小型码垛机器人机械手抓取装置设计
2022-03-08朱晓慧任延举杨得志
朱晓慧,任延举,杨得志,刘 鹏
(沈阳工学院,113122,辽宁抚顺)
1 码垛机械手的特性
机械手是最早出现的工业机器人,也是最早出现的现代机器人,是一种可以模仿人手和臂的某些动作功能的机械操作装置[1]。码垛机械手可以设置在狭窄的空间,由操作人员通过控制柜表面的操作显示屏进行操作控制,具有人机交互技术,从而实现信息的内部形式与人类可以接受形式之间的转换[2]。其仅仅需要更换不同类型手部即可代替人类对不同货物进行码垛或拆垛,轻松实现工业生产的机械化和自动化,既能解放劳动力,又能保护人的生命安全,同时又节约了开支。
2 码垛机械手的组成
码垛机械手系统主要包括控制系统、执行机构、驱动系统和位置控制装置等,其相互联系如图1 所示。

图1 机械手的系统配合关系图
3 抓取装置的设计
本设计改进的码垛机械手是研制开发的新机型,质量稳定,性价比高,码垛机械手的程序里所需要定位的只有两点,一是抓起点,二是摆放点,这两点之间运动轨迹全由电脑内主控制系统来控制,控制系统会寻找这两点间最合理的运动路线来控制机械手移动,所以教示方法极为简单。该机械手的运动是直线运动,存在对货物抓取效果较差的缺陷,为此我们设计一种码垛机器人抓取装置,解决抓取效果较差的问题。
3.1 结构表述
本设计的目的,在于优化码垛机器人抓取装置的货物抓取效果,解决现有码垛机器人对货物抓取效果较差的问题。
为实现上述目的,设计的抓取装置机械臂根部处的凹形板下设计连接有第一气缸,通过气缸的伸缩作用,带动凹形板下的连接板、第一活动板运动,从而实现夹板的抓取运动,与此同时,在夹板两侧也设计了伸缩气缸,即第二气缸,由第二气缸的伸缩运动带动加长板实现二次夹持,进一步保证夹持有效性,从而最终实现对物品的夹持。其具体结构形式如图2 所示。

图2 抓取装置设计结构图
3.2 驱动力分析
因所抓取的化工、饮料、食品、啤酒、塑料等自动生产线的物品重量有所区别,因此此处力学分析以其中较大重量、常用运动速度数值进行计算,具体分析过程如下。
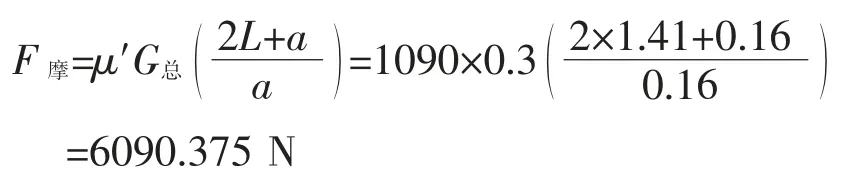
F摩是由机械手的对应结构和相应的导向截面形状决定的,不同的情况摩擦力不同,需要具体情况具体计算,计算如下:

公式(1)中:G总为参与运动的零件的总重量,N;L为所有参与运动的零件重心到前端的距离,m;a 为导向支撑长度,m;μ′为摩擦系数。

式中:μ 为静摩擦系数,钢对青铜取μ=0.1~0.15,钢对铸铁取μ=0.18~0.3。导向杆的材料选择钢,导向支撑选择铸铁,μ′=0.20×1.5=0.3。
估算(取较大值)G总=1 090 N,L=1.69-0.28=1.41 m,导向支撑长度a 设计为0.16 m。
将相关数据代入公式(1)进行计算:
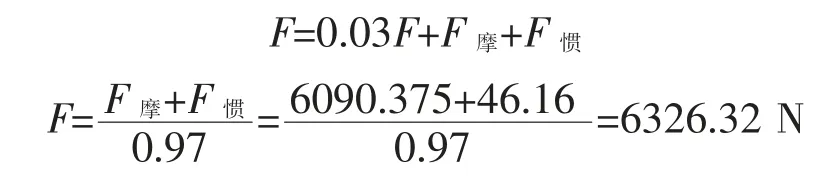
若手臂运行速度为v=5 m/min,启动过程需要花费时间为Δt=0.2 s,初始速度Δv=v=0.083 m/s,则手臂的惯性力计算如下:

连接处密封的总摩擦力可估算为:F封=0.03F 。
经过之前的论证分析,可得到该码垛机所需驱动力为:
4 设计总结
与现有技术相比,本设计的有益效果如下:
首先,设置两个第一气缸,同时带动移动板向上移动,可实现抓取深度的调节,通过设置以上结构,优化了机械手抓取装置的货物抓取效果,解决了现有码垛机器人对货物抓取效果较差的问题,从而节约了人力成本;其次,设置第二缓冲垫,可对货物进行缓冲,避免在抓取时对货物造成损伤;再次,设计了滑块与滑槽,有利于移动板在凹形板内腔滑动。因此,设计的该机械手抓取装置结构性能更为稳定,抓取灵活,克服了对货物抓取效果较差的缺陷。