太阳能联产系统自抗扰功率协调控制
2022-03-23唐子慧
杨 挺,唐子慧
(智能电网教育部重点实验室,天津大 学,天津市 300072)
0 引言
为实现碳达峰、碳中和“30·60”的战略目标,以太阳能热发电(concentrating solar power,CSP)和燃气轮机联合循环(combined-cycle gas turbine,CCGT)构成的太阳能联产(integrated solar combined cycle,ISCC)系统作为一种新型太阳能利用方式,近年来得到了广泛关注[1-2]。ISCC 系统克服光热发电功率输出不稳定、蓄热系统投资成本高等固有缺点并突破燃气轮机联合循环“以热定电”工况运行约束,实现机组热电负荷可行域的扩增及供热机组的热电解耦和深度调峰[3]。此外,系统设计中太阳能直接蒸汽发生技术的应用进一步减少了额外设置蓄热装置的投资,可以有效降低发电成本[4]。
在ISCC 系统优化运行方面,文献[5]探讨了槽式太阳能热发电与燃气轮机联合循环系统的耦合方式,研究发现两系统对于控制量变化的适应性存在明显差异,两者耦合将加剧系统调节过程的不稳定性。针对此问题,文献[6]提出一种用于热电联产混合系统负载频率控制的firefly 算法,从控制器参数优化层面弥补不同发电设备的响应速度差异,但缺乏直观性且应用难度较大。在系统结构研究中,文献[7]研究了太阳能投入系统的位置及方式对整体效率的影响,但未探讨其与燃气轮机系统联合循环的响应速度问题。文献[8]在热电联产系统控制方面通过融合传统协调控制与供热抽汽调节以提升热电联产中机组对负荷变化的适应性。
现有研究从系统架构、运行控制及优化调度等角度分析了ISCC 系统的基本结构及运行策略,但还未很好地解决复杂动态过程中两子系统响应时间尺度不同的问题。因此,需要在ISCC 系统中增设控制器,并提出新的解决太阳辐射大扰动造成的功率波动问题的有效方法。对于研究对象ISCC 系统,考虑到其扰动因素固有的类型种类多、建模估计难度大、电热负荷波动存在耦合等特点,本文采用自抗扰控制(active disturbance rejection control,ADRC)方法进行针对性的控制结构设计。相比于比例-积分-微分(PID)等传统控制方法,ADRC 不依赖于扰动被控对象的精确模型即可实现较好的控制效果,利用扩张观测器的扩张状态进行实时估计,并通过反馈控制率对作用于被控对象的不确定影响因素进行主动补偿[9],可以提升在设定参数条件下ISCC 系统各工况的扰动平抑效果,降低扰动对运行过程产生的功率波动影响,实现系统整体安全稳定运行。本文所做的主要贡献如下。
首先,构建ISCC 系统数学模型,并解析ISCC系统中CSP 和CCGT 这2 个子系统差异化的惯性量本质,针对子系统响应速度存在差异的问题,提出惯性功率补偿方法以弥补此固有特性造成的生产效率低下的问题。针对ISCC 系统太阳辐射变化大和热-电负荷变化等扰动复杂的特点,本文基于电热信号不同时间响应尺度并结合负荷波动的特点设计了基于ISCC 的ADRC 控制器,可以有效降低系统电热负荷需求的波动性及外部太阳辐射的间歇性对系统稳定运行造成的不确定性影响,有效提升了动态性能和系统鲁棒性。
1 ISCC 系统及其响应速度差异分析
ISCC 系统是由太阳能集热和燃气轮机组成的联合系统,其结构如图1 所示,主要由太阳能集热场、燃气轮机、余热锅炉及汽轮发电机组成。CSP子系统和CCGT 子系统为系统提供能量,针对系统热、电负荷需求,通过调节蒸汽流量调节阀和抽汽调节阀分配系统输入侧能量,以实现ISCC 系统的能量供给及稳定运行。ISCC 系统中CSP 子系统的能量输入端详细物理过程研究可参见文献[10]。
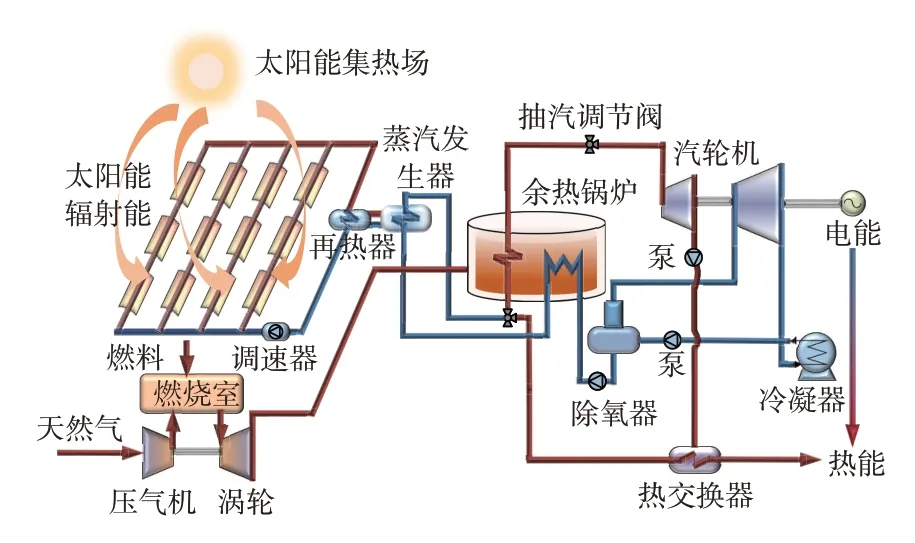
图1 ISCC 系统Fig.1 ISCC system
CSP 子系统的能量源于太阳辐射。集热器收集太阳能以加热蒸汽进而带动汽轮机做功,完成热能-机械能-电能的转换。分析集热器传热过程可以得到简化的集热器模型[11]为:

式中:Q′m为传热量;Qm为吸热量;Cm为管壁金属热容量;L为集热管长度;T2、T1、T3分别为金属管进口壁温、平均壁温、出口壁温。
由式(1)可以看出集热器输出能量随集热管导热流体流动而积聚。实际系统中集热管长度一般大于100 m[12],并且导热工质多为导热合成油[13],甚至是烷烃混合物类粘稠液体。因此,热能输出具有延时性,进而导致CSP 子系统具有时滞特性。
考虑传热过程中延时特性的影响,得到简化CSP 子系统数学模型传递函数G1(s)如式(2)所示。
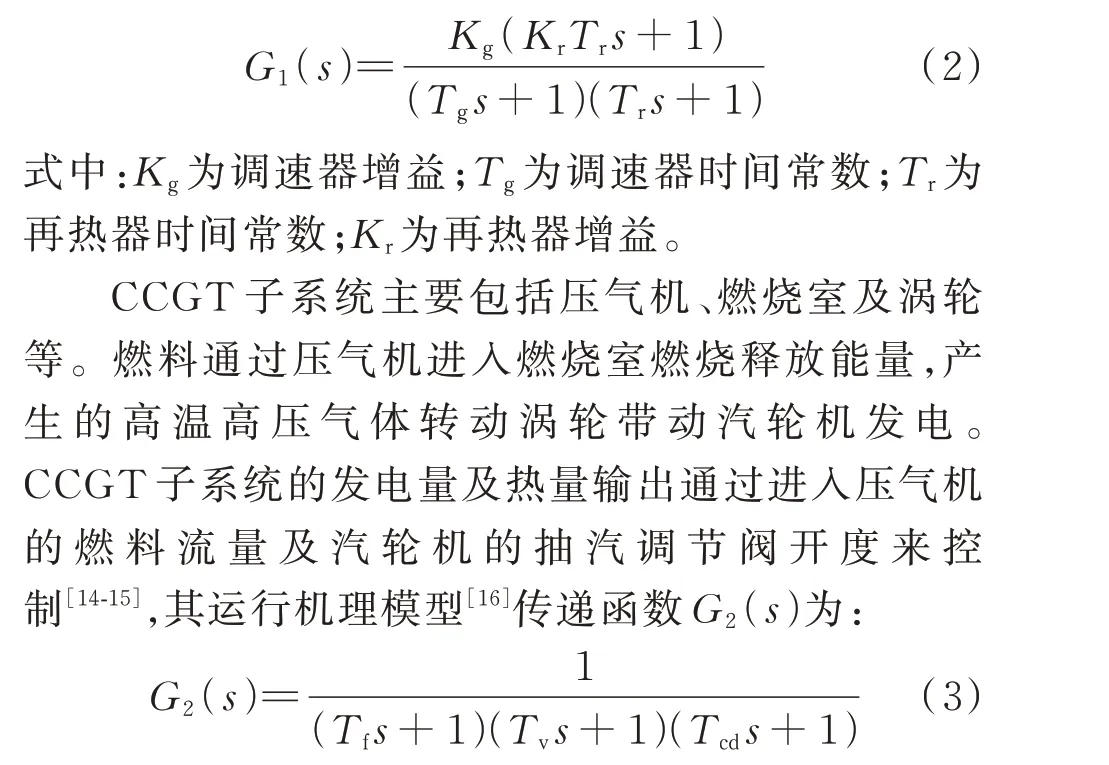
式中:Tf、Tv、Tcd分别为燃烧室时间常数、燃气轮机惯性常数和压缩机容积时间常数。
由式(3)可知,CCGT 子系统模型体现为小惯性环节的串联,燃气轮机的输出量对于给定的输入量响应迅速。通过对额定功率为100 MW 的燃气轮机的特性测试发现,调节过程在80 s 内即可完成。因此,CCGT 子系统具有较好的动态调节特性[17]。
综合以上对CSP 和CCGT 子系统的特性分析发现,2 个子系统在调节过程中的响应速度存在明显差异,CSP 子系统由于其时滞特性,难以跟随CCGT 子系统针对系统负荷需求变化进行快速反应,进而造成系统频率波动。为了提升ISCC 系统动态性能,同时维持系统的安全稳定运行,需要对两者进行功率协调。
2 ISCC 功率协调策略
2.1 ISCC 功率协调策略描述
现有热-电综合能源系统控制中的功率分配多按不同设备的额定容量比进行,虽缩短了系统的调节时间,但忽视了动态变化过程,易造成系统超调甚至振荡。因此,本文利用惯性功率补偿方法将CSP子系统所欠缺的功率通过惯性环节耦合到CCGT子系统中的控制指令上,通过燃气轮机的快速响应特性弥补由于热传递的大惯性特性造成的负荷缺额,并利用惯性环节的缓冲效果抑制系统过补偿,以满足系统负荷供需平衡及动态调节过程稳定性的双向需求。
系统惯性功率补偿策略如图2 所示。其中:Pref和Qref分别为电、热负荷需求的参考输入量;u1为蒸汽流量调节阀开度;β1表示光热系统中由太阳能集热场产生的能量经过再热器、蒸汽发生器后进入余热锅炉的比例;β2表示余热锅炉产生的能量进入汽轮机用于发电的比例;α1和α2分别为CSP 和CCGT子系统负荷调节比重,可由额定容量确定;ΔQ(s)为余热锅炉环节未进入汽轮机发电环节的热量和太阳能热发电未被余热锅炉采集到的热量之和。电热负荷波动及外部太阳辐射变化所造成的扰动ω1(t)和ω2(t) 在ISCC 系统输入端被具有抗扰特性的ADRC 控制器所平抑。时间常数为T的惯性功率补偿环节对CSP 及CCGT 子系统进行功率优化分配,以弥补CSP 大时滞特性对系统响应速度的影响。随后经2 个子系统,混合蒸汽进入余热锅炉(增益为Kt,惯性常数为Tt,由CSP 子系统进入的蒸汽能量为Ppv,由CCGT 子系统进入的蒸汽能量为Pgas)。经抽汽调节阀u2调节,余热锅炉部分能量进入汽轮机进行发电(汽轮机增益为Kp、惯性常数为Tp)。最终,系统输出的电热有功和无功功率分别为P和Q。

图2 惯性功率补偿策略Fig.2 Strategy of inertial power compensation
2.2 ISCC 系统惯性功率补偿空间模型
考虑到发电侧电能、热能的供应平衡和需求侧电热转换导致热电耦合的影响,以及实际系统中的参数摄动,建立计及热电耦合的ISCC 系统模型,其状态空间方程为:

式中:x为状态变量矩阵;u=[u1,u2]为控制量组成的矩阵,其中u1为蒸汽流量调节阀、u2为抽汽调节阀;ω=[Δp,Δq]T表示系统中电、热负荷波动量Δp和Δq组成的矩阵;A为状态矩阵;B1为输入矩阵;B2为扰动系数矩阵。各系数矩阵具体形式见附录A。
3 ISCC 系统控制器设计
本章考虑在实际应用场景中ISCC 系统的内外扰动造成的不确定性影响,采用ADRC 方法进行控制器设计。通过在ISCC 系统始端设置跟踪微分器(tracking differentiator,TD)处理系统参考输入,以实现快速无超调理想过渡过程。并对光热系统内部及外部扰动进行协同考虑,通过构造扩张状态观测器(extended state observer,ESO)对系统的扩张状态及扰动进行估计与实时补偿,利用非线性状态误差反馈控制律(nonlinear state error feedback,NLSEF)实现闭环系统的极点重新优化配置,从而获得较好的控制可靠性以及控制精度。考虑到ISCC 系统中被控对象为惯性串联系统且扰动为非线性不确定性输入,通过惯性串联型ADRC 方法设计的控制系统可以直接针对惯性串联系统的被控对象特征进行系统期望模型以外扰动的估计和补偿。
3.1 惯性串联型ADRC 控制器状态空间模型
ADRC 是一种非线性鲁棒控制技术,通过优化配置ISCC 系统中非线性模块极点进行控制系统的扩张观测器子模块设计,并依据ISCC 系统内、外部扰动下实际电热功率输出与系统输入端电热负荷需求的误差大小,进一步实施非线性反馈控制。在一般控制系统设计中积分串联模型被广泛应用,但在本文的主要研究对象ISCC 系统中,CSP 与CCGT子系统的被控对象均为数个一阶惯性环节的串联。因此,将惯性串联系统模型构建方法与ADRC 的动态补偿线性化思想相结合,可以更好地针对ISCC系统具体结构进行抗扰控制器设计,提高整个控制系统的精确性及可靠性[18]。
将原有ISCC 状态方程写成如下引入扰动量的n阶惯性串联扩张状态方程形式[19]。
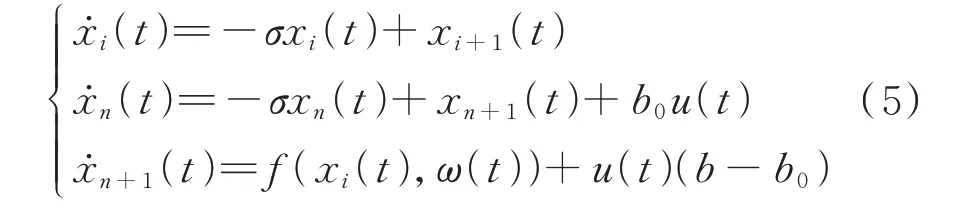
式中:xi(t)(i=1,2,…,n-1)为状态变量;xn+1(t)为惯性串联系统的扩张状态;b0为与参数b具有相同符号的粗略估计;σ为ISCC 系统被控对象惯性环节的极点,当σ=0 时,则为一般积分串联系统;u(t)为系统的控制输入;ω(t)为系统中负荷波动量;f(·)为系统各阶状态变量与扰动的耦合关系表达式。
针对系统状态方程作如下假设。
假设1:f和b对其自变量的一阶偏导数局部Lipschitz 连续。
假设2:b的符号不变,且有b的下限bmin>0。
在实际系统中,f作为系统各阶状态变量与扰动的耦合关系表达式,b作为控制器引入系统的增益参数,通常情况下都满足对其自变量的一阶偏导数局部Lipschitz 连续。
3.2 惯性串联系统扩张状态观测器与跟踪微分器
在得到ISCC 系统的惯性串联型系统状态方程的基础上,通过ADRC 控制器的核心环节扩张状态观测器对系统输出进行进一步处理。然后,对CSP与CCGT 子系统的各阶状态变量进行观测,并对ISCC 系统内、外部扰动进行协同考虑,估计出外部太阳辐射扰动后将其引入控制量中,以便后续依据扰动量的观测值对系统综合扰动实现补偿控制。最后,对补偿后的系统进行反馈控制,把闭环系统的极点配置到期望的位置实现ADRC。
为实现控制系统反馈补偿等后续工作,要求扩张状态观测器能有效跟踪ISCC 系统的状态变量及其各阶广义微分信号,并直接估计ISCC 系统扰动。非线性扩张状态观测器反馈结构的非线性、非光滑特性导致理论分析十分困难,并且假设条件较为严格,通常难以判断被控系统是否满足收敛性要求。因此,为了简化ADRC 方法的分析和实现过程且使得其在实际工程应用中更具有指导意义,本文采用了文献[20-21]所提出的单参数调整的线性扩张观测器,作为非线性扩张状态观测器线性化的一种特殊情况。分析图2 中的系统结构可知,CSP 子系统中有4 个一阶惯性串联模块,CCGT 子系统中有5个一阶惯性串联模块,因此将各被控环节输出变量作为系统的可量测变量,建立如下9 阶扩张观测器模型。

式中:x̂1(t),x̂2(t),…,x̂8(t) 为系统状态x1(t),x2(t),…,x8(t)的估计;x̂9(t)为总和扰动x9(t)的估计;δ为扩张状态观测器增益调节参数;k1,k2,…,k9为线性扩张状态观测器增益参数。
扰动观测器的快速性通常会受到非线性函数设计和参数调整的影响,其响应速度主要与带宽影响因素有关[20]。带宽影响因素与线性扩张状态观测器增益参数ki和结构参数δ存在确定的函数关系。且δ越小,系统响应的带宽越大,系统响应速度越快,误差越小[22]。针对本文所采用的单参数调整的线性扩张观测器,其快速性同样受到参数ki和δ的影响。为使扩张观测器在任意给定的初始值条件下都具有收敛性,依据如下定理1,ki的取值应满足如下系数矩阵K为Hurwitz 矩阵。
定理1:假设系数ki=k͂i/εi,其中0<ε<1,k͂i为Hurwitz 多项式的系数,且满足假设1 和2,则xi(t)收敛于扩张状态量x̂i(t)。
考虑到多云天气状况致使系统入射角产生的不确定性变化,本文利用跟踪微分器对扰动进行跟踪并输出,同时处理系统参考输入以实现ISCC 系统始端的快速无超调理想过渡过程。针对系统输入侧的电、热功率信号不稳定的情况,跟踪微分器可以提取不连续参考输入的各阶导数跟踪信号作为后续控制器设计的基本要素。本文中所采用的9 阶跟踪微分器的具体结构如下。

3.3 ISCC 系统的惯性串联型ADRC
将ADRC 方法应用于ISCC 系统的关键在于通过扩张状态观测器得到对扰动估计的扩展状态x̂n+1,其中扰动为太阳辐射强度变化或负荷波动等外部扰动与ISCC 系统内部不确定性因素叠加的综合扰动,将所得扩展状态量反馈至系统控制输入端以实现对状态空间的动态补偿线性化,并在此基础上通过反馈控制实现补偿后ISCC 系统的极点配置,从而满足闭环系统的性能要求。ISCC 系统的ADRC 结构如图3 所示。

图3 ISCC 系统的ADRC 结构Fig.3 ADRC structure of ISCC system
由3.2 节中公式推导与图3 中控制系统结构可知,惯性串联型ADRC 结构中还利用输入侧参考电、热信号的高阶导数作为前馈控制量,其控制输入为:
从图3 可以看出,将惯性串联型ADRC 作为ISCC 的控制器具有3 个方面的自由度。首先,采用跟踪微分器对输入信号的过渡过程进行控制,确保在电热负荷波动等外部因素影响下系统输入端的鲁棒稳定性,同时维持系统动态性能,解决快速跟踪性和系统超调之间的矛盾。其次,利用扩张观测器实现动态非线性补偿以克服外界太阳辐射强度变化带来的大幅度不确定性影响,将原本的非线性时变不确定系统转化为惯性串联确定系统。最后,采用非线性状态误差反馈率设计反馈控制器,满足系统闭环稳定性要求。
4 仿真结果与分析
对所提出的ISCC 系统自抗扰功率协调控制方法进行仿真实验,ISCC 系统中燃机部分总装机容量为50 MW,太阳能热发电容量为50 MW。通过与文献[23]中针对综合能源系统提出的混合H2/H∞控制方法及文献[24]提出的以非线性PID(NLPID)控制为基本方法的自耦PID(auto coupling PID,ACPID)控制算法相比较,验证针对惯性串联系统控制的有效性和动态响应性能;同时,将惯性功率补偿方法与无补偿、增益补偿方法进行对比,验证惯性功率补偿方法的有效性。参照文献[1]及文献[25-26]中的参数设置,本文研究中涉及的系统仿真控制参数及物理参数设置如附录B 表B1 和表B2所示。
针对本算例ISCC 系统,应使系数矩阵E和K为Hurwitz 矩阵,以满足系统收敛性。将各系数取值定为[k1,k2,k3,k4,k5,k6,k7,k8,k9]T=[9,36,84,126,126,84,36,9,1]T, [a1,a2,a3,a4,a5,a6,a7,a8,a9]T=[9,36,84,126,126,84,36,9,1]T。为兼顾动态性能和系统鲁棒性,扩张状态观测器增益参数δ取值通常在[0.001,1)之间,在此取0.01。考虑到跟踪微分器在ADRC 中的相对独立性,参数R的取值变化对系统性能影响不大,因此无须精确调节,取R=100。经过Simulink 搭建仿真环境,运行群智能优化算法得到ISCC 系统中惯性功率补偿环节的最优时间常数取值为7.656 8。在控制其余变量不变的条件下,经过仿真实验,选定本系统中选取的增益补偿环节的比例参数最优取值为0.5。
4.1 太阳辐射扰动场景下不同功率补偿策略系统动态响应性能分析
在太阳能利用过程中,其固有的不确定性和间歇性等问题会影响到太阳能热电系统发电效率,为验证所提功率补偿策略及控制器对太阳辐射扰动的平抑效果,进行晴朗及多云2 种天气情况下的ISCC系统动态响应仿真分析。
首先,进行晴朗天气下的系统仿真验证,选取美国俄亥俄州2019 年8 月23 日11:40—12:40 的太阳辐射数据,见附录B 图B1,辐射强度在500~1 100 W/m2之间波动,其中在11:46 后太阳光照有一明显减弱,由1 100 W/m2降至600 W/m2,随后维持较为平稳的光照输出。
系统动态响应见图4(a),由于CSP 子系统本身具有的等效储热环节作用,当太阳辐射变化较小时对系统电能部分影响不大,如图4(a)中3 条电能输出曲线所示,因此主要分析热能输出变化。在无补偿及增益补偿条件下,系统热能调节时间较长(2 500 s 后才达到负荷要求),且对于辐射强度变化的抗扰性较差,在500~1 000 s 的输入大幅度变化阶段,其热能输出偏离稳定值分别达0.2 p.u.和0.1 p.u.。而惯性补偿下系统在1 500 s 即趋于稳定,且热能输出仅在0.8±0.05 p.u.范围内调节,对于辐射波动有较强的抗扰性。

图4 不同天气情况下系统动态响应对比Fig.4 Comparison of system response under different weather conditions
进一步,仿真更加复杂的多云天气情况。选取美国俄亥俄州2019 年8 月1 日10:30—11:30 的太阳光照数据,见附录B 图B2。由于存在云朵遮挡的情况,太阳辐射强度在300~1 200 W/m2之间大幅波动,尤其10:50—11:15 时段内,辐射强度出现较大幅度的波动,从1 000 W/m2骤降至300 W/m2。系统动态响应如图4(b)所示,当扰动较大时,对系统电能部分的影响主要体现在响应时间方面。首先,进行电功率输出分析,由实验结果可见,惯性功率补偿下电功率输出稳定时间比无补偿和增益补偿快190 s。分析热能输出变化,在1 500~3 000 s 的太阳辐射强度大幅变化阶段,无补偿条件下系统热能输出波动在0.8±0.3 p.u.范围内,对于大幅扰动变化的平抑效果较差;增益补偿的效果相对较好,但系统热能输出仍存在±0.2 p.u.的波动;而惯性补偿下系统热能输出峰值仅在0.8±0.1 p.u.范围内调节,因此对于大幅度的太阳辐射扰动有较强的抗扰性。
4.2 负荷波动场景下不同功率补偿策略系统动态响应性能分析
分析系统运行过程存在负荷波动时惯性补偿策略对系统动态性能的影响。在多数实际用能场景中,电负荷比热负荷的波动性大且变化频繁,故本实验设定电负荷在1 500 s 时由0.3 p.u.增至0.5 p.u.,期间热负荷始终维持在0.8 p.u.。所得ISCC 系统的动态响应如图5(a)所示。由实验结果可得,因ISCC 系统具有热电耦合性,当电负荷发生波动时,热负荷也随之振荡。在无补偿、增益补偿及惯性补偿3 种策略下,系统热功率超调量分别为22.63%、18.75%、16.63%,且3 种补偿策略下负荷波动后系统恢复稳定所需时间分别为690、328、282 s。在系统启动阶段,惯性功率补偿策略下的系统稳定时间同样比无补偿条件下的时间缩短408 s。通过分析对比,可得本文所用功率补偿方法具有更好的系统动态响应性能,可有效提升ISCC 系统综合能源供给能力及系统输出性能。
调节阀作为系统主要控制执行单元,对ISCC系统的稳定运行产生重要作用。其长时间、大尺度频繁开闭会造成磨损,导致系统输出偏差及振荡,进而增大故障概率。不同补偿策略下蒸汽流量调节阀u1和抽汽调节阀u2的变化情况见图5(b)。在0~500 s 范围内,为满足系统的电热负荷需求,蒸汽流量调节阀开度较大,500 s 后随着系统输出电热功率增加,调节幅度逐渐减小。对比分析3 种补偿策略下的调节阀开度变化及稳定时间可知,在惯性功率补偿策略下,u1的波动幅度仅为18.7%,同时系统在200 s 内即恢复稳定,与增益补偿条件下的u1调节幅度相比减小了23.67%,调节时间缩短了44.44%;与无补偿下u1调节幅度相比减小了44.84%,调节时间缩短了65.52%。当电负荷增加时,调节阀u2开度相比于调节阀u1开度发生较大变化,因此u2对电功率的输出起主导作用。在1 500 s 电负荷由0.3 p.u.增至0.5 p.u.后,惯性功率补偿下调节阀u1调节幅度与无补偿、增益补偿下的调节幅度相比减少了9.4%和4.3%。抽汽调节阀u2在无补偿、增益补偿下的调节幅度分别为14.4%和9.3%,而惯性功率补偿仅为5%,与上述两者相比有效减小的占比为65.28%和46.24%。因此,惯性补偿策略能有效控制调节阀的开度变化,在负荷变动的系统中具有很好的调节作用,维持系统良好的动态性能。
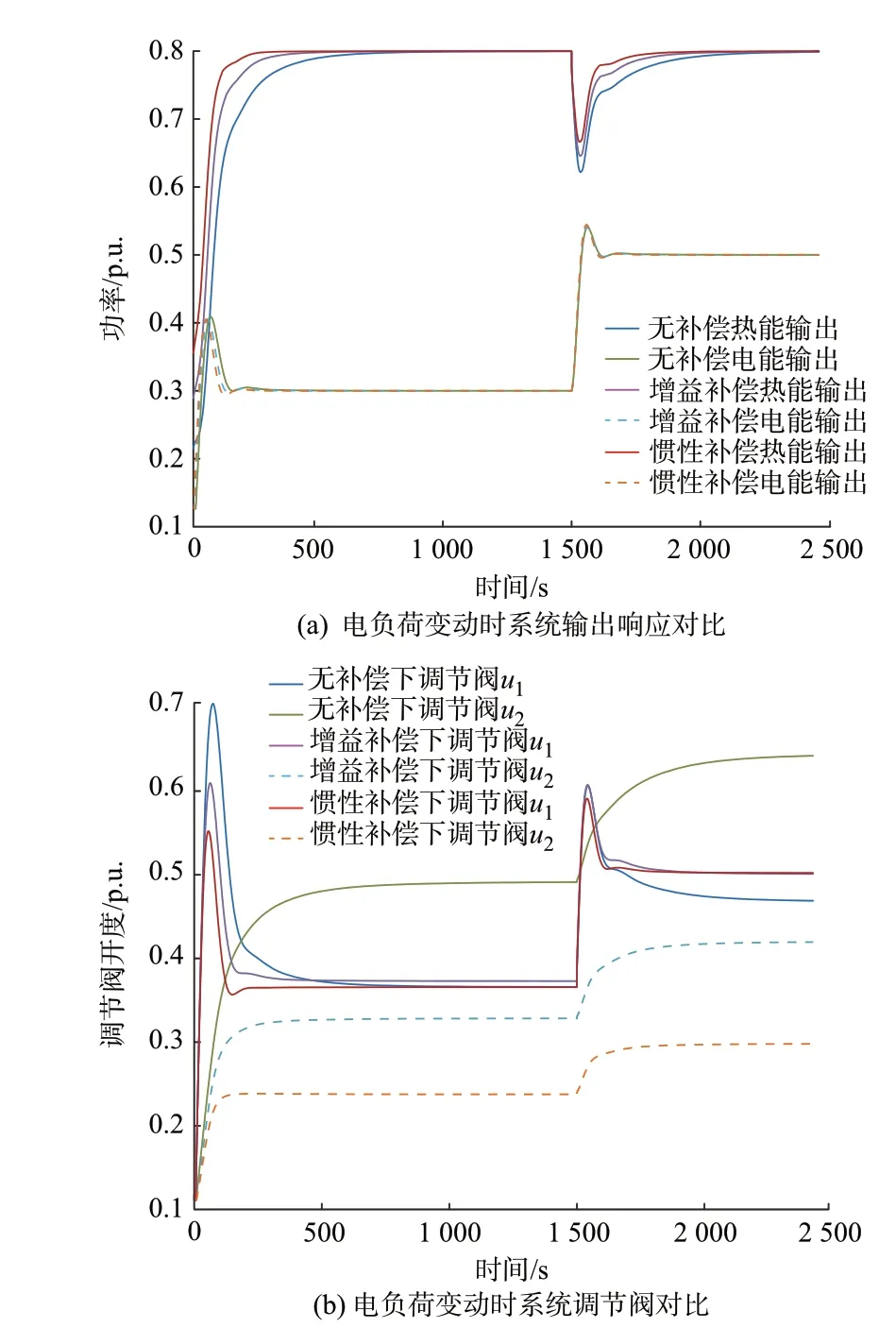
图5 电负荷变动时不同功率补偿策略对比Fig.5 Comparison of different power compensation strategies when electric load changes
此外,针对不同功率补偿策略下2 个子系统的运行状态进行进一步仿真实验分析,对应内容见附录C。
4.3 不同控制算法系统调节性能对比
将H2/H∞与非线性PID 这2 种控制方法应用于ISCC 系统仿真中,并与ADRC 方法进行对比分析。
1)对比分析不同控制算法对ISCC 系统的控制效果,观察系统在热负荷为0.8 p.u.、电负荷为0.3 p.u.时的电、热输出功率。分别采用H2/H∞控制器、非线性PID 控制器与ADRC 控制器进行比较,对考虑热电耦合的ISCC 系统进行动态响应分析。考虑更极端的多云天气下太阳辐射强度剧烈变化情况(见附录B 图B2),得到不同控制算法下系统响应对比如图6(a)所示。在施加非线性PID 控制的情况下热功率输出存在较大超调,其超调量为37.5%,H2/H∞控制器控制下热功率输出超调量为18.75%,有一定的平抑波动效果;而在ADRC 下,系统热功率输出超调量仅为12.5%,与非线性PID 控制相比有效减少了25%,与H2/H∞控制器相比减少了12.5%。在电负荷需求从0.5 p.u.降至0.3 p.u.的负荷波动情况下,系统电热响应过程如图6(b)所示,其中ADRC下的热功率超调量与另2 种控制器相比分别降低了18.75%和12.5%,且系统在波动后200 s 内即恢复稳定,其稳定过程所需时间与非线性PID 控制相比缩短了500 s。
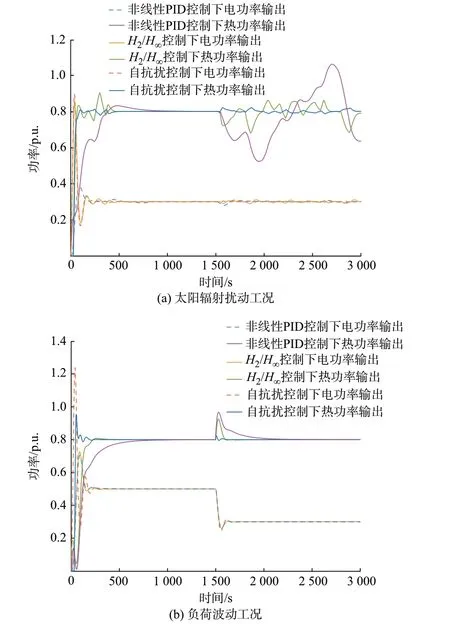
图6 不同控制算法下系统输出响应对比Fig.6 Comparison of system output responses with different control algorithms
2)分析不同控制器使系统获得的稳定裕度,如图7(a)和(b)所示。从图中可以看出,在H2/H∞控制及非线性PID 控制下,ISCC 系统电能相位裕度分别为91°和62°,热能相位裕度分别为88°和72°,而与之相比,ADRC 下系统热能、电能的相位裕度分别提升到136°和118°,因此ADRC 控制器使ISCC 系统获得了更大的稳定裕度,系统稳定性得到了大幅提升。且在角频率10 rad/s 附近,非线性PID 控制下电能输出的幅频特性曲线存在尖峰,H2/H∞控制的输出曲线也不甚平滑,表明在这2 种控制方法下的系统阶跃响应存在轻微振荡现象,与之对比ADRC 方法下所得输出曲线更为平滑,具有较好的相位裕度和幅值裕度,可以保证ISCC 系统的安全稳定运行。

图7 不同控制算法下系统功率输出Bode 图分析Fig.7 Bode analysis of system power output with different control algorithms
表1 和表2 分别为负荷波动和太阳辐射工况下热功率在NLPID、H2/H∞以及ADRC 这3 种控制下的性能指标对比。分析表明,ADRC 在稳定时间超调量和相位裕度方面控制效果均为最佳。因此,ARDC 在ISCC 系统应用中具有显著优势。
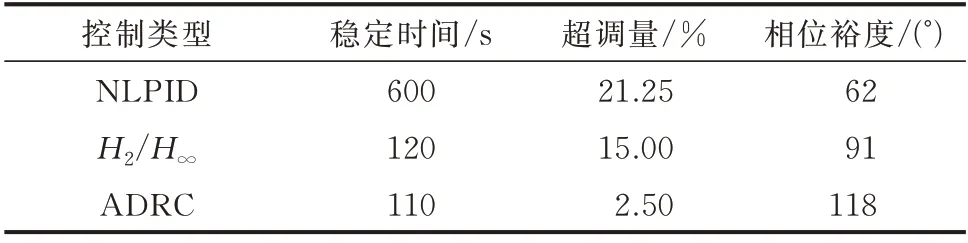
表1 负荷波动工况下系统热功率控制性能对比Table 1 Control performance comparison of system thermal power with different load fluctuations

表2 太阳辐射波动工况下系统热功率控制性能对比Table 2 Control performance comparison of system thermal power with different solar radiation fluctuations
5 结语
ISCC 系统作为清洁能源利用的一种新型途径,有利支持国家碳达峰、碳中和“3060”目标和清洁低碳、安全高效的能源体系建设。本文以ISCC 系统为主要研究对象,针对因CSP 子系统与CCGT 子系统的响应速度差异造成的系统输出无法满足负荷需求的问题,提出ISCC 系统惯性功率补偿策略。在此基础上,考虑到外部太阳辐射强度大幅度扰动及系统自身固有的电热负荷波动对系统稳定运行造成的不确定性影响,采用ADRC 方法进行控制器设计,将光热系统内部及外部扰动进行协同考虑从而获得较强的控制可靠性及控制精度。同时,还基于美国俄亥俄州真实日照数据进行仿真实验验证。实验结果表明,本文所提出的功率补偿策略及控制方法能够有效缩短系统稳定时间、减少系统超调量,并使热-电负荷动态变化过程更加平稳,实现太阳能热发电的清洁环保特性与燃气轮机响应速度优势的充分结合利用。
随着新能源高比例接入,电力系统的系统惯量和抗扰动支撑能力都受到影响,本文研究并提出的系统惯性功率补偿策略和ADRC 控制器设计方法同样适用于高比例新能源电力系统。面对更多样的新能源耦合系统的功率协调控制将是后续研究的重点。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。