稀疏观测模式的“嫦娥四号”中继星轨道确定
2022-04-15刘思语李培佳
刘思语,黄 勇,李培佳,杨 鹏
(1.中国科学院 上海天文台,上海 200030;2.中国科学院大学 天文与空间科学学院,北京 100049;3.上海科技大学 物质学院,上海 201210)
引 言
“嫦娥四号”着陆器于2019年1月3日成功着陆月球背面并成功释放“月兔二号”月球车,这是世界首次实现月球背面软着陆与遥感通信。由于月球自转与绕地球公转周期相同,月球总是以同一半球面向地球,位于月球背面的“嫦娥四号”着陆器无法直接接收来自地面测控站的信号,因此需要另一颗中继星传输数据。
2018年5月21 日“嫦娥四号”中继星于西昌卫星发射中心搭载“长征四号丙”运载火箭发射,5月25日完成近月制动,进入月球–地月L2点转移轨道。在经过近月制动和两次中途修正后,“嫦娥四号”中继星于6月14日成功转入地月L2点的Halo轨道,成为世界上第一颗进入地月L2点Halo轨道的探测器,也是世界首颗月球通信中继卫星。“嫦娥四号”中继星由CAST100卫星平台研制,地面测站通过S波段的通讯链路接收中继星的测距和多普勒数据并发送遥控信息。“嫦娥四号”中继星任务期间,甚长基线干涉测量技术(Very Long Baseline Interferometry, VLBI)测站首次利用SΔDOR技术(差分单向测距)进行测轨。由于地面测站S波段受地磁干扰强及电离层影响大,测站配备了S波段信号滤波设备减少外部无线电干扰,并采用GNSS快速处理建模技术提高电离层时延修正精度。此外“嫦娥四号”中继星还搭载了与荷兰共同研制的低频射电探测器,能够探测太阳系内行星和银河系的低频射电辐射[1-2]。
“嫦娥四号”目前已完成了着陆器在月球背面软着陆轨迹和精确定位着陆的复现;利用近红外光谱仪探测月球背面,实现了对着陆区月壤和岩石矿物含量的勘探,为月球幔部物质组成提供了新的证据;利用“嫦娥四号”测月雷达高频通道实现对着陆区次表层的探测,分析了从月壤表面到月表下层40 m的物质特性[3]。“嫦娥四号”中继星为以上任务的顺利进行提供了通信上的坚实保障,而“嫦娥四号”中继星的轨道确定也尤为重要。当前“嫦娥四号”中继星运行模式已进入长管阶段,平均4~5日会进行一次VLBI观测,无轨道维持的弧段仅包含1~2次VLBI观测,无轨道维持和动量轮卸载的弧段仅包含1天以下的VLBI观测。对比“嫦娥四号”任务期间,观测频率显著降低,处于稀疏观测模式。2018年10月15—17日,中国VLBI网对“嫦娥四号”中继星进行3天的联合集中观测,每日观测时长2 h,观测弧段内未进行轨道维持和动量轮卸载。以10月15—17日和10月16—19日为定轨子弧段,重叠弧段包括2天VLBI观测数据,在无变轨情况下“嫦娥四号”中继星轨道位置精度约为33 m,速度精度约为1 mm/s[4]。本文分析了2021年1月处于稀疏观测模式下的“嫦娥四号”中继星轨道精度;同时分析了深空站观测时长和频率对中继星定轨精度的影响。
1 L2点与Halo轨道
其中

平动点的解满足

国际上常采用的L2点轨道包括Lissajous轨道和Halo轨道,2010年8月美国ARTEMIS任务的P1探测器进入地月L2点Lissajous轨道,这是世界上第一颗到达地月L2点的探测器[6]。美国国家航空航天局(National Aeronautics Space Administration,NASA)的深空站每隔一日对探测器进行3.5 h的观测,伯克利地面站每日对探测器进行两次观测,每次观测约45 min以获取测距和多普勒数据。基于测距和多普勒数据的定轨结果满足位置精度优于1 km,速度精度优于1 cm/s的轨道需求。2011年6月—2014年4月“嫦娥二号”卫星实施拓展试验,运行于地日L2点Lissajous轨道[7]。2014年探月工程三期再入返回飞行探测器(CE-5T1)进入地月L2点Lissajou轨道,成为我国第一颗绕地月L2点运行的探测器。CE-5T1探测器绕地月L2点飞行约40天,平均3天进行一次VLBI观测,定轨后位置和速度精度达到百米和毫米/秒量级。此外NASA的“月球轨道平台门户”计划预计在平动点附近的NRHO(近直线Halo轨道)建设月球空间站[8-9]。
“嫦娥四号”中继星使命轨道为地月L2点Halo轨道。Halo轨道在地月旋转面上做周期运动,且此平面和该平面的垂直面振动频率相同,在z方向上做周期振动,振幅约1.3万km,平均轨道周期约14天。与Lissajous轨道相比,地月L2点Halo轨道不会被月球遮挡,能够长期保持同时对地球和月球背面的直视[10-13]。
2 中继星观测模式
2.1 台站概况
长管阶段对“嫦娥四号”中继星观测采用VLBI时延、时延率、测距和测速联合测轨的方式。参与观测的VLBI测站包括上海天马站65 m、北京密云站50 m、昆明站40 m、新疆南山站26 m射电望远镜。地面深空站包括佳木斯站、喀什站65 m、南美站35 m、青岛站18 m、喀什站18 m、纳米比亚站18 m。另外由于目前还有对“嫦娥五号”和“天问一号”的观测计划,各测站的观测任务集中,佘山站25 m射电望远镜也作为VLBI测站的补充。具体台站分布见图1。
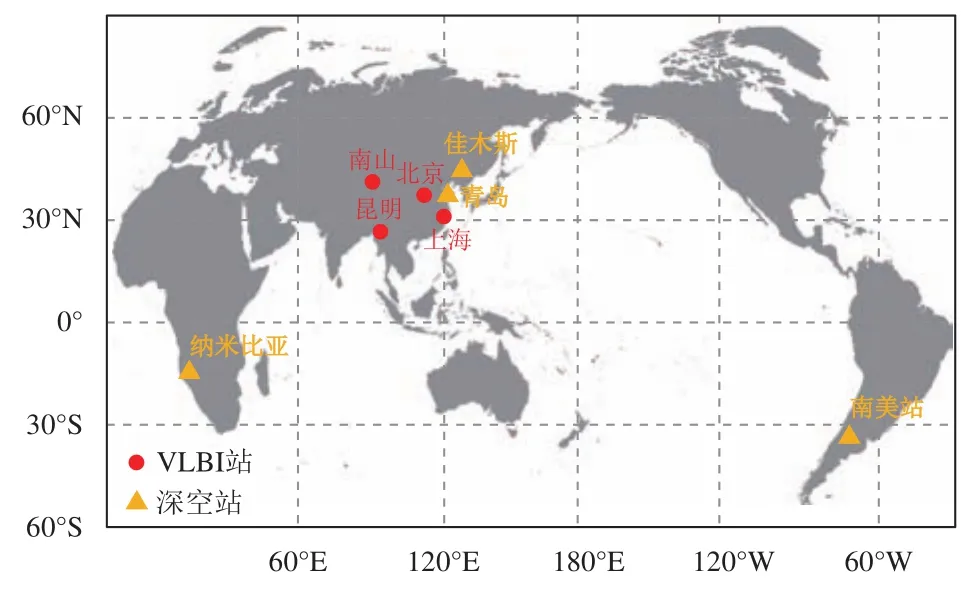
图1 中国VLBI测站及深空站分布Fig.1 Distribution of VLBI stations and deep space stations in China
2.2 观测模式
每次观测需要北京站、上海站、昆明站和南山站中任意3个VLBI测站满足仰角10°以上共视时开始观测。观测开始前基于“嫦娥四号”中继星预报轨道制定观测纲要,确认各测站跟踪中继星所用的天线方位俯仰参数,并根据参与观测的测站决定适合差分VLBI观测的射电源。测站对中继星和目标射电源进行交替观测,每观测10 min中继星后,交叉观测5 min射电源,并在观测开始前和结束后对射电源进行一定时间的追踪。通过对射电源的观测可以计算测站的设备系统误差、台站氢钟钟差、电离层和中性大气对VLBI时延和时延率的影响,提高观测精度[14]。与“嫦娥四号”中继星任务时期相比,长管期间的VLBI测站的氢原子钟由SOHM-4型更新为SOHM-4A型,有效提高了电性能指标和可靠性指标。高稳定度的频率基准信号直接影响观测灵敏度和测量精度。
2021年1月各测站共对“嫦娥四号”中继星进行7次VLBI观测,平均4~5天一次,每次约150 min。深空站每日追踪中继星轨迹,观测时间最短的一日为7 h,最长的一日为13 h。由于地月L2点为不稳定点,需要定期进行轨道维持保证中继星处于所设计的轨道。2021年1月“嫦娥四号”中继星共进行3次轨道维持,此外还有若干次的动量轮卸载,包括主动卸载和被动卸载,站内卸载和站外卸载。各测站观测时间见图2。
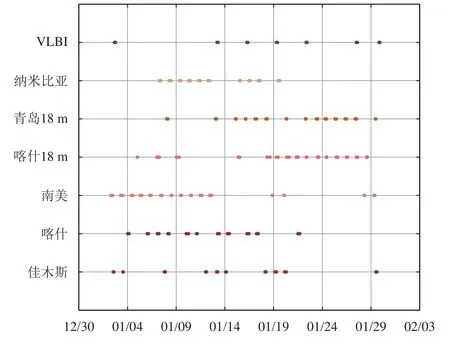
图2 2021年1月“嫦娥四号”中继星观测分布Fig.2 Observation distribution of Chang’E-4 relay stars in January 2021
3 轨道精度评估
基于2021年1月2—27日约一个月的观测数据,对“嫦娥四号”中继星进行定轨。选取5段不存在轨道机动和动量轮卸载的弧段,以轨道维持后的控后理论轨道为初轨。每段定轨弧段分为两段子弧段,重叠子弧段评估非变轨时期中继星的轨道精度,基本定轨策略见表1。弧段A至弧段E分别包含不同的测量数据类型,包括测距、测速、VLBI时延和时延率(见图3)。各自的重叠的子弧段的数据类型也不同。最短的一组子弧段约为34 h,最长的一组子弧段约为60 h。重叠弧段占子弧段比例为10%~30%。轨道精度通过重叠弧段的轨道差异RMS值评估。弧段与子弧段覆盖范围见表2和表3。
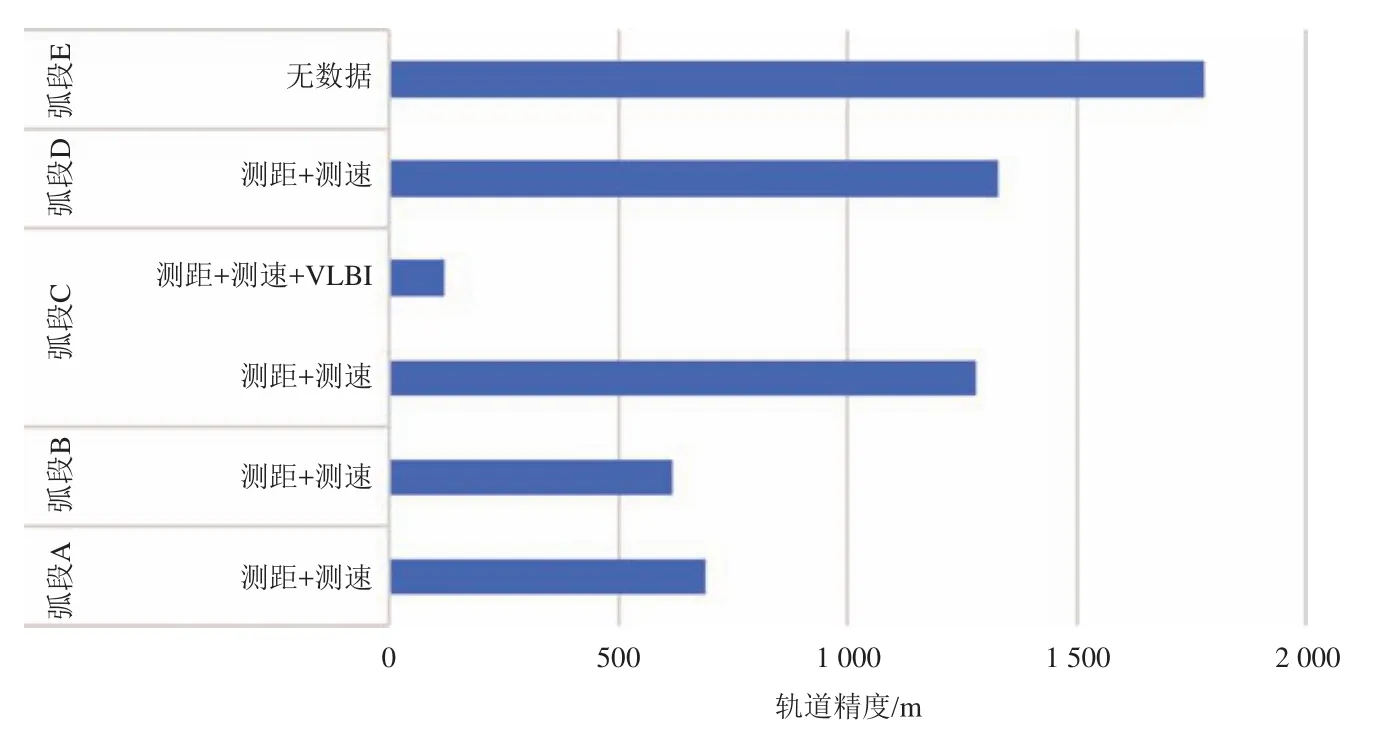
图3 “嫦娥四号”中继星轨道精度Fig.3 Chang’E-4 relay satellite orbit accuracy

表1 “嫦娥四号”中继星定轨参数Table 1 Orbit determination parameters of Chang’E-4 relay satellite

表2 “嫦娥四号”中继星定轨弧段分布Table 2 Chang’E-4 relay satellite orbit determination arc

表3 “嫦娥四号”中继星定轨子弧段重叠分布Table 3 Chang’E-4 relay satellite orbit determination sub-arc
图3显示重叠子弧段包含不同类型测量数据的“嫦娥四号”中继星轨道精度。“嫦娥四号”中继星绕地月L2点运行的轨道精度优于2 km,重叠弧段包含观测数据的弧段其轨道精度优于无观测数据的弧段。在重叠弧段包含测距和测速数据的轨道,定轨精度优于1.4 km;在重叠弧段包含VLBI数据的轨道,定轨精度为百米量级。弧段C的轨道精度相比其它弧段有显著提高,主要是因为弧段C的两段定轨子弧段均包含VLBI时延数据的约束。测距和测速数据仅能提供站心至探测器的径向测量信息,VLBI时延在此基础上可提供横向的约束。“嫦娥四号”中继星的定轨时延精度优于1 ns,在基线长度为4 000 km(新疆–上海)、仰角30°、探测器离地球44万km的条件下,1 ns的时延精度可提供66 m的横向约束。因此在观测弧段中加入VLBI数据可大幅提升“嫦娥四号”中继星轨道精度。
弧段C包含1月14—18日共5天的观测数据,其中1月14日9时“嫦娥四号”中继星进行轨道维持,变轨后仅有2 h的测距和测速数据。1月15—18日的4次观测均包含7 ~13 h的测距+测速数据,其中1月16日含2.5 h的VLBI时延和时延率数据。基于弧段C内所有观测数据计算得到的轨道为精轨,选取弧段C内不同时间段的观测数据定轨,比较定轨结果与精轨的位置、速度差异。
“嫦娥四号”中继星精密轨道的测距、测速、时延、时延率残差如图4,分别为1.05 m、0.75 mm/s、0.15 ns、0.5 ps/s。
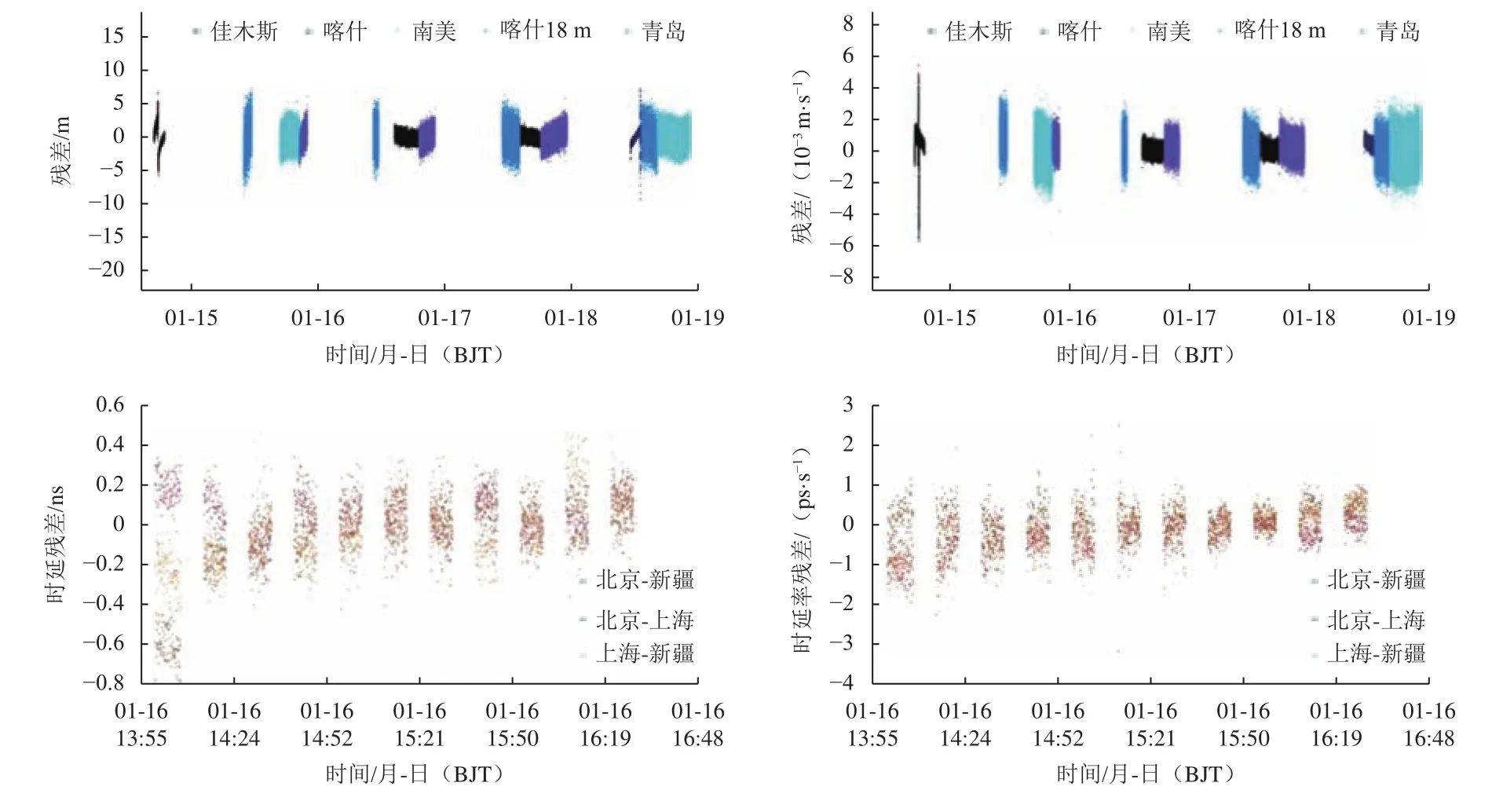
图4 “嫦娥四号”中继星精轨残差Fig.4 Residual error of the precision orbit of Chang’E-4 relay satellite
基于以下4个策略对“嫦娥四号”中继星进行轨道确定,其中策略1不包含VLBI数据,策略2、3、4包含1月16日的VLBI数据。策略1包含弧段C内全部测距+测速数据;策略2在弧段C内每日选取2 h测距+测速数据;策略3在弧段C内每日选取4 h测距+测速数据(1月14日仅包含2 h测距+测速数据);策略4在弧段C内每日分段选取2段2 h,共4 h的测距+测速数据。
图5和图6显示,在观测中加入VLBI数据能显著提高“嫦娥四号”中继星轨道精度。在有VLBI观测的前提下,测距和测速数据覆盖率越广,轨道精度越高。在测距和测速数据覆盖率相等的情况下,分段安排各深空站观测时间,能有效提高“嫦娥四号”中继星轨道精度。
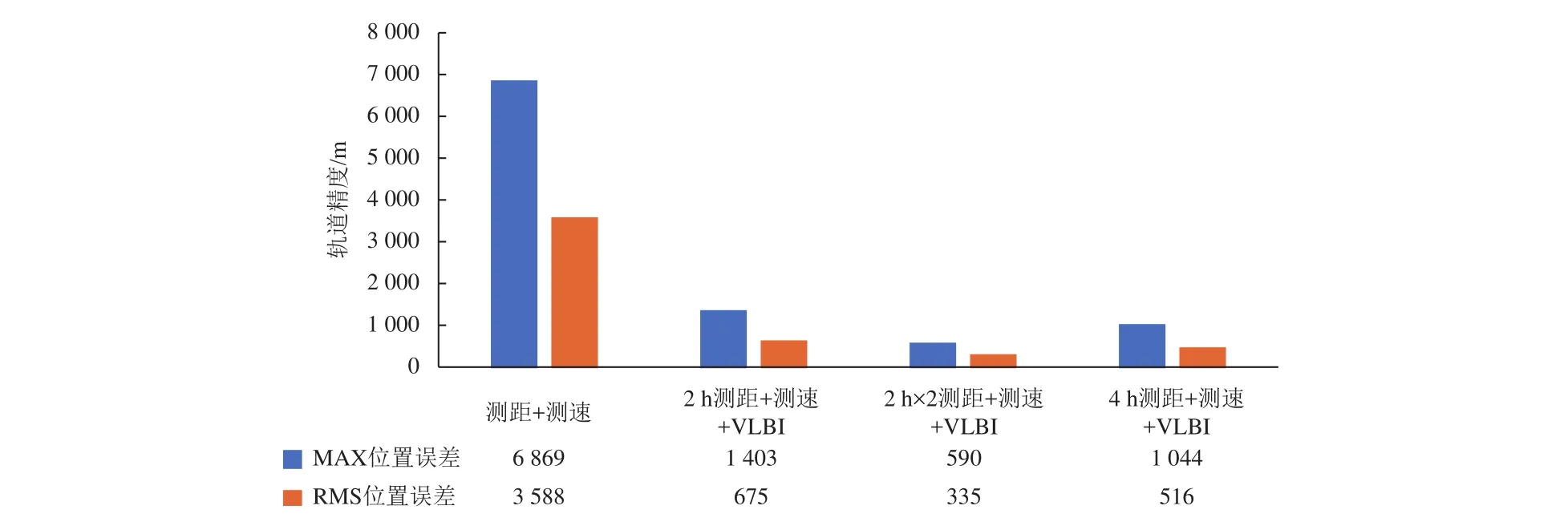
图5 不同数据组合下轨道位置差异Fig.5 Differences in position under different data combinations
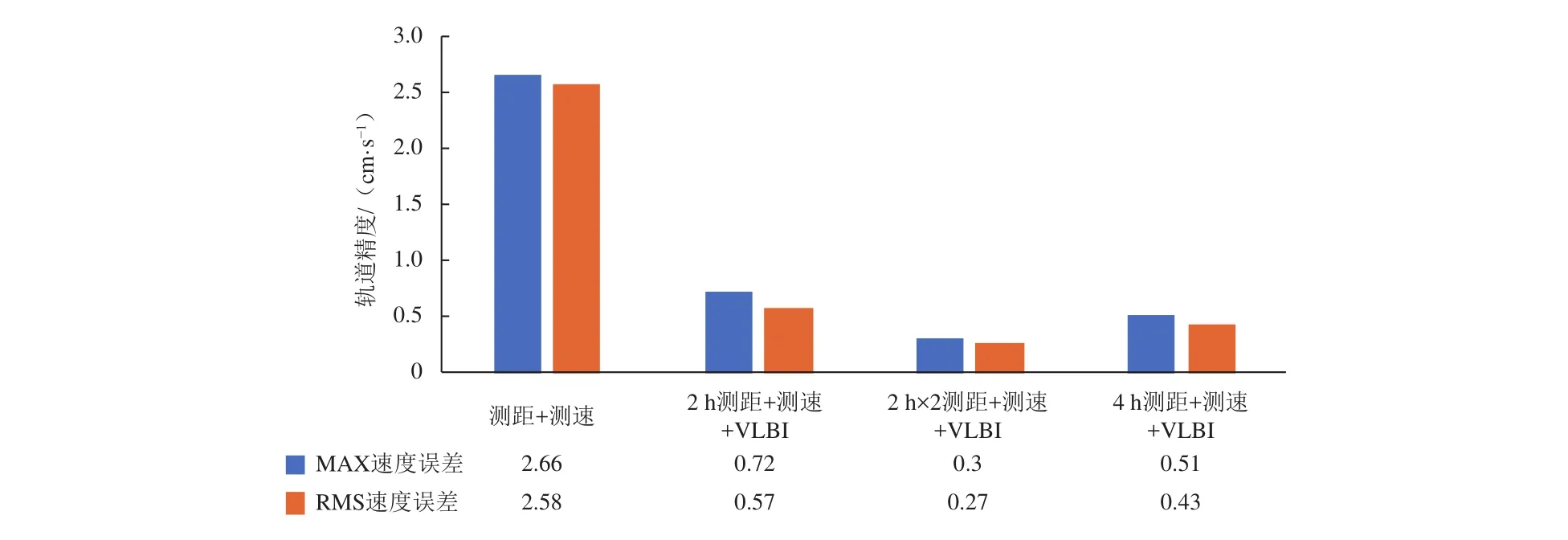
图6 不同数据组合下轨道速度差异Fig.6 Differences in velocity under different data combinations
4 结束语
本文评估了2021年1月处于稀疏观测状况下的“嫦娥四号”中继星绕地月L2点的轨道精度。基于中国VLBI网及中国深空站的VLBI时延、时延率、测距和测速数据对“嫦娥四号”中继星定轨,挑选非变轨时段,重叠弧段评估轨道精度。重叠弧段不包含观测数据时,轨道精度优于2 km;重叠弧段仅包含测距、测速数据时,轨道精度优于1.4 km;重叠弧段包含VLBI时延、时延率数据时,轨道精度达到百米量级。“嫦娥四号”中继星精轨测距、测速、时延和时延率残差分别为1.05 m、0.75 mm/s、0.15 ns、0.5 ps/s。VLBI数据的加入能显著提高“嫦娥四号”中继星绕L2点轨道精度。在有VLBI数据的前提下,测距和测速数据的覆盖率越高,轨道精度越高。当测距测速数据覆盖率相同时,分段安排深空站观测时间,能有效提高“嫦娥四号”中继星轨道精度。
