一种无刷直流电机模糊自适应控制方法
2022-04-07宋丽君
宋丽君 王 燕
(洛阳理工学院电气工程与自动化学院,河南 洛阳 471023)
无刷直流电机(brushless direct current motor,BLDCM)具有功率大、效率高、体积小和调速性能良好等特点,因而在航空、航天、兵器、工业和伺服系统等领域得到了广泛应用。然而,BLDCM 是一个复杂系统,其内部变量众多、非线性特性明显,很难对其建立高精度的动态数学模型[1]。
模糊控制因模拟人类经验、知识、判断和推理过程,可用于难以建立数学模型的控制对象,故在BLDCM 控制中得到了广泛应用[2-5]。然而,模糊逻辑控制器(fuzzy logic controller,FLC)的性能是由隶属度函数和模糊规则决定,但隶属度函数和模糊规则的建立、调试需要由该领域的专家根据经验知识手动完成,主观性较强;且控制对象不同,FLC的隶属度函数和模糊规则也不相同。为此,研究如何自动生成FLC 便成为BLDCM 中的研究热点。
自动设计FLC 主要分为3 种类型[6],第一类是FLC的隶属度函数已知,对模糊规则进行自动生成和优化[7];第二类则是FLC的模糊规则已知,对隶属度函数进行自动生成和优化[8];第三类是同时对FLC的隶属度函数和模糊规则进行自动生成和优化。目前,随着遗传算法(genetic algorithms,GA)、粒子群算法等进化算法的快速发展,同时生成FLC的隶属度函数和模糊规则已普遍应用[9-11]。
然而,在上述工作中,为自动生成FLC 多采用等腰三角形作为隶属度函数,导致FLC 论域的覆盖程度不足。FLC的隶属度函数、模糊规则个数也多为固定值,不能更好地体现FLC的自适应性。且由于同时需要对隶属度函数的模糊规则进行优化,导致染色体长度较长,造成运算的复杂性增加。
为解决上述问题,本研究提出一种基于GA 自动生成FLC的方法,可自主选择隶属度函数、模糊规则的数量,减少染色体长度,快速自动生成FLC。
1 BLDCM 工作原理
为了简化分析,对无刷直流电机作以下假设:
(1)忽略磁路饱和,不计涡流和磁滞损耗。
(2)不考虑电驱反应,气隙磁场分布为梯形波,平顶宽为120°。
(3)忽略齿槽形状效应,三相绕组完全均匀分布。
(4)驱动器中逆变电路的开关功能器件均具有理想开关特性。
由此得到无刷直流电机的相电压方程为式(1):

其中:U表 示该相电压,V;R为 相电阻,Ω;L为相电感,H;M为与其他相的互感,M;e为该相的反电动势;i为该相电流。
电机的电磁转矩如式(2)所示:

其中:Te为电机电磁转矩,ω为电机机械角速度。
电机的运动方程如式(3)所示。

其中:Tl为外部负载,J为电机转动惯量,B为电机粘滞系数。
2 模糊自适应PID 控制器设计
2.1 模糊自适应PID 控制
PID 控制由于其原理简单,算法易于实现,可靠性高、鲁棒性好等优点,得到了广泛应用。然而PID控制需要获得被控对象的精确数学模型,对于非线性系统控制效果不好,PID 参数确定后无法更改。同时BLDCM 是一个非线性、强耦合系统,自身参数、负载及被控对象等时变性强、使得PID 控制在BLDCM 控制中的效果并不是十分理想。为此将FLC 引入BLDCM的PID 控制(称为模糊自适应PID控制),利用FLC 来对PID的输出进行实时在线调整,可有效提高对BLDCM的控制性能[12]。
模糊自适应PID 控制的基本思想是根据BLDCM的误差E和误差变化率Ec作为FLC的输入量。在运行过程中,对E和Ec的变化进行实时检测,依照模糊控制原理对PID 进行实时调整。此时PID的输出kp、ki和kd应为:

其中:kp0、ki0和kd0为PID 控制器的原始数值;Δkp、Δki、Δkd为FLC的输出调整数值。图1 所示为模糊自适应PID 控制示意图。

图1 模糊自适应PID 控制示意图
2.2 隶属度函数的设计
隶属度函数是模糊化过程中将精确量映射到各个模糊集合论域的重要环节。隶属度函数的种类很多,其中三角型隶属度函数表达式最为简单,所需优化变量少而在自动生成FLC 中得到广泛应用。但以往工作多将隶属度函数数量固定为7 个,二输入三输出的FLC 中所有隶属度函数的优化位数需要25 个。
隶属度函数数量固定后,模糊规则的数量也随之固定,不利于更好地体现FLC的优越性。且每个隶属度函数需要优化位数较多,给优化造成一定困难。
为此,本研究采用文献[13]的隶属度函数优化方法。可大大减少需要优化变量个数。以一个输入为例,仅需对2 个变量个数进行优化,分别用于确定隶属度函数的个数和各隶属度函数的分布情况。如此,对于二输入三输出的FLC,其隶属度函数需要优化的个数仅需要5×2=10。
2.3 模糊规则的设计
模糊规则与隶属度函数的数量息息相关,以往自动生成FLC 中对于模糊规则多采用字符串编码,用不同数字代表不同的模糊规则,交由优化算法进行优化。如两个输入中隶属度函数个数均为7,则模糊规则有49 条,需要147 位编码。
同理选用文献[13]的模糊规则优化方法,模糊规则中仅需对模糊规则的分布情况进行优化。则二输入三输出的FLC 中模糊规则的优化位数仅需5 位。
3 利用GA 自动生成FLC
3.1 基于GA 生成的模糊自适应PID 控制器
在利用GA 自动生成FLC 时,除前面所述的FLC 外,还需要对输入的比例因子Gc、Gec和输出的量化因子Gp、Gi和Gd进行优化,以确保精确数值能够通过比例因子准确落在FLC的隶属度函数工作范围内。量化因子则是相反,需要将输出的隶属度函数转化为精确数值,以实现对PID的自适应调整。图2 所示为利用GA 自动生成的模糊自适应PID 控制器示意图。
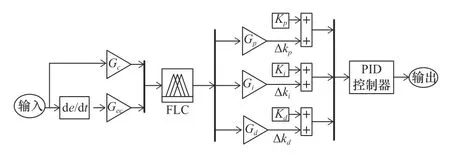
图2 利用GA 自动生成的模糊自适应PID 控制示意图
3.2 GA 编码规则
依据前述可知,对于模糊自适应PID 控制器这个二输入、三输出的FLC,需要对输入和输出中隶属度函数的数量、隶属度函数的分布情况和模糊规则的构成情况,还有2 个比例因子和3 个量化因子进行优化。采用实数编码的情况下,则对应FLC所需要的染色体的个数为5+5+5+5=20。
3.3 适应度函数
采用误差绝对值时间积分性能指标作为GA 生成FLC 参数选择的适应度函数。GA 算法中目标函数的选取非常重要,决定了算法能否达到预期控制目标,这里选取式(5)作为目标函数,在式(5)中加入u(t)的平方项,可以有效防止控制量过大。选用下式作为参数选取的最优指标函数。

式中:e(t)为 无刷直流电机被控量的误差;u(t)为无刷直流电机的输入量;tu为上升时间;w1、w2和w3为权值,分别取0.999、0.001和2.0。
无刷直流电机速度控制中一般不希望出现超调量,把超调量引入目标函数中,可以有效控制电机速度超调量,目标函数(5)就转化为新的目标函数(6),如下式所示:

式中:ey(t)=y(t)-y(t-1),y(t)为 被控对象输出。w4为权值,且w4≫w1,w4取值为100。
3.4 选择机制
为避免GA 进化时相同染色体过多导致早熟,采用无回放余数随机选择和最优保存策略相结合的选择机制。可确保每一代种群中比平均适应度大的染色体能够遗传到下一代种群中,同时每一代适应度最高的染色体也可以遗传到下一代种群中。
3.5 交叉和变异运算
交叉和变异运算是GA的重要环节,但由于以往交叉因子pc和变异因子pm多为固定值,不能自适应进行调整。为此,采用自适应交叉因子和变异因子(如式(7)、(8)所示),提高GA 运行效率。

式中:fmax、favg是当前种群的最大适应度和平均适应度值;f1为两个交叉染色体中适应度较大数值;f2为 变异染色体的适应度数值;pc1和pc2为事先设定的交叉因子,分别取0.85和0.6;pm1和pm2为事先设定的变异因子,分别取0.1和0.001。
4 仿真与验证
通过MATLAB 构建BLDCM 仿真模型,其参数为线电阻1.8 Ω,线电感为0.54 mH,额定工作电压为24 V,额定转速为800 r/min,电机反电动势系数为0.066 V/(rad/s),转矩系数为0.043 2 N·m/A,阻尼系数为0.05 N/(m/s)。
分别采用PID和模糊自适应PID 两种控制方法对BLDCM的空载阶跃进行控制,得到的结果如图3所示。
由图3 可知,模糊自适应PID 控制算法要比传统的PID 控制算法更早达到稳定,前者约为0.003 s,后者则约为0.025 s,并且模糊自适应PID 控制算法没有产生超调,而传统PID 算法则产生了约1%的超调。

图3 阶跃控制图
为测试模糊自适应PID 控制算法和传统PID 控制算法对外部负载扰动的控制效果,在0.3 s 时对电机施加了0.2 N·m的外部负载,得到的仿真结果如图4 所示。
由图4 可知,模糊自适应PID 控制算法虽然在外部负载突变的情况下,产生了稍许的超调,但很快就达到稳定控制,耗时约为0.004 s。传统PID 控制算法虽然未能产生超调,但达到稳定的时间较模糊自适应PID 算法大大增加,约耗时0.035 s。
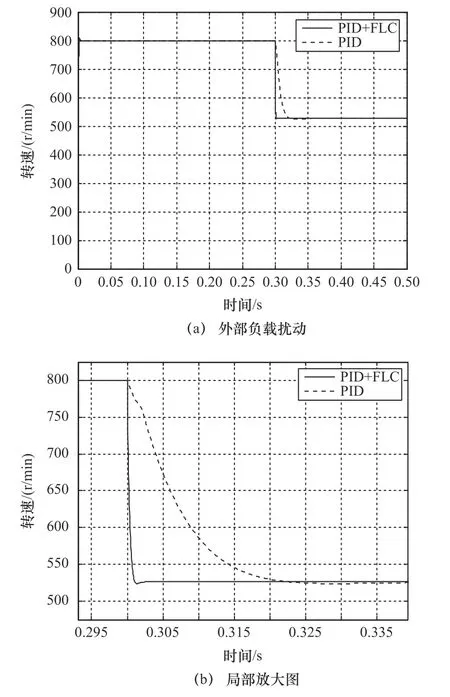
图4 外部负载扰动控制结果
5 结语
在传统PID 控制算法的基础上,通过遗传算法自动寻优和设计模糊逻辑控制器,来对PID的控制参数进行微调,以便实现模糊自适应PID 控制。较人工设计模糊逻辑器的过程,具有速度快、精度高以及不依赖人的经验等优点,并且模糊自适应PID控制的效果要比传统的PID 控制效果更好。
