“嫦娥四号”中继星再生伪码测距数据定轨精度分析
2022-04-15牛东文段建锋欧阳琦
牛东文,段建锋,欧阳琦,张 宇,陈 略,王 美
(北京航天飞行控制中心,北京 100094)
引 言
“嫦娥四号”月球探测器的中继卫星“鹊桥”,是人类历史上第一颗环绕地月L2点的专用中继通信卫星,于2018年5月21日利用“长征4号丙”火箭在西昌卫星发射中心成功发射,当前已成功运行在地月L2点的使命轨道。使命轨道为南簇Halo轨道,平均周期约为14 d,Z方向的轨道振幅约为1.3万km[1]。在地面应用系统和测控系统的支持下,“鹊桥”中继星在使命轨道一方面要定期维持其稳定运行在Halo轨道,另一方面还要为着陆器的月面工作以及“玉兔二号”巡视器的遥操作提供中继服务。根据任务规划,在“鹊桥”中继星进入地月L2点使命轨道段并正常运行后,将在着陆器、巡视器休眠期间择机开展再生伪码测距试验,验证地面测控设备与“鹊桥”中继星联合开展再生伪码测距的功能,评估再生伪码测距性能。
在深空探测任务中,深空航天器的导航定位需要高精度测距。地面测控站接收到的信号具有时延巨大、功率微弱的显著特点,所以相比近地测距,深空测距的技术难度更大。测距方法通常有两种:第一种是侧音测距;第二种是伪噪声(Pseudo Noise,PN)码序列测距,简称伪码测距。这两种方法的测距原理都是从地面测控站发出带有特殊标记的信号,航天器接收测距信号将其转发回地面测量站,然后比较发射的测距信号与接收的测距信号间的时间差或相位差,从中得到测距信息。侧音测距的优势是设备相对简单、测距精度高、捕获时间短,主要缺点是在测量中需要多次解模糊,解模糊能力差,同时硬件实现频率小于0.5 Hz的次侧音有困难,而最大无模糊测量距离又是由最小次侧音决定的[2]。因此,侧音测距多用于近地航天器,而伪随机码测距则多用于深空航天器。在伪随机码测距中容易采用长的码周期,可以增大无模糊距离,多次解距离模糊的复杂问题也能够避免,且可以增强抗干扰性和保密性,同时调制载波后可以和其它信号共同占用一个射频带宽。
随着深空探测任务的增多,近年来伪码测距在国际深空探测领域的发展与应用十分迅速,已经成为深空测距领域的一个研究热点。而再生伪码测距已经在美国航空航天局(National Aeronautics and Space Administration,NASA)的喷气推进实验室(Jet Propulsion Laboratory,JPL)设计的新航天器转发模块(Spacecraft Transponding Module,STM)中得到应用,此转发模块已经应用于深空与近地空间任务中。采用再生伪码测距后,地面测控站接收到的测距信号功率谱密度增加了30 dB。NASA已经开发出无线电通讯系统中的再生伪随机码测距跟踪系统,并应用于探测冥王星的“新地平线号”(New Horizons)任务中[2]。国内学者也对伪码测距的相关理论技术进行了研究,文献[3]介绍了NASA深空网采用的伪码测距基本原理,分析了再生伪码测距系统具体序列的产生、相关和距离解算的方法与途径,并计算分析了计算精度和捕获时间等系统关键技术指标。文献[4]结合工程经验数据,给出了伪码测距系统的具体实现结构,深入研究了相位噪声、群时延、电平抖动、时钟抖动、跟踪环路、热噪声、频率源稳定性和介质折射等引入的随机误差和系统误差,确定了伪码测距系统的主要误差源,为进一步提高伪码测距精度指出了方向。
本文在介绍“嫦娥四号”“鹊桥”中继星再生伪码测距试验的基础上,基于北京航天飞行控制中心的轨道计算与分析软件平台(BACC Orbit Determination and Analysis System,BODAS)[5],利用再生伪码测距试验获得的测量数据,通过与精密轨道的对比,对再生伪码测距数据的定轨精度进行评价分析。
1 再生伪码测距原理
伪随机码测距分为透明测距(Transparent Ranging)和再生测距(Regenerative Ranging)。所谓透明转发测距,是指航天器接收到地面发送的信号后从中提取出测距信号,经过滤波、下行调制处理,然后与遥测调制部分相加送到调制器下行发射。自由空间中距离发射机r处天线的接收功率由Friis公式给出[6]
其中:Pt为发射功率;Pr为接收功率;Gt为发射天线增益;Gr为接收天线增益;r为发射和接收之间的距离;η 为与传播无关的系统损耗因子;λ 为波长。由式(1)可知,对于透明转发测距,地面站将测距信号发出后,由航天器转发后地面站再接收到的信号信噪比正比于1 /r4,其中r是需要测量的航天器到测站的距离。
在再生测距系统中,伪随机测距码经过调相到上行载波中,然后从地面测站传输至航天器上。再生测距中用到的伪码信号是由测距时钟与一些伪随机码经逻辑组合而成。测距信号经航天器接收后,星上转发器将其进行解调,这样测距信号被获取。航天器重新生成与地面发射的测距信号完全一致的伪码测距信号,然后将此伪码信号通过调相方式调制到下行载波中。地面站接收到下行信号后解调出测距信号,将此测距信号与上行发射的伪码信号进行互相关处理,得到伪码信号的时延值,该时延值就对应了目标与地面站间的距离信息。由于航天器再生了测距信号,即测距信号由航天器再生后发给地面站,由式(1)可知,采用再生测距的方式地面站接收到信号的信噪比与1/r2成正比。再生伪码测距系统结构如图1所示。
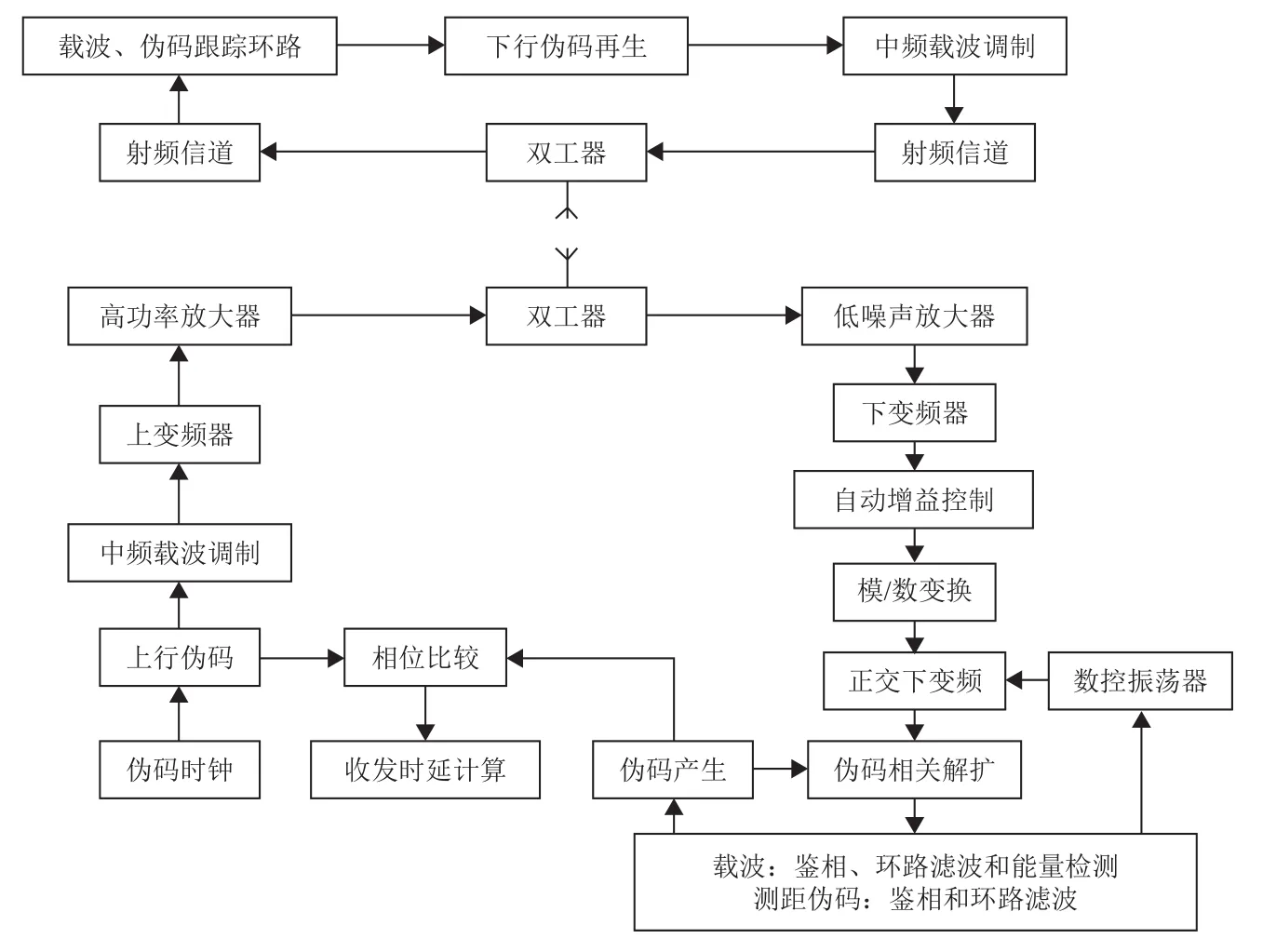
图1 再生伪码测距系统结构图Fig.1 Chart of regenerative pseudo-random code ranging
再生测距利用专门的电路对测距信号进行捕获和跟踪,待整个测距信号锁定以后,跟透明转发测距一样,进行下行调制度处理,再与遥测调制部分相加。采用再生测距,一方面由于再生了信号,所以不存在因为测距通道的前端滤波器滤掉测距信号高次谐波而引起信号质量下降的问题,另一方面再生测距码跟踪环的环路带宽非常小(一般为Hz量级),因此噪声大为减小(与透明转发测距的MHz量级相比)。根据上行信号强度不同,再生伪码测距能将返回到测距设备的测距信号的信噪比提高达30 dB,这部分增益可以以3种方式提高测量性能:一是下行测距信号调制度和测距时间不变,测距精度可以得到提高;二是减小测距信号的调制度,而遥测信号的功率增加,进而减少遥测误码率,有利于对航天器的状态和控制情况进行判断;三是测距时间可以减少[7]。
1.1 PN码结构
测距精度是测距的核心问题。空间数据系统咨询委员会(Consultative Committee for Space Data Systems,CCSDS)建议选择两种伪随机码,称为权重平衡陶思沃斯码(Weighted-Voting Balanced Tausworthe Code), ν =4(T4B)与ν =2(T2B)[2],即T4B权重平衡陶思沃斯码和T2B权重平衡陶思沃斯码。
权重平衡陶思沃斯码是由6个周期的二进制序列通过组合算法组合而成,将权重因子 ν =4与ν =2赋予测距时钟序列C1。再生测距使用的伪随机码的测距序列是由测距时钟与数个PN分序列的逻辑组合而成的。测距时钟序列是周期为2的周期性二进制( ± 1)序列。PN码是周期性的二进制( ± 1)序列,在一个长度L的周期上,其周期性自相关函数有峰值+L,其余所有L–1个峰值外的值等于–1。PN码序列长度分别为2、7、11、15、19、23。T4B陶思沃斯码与T2B陶思沃斯码在结构上是一致的,其组成的序列结构如图2所示。
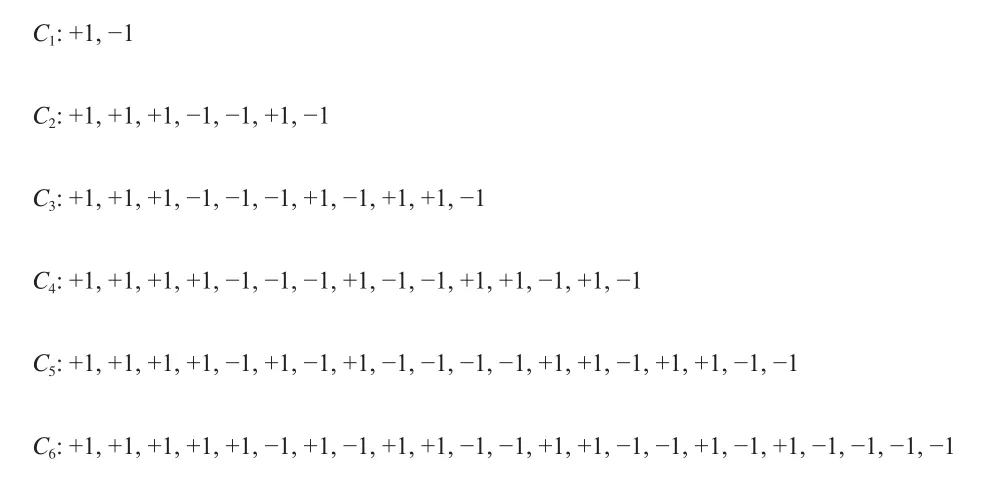
图2 再生测距陶思沃斯码Fig.2 Regenerative ranging Tausworthe code
对于T4B陶思沃斯码的最终组合序列

对于T2B陶思沃斯码的最终组合序列

1.2 码速率与模糊度
地面站发射机将图2所示的伪随机码序列组成一个总长度为1 009 470位的唯一序列调制到上行载波中,采用的是线性调制方式。测距信号的码速率应该与上行载波的频率相关,表达式如下,其中k=6,l={1,2,4,8,16,32,64},或者l=2,k={8,9,10}。
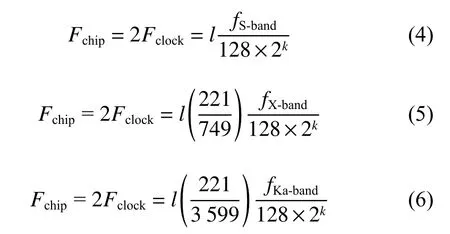
其中:Fchip为码速率,单位Mchip/s;Fclock为测距时钟,单位MHz;fS-band、fX-band、fKa-band分别为S波段、X波段、Ka波段的上行载波频率,单位MHz。双程伪码测距模糊度为

其中:L为伪码序列总长度;c为光速。
地面站为了更好地协同工作,最少需要满足两种码速率的值:一种码速率的值约为2 Mchip/s(l=8,k=6),另一种码速率的值约为1 Mchip/s(l=4,k=6)。
1.3 再生伪码测距与侧音测距下行链路功率
采用再生伪码测距时,下行链路测距信号的功率为[8]

而采用侧音测距时,下行链路测距信号的功率为[9]

其中:PPN是伪码测距信号功率;PT是下行信号总功率;mTM是遥测数据调制指数;mPN是伪码测距信号调制指数;mST是下行测距音的有效调制指数;mN是下行测距信道中热噪声的有效调制指数;J1(mST)是变量mST的一阶贝塞尔函数。
当调制指数mST<1时,mST的一阶贝塞尔函数的拟合多项式为

需要说明的是,在侧音测距中,调制指数mST和mN都不等于下行测距调制指数的设计值mRD,这是因
为测距信道中的自动增益控制电路加强了如下约束

即下行测距信道的总功率(测距信号功率加上信道带宽内的噪声功率)是一个恒定值,有效的下行调制指数为
其中: Γ为应答机测距信道的信噪比。
而在再生伪码测距中,由于上行链路中测距通道的热噪声不带到下行测距通道中,其下行链路设计的伪码调制指数mPN就是实际下行链路的测距调制指数,同时mPN通常是按档位设计为固定值。
2 再生伪码测距试验及功率分析
2.1 再生伪码测距试验概况
2019年6月,“鹊桥”中继星进行了再生伪码测距试验,试验内容包括数字应答机功能验证测试、伪码测距功能测试、伪码测距特性测试和伪码测距精密定轨测试等,获取了数字应答机的捕获时间、捕获概率和测距结果等数据,测试结果正常。在伪码测距精密定轨测试中,采用了T4B陶思沃斯码,其码速率值约为2 Mchip/s(l=8,k=6),对再生伪码测距的距离捕获时间、概率和测距性能进行了测试。参与试验的测控站主要为佳木斯深空站、喀什深空站、阿根廷深空站、纳米比亚站。测试期间“鹊桥”中继星没有进行轨道维持或动量轮卸载,这样在试验后通过精密定轨来评估再生伪码测距性能时,避免了对轨道维持或动量轮卸载产生的速度增量的求解估计,即为通过精密定轨评估再生伪码测距性能提供了良好条件。再生伪码测距时段如表1所示,在其它部分时段进行了侧音测距,以便于进行定轨精度对比分析。
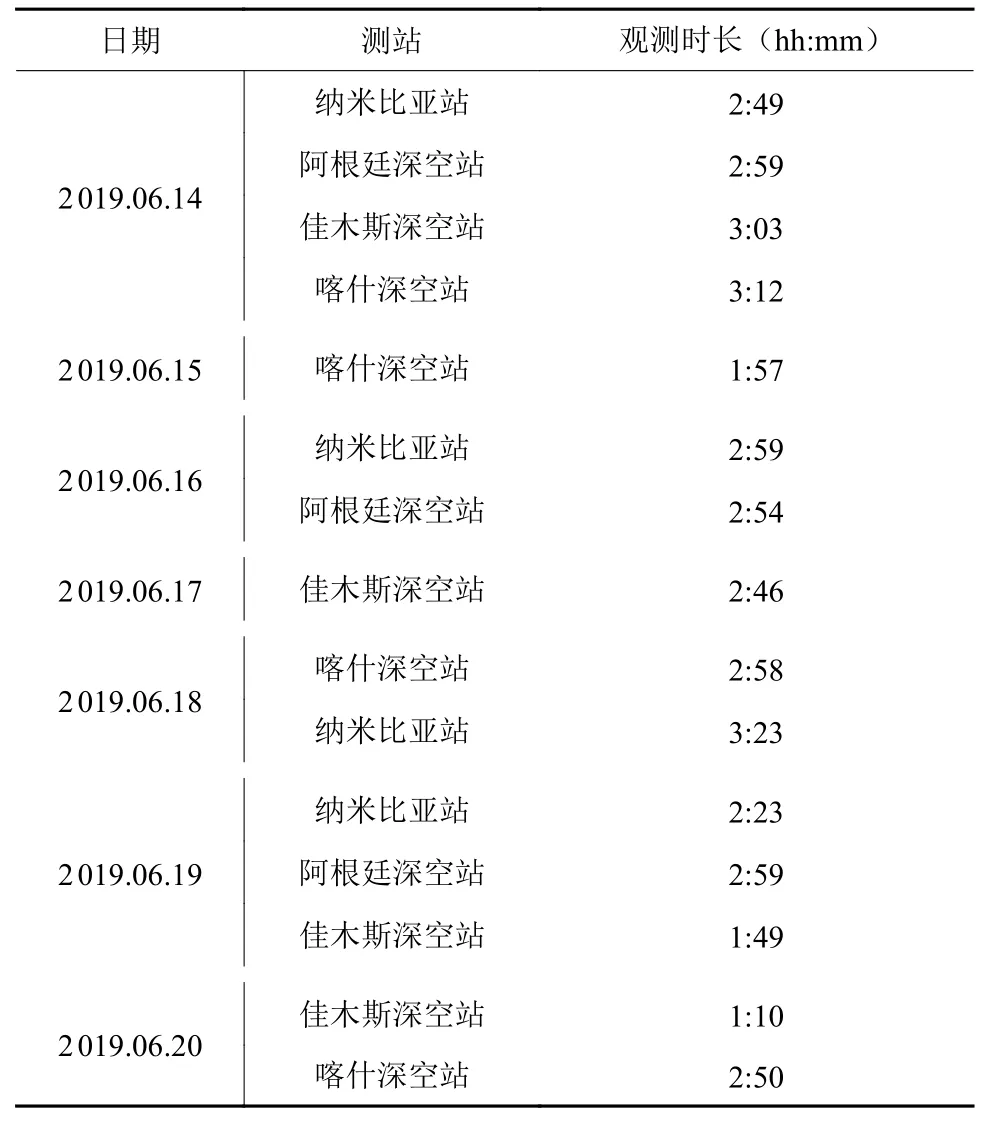
表1 “鹊桥”中继星再生伪码测距试验时段(北京时间)Table 1 Regenerative pseudo-random code ranging experiment schedule(BJT)
2.2 再生伪码测距信号功率分析
为了便于比较下行链路伪码测距信号功率和侧音测距信号功率,在1.3节的式(8)和式(9)中,取伪码测距和侧音测距的下行信号总功率PT及遥测数据调制指数mTM相等,则有

根据本次“鹊桥”中继星伪码测距试验的情况,在式(13)中取mPN的设计值为固定值0.5 rad,取侧音测距设计调制指数范围为mRD=(0:1),同时取应答机测距信道的信噪比 Γ 为20 dB,侧音测距有效调制指数mST和测距信道中热噪声的有效调制指数mN分别利用式(11)和式(12)进行计算,则PPN/PST(dB)理论计算结果如图3所示。从图3可看出,在侧音测距设计调制指数较小时,下行链路的伪码测距信号的功率要高出侧音测距信号功率很多,而随着侧音测距设计调制指数的增加,下行链路的伪码测距信号功率将与侧音测距信号功率趋于一致。
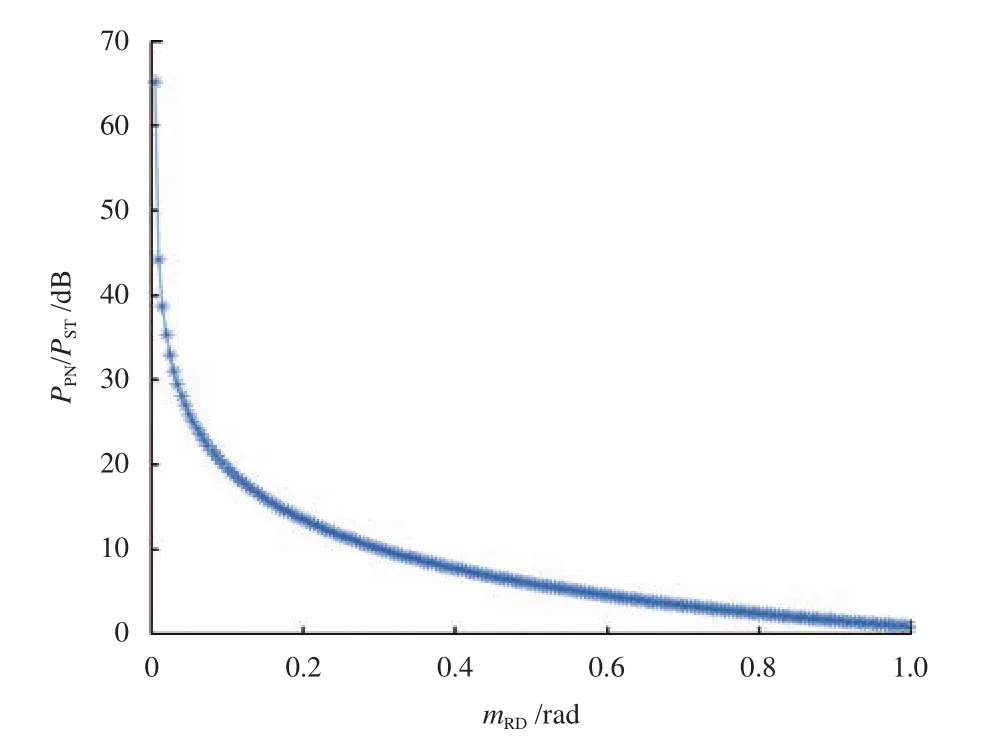
图3 下行链路再生伪码测距与侧音测距信号功率比Fig.3 Power ratio of downlink regenerative pseudo-random code ranging to sidetone ranging signal
需要说明的是,在此次“鹊桥”中继星的伪码测距试验中,伪码测距的信噪比相对于侧音测距的信噪比提高了大约3~6 dB,并没有达到国外文献所说的30 dB。通过分析“鹊桥”中继星的试验条件和国外文献资料,“鹊桥”中继星的伪码测距是试验状态,是功能测量,当时采用的上行发送功率均较高,这样对于侧音测距来讲通过器上自动增益控制电路获得的测距调制指数较高,从而试验结果的3~6 dB是与图3的理论计算结果相符的。而国外文献描述的30 dB是在上行功率微弱的状态下取得的结果,这样在侧音测距中通过器上自动增益控制电路获得的测距调制指数也会较低,从图3的理论计算结果也可以看出这一结论。而再生伪码测距的下行测距信号功率在器上能正确解调出上行测距伪码的情况下,是与上行信号功率无关的,而与器上具体设计有关。所以“鹊桥”中继星的伪码测距试验中没有达到国外文献描述的比侧音测距信号的信噪比高出30 dB的情况。
3 再生伪码测距数据定轨精度分析
3.1 再生伪码测距数据处理
再生测距的误差源包括频率基准源、传播介质、热噪声等。频率基准源是测距系统的核心部件,基准频率不稳是测距误差的重要来源,高精度应用时一般选择超稳振荡器(Ultra-Stable Oscillator,USO)[10]。传播介质是测距中另一个重要误差源,主要包括对流层误差、电离层误差、太阳等离子误差等。对于再生伪码测距的这些误差,需要在进行精密定轨之前进行数据处理,以消除或者修正误差,提高后续精密定轨精度。
再生伪码测距数据处理包括:
1)数据合理性检验
在数据合理性检验中,主要是对测距(测距和)、测速等外测数据和测站高程、温度、湿度、压强等气象数据设定一定的范围,超过该范围的数据即认为是不合理数据,予以剔除。
2)数据平滑
数据平滑中采用3阶最小二乘法多项式拟合,以减小随机误差。
3)传播介质修正
对于传播介质误差修正,利用测站配备的环境参数采集设备测量相关的气象参数,对电离层和对流层等传播介质误差项进行修正,采集设备包括水汽微波辐射计、GNSS双频接收机、气象仪等[11]。同时完成应答机零值修正和软件解模糊,双程模糊度计算公式即式(7),而测站测控设备的零值和轴系误差等修正已由测站设备级计算机完成[12]。
3.2 定轨基本策略
“鹊桥”中继星在地月L2点长期运行期间,因其不稳定的轨道特性,需要进行经常性的轨道维持控制使其轨道得以保持[13]。根据第2.1节的再生伪码测距试验时段及“鹊桥”中继星轨道维持情况,精密定轨使用2019-06-13T19:00:00—2019-06-23T11:00:00共约10 d的侧音测距、伪码测距、测速和VLBI数据进行计算,轨道改进历元时刻为2019-06-13T19:00:00,其中2019-06-14、2019-06-16、2019-06-18、2019-06-19每天有约1 h的VLBI测量数据。分析采用的动力学模型如表2所示[14-19],月球非球形采用8×8的Grail660模型,积分中心为地心。再生伪码测距试验期间,“鹊桥”中继星没有过阴影,姿态对日稳定,在精密定轨的时段中采用固定光压系数并作为一个待估参数,光压系数初值(Cr)和光压等效面积如表2所示。

表2 定轨分析策略Table 2 Strategy for the orbit determination
3.3 再生伪码测距与侧音测距定轨精度对比分析
本节采用表2的动力学模型,按照4种策略进行再生伪码测距与侧音测距定轨及预报精度分析,使用2019-06-13T19:00:00—2019-06-21T12:00:00共约8 d的测量数据,轨道改进历元时刻为2019-06-13T19:00:00,预报至2019-06-23T11:00:00。4种策略分别为:侧音测距、测速和VLBI数据联合定轨,侧音测距和测速联合定轨,伪码测距、测速和VLBI联合定轨,伪码测距和测速联合定轨。在定轨中均求解测距和的系统差。4种策略测距数据质量评估如表3所示,与精密轨道比较的RTN方向误差统计结果如表4所示。从表3可以看出,再生伪码测距数据的RMS要优于侧音测距数据RMS一个量级。从表4与精密轨道的比较结果可以看出,再生伪码测距数据定轨和预报精度要优于侧音测距数据一倍。通常来讲,定轨的误差来源通常有测量数据误差、动力学模型误差、积分方法误差、观测几何等几个方面,是综合了测量、模型、几何及数学方法等各方面的误差后的结果。而本小节是在3.2节的定轨基本策略基础上,在动力学模型和积分方法等其它方面均一致的条件下,分析得到了分别使用伪码测距数据和侧音测距数据与其它测量数据联合定轨和预报的误差结果。
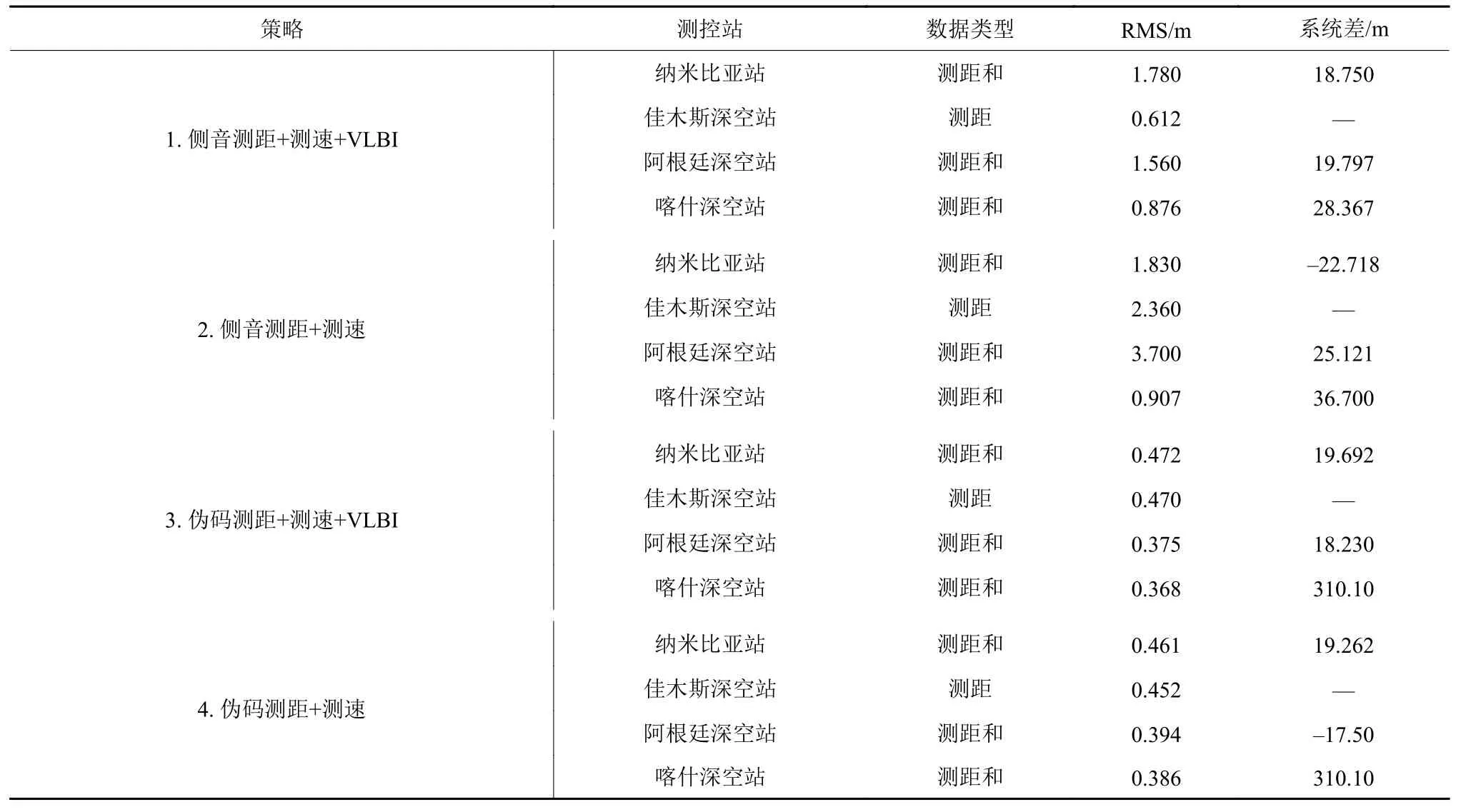
表3 不同策略定轨数据质量评估Table 3 Orbit determination data quality evaluation for different strategies

表4 不同策略定轨结果与精密轨道比较统计Table 4 Statistics on comparisons of orbit determination results of different strategies with the precision orbit
文献[3]给出了伪码测距系统各种误差源的随机误差计算公式,并给出正常工作条件下码速率为1 Mchip/s时,伪码测距系统的RMS可以控制在1 m[3]。“鹊桥”中继星在进行伪码测试时采用约2 Mchip/s的码速率,按照文献[3]的计算公式伪码测距数据的RMS可以控制在0.5 m,表3的数据质量评估结果与这一结论相符。需要说明的是,定轨数据的RMS是数据的残差均方根差,其表征了测量数据的噪声水平,本文测量数据的RMS是在迭代定轨过程中,根据定轨结果计算的观测数据理论值与对应时刻实际观测值进行对比,得到的定轨数据的均方根差。
4 结 论
在深空探测任务中,高精度测距为深空航天器的导航定位提供了测量元素[2]。利用 “鹊桥”中继星进行的再生伪码测距,是中国首次在地月距离以外进行的再生伪码测距试验[20],可以充分体现再生伪码测距在深空任务导航中的优势。本文主要对 “鹊桥”中继星再生伪码测距数据定轨精度进行了评估,得出再生伪码测距数据的RMS要优于侧音测距数据RMS一个量级,同时再生伪码测距数据定轨和预报精度要优于侧音测距数据一倍。从测量原理上易知,再生伪码测距的测量精度和定轨精度要优于侧音测距,但在中国的实际任务中再生伪码测距还没有真正的实际应用。本文利用 “鹊桥”中继星再生伪码测距试验的实际轨道测量数据,通过精密定轨分析从定量上验证和进一步说明了这一结论,对于再生伪码测距在中国后续深空探测任务中的实际应用可以提供参考。
