小波变换轮廓术测量精度影响因素的研究
2022-03-24杜连续
杜连续,金 永
(中北大学信息与通信工程学院,山西 太原 030051)
0 引言
非接触测量以其自动化程度高、成本低等一系列实用优势,逐渐成为精密测量领域的主流技术。随着计算机视觉技术的兴起和发展,用非接触式光电方法测量三维表面轮廓已成为一种必然趋势,光栅投影法是一种重要的三维测量技术[1],是通过面阵CCD相机采集待测物体表面的光栅图像,通过求解光栅图像的相位便可以得到物体的高度信息。目前,光栅投影三维测量方法主要有傅里叶变换轮廓术[2-4]、相位测量轮廓术[5-6]和小波轮廓术[7-9]等。
1980年,Morlet提出了小波变换法;2003年,Zhong等将小波变换应用到光学三维面形测量技术中,并逐渐形成了较为系统的小波变换轮廓术(WTP)[10-11]。由于WTP方法只需要1幅变形条纹图即可恢复待测物体的三维面形[12],测量装置简单更适用于实时以及动态测量,小波变换求解条纹图像的相位避免了频谱混叠问题,测量精度更高[13]。WTP通过对采集的变形条纹进行连续小波变换、定位小波脊和获取脊处相位信息等操作来解调条纹图中的相位信息,恢复出被测物体的形貌[14]。本文研究了不同因素对小波变换轮廓术测量精度的影响。
1 WTP原理
被测物体的表面轮廓可以用投影云纹法测量。图1为投影云纹法的光路。

图1 光栅投影法的光路
光栅被投射到物体的表面上,由CCD相机采集因物体表面不平坦而引起的变形图像,物体表面的轮廓可以从未变形和变形的光栅条纹中获得,投射在平面上的光栅的强度分布为
I(x,y)=A(x,y)+B(x,y)cos 2πf0x
(1)
A(x,y)为与背景光强度函数;B(x,y)为振幅强度函数;f0为光栅频率。投射在表面上的光栅的强度分布为
I′=A(x,y)+B(x,y)cos 2πf0(x-wtanθ)
(2)
w为物体高度;θ为投影光栅的入射角。
条纹阶数n与物体高度关系为
w=n/f0tanθ
(3)
当光测力学图像中的某些信号被恒定频率信号调制时,变形光栅线的光强可描述为
I(x,y)=A(x,y)+B(x,y)cos(2πf0+φ(x,y))
(4)
φ(x,y)为相位。
通过小波变换中的模极大值法得到小波脊处的相位值作为变形条纹图的相位,条纹阶数n根据相位值φ(x,y)通过式(5)计算,因此,通过式(3)可以计算离面高度,得到待测物体的轮廓。
n=φ(x,y)/2π
(5)
本文使用计算机仿真了一个球形轮廓,球形帽的半径为100 mm,球形帽的最大高度为12.5 mm,半圆形轮廓如图2所示。根据球冠的高度和式(2)对条纹图进行模拟,研究影响测量精度的因素。
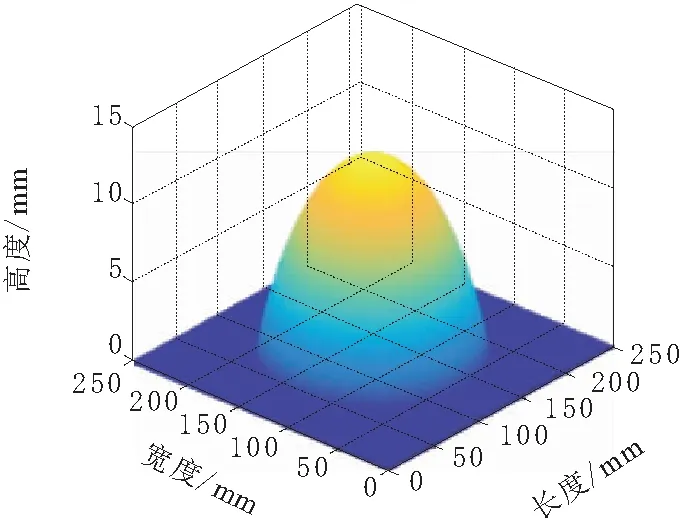
图2 半圆形轮廓
2 计算机模拟
2.1 光栅频率对测量精度的影响
根据式(2)模拟正弦光栅在不同光栅频率f0下投射到半圆形轮廓上的条纹图,投射光栅的入射角设置为30°。模拟条纹分别如图3a~图3c所示。然后通过小波轮廓术重建半圆形轮廓。提取重建结果的第128行进行比较,得到不同光栅频率在恢复图像上的误差分布,如图4所示。

图3 不同光栅频率的条纹图

图4 不同光栅频率下的半圆形轮廓误差
由图4可以看出,模拟结果在f0=0.062 5 Hz时最有利。相反,f0=0.03 Hz时误差最大。对于f0=0.125 Hz,边界的误差大于0.062 5 Hz时的误差,轮廓图的左边缘与右边缘部分误差都比较大。而f0=0.03 Hz时,整体轮廓误差都比较大,但是整体轮廓是比较平滑的。而除去边缘以外的其他部分0.125 Hz与0.062 5 Hz的误差相差不大。这是因为在频率f0=0.03 Hz时,条纹比较稀疏,条纹图中包含的相位信息少,因此重建结果不准确,显示出比较大的测试误差。f0=0.125 Hz时,条纹比较密集,使得频谱重叠,相位提取不准确,最终导致使得边界部分测量结果不准确。因此,条纹的密集程度对测量精度有很大的影响。
2.2 入射角对光栅频率的影响
根据式(2)模拟不同入射角投射到半圆形轮廓上的条纹图,频率设置为0.062 5 Hz,模拟条纹如图5所示。提取重建结果的第128行进行比较,得到不同入射角在恢复图像上的误差分布,误差分布如图6所示。
由图6可以看出,当θ=30°和45°时,误差是比较小的,当θ=60°时,测试结果整体误差比较大,而边界的测试结果受到极大的影响。可以观察到,当θ被设置为不同的值时,内部误差显示出部分差异。θ=30°的误差略小于θ=45°时的误差值,而θ=45°时的误差较θ=60°相比有了极大的改善。随着θ的增加, 条纹密度也在增加, 当θ=60°时条纹比较密
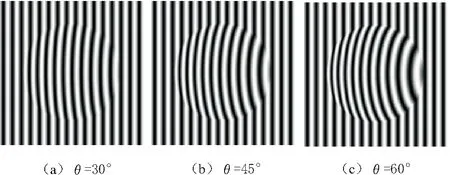
图5 不同入射角的条纹图
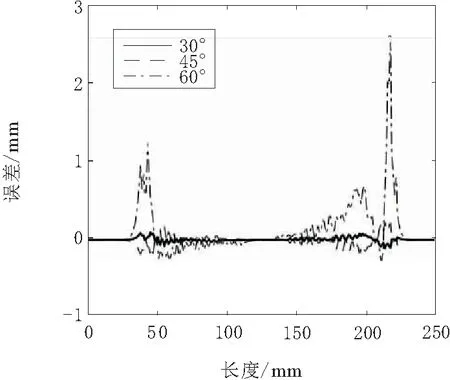
图6 不同入射角下的半圆形轮廓误差
集,因此,在这种情况下测试结果受到很大影响。如果条纹太密集,就会频谱重叠,相位提取不准确,最终导致测试结果受到影响。因此,密集条纹的密集程度对测量精度有很大的影响。
2.3 不同小波母函数对测量精度的影响
根据式(2)模拟投射到半圆形轮廓的条纹图,投射光栅的频率设置为0.062 5 Hz,入射角θ为30°,时域分布如图7所示。分别使用不同的小波母函数重建半圆形轮廓。提取重建结果的第128行进行比较,得到不同小波母函数在恢复图像上的误差分布,误差分布如图8所示。

图7 不同小波母函数时域分布

图8 不同小波母函数重建轮廓误差
由图8可以看出,复Morlet小波的模拟结果最好,除了边缘部分有些许误差之外,其他部分误差极小。复Gaussian小波的模拟结果误差略大,测试结果整体误差比较大,而Mexican hat小波误差最大,部分发生了位移,导致无法正确的重建轮廓。因此,小波母函数的选择对测量精度有很大的影响。
3 实验
本文采用经典光栅投影法[15]拍摄钢板云纹图像,投射光栅的频率设置为0.062 5 Hz,将入射角θ设置为30°。投影仪与参考平面相距600 mm。图9为拍摄到的光栅条纹图,使用小波轮廓术求得变形云纹图像的相位,然后使用枝切法[16]展开相位并且将得到的相位代入式(5),结合式(3)便可以重建钢板的三维轮廓,钢板的重建结果如图10a所示,钢板标准厚度为5 mm,本文测量厚度结果如图10b所示,可以看出使用本文方法测量误差不超过0.05 mm。
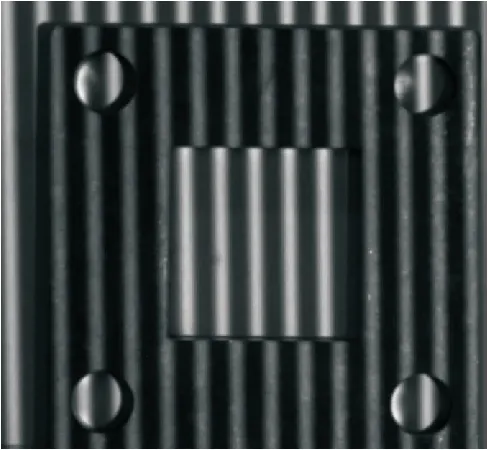
图9 光栅条纹图

图10 钢板重建结果
4 结束语
对影响小波变换轮廓术测量精度的部分因素进行了研究,使用小波轮廓术对半圆形轮廓进行一系列仿真。首先,为了考察光栅频率和入射角对测量精度的影响, 对不同光栅频率和入射角下的轮廓进行了研究。f0=0.02 Hz时,条纹稀疏,条纹图中包含的轮廓信息较少,因此显示出较大的测试误差,在频率f0=0.125 Hz时,条纹太密集,因此会影响到边界处的测量结果。随着θ的增加,条纹密集程度逐渐增加。θ=60°时,边缘处的条纹变得比较密集,因此边界测试结果受到很大影响,因为条纹太密集,会导致相邻条纹之间出现频谱混叠,边界的位移会改变。在复Morlet小波、复Gaussian小波和Mexican hat小波之中,复Morlet小波的模拟结果最好,整体误差都比较小。而复Gaussian小波的模拟结果整体误差比较大, Mexican hat小波无法正确重建轮廓。最后使用复Morlet小波对一块钢板进行重构,钢板厚度测量误差为0.05 mm。
