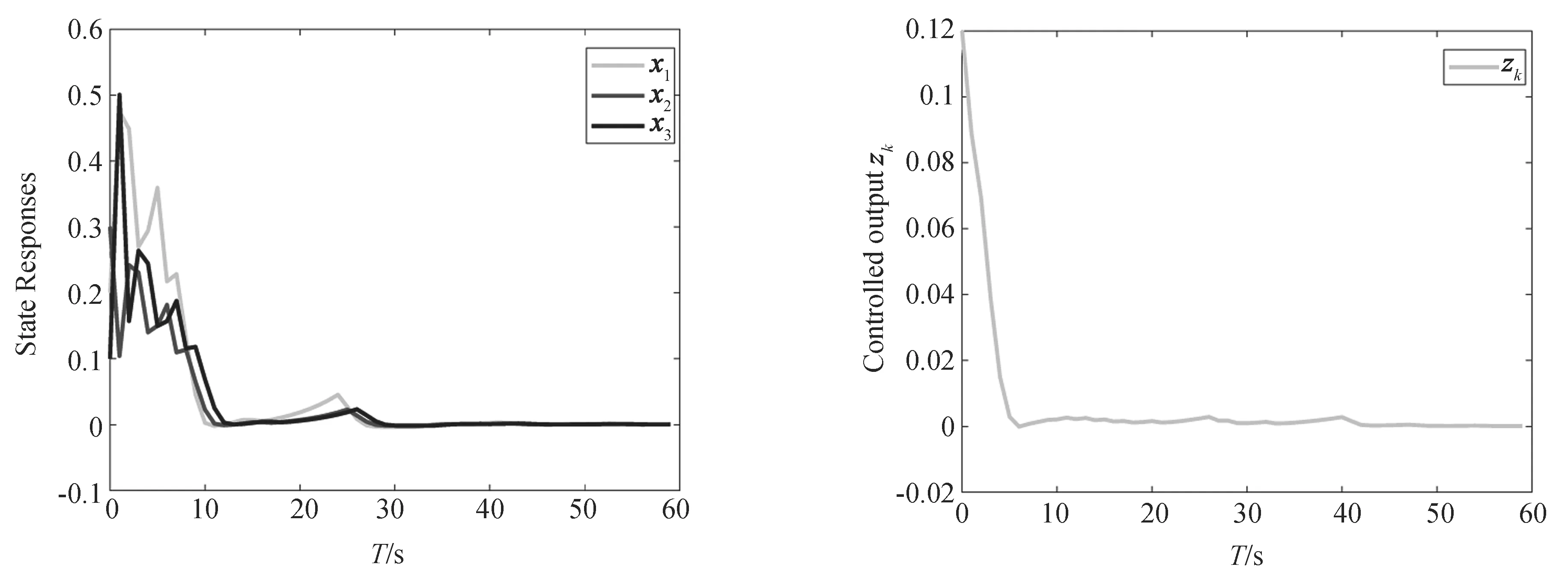
其中0<α 由(30),可以推出 ΔVk= (31) 因此,根据定义1,可知闭环系统(18)是均方指数稳定的. 证毕. 定理2给定标量γ>0,对于非零ωk,系统(18)是鲁棒均方指数稳定的且达到了规定的H∞性能约束,如果存在正定矩阵P和Q,以及矩阵K和L,非负实标量τ1和τ2以及正标量,满足下式 (32) 证明存在正标量>0,如果(33)式成立,则(32)式成立. (33) 根据S-procedure,(33)可被表示成如下不等式: (34) 其中 (35) 通过Schur补引理,可得(35)式,这说明(32)式成立,从而得出(33)式是成立的. 接下来,对任意非零的wk,从(16),(17)式和(25)式中可知 {Vk+1}-{Vk}+ (36) 其中 并且 接下来的过程类似定理1,此处省略.因此可以得出 {Vk+1}-{Vk}+ (37) 然后,求出(37)式中的k从0到∞的和,由于闭环网络系统(18)是均方指数稳定的且η0=0,因此可以直接得出以下结论: (38) 这就说明实现了H∞性能约束. 证毕. (39) (40) 其中 证明由引理2,存在一个非奇异矩阵P1∈m×m使得B1P1=PB1成立,并且 (41) 从而可得 P1=(VT)-1Σ-1P11ΣVT. (42) 我们可以推出以下结论: B1P1=PB1,M=P1K,N=QL. (43) 因此可知(40)式等价于(32)式. 其余部分证明和定理2相似,此处省略. 证毕. 本节给出一个例子来说明所提出方法的适用性和有效性. 考虑到(1)所描述的网络化非线性系统,给出主要的系统参数如下: K=[0.2259 0.1187 0.0013],L=[0.0431 0.0243 -0.0060]T. 仿真结果如图1、图2所示,可以证明控制目标已经实现. 图1 γmin=2.0342时的H∞控制 图2 γmin=2.0342时的受控输出zk K=[0.4590 0.1273 0.0012],L=[0.0448 0.0282 -0.0062]T. 仿真结果如图3、图4所示. 图3 γmin=4.1217时的H∞控制 图4 γmin=4.1217时的受控输出zk K=[0.6637 0.2428 0.0020],L=[0.0464 0.0319 -0.0064]T. 仿真结果如图5、图6所示. 图5 γmin=7.3813时的H∞控制 图6 γmin=7.3813时的受控输出zk 通过图1、图3、图5可以观察到,当丢包值比较大时,系统需要更长的时间才能收敛到零,并且系统的鲁棒性降低,而第一种情况下的最小值γmin均小于最后两种情况. 本文研究了一类带有随机丢包和执行器饱和的网络化非线性系统的鲁棒H∞控制问题. 文章同时考虑了两类通信信道中发生的丢包. 所构造的控制器可以使得闭环系统均方指数稳定并能达到给定的H∞性能指标. 最后,仿真结果验证了该方法的可行性. 未来的工作将集中在具有丢包和执行器饱和的网络化非线性离散Hamiltonian系统的鲁棒H∞控制问题.


3 仿 真

4 结 论
