螺旋桨数控抛光机结构设计及功能分析*
2022-04-07刘世豪黄鹏飞李斌勇
刘世豪 黄鹏飞 王 菲 李斌勇
(①海南大学机电工程学院,海南 海口 570228;②浙江大学机械工程学院,浙江 杭州 310027;③成都信息工程大学网络空间安全学院,四川 成都 610225)
螺旋桨叶片是船舶发动机最为关键的部件之一,具有结构复杂、种类数量多、几何造型多变、加工难度大及质量要求严格、影响航行效果等诸多特点[1],由于螺旋桨叶片的整体造型由几块较为复杂的三维曲面构成,所以传统的螺旋桨叶片加工方法难以满足螺旋桨叶片的各项加工指标要求[2]。目前国内外的船舶螺旋桨加工厂对叶片的抛光依然主要采用较为落后的手工加工方式,并且采用全自动化的抛光方法来抛光螺旋桨的工厂较少。抛光工人手工抛光螺旋桨,体力消耗非常大,而且存在着精度不足、桨面有裂纹、加工误差超标及使用寿命短等诸多问题[3]。
随着自动控制技术和计算机技术的不断发展,具备数字化控制功能的特殊抛光机床的设计不断被提出[4-5]。本文根据螺旋桨叶片的加工工艺要求,以及叶片的不规则曲面,设计了一种专门针对船用螺旋桨叶片抛光的数控抛光机,借助数控技术自动完成螺旋桨抛光的工作,解决了螺旋桨抛光难的问题。
1 螺旋桨数控抛光机结构设计原理
1.1 设计要求与原则
数控机床按照预先编辑好的程序进行加工,在工作过程中无需人为干涉[6],因此对于数控机床的结构精度要求极高、并且可以做到在高强度的工作环境下持续稳定地完成各项加工任务,以满足所需的各项加工指标。首先,从螺旋桨的加工工艺所需的各项指标和要求作为突破口,同时结合螺旋桨的尺寸、造型和相对位置等有关参数,从而确定数控抛光机的工作方式以及其各个主要零部件之间的相对工作关系和达到指标所需的配置条件;其次,全面多角度考虑数控抛光机的外部设计因素,例如外观形状、生产流程及保养维护等许多问题,对数控抛光机综合布局进行一系列的整体优化。因为船用螺旋桨需要满足高质量的加工需求,所以在设计数控抛光机时,必须遵循精度高、结构简单及刚度高等原则[7]。
1.2 螺旋桨加工工艺要求
船用螺旋桨与航空螺旋桨叶片的区别在于其螺旋桨叶片的中间部位造型为鼓形,边缘部位相对厚许多。此外,大型船用螺旋桨的体积十分庞大,整体加工的时间较长。船用螺旋桨主要由桨毂和叶片两部分组成,桨穀的造型为近似于锥型,叶片的数目一般由3~5 个不等,都以桨毂为中心均匀地分布在其周围,发动机通过使螺旋桨旋转而产生相应的推力。螺旋桨叶片对着船舶尾部的一面称为叶面,对着船舶头部的一面称为叶背;当螺旋桨转动的时候,螺旋桨叶片先进入水的一边称为为导边,之后进入水的一边称为随边[8],船用螺旋桨结构的组成如图1 所示。

图1 船用螺旋桨叶片
船舶航行一般需要很大的动力,而螺旋桨在产生巨大推力时往往会产生剧烈振动,并且也会受到十分复杂的合力[9]。因此,对于加工螺旋桨来说,必须保证其表面不能有任何裂痕或划痕,还要满足较高的加工精度。因此,螺旋桨的精密加工有以下要求:螺旋桨表面粗糙度值小于或等于3.2 μm,局部螺距误差不能高于2.0%,截面螺距误差不能高于1.5%,平均螺距误差不能高于1.0%[10]。
1.3 螺旋桨数控抛光机整体规划
在设计螺旋桨数控抛光机时,本着满足功能强大、效率高以及环保节能等诸多要求,对数控抛光机按照相应的功能,划分成电气系统、抛光机器和数控系统三大模块进行研究设计,如图2 所示,最后用完整的程序将三大模块相互联系,形成一个可以实现制定加工任务的有机整体。

图2 数控抛光机模块组成
此外,在满足基本设计原则的前提下,要实现数控抛光机的设计最优化还需符合以下要求:
(1)尽可能实现全通用。由于需加工的螺旋桨种类繁多,因此数控抛光机的设计需要做到满足大部分甚至全类型的螺旋桨的抛光工序。
(2)尽可能实现全自动化。随着数控抛光机自动化程度的不断提高,在螺旋桨抛光过程中,工人可以最小程度干预其中,这样不仅降低了人工成本,而且可以减少人为因素而产生的加工误差。
(3)尽可能增加外部拓展性。由于数控抛光机无论是设计过程还是制造过程,都需要花费大量时间、人力以及物力,因此在设计数控抛光机的过程中,尽可能考虑到增加外部可拓展的能力,这样即使当加工过程中需要增加工序来实现加工的多样化,也可以通过外部拓展来实现相应的功能,将时间和成本降到最低。
2 螺旋桨数控抛光机传动系统设计
2.1 传动机构的设计
对于螺旋桨数控抛光机,选择合适的传动机构至关重要。常见的传动机构有齿轮传动、带传动、蜗轮蜗杆传动和丝杠螺母传动等[11]。作为传动方式之一,丝杠螺母传动机构有着诸多优势和竞争力:丝杠螺母传动传动效率很高,平均可达到0.93~0.97,是其他传统传动机构的的2 倍,甚至可达到4 倍;丝杠螺母传动之间配合紧密,在运行过程中不会产生很大的热变形及振动,平均使用寿命可以达到传统传动机构的10 倍左右;丝杠螺母机构的高速性能十分强,在满负载工作状态下,也可实现高达120 m/min 高速驱动的线速度;丝杠螺母传动机构可将旋转运动转化成直线运动,也可以做到将直线运动转化成旋转运动,具有传动可逆性,并且正向传动效率与逆向传动效率基本相同[12]。
综上,本文设计的数控抛光机选择采用了丝杠螺母传动机构,来实现砂轮抛光臂相对于加工对象的移动,如图3 所示。

图3 丝杠螺母传动机构
2.2 伺服电机的选择
本文设计的数控抛光机的传动机构为丝杠螺母传动,选择稳定、动力足的驱动电机是保证整个传动系统达到设计要求的关键。机械传动的驱动电机主要有直流电机和交流电机,由于我国供电均由交流电网供电,交流电机不需要使用直流电源或者转换器也能正常工作[13],综合考虑各方面因素,本文在设计传动系统时选择交流电机为动力源。
目前市面上的伺服交流电机种类繁多、功能强弱不一,经过比较和筛选,决定选择三菱品牌中的HG-KN 系列伺服交流电机。该系列的伺服电机精度高,实现了闭环控制;转速高,额定转速高于其他伺服电机;适应性高,可以适应高负载和瞬间过负载的场合;稳定性高,运行稳定流畅,工作噪声小;反应速度快,能在短时间内对控制命令做出反应。
2.3 连接装置的选择
在数控抛光机的工作过程中,丝杠和伺服电机连接可靠是保证整个传动系统稳定运行的重要环节。目前,伺服电机与丝杠的可动连接方式分为联轴器、齿轮和同步带3 种。在设计过程中,只要距离足够,首先选择联轴器连接。市场上联轴器的品种多样,有机械式、电磁式及液压式等许多类型[14],但是机械式联轴器的应用范围最广,其通过借助机械构件夹紧后所传产生的相互作用力来传递动力,由于本文设计的传动系统满足距离足够的条件,综合考虑多种条件后选择使用机械联轴器将丝杠与伺服电机连接。
3 螺旋桨数控抛光机关键部件设计
3.1 砂轮抛光臂结构设计
对螺旋桨抛光加工而言,主要采用砂轮和砂带[15-16]两种加工方式,砂轮动力足、可以形成较大的磨削力,砂带动力小、但是抛光程度高。由于本文设计的数控抛光机的加工对象是船用螺旋桨,所需磨削力较大,因此抛光臂采用了砂轮来完成整个设计。砂轮抛光需要足够的动力以及合理的传动方式,齿轮传动有较高的传动精度、运行持续稳定,但成本很高,此外需要保持好的润滑条件,所以不合适在有很多灰尘以及很远距离的两传动轴之间使用[17];带传动结构简单、易保养维修,制造及安装成本都较低,并且具有非常好的弹性以及挠性,在工作过程中能减小振动和噪声,使机床运行平稳,适合中心距稍大的传动,并且在运行过载时可以保护零部件不被损坏;链传动可以实现传动的平稳,并且传动效率较大,但是链传动在运行过程中,不能一直保持恒定的瞬时传动比,不适合在急速反向的传动中使用。对比上述传动方式的优缺点后,本文设计的砂轮抛光臂采用带传动方式。
如图4 所示,整个砂轮抛光臂以中间支架为主要载体,支架前端连接的是砂轮机构,后端连接的是旋转电机,最后整个砂轮抛光臂通过圆形底座与数控抛光机主体相连。支架中间安装一个小型高速旋转电机,通过旋转驱动所连接的齿轮一起转动,接着在皮带的连接作用下,砂轮机构的齿轮一起同步转动,砂轮机构将砂轮和齿轮通过砂轮轴和轴承连接在一起,可在减小振动和摩擦的同时,使砂轮获得较大动力,来完成相应的抛光任务。

图4 砂轮抛光臂整体结构
3.2 旋转工作台结构设计
在设计旋转工作台时,考虑到要使螺旋桨可以转动到目标位置,让砂轮抛光机构完成抛光任务,设计了几种参考方案,最终选择了大功率电机直接带动夹紧机构,驱动螺旋桨转动。
整个旋转工作台主体由平台支架和工作台面组成,在支架的中间位置是一个可以承受大载荷的电机座,因为需要承受旋转电机和螺旋桨的一部分重量,所以需要做到加固处理。旋转电机的顶部与转轴相连,转轴的上端有一个螺旋桨夹紧装置,最后整个旋转机构固定在电机座上。当进行抛光加工时,将螺旋桨放置在工作台上,夹紧装置与螺旋桨桨毂互相固定,然后旋转电机运行,带动螺旋桨转动,此外螺旋桨底部需要添加润滑油,保持和工作台面之间的润滑,旋转工作台结构如图5 所示。
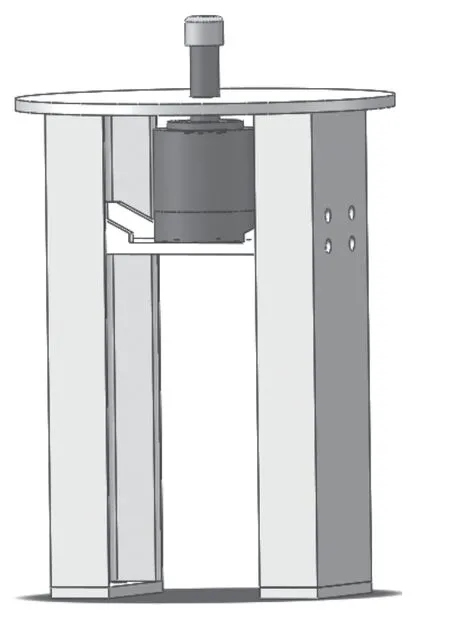
图5 旋转工作台结构
4 螺旋桨数控抛光机建模及分析
在完成上述设计的基础上,为了尽量满足通用性,本文采用数控机床标准坐标系来确定螺旋桨在各个方向的位置坐标、抛光机器换抛光头点、参考点等,从而确定螺旋桨和数控抛光机之间的相对位置关系,获得各项加工所需的数据信息。数控机床标准坐标系采用的是右手直角笛卡尔定则[18],如图6所示。

图6 数控机床标准坐标系
本文设计的螺旋桨数控抛光机使用五轴四联动[19-20]来完成抛光螺旋桨的任务,采用X轴、Y轴、Z轴3 个基本坐标轴实现控制抛光机器相对于待加工螺旋桨的前后、左右、上下的移动;然而仅只使用3 个直线坐标轴,显然无法满足具有复杂扭转曲面的螺旋桨的抛光任务,所以必须增设B轴、C轴2 个旋转坐标轴,使砂轮可以适应螺旋桨的曲面加工,达到更高的抛光精度,该型螺旋桨数控抛光机的各项技术参数具体如表1 所示。

表1 螺旋桨数控抛光机技术参数
完成结构整体设计、关键零部件及其功能设计后,最终设计得到的数控抛光机整体结构如图7所示。

图7 数控抛光机整体结构
抛光砂轮连接在旋转电机上,两者固定在Y轴滑板上,可以沿着Y轴完成上下移动;Y轴立柱与Z轴滑板固定在一起,可以沿着Z轴完成前后移动;砂轮抛光臂和Y轴立柱连同Z轴滑板整体一同安装在X轴滑板上,可以沿着X轴完成左右移动。
螺旋桨通过旋转工作台上的夹紧装置,使其与旋转工作台相互固定,然后旋转工作台旋转可以带动螺旋桨一起转动。当数控抛光机开始抛光加工时,X、Y、Z轴3 个直线坐标轴和B、C轴2 个旋转坐标轴互相运动,使抛光砂轮可以到达螺旋桨需要抛光的任何位置,来执行对任意结构形状的船用螺旋桨的抛光加工。
该型螺旋桨数控抛光机样机研制后,进行了一种螺旋桨毛坯的试加工,毛坯材料为锰青铜;采用五轴联动加工方式对螺旋桨毛坯进行抛光,为了提高抛光精度和效率,按照螺旋桨的型面几何特征编写了相应的加工代码,并严格按照加工精度指标要求,运用数控系统对整个过程进行实时监测和校正,尽量降低外部因素对抛光精度的影响。在完成螺旋桨数控抛光后,对螺旋桨的几何参数和精度指标进行了检测,结果如表2 所示,分析表2 可知:螺旋桨的几何型面特征符合设计要求,表面粗糙度满足船用螺旋桨的航行要求、即划痕较小,从而有利于降低螺旋桨在海水中受到的阻力;这说明所研制的螺旋桨数控抛光机具有较好的加工功能。

表2 螺旋桨抛光质量指标对比
5 结语
本文针对船用螺旋桨的整体结构特点,提出了数控抛光机结构设计方案,包括砂轮抛光臂的结构设计,旋转工作台的结构设计,并进行了传动系统的设计,确定了传动机构、伺服电机及二者的连接方式,在此基础上设计了一种新的螺旋桨数控抛光机。该数控抛光机解决了船用螺旋桨抛光难的问题,有利于大幅提升螺旋桨叶片的抛光精度、使用寿命等基础性能,并减少所需人力及减小人工抛光强度。
