基于Process Simulate在物料智能分拣系统中的应用
2022-03-11崔久好
崔久好
(山东莱茵科斯特智能科技有限公司,山东 淄博 255000)
1 引言
在物料智能分拣系统集成项目实施过程中,从招标到项目交付需要一定的时间。但实则往往会遇到客户要求项目提前交付,这样就要求项目实施方延长正常的工作时间,可效果并不理想,这时Process Simulate软件的优势就会体现出来。数字孪生项目工程师只需从机械设计师那里获取整个项目的3D模型即可开展项目。当数字化工程师通过软件Process Simulate对模型进行设置后,配合电气工程师即可对项目进行自动化编程,电气工程师进行自动化项目PLC程序的编写,同时数字化工程师进行机器人程序的编写。在设备安装完毕之前,整个自动化产线的PLC程序、机器人程序已经编写完成。通过Process Simulate虚实联调技术验证整个产线设计方案的可行性,同时设计方案的高效性得到体现,从而缩短项目交付时间。
2 物料智能分拣系统的设计
2.1 机械结构
2.1.1 主要组成部分
物料智能分拣系统的主要组成部分如图1、图2所示。
图1 中物料智能分拣系统主要组成部分:①抓料夹爪;②半成品库;③成品库;④料仓A;⑤料仓B;⑥成品组装区;⑦传感器A;⑧传感器B;⑨深度检测传感器C;⑩ABB机器人本体;⑪运输皮带。

图1 三维俯视图
图2中物料智能分拣系统的主要组成部分:①ABB控制器;②西门子1500PLC。

图2 三维主视图
2.1.2 工艺流程
此系统在没有故障的前提下,通过图2中西门子1500CPU中的PLC程序控制整个系统的自动运行。
当料仓A中的物料被推出时,物料会随着运输皮带运行,经过传感器A、传感器B和深度检测传感器C的检测,最后在运输皮带的末端停止。在此过程中系统程序会判断出被推出物料材质、颜色、物料的型号。现将系统判断的几种情况进行汇总说明。
(1)当判断的结果有料且物料的型号为公头物料时,1500CPU给机器人发移动到成品装配区的信号,机器人收到信号后执行程序,安装抓料夹爪。当安装完夹爪后,机器人移动到运输皮带的末端将物料抓取放回到成品组装区,之后回到成品组装区正上方80 mm处停止,等待系统信号。
(2)当判断的结果有料且物料的型号为非公头物料时,1500CPU给机器人发送移动到半成品库的信号,机器人收到此信号执行程序,安装抓料夹爪。当安装完夹爪后,机器人移动到运输皮带的末端将物料抓取放回到半成品库,之后回到半成品库正上方100 mm处停止,等待系统信号。
当系统程序经过以上两种情况的判断且机器人处在等待信号状态时,料仓B中物料被推出,物料会随着运输皮带运行,经过传感器A、传感器B和深度检测传感器C的检测,最后在运输皮带的末端停止。在此过程中系统会判断出被推出物料材质、颜色、物料的型号,现将系统判断的几种情况进行汇总说明。
(1)当判断的结果有料且物料的型号为母头物料时,1500PLC会给机器人发出移动到成品组装区的信号,机器人收到信号后移动到运输皮带的末端将物料抓取放回到成品组装区。组装完成后,1500CPU给机器人发送移动到成品库信号,机器人得到信号后将组装区的物料按照顺序搬运到成品库,之后回到机器人的原点位置,等待系统信号。
(2)当判断的结果有料且物料的型号为非母头物料时,1500CPU会给机器人发送移动到半成品库的信号,机器人移动到运输皮带的末端将物料抓取放回到半成品库,之后回到半成品库正上方100 mm处停止,等待系统信号。当成品库或半成品库放满物料时,整个物料分拣系统停止。
2.2 Process Simulate设计
创建智能分拣系统的3D模型并导入到Process Simulate软件中,根据工艺流程要求创建运动学设备、概念机运线和运动设备有关信号。
2.2.1 ABB机器人/成品组装区设备运动学创建
ABB机器人/成品组装区设备在整个智能分拣系统中占主导地位,起决定性作用。半成品库和成品库物料的搬运、抓料夹爪的安装和成品的组装都需要机器人/组装区设备的移动才能实现。因此需根据功能要求在运动学编辑器中创建正确的运动学,以实现其移动。机器人运动学的创建如图3所示,成品组装区设备运动学的创建如图4所示。

图3 机器人运动学

图4 成品组装区设备运动学
2.2.2 定义概念机运线
智能分拣系统中料仓A和料仓B中的物料被推出时,由于Process Simulate 14版本中无法定义重力属性,料仓中的物料无法下落到料仓底部,进而无法被底部传感器感应,会造成PLC程序无法正常运行,从而造成虚拟调试失真,这样无法验证设计方案的可行性和设备的可达性,因此软件必须定义料仓的概念机运线,从而解决虚拟调试失真问题。定义概念机运线如图5、图6所示。

图5 料仓A机运线设置

图6 料仓B机运线设置
2.2.3 信号创建
在Process Simulate三维模型中,信号用于运动控制和外部1500CPU的信息交互,包括input signal和output signal两种信号类型。Input signal是外部1500 CPU输入到Process Simulate模型的信号,output signal则是Process Simulate输出到外部1500CPU的信号。信号创建完成后才能实现软件与外部1500CPU之间的信号交互,是完成智能分拣系统虚实联调的必要条件。创建的信号如图7所示(注:创建的信号名称可以是中文或英文)。

图7 信号创建
3 Process Simulate在智能分拣系统中的应用
3.1 Process Simulate在智能分拣系统中的虚拟调试
3.1.1 虚拟调试的目的
利用虚拟PLC控制3D模型动作,可以验证物料智能分拣系统设计的有效性、设备的可达性,减少机械设计师对三维模型修改次数和机械和电气部件的损耗。
通过Process Simulate加载智能分拣系统的3D模型,并创建系统设备的运动学、概念机运线和外部1500CPU通信讯号等。
3.1.3 虚拟调试的步骤
(1)通讯设置
第一步打开PLCSIM Advanced高功能仿真器,然后点击Start Virtual创建一个项目名,名称设置为192.168.0.1(与CPU的IP地址相同),最后点击Start完成创建。高功能仿真器如图8所示。

图8 PLC仿真器
第二步打开Process Simulate软件,点击文件→选项→PLC→外部连接→连接设置→添加→PLCSIM Advanced→创建外部连接→输入外部连接的名称XXXX(注:信号查看器中外部连接选择XXXX)。
第三步打开博图软件,选中所创建的项目点右键在属性中勾选“块编译时支持仿真”。
1.请家长来学校了解教学情况和学生的学习情况。针对不同层次的学生使用不同的方式请家长参观学校,对成绩良好但思想不太优秀的学生说:“你的学习成绩是优秀的,老师想让你更优秀,老师需要和你的父母讨论一些其他方面的问题。”对有一技之长的后进生说:“你擅长体育(音乐、绘画等),如果你深入学习,然后去上一个更高层次的学校,你将有一个强有力的立足于社会的技能。”简单的教育方式蕴涵着一个朴素的教育理念——相信学生,教育学生的全部秘密在于相信学生和解放学生。相信学生、解放学生,首先要赏识学生。
(2)编写及下载PLC程序
在物料智能分拣系统中,主要是根据工艺要求实现不同物料的分拣,整个分拣过程中利用机器人的移动实现物料的搬运,利用成品组装区的设备实现物料的压合从而将物料进行装配。其过程中首先根据运动需求定义信号的变量和数据类型(见图9),然后在博图TIA程序块中根据工艺要求编写PLC程序。

图9 全局变量
3.2 Process Simulate编写智能分拣系统程序
真实智能分拣系统装配完成之前,利用Process Simulate软件进行机器人离线编程,利用软件导入三维模型并借助西门子PLC编程软件实现对分拣系统程序编写,解决无真实设备状态下的编程,验证基于Process Simulate在物料智能分拣系统中的高效性。
3.2.1 机器人离线编程
(1)机器人属性设置(Robot Properties)
属性设置以ABB机器人为例。首先选择机器人的品牌,这里把Controller选择为ABB-Rapid,其次把Robot vendor设置为ABB,最后把Controller version选择为6.04RW6。只有以上设置正确了,才能继续对机器人进行程序编写。设置如图10所示。
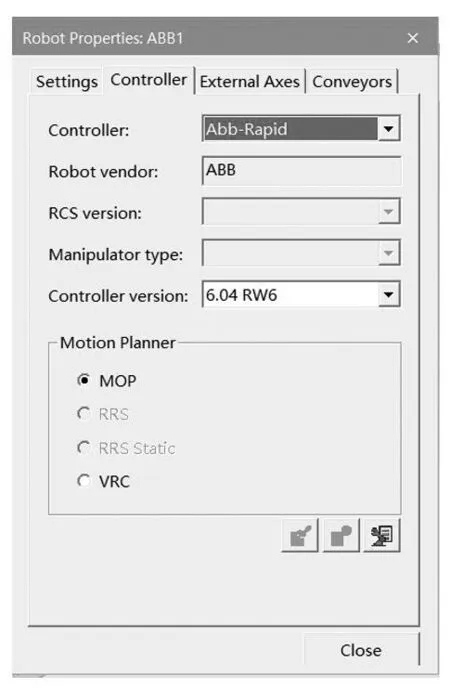
图10 Robot Properties设置
(2)设置机器人配置(ROBOT Setup)
利用Robot Setup对机器人的移动速度、工具坐标系和工件坐标系等进行定义并设置,为机器人程序编写做好铺垫。设置如图11所示。

图11 ROBOT Setup设置
(3)机器人程序编写
在Path-Editor的OLP中编写机器人逻辑程序,利用Operations里面的Add Location By Pick进行点的示教,创建机器人轨迹子程序,如图12所示。

图12 程序编写
(4)机器人程序展示
Process Simulate编写的程序如图13所示。通过Program中的Download to Robot将程序下载到真实机器人控制器中。

图13 机器人程序展示
3.2.2 PLC离线程序编写
Process Simulate软件无法进行PLC程序的编写,但可利用软件导入智能分拣设备三维模型,搭建符合PLC程序编写的条件。借助西门子PLC编程软件实现对智能分拣系统的程序编写,解决无真实设备状态下的编程,验证基于Process Simulate在物料智能分拣系统中的高效性。
4 Process Simulate软件未来发展趋势
随着西门子工厂数字化技术的推广,越来越多的企业、学校开始使用Process Simulate软件。现代企业应用此软件较多的领域是汽车主机厂、高科技电子、航空航天、铁道机车车辆、摩托车、船舶、机床、重型装备、新能源电池等。此外,国内的很多大型车企已经开始应用此软件。随着软件在智能化、自动化领域的不断应用,越来越多的企业会应用此软件。现在国内很多院校已经开设Process Simulate软件课程。较早开设此课程的东莞理工学院,每年为各企业输送大量的数字化技术应用人才。同时随着校企合作的开展和深度产教融合的实施,校企“1+X生产线数字化仿真与应用”证书的推广,越来越多的高校应用并推广此软件。
5 结语
综上所述,本文主要阐述了智能分拣系统的组成,介绍了软件在智能分拣系统中的应用,并预测了软件的发展趋势。希望本研究能对从事与该软件有关的技术人员、工程师、技师、学校老师和在校同学等在理论学习和实践应用有一定的借鉴作用。
不过,此软件也存在一些应用不足。以ABB机器人为例,其在现场数字孪生虚实联调时,Process Simulate软件无法识别偏移指令(OFFS),因此一些路径点无法识别,需要人为确定这些路径点。此外,机器人在更换不同的工具时会造成TCP的识别错误。但是,笔者相信,随着软件的迭代升级,软件中的一些应用不足也会得到解决。
