基于多容惯性标准传递函数的PID控制参数整定方法在Boost 变换器中的应用
2022-03-30郭海聪王召朋江先阳
郭海聪, 容 源, 王召朋, 江先阳
(武汉大学物理科学与技术学院物理国家级实验教学示范中心,湖北 武汉 430072)
0 引 言
PID控制器是一种线性控制器,一直以来是工业生产过程中应用最广、最成熟的控制器,对工程系统的优化具有重要意义[1]。PID控制器对系统性能的控制作用主要由整定参数所决定。传统的PID参数整定方法需要大量的优化仿真实验,参数整定困难;并且基于传统整定参数的PID控制器难以使被控系统达到最优的控制品质[2]。常用的PID控制器参数整定方法有:Ziegler-Nichols方法(ZN法)、临界比例度法、经验试凑法、频域分析法、根轨迹法等。Z-N法和临界比例度法在实际生产过程中,很难找到合适的参数整定区间,频域分析法和根轨迹法方法复杂且适用范围有限,并且这些方法对系统设计人员有专业经验要求,参数整定难度大[3]。文献[4]提出了一种新型标准传递函数——多容惯性(multiple capacity process, MCP)标准传递函数。基于MCP标准传递函数的PID控制器(MCP-PID)被证实具有无超调、不限制系统阶数、不限制系统型次、高鲁棒性等特点[5]。
Boost变换器,是6种基本斩波电路之一,在电力电子领域占据重要地位。随着新能源的使用,人们对Boost变换器的性能提出了更高的要求,频率、集成度、效率更高,成本更低,体积更小。Boost变换器数字控制器以其开发周期短、成本低、易于实现复杂算法、灵活性高等特点在电力电子领域迅速发展。目前Boost变换器数字控制器部分难点之一是PID参数整定工作周期长,对技术人员经验要求很高。
本文基于上述理论,将基于MCP标准传递函数的PID参数整定引入Boost变换器,提出一种新的参数整定方法。这种方法将MCP标准传递函数与Boost变换器开环传递函数相结合,对Boost变换器进行环路补偿,整定PID参数。通过在Simulink进行仿真实验,并和传统参数整定法做对比,采用提出方法整定获取参数的Boost变换器的效率提升,响应时间极大缩短,证实了基于MCP标准传递函数PID参数整定方法比传统参数整定法更有优势。
1 Boost变换器的基本原理
图1为Boost变换器基本原理图[6],其中Vin表示Boost变换器的输入电压,Vout为Boost变换器输出电压,L为电感, S1、S2为开关,C 为电容,R为负载电阻。Ton表示 S1闭合、 S2打开的时间,Toff表示 S1打开、 S2闭合的时间,Ts表示一个周期,于是有Ts=Ton+Toff。

图1 Boost变换器基本原理
对于Boost变换器,通常有3种工作模式:连续导通工作模式(continuous conduction mode, CCM)、断续导通工作模式(discontinuous conduction mode,DCM)和临界导通工作模式(boundary conduction mode, BCM)。为了简化对Boost变换器的分析过程,本文假设所有器件均为理想器件,并且以Boost变换器在CCM工作模式下的工作状况为例来引入参数整定方法。
在CCM工作模式下,Boost DC-DC 变换器在每个开关周期均有两个工作状态,分别为:工作状态 1(0-Ton) : S1闭合、 S2打开,电感 L充 电,电容 C 放电;工作状态 2(Ton-Ts): S1打开、 S2闭合,电感 L放电,电容 C充电。
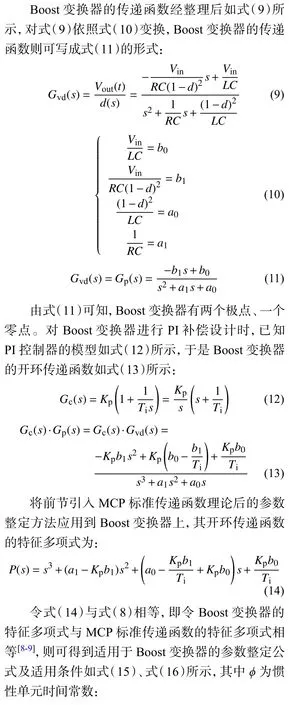
根据Boost电路的不同工作状态,利用状态空间平均法可以得到其在CCM下的传递函数为:

其中d为输入电压矩形波的占空比。
2 MCP标准传递函数PID参数整定及其应用
PID控制器性能的优劣决定了整个被控系统性能的优劣。已知,PID的参数整定决定了PID控制器的性能,这也就决定了PID参数Kp(比例增益)、Ti(积分时间常数)、Td(微分时间常数)整定工作至关重要。
图2是典型串联校正型控制系统结构图。其中Gp(s)为被控过程,Gc(s)为控制器(在本文中,取控制器为PI控制器),e(t)为偏差量,u(t)为控制量,r(t)和y(t)分别为系统的输入和输出。根据PID控制器理论[3]和图2可知,系统总的传递函数为 Φ (s),如式(2)所示。将系统中Gp(s)和Gc(s)用分式函数表示,如式(3)、式(4),那么系统的总传递函数如式(5)所示[7-8]:

图2 典型串联校正型控制系统

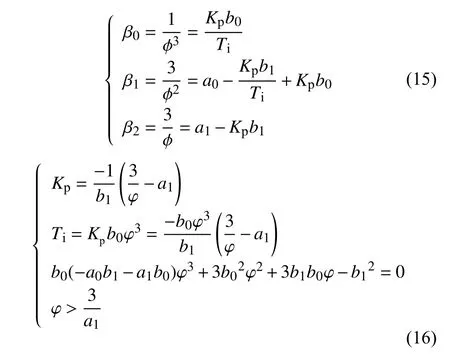
将MCP标准传递函数理论[7]引入,对应的MCP标准传递函数的特征多项式为:

其中,βn-1,βn-2,···,β1,β0均为常系数。
引入后,要求PI控制器的极点与MCP标准传递函数的极点相同,即令式(7)和式(8)相等,则可得到一组参数表达式,进而可求得所需要的参数值。
3 面向Boost变换器的MCP-PI参数整定方法
4 电路仿真与验证
依据前面的参数整定方法引入,在Simulink平台上搭建了面向Boost变换器的PID仿真模型[10],如图3所示。其中,Vin、L、Diode、MOSFET、C、R组成了Boost变换器的主拓扑;Gain 、Vref、Add 、PID、PWM波生成模块等组成了Boost变换器的数字PID控制回路。工作过程为:输出电压Vout和参考电压Vref经过Add模块得出误差值,误差值输入到PID模块参与PID控制算法计算得出特定的占空比信号,这个占空比信号经过PWM波生成模块处理,可以得到能够驱动MOSFET开关的信号,进而完成对Boost变换器的PID控制。Diode是二极管,MOSFET是开关管,I1、I2分别是测量输出和输入电流的电流表,V1、V2分别是测量输入和输出电压的电压表。

图3 面向Boost变换器的PID仿真模型
目前已查阅到的适用于Boost变换器PID控制器参数整定方法有Ziegler-Nichols临界振荡法(ZN法)、临界比例度法、经验试凑法、频域分析法等[2]。
临界比例度法是仅在P作用下,调整比例度使系统出现等幅振荡,然后根据公式[2,11]算出PID值。经验试凑法是根据经验,“先调整比例参数,接着调整积分系数,最后调整微分系数”。这两种方法和提出方法相比,需要丰富的控制理论和控制回路参数整定经验,以及反馈控制理论。若实验者没有丰富的知识和经验做支撑,利用这种方法整定的系统很难收敛。
通过基于MCP标准传递函数参数整定法和频域分析法得到两组参数,将两组参数分别代入PID模型进行仿真实验。仿真实验数据来源于文献[12]:输入电压5 V,输出电压10 V,电感L为250 μH,电容C为66 μF。实验设置条件:开关频率200 kHz,负载在 0~0.03 s为20 Ω,在0.03 s时,负载发生突变,下降为原来的75%。仿真实验结果如图4~图6所示。根据效率公式η=输出功率/输入功率,可以得到两种不同参数整定法整定的Boost变换器的效率;根据功率公式P=UI,可以得到Boost变换器的输出功率。

图4 两种不同的参数整定法整定的Boost变换器输出电压

图5 两种不同的参数整定法整定的Boost变换器输出电流

图6 两种不同的参数整定法整定的Boost变换器输出功率
输出电压结果分析如下:
1)当负载为 20 Ω 时(0~0.04 s)时,基于多容惯性标准传递函数参数整定法整定的Boost变换器输出电压经0.024 7 s稳定,稳定值为9.997 V;基于频域分析参数整定法整定的Boost变换器输出电压经0.039 7 s稳定,稳定值为9.858 V。
2)当负载突变为原来的75%时,基于多容惯性标准传递函数参数整定法整定的Boost变换器输出电压经15.186 ms再次稳定,稳定值为10.01 V;基于频域分析参数整定法整定的Boost变换器输出电压经10.508 ms再次稳定,稳定值为9.991 V。
输出电流结果分析如下:
1)当负载为 20 Ω 时(0~0.04 s)时,基于多容惯性标准传递函数参数整定法整定的Boost变换器输出电流经0.024 7 s稳定,稳定值为0.500 1 A;基于频域分析参数整定法整定的Boost变换器输出电流经0.039 7 s稳定,稳定值为0.495 2 A。
2)当负载突变为原来的75%时,基于多容惯性标准传递函数参数整定法整定的Boost变换器输出电压经15.186 ms再次稳定,稳定值为0.666 3 A;基于频域分析参数整定法整定的Boost变换器输出电压经10.508 ms再次稳定,稳定值为0.666 1 A。
输出功率结果分析如下:
1)当负载为 20 Ω 时(0~0.04 s)时,基于多容惯性标准传递函数参数整定法整定的Boost变换器输出功率经0.024 7 s稳定,稳定值为5.001 W;基于频域分析参数整定法整定的Boost变换器输出电压经0.039 7 s稳定,稳定值为4.965 W。
2)当负载突变为原来的75%时,基于多容惯性标准传递函数参数整定法整定的Boost变换器输出电压经15.186 ms再次稳定,稳定值为6.669 W;基于频域分析参数整定法整定的Boost变换器输出电压经10.508 ms再次稳定,稳定值为6.668 W。
仿真结果数据对比如表1所示。

表1 Boost变换器PID控制仿真结果
由表1 和图4~图6可知,和常用的频域分析法对比,采用MCP标准传递函数参数整定法后,对Boost变换器能起到很好的控制作用,超调更小、响应更快。当负载发生变化时,仍然能很好地稳定输出电压,抗干扰性强。
5 结束语
面向Boost变换器,针对其PID控制器存在的参数整定困难和用传统参数整定法整定后的输出电压稳定性不强和抗干扰性不佳等问题,提出了一种新的参数整定设计方案。这种方案基于多容惯性标准传递函数理论。通过在Simulink平台上的仿真实验,证实采用提出方法整定获取参数的Boost变换器的效率达到了98.35%,并且获取参数的工作量小、计算难度较低,和频域整定法相比较,基于MCP-PI方法设计的Boost变换器输出电压,上升时间更快,降低超过一半,超调更小,综合分析,优于其他方法。
Boost仿真实验考虑了实际工程中存在的感抗、容抗,以及数字控制部分的输出电压数据采样与处理问题,实验结果表明该方法能应用于实际工程中,给实际Boost变换器工程应用的控制器设计提供了新的设计思路,在实际应用中,可以采用基于MCP参数整定方法设计Boost变换器。
研究表明,面向Boost变换器,参数整定方法尤其重要,对于获得良好的电路输出有至关重要的作用,基于多容惯性标准传递函数的PID控制参数整定方法的应用有着一定的潜力。
