基于车路协同的无信号交叉口协调控制策略
2022-03-08侯叙良陈志军
侯叙良,黄 珍,陈志军
(1.武汉理工大学 自动化学院,武汉 430070;2.武汉理工大学智能交通系统研究中心,武汉 430063)
交叉路口作为城市交通道路网重要的组成部分,是连接不同方向道路的节点,在城市交通中起着至关重要的作用。据统计,40%的交通事故发生在交叉路口,其中约7成发生在无信号灯交叉口,且严重程度高于信号灯交叉口。因此,提高无信号交叉口的通行安全,减少交通事故,是世界各国学者都在研究的重点方向。
近年来,随着一系列技术的发展,包括传感器技术、无线通信技术、智能车辆技术等,车路协同技术成为了智能交通领域的研究热点。文献[1]基于车路信息交互,建立了多车冲突消解模型,通过判断和评估交叉口的车车冲突情况,调节车辆速度,改变车辆抵达交叉口的状态,避免交通事故的发生。但其主要是通过已建立的无信号交叉口通行规则确定车辆的优先权级别,并未考虑到路口的通行效率。文献[2]通过获取进入路口的各个车辆的状态信息,预测车辆在路口发生的潜在冲突,并为每个车辆计算出避免冲突的目标速度,保证车辆安全通过路口。但并未考虑到车辆行驶过程中轨迹的舒适性与平滑性。文献[3]在为车辆分配通行时隙的基础上,判断了车辆的速度控制曲线是否存在,并在多约束条件下,通过三段控制模式完成对车辆的控制。但此过程在车辆较多的情况下,求解的复杂度会很高。
在此基础上,本文设计一种基于“冲突点占用”的交叉口车辆协同控制策略,建立相应的数学模型和求解算法,对个体车辆的行驶过程进行完全控制,保证了车辆行驶中轨迹的舒适性与平滑性,提高了路口的通行效率。
1 基于车路协同的交叉口车辆协调系统框架
交通冲突是指2个或多个车辆在时空上相互接近,运动状态不调整导致碰撞的现象[4-5]。考虑图1所示的交叉口,有4个冲突点,分别编号为0—3。对于相对应的入口车道而言,当i车道的车辆为右转时,占用冲突点的编号为i;直行时占用冲突点编号为i,(i+1)4;左转时占用冲突点的编号为i,(i+1)4和(i+2)4,符号“”表示整除,如图2所示。
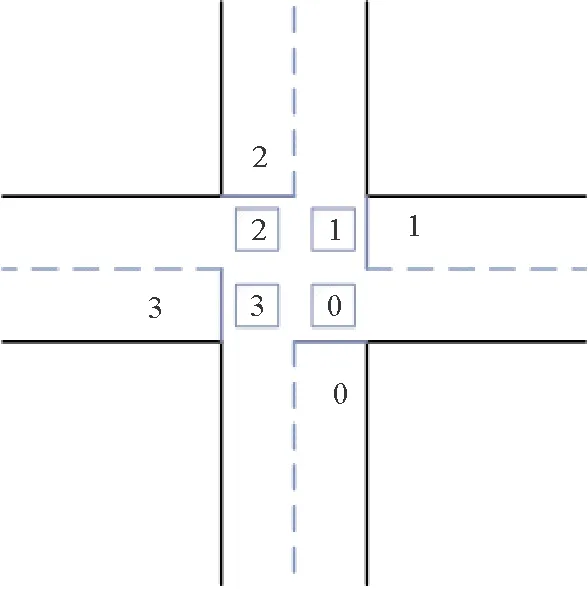
图1 十字路口示意
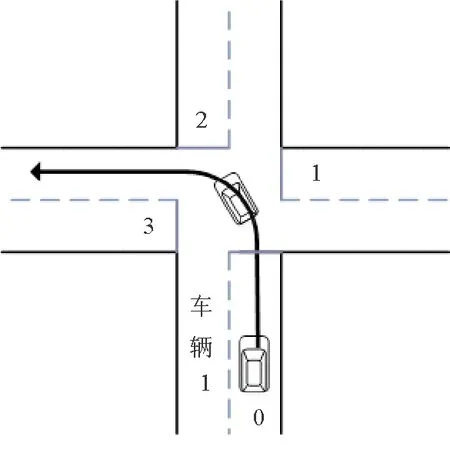
图2 车辆占用冲突点示意
针对图1所示的交叉口,设计了由车载单元和路侧单元组成的交叉口协调控制系统,见图3。车辆进入路侧单元通信范围内,会周期向路侧单元发送运行状态信息,包括车辆位置、速度等[6]。路侧单元在接收和处理车辆信息后,会根据协调算法,决策出最优通行策略,并发送控制命令控制车辆的驾驶行为。

图3 交叉口协调系统框架
为保证系统的正常运行,作出如下假设:
1) 车辆在直行通过路口过程中,无行人和非机动车干扰[7]。
2) 车辆进入交叉口通信范围前为匀速行驶,且进入通信范围后不允许进行换道。
3) 车辆在行驶过程中和路侧设备通信正常,无延迟和丢包现象。
2 车路协同环境下路口协同控制模型
2.1 分区控制
为充分利用路侧设备的通信范围,更好地控制车辆的运动[8],本文将交叉口的路段分为3个区,如图4所示,即:
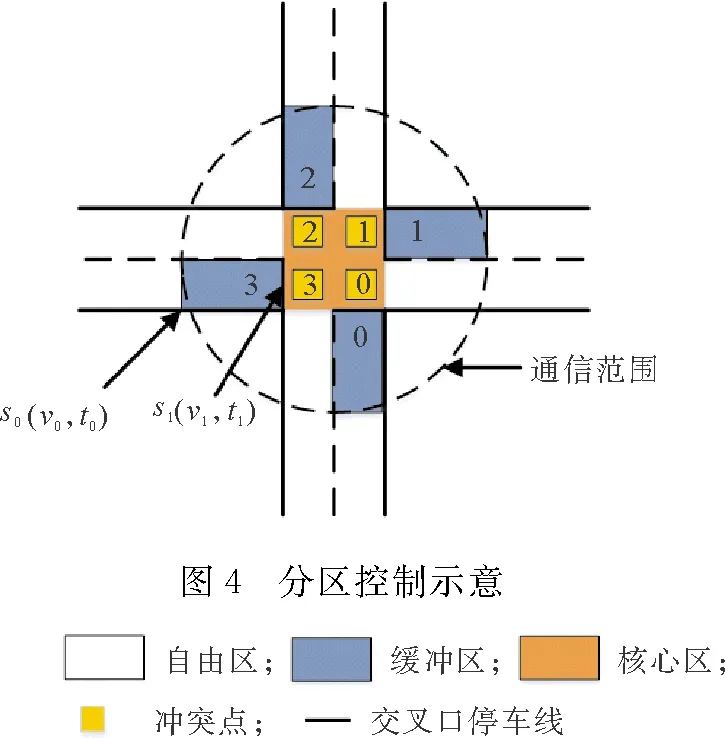
1) 自由区:车辆未进入路口的通信范围,不接收交叉口控制中心的命令,自主行驶的区域。
2) 缓冲区:车辆进入路口的通信范围,接收交叉口控制中心的命令,在到达交叉口停车线前调整自身速度的路段。
3) 核心区:考虑到交叉口内部通车情况复杂,车辆速度发生变化会导致计算复杂度的增加。因此,为运算方便,在核心区内车辆速度保持不变,进行匀速运动。
车辆进入缓冲区后,会向路口控制中心发送自身的实时状态信息S0(v0,t0);路口控制器在接收到车辆信息后,先进行信息处理,然后判断车辆是否产生冲突,若存在冲突则为车辆分配通行顺序,重新为车辆规划轨迹,发送控制命令给车辆,保证车辆进入核心区状态为S1(v1,t1)。
2.2 车辆调度
冲突点在任何时刻只能被独占[9],这里以冲突点0为例进行分析,见图5。车辆1抵达冲突点(Conflict Point)0和离开冲突点0的时刻分别为t011和t012,车辆2抵达冲突点0和离开冲突点0的时刻分别为t021和t022。若两车存在交通冲突,则其占有冲突点0的时间存在相交,见图6。
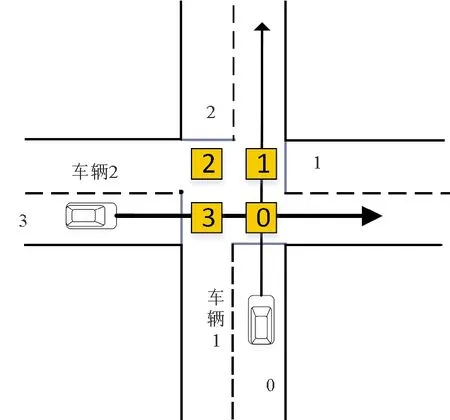
图5 路口车辆冲突示意
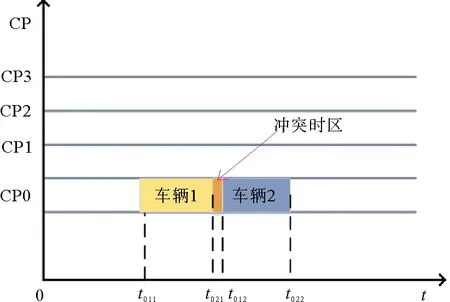
图6 冲突点占用时空
在此基础上,定义编号为n的车辆对冲突点i的占用时间为TO(i,n)=[ts,te],ts和te分别表示编号为n的车辆对冲突点占用开始和结束的时刻。为避免车辆冲突,车辆对同一冲突点的占用时间应确保不会产生相交。定义车辆p在通行交叉口时,其轨迹上经过j个冲突点,则车辆p对冲突点的占用时间为
TVO(p)=TO(1,p)∪TO(2,p)∪…∪TO(j,p)
(1)
式中:TVO(j)为车辆p对冲突点j的占用时间。
对冲突点j而言,其占用时间为
TCO(j)=TO(j,1)∪TO(j,2)∪…∪TO(j,i)
(2)
式中:TCO(i)为冲突点j上编号为i的车辆所占用的时间。
为保证车辆尽快安全通行,即车辆通过交叉口的时间最小,选取目标函数为
(3)

通过调整车辆i进入核心区的状态,可以确定车辆i通过交叉口的时间,进而计算出车辆总通行时间,具体算法流程如下。
步骤1:初始化,令车辆抵达交叉口停车线最短时间tmin=+∞,所有车辆离开交叉口的时间Z=+∞。
步骤2:计算tmin。
步骤3:确定当前车辆p的占用时间TVO(p),更新TCO和TO。
步骤4:根据先来先到原则,为后面车辆分配通行时隙[ts,te],计算进入核心区的时刻t。
步骤5:在时间集合[t,t+T,t+2T,t+3T,…,t+9T]中采样不同时刻的状态,通过章节2.3确定最优轨迹,其中T=0.05 s。若该轨迹满足约束条件,则确定TVO,TCO和TO;否则令t=t+Δt,再进行对轨迹的求解,其中Δt=0.5 s。
步骤6:循环进行步骤4和5,直至所有车辆都被分配好通行策略,算法结束。
当同一时刻有多辆车进入缓冲区时,可采用枚举法或遗传算法进行组合优化。
2.3 车辆轨迹重规划
车辆在缓冲区进行速度调整,完成从状态S0(v0,t0)到状态S1(v1,t1)的转变。对车辆而言,为保证底层控制器顺利执行路口控制器的控制命令,在缓冲区行驶时的加速度和轨迹曲率关于时间的一阶微分应确保连续。因此,本文采用五次多项式描述车辆的轨迹。
s(t)=c0+c1t+c2t2+c3t3+c4t4+c5t5
(4)
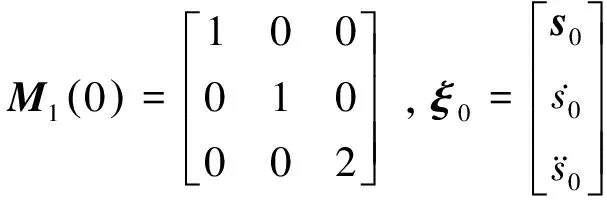
设定车辆进入缓冲区时,初始位置为0,则状态为[0v00],进入交叉口的状态为[lv10],其中l为车辆距交叉口停车线的长度。当路口控制器确定车辆始末运动状态时,便可以代入2个时刻的状态,对整个运动过程进行求解,得到五次多项式模型:
ξt(t)=M1(t)c012+M2(t)c345
(5)

(6)
(7)
对应本文的场景,选择的质量评估目标函数为
(8)
式中:C为质量评估目标函数;kj为舒适度的权重系数;ji为第i时刻的加速度一阶微分;ks为轨迹行为的权重系数。
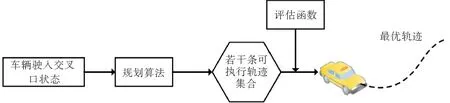
图7 轨迹评估示意
由于车辆的运动、动力学特性都存在极限,在完成所有备选轨迹的损失计算后需进行轨迹检查,过滤掉不符合制动限制的轨迹,本文场景所检查内容包括:
3 仿真实验及结果分析
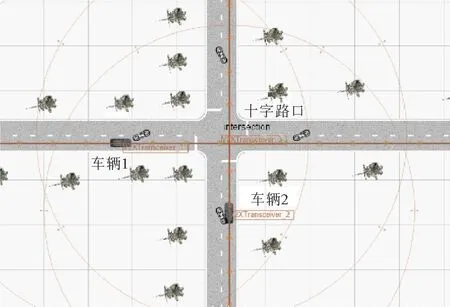
图8 十字路口交通场景
为了验证该算法的正确性和有效性,本文通过PreScan和Matlab/Simulink搭建一个双向两车道十字路口的仿真环境[10],如图8所示。
具体实验设置如下:
1) 道路宽度为3.5 m,交叉口停车线至中心的距离为6.25 m,最大转弯半径为40 m。
2) 路侧设备通信范围为100 m,通信频率为20 Hz。
3) 车辆均为BMW_X5,在自由区完成速度调整,保证进入缓冲区速度为7.5 m/s。
3.1 工况一
车辆1自西向东行驶,车辆2自南向北行驶。由图9可以看出,若两车按原定计划行驶,则在t=18.75 s时发生碰撞。若按照交叉口协调控制策略进行调控,车辆2先通过冲突点0,车辆1在t=19.5 s抵达交叉口停车线,则可避免产生冲突。
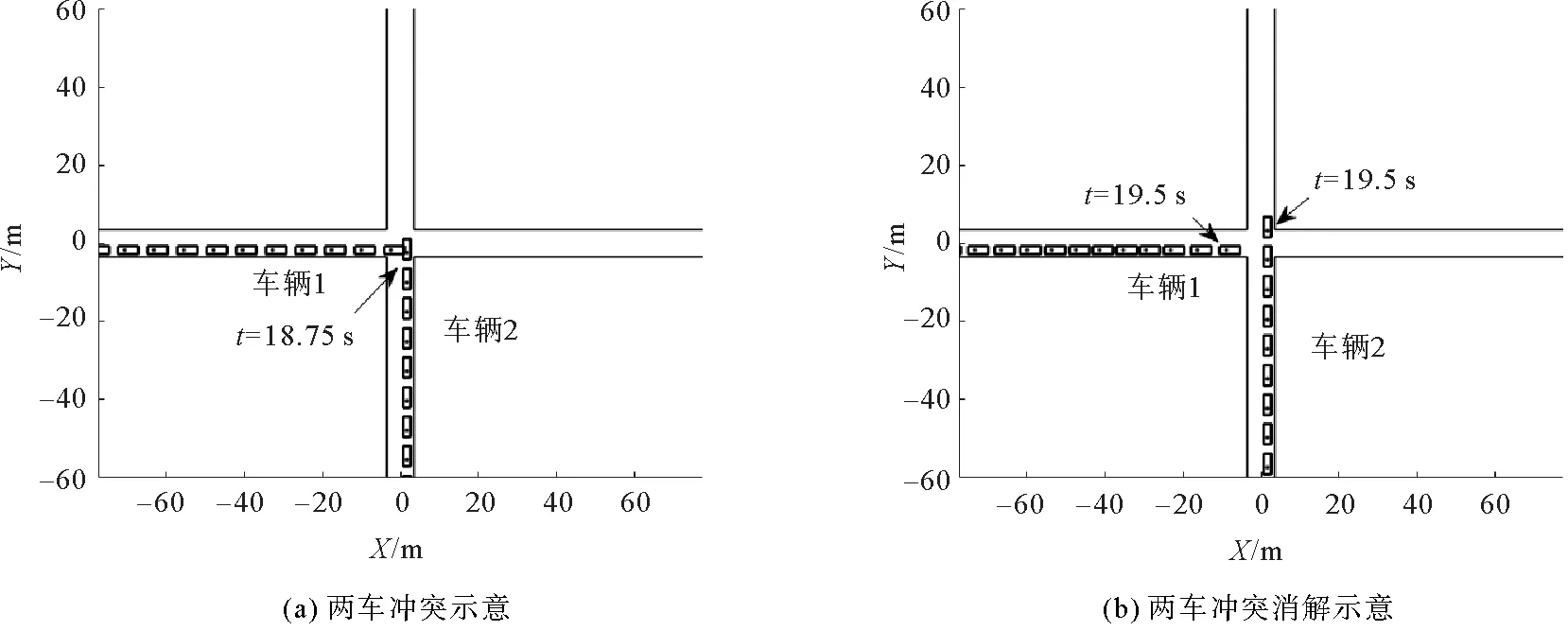
图9 两车控制前后所在位置对比
整个控制过程中,车辆1实现了“减速—加速”的速度调整过程,车辆2保持匀速行驶。由图10可以看出,经过控制之后,车辆1在缓冲区进行了速度调速,轨迹发生变化,进入路口前与车辆2保持了安全距离。
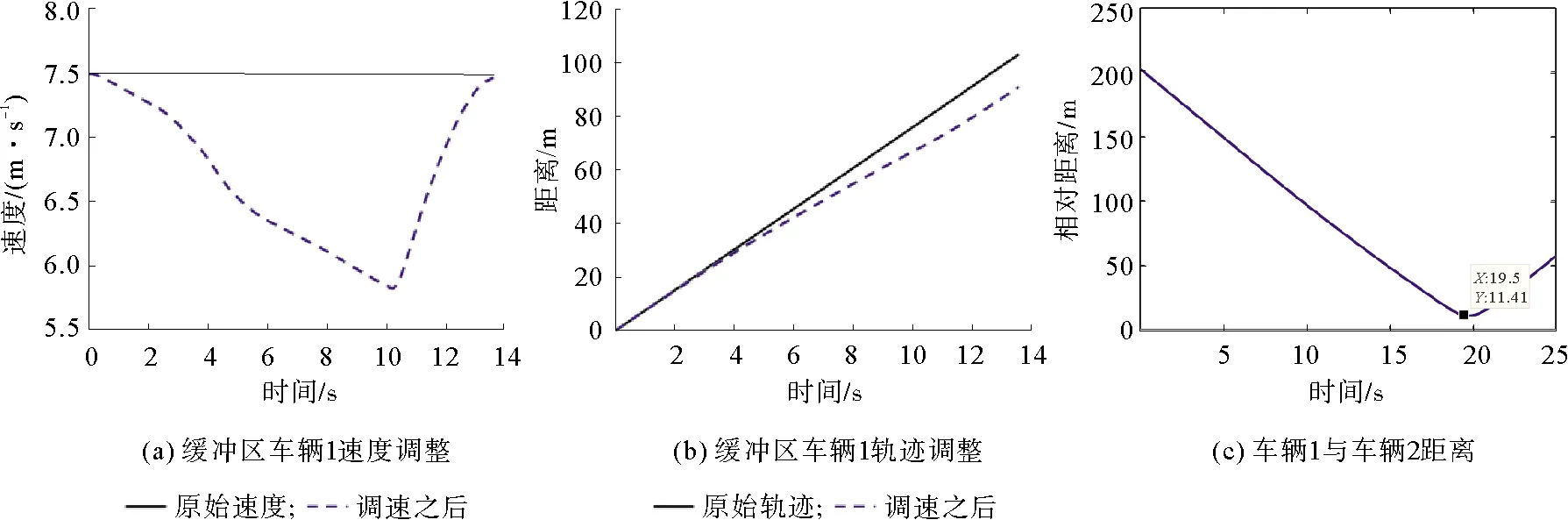
图10 车辆1调速前后运行状态
3.2 工况二
车辆1自西向东行驶,车辆2自南向北行驶,车辆3自东向西行驶。由图11可以看出,若3辆车按原定计划行驶,则在t=18.75 s时发生碰撞。若按照交叉口协调控制策略进行调控,车辆1,3先分别通过冲突点3,0和1,2,车辆2在t=20.2 s抵达交叉口停车线,则可避免产生冲突。
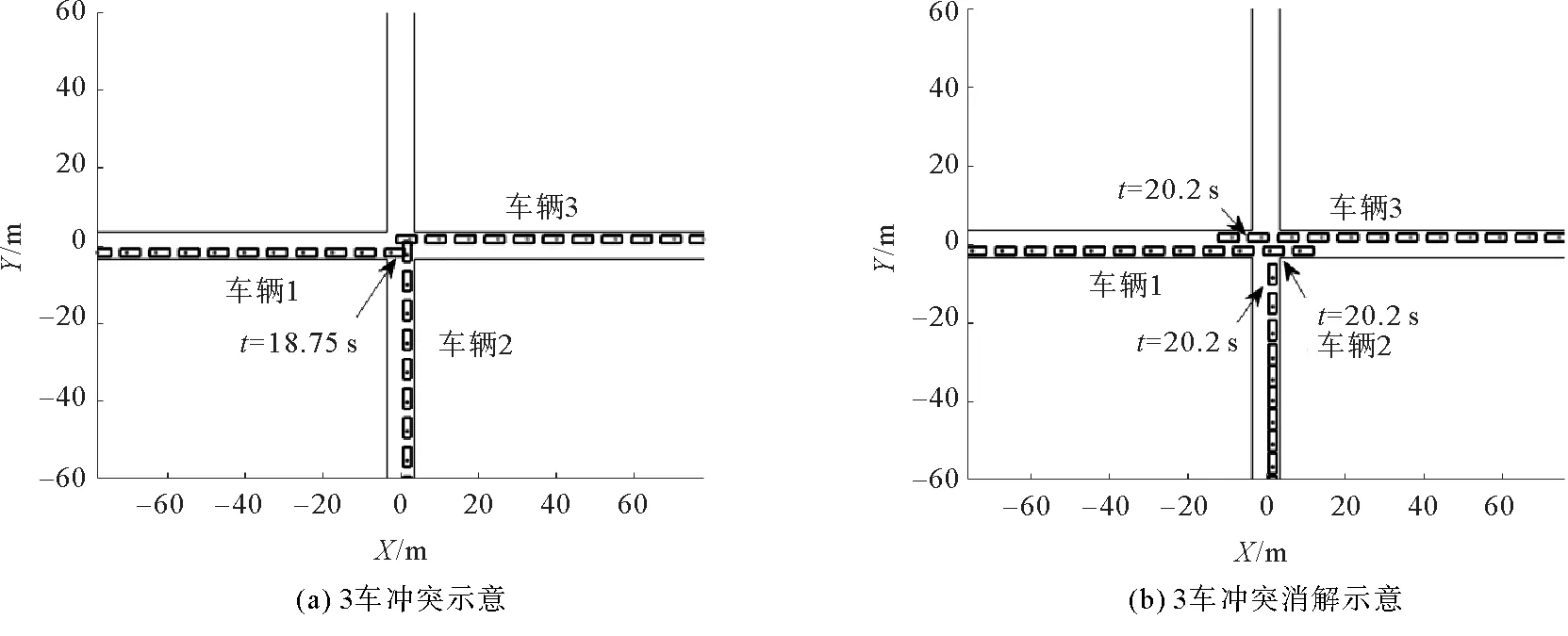
图11 三车控制前后所在位置对比
整个控制过程中,车辆1,3保持匀速行驶,车辆2实现了“减速—加速”的速度调整过程。由图12可以看出,经过控制后,车辆2在缓冲区进行了速度调整,轨迹发生变化,进入路口前与车辆1,3保持了安全距离。
3.3 工况三
车辆1自西向东行驶,车辆2自南向北行驶,车辆3自东向西行驶,车辆4自北向南行驶。由图13可以看出,若4辆车按原定计划行驶,则在t=18.75 s时发生碰撞。若按照交叉口协调控制策略进行调控,车辆2,4先分别通过冲突点0,1和2,3,车辆1,3在t=20.2 s抵达交叉口停车线,则可避免产生冲突。
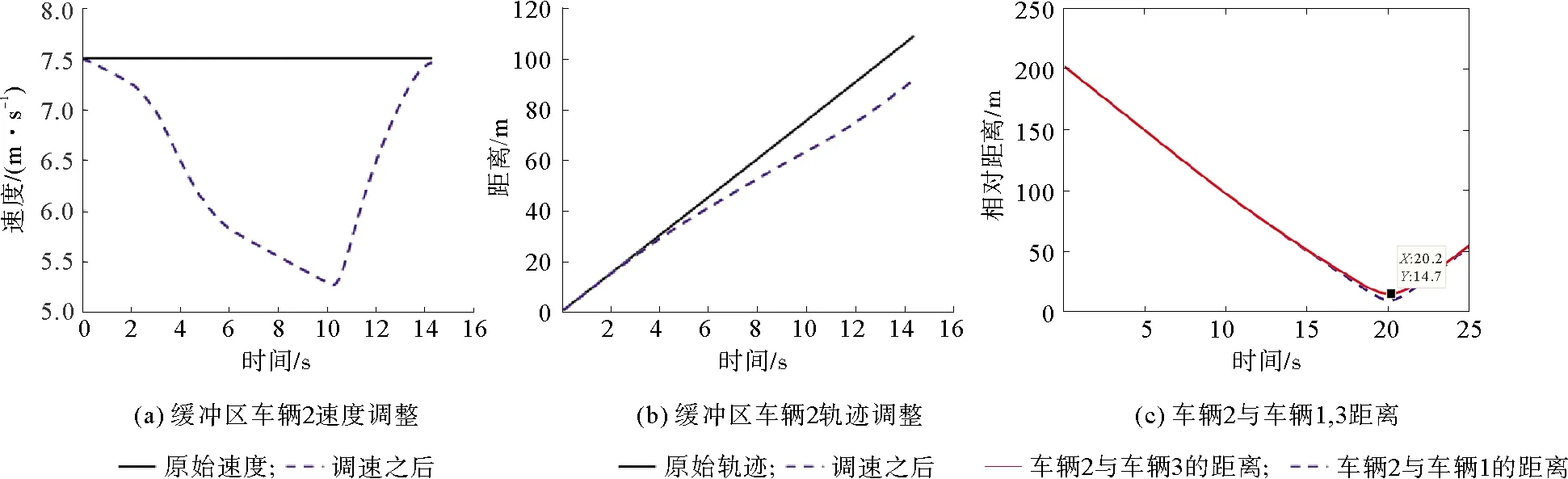
图12 车辆2调速后运行状态
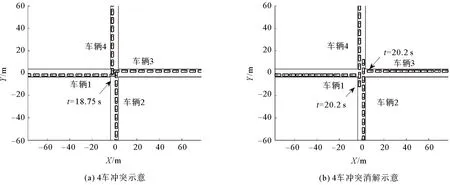
图13 四车控制前后所在位置对比
整个控制过程中,车辆1,3实现了“减速—加速”的速度调整过程,车辆2,4保持匀速行驶。由图14可以看出,经过控制之后,车辆1,3在缓冲区进行了速度调整,轨迹发生变化,进入路口前和车辆2,4保持了安全距离。
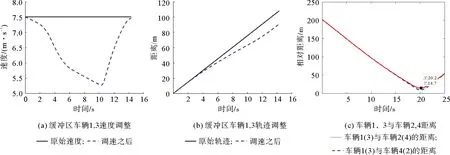
图14 车辆1,3调速后运行状态
从3组实验结果可以看出,通过路口控制器对车辆进行完全控制,避免了车辆冲突的产生,保证了车辆行驶轨迹的舒适性和平滑性,提高了交叉口的通行效率。
4 结论
针对无信号灯交叉口车辆冲突问题,本文设计了基于“冲突点占用”的交叉口协调控制系统,充分利用了路侧设备的通信范围及频率,实现对车辆的完全控制。通过车辆调度算法决策出最优通行策略,并利用五次多项式拟合轨迹曲线,保证了车辆在行驶过程中轨迹的舒适性及平滑性,避免车辆发生冲突,提高路口的通行效率,适合于车辆运行精度高的交叉口协调。
