基于RobotStudio的码垛机器人工作站仿真设计*
2022-10-20区娟兰陈晓康张权芳张天豪王少位
区娟兰 , 陈晓康 , 张权芳 , 张天豪 , 王少位
(泰州学院船舶与机电工程学院,江苏 泰州 225300)
通信作者:陈晓康(1987—),男,江苏连云港人,硕士,助教,研究方向为机器人运动控制。随着我国经济的飞速发展,码垛机器人在工业生产中的应用越来越广泛,国内有很多在生产或加工时有码垛需求的传统企业,开始由人工作业的搬运和码垛逐步向自动化码垛机器人作业转型[1-3]。然而,对于码垛产品体积较大或重量较重的情况,依靠人工码垛不仅作业强度大、效率低,而且具有较高的风险。因此,为适应我国社会化大生产的需求,提高工业生产中码垛的效率,降低生产成本和人工劳动强度,设计一套自动化码垛系统尤为重要[4-5]。
1 自动化码垛系统
1.1 研究方案
自动化码垛系统既可以利用实际机器人进行操作,同时结合一些相关设备在线编程来完成,又可以利用仿真软件离线编程进行设计。在线编程可以更好地观察轨迹运行过程中机器人的姿态变化,但是与离线编程相比,它需要占用机器人更多的工作时间和运行内存[6]。因此,课题组选用SolidWorks软件搭建机器人三维模型来进行运动分析,并利用RobotStudio软件作为基础平台来进行自动化码垛系统的仿真设计。
1.2 机器人本体建模
课题组在利用RobotStudio仿真软件进行自动化码垛系统仿真设计之前,采用SolidWorks三维建模软件搭建了一款与ABB IRB460码垛机器人相似的本体模型来进行运动学分析。机器人模型如图1所示,可以更好地掌握自动化码垛过程中机器人的运动状态,为本设计的实现奠定了理论基础,机器人的轴运动参数如表1所示。
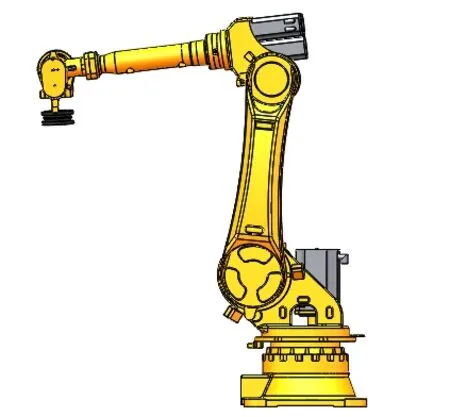
图1 码垛机器人的本体模型
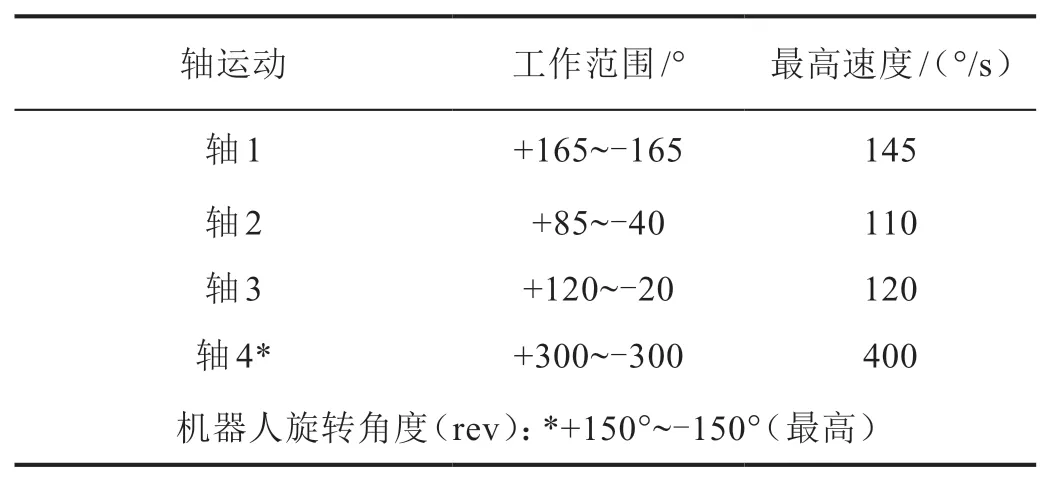
表1 码垛机器人的轴运动参数
1.3 码垛工作站搭建
课题组设计的自动化码垛系统采用RobotStudio软件进行虚拟工作站仿真设计,机器人在码垛物料时是左右开工的双边单码垛设计,搭建的码垛工作站如图2所示。
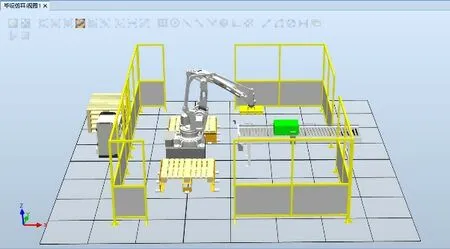
图2 码垛工作站设计
当安装在输送链上的面传感器检测到有物料在输送链上输送时,码垛机器人会按照设定的程序对物料进行抓取,先把物料放置在右侧,再抓取物料往左边放置,循环这个流程直到左右两边物料放置的层数都达到预定的码垛层数。自动化码垛工作站的作业流程图如图3所示。

图3 自动化码垛的作业流程图
1.4 码垛工件放置
根据大部分工厂使用的物料,可知码垛产品的具体参数,物料通常以大型箱体为主。课题组选用通用型长、宽、高分别为600 mm、400 mm、250 mm的物料箱作为研究对象。不同的码垛需求对物料的放置有不同的要求,课题组设计的码垛方式是每一层放置5箱,按照横3竖2放置,工件的码垛放置形式如图4所示。
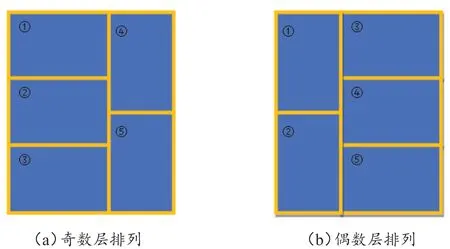
图4 码垛放置形式图
采用上述两种码垛方式,对于通用型的物料箱,通过自动化码垛系统将工作站中左右两侧托盘物料各放置3层,物料放置的效果如图5所示。
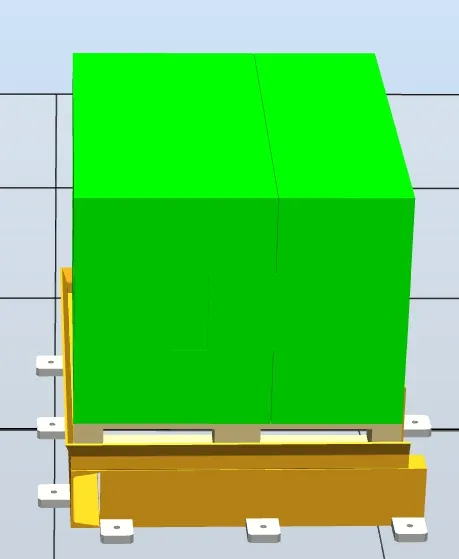
图5 物料放置效果图
2 自动化码垛仿真设计
2.1 I/O信号
I/O信号是用来与工作站创建的各个Smart组件进行信号交互的。它是工作站中自己创建的一种数字量信号,可通过将数字输入信号与系统的控制信号关联起来,达到控制系统的目的。I/O信号连接是指设定的I/O信号与Smart组件信号的连接关系以及各个Smart组件信号之间的连接关系。课题组设计的工作站利用I/O信号来实现在自动化码垛各部件之间建立通信连接,最终成功实现码垛作业。
2.2 Smart组件
Smart组件的设计用于使机器人抓取和放置物料及传送带传送物料的I/O信号产生交互和动态仿真,是整个自动化码垛结构设计工作站仿真的核心部分。课题组设计的工作站用到了许多的Smart组件,包括传送带组件SC-InFeeder,动作类子组件如Source、Attacher及Detacher,对象的队列组件Queue,本体子组件LinearMover,传感器组件Planesensor等。其中,真空吸盘组件SC-Gripper是比较重要的,它的工作逻辑如下:当传感器LineSensor检测到物料接触到传感器时,吸盘就会完成抓取物料的动作,物料到达托盘指定的位置后就会把物料放置好,真空吸盘组件逻辑设计关系如图6所示。
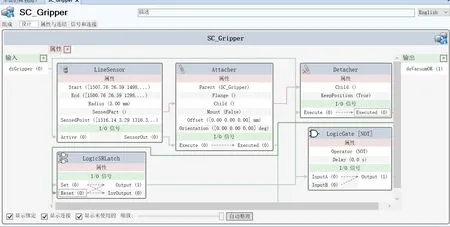
图6 SC-Gripper组件逻辑设计关系
2.3 程序设计
码垛机器人抓取和放置物料是码垛过程中相当重要的一部分。码垛机器人抓取和放置过程的部分代码如下:



3 仿真调试
课题组主要对自动化码垛系统进行了设计研究,并通过仿真软件对码垛系统进行了验证。从码垛工作站的搭建、码垛工件放置形式的设置,到I/O信号的设置以及信息流Smart组件的设计;然后根据产品码垛工艺的需求编制合理的程序;最后进行虚拟仿真,在仿真系统的环境中,验证I/O信号的检测是否准确、信息流的交换是否畅通,同时验证码垛工艺是否正确。最终仿真结果验证了自动化码垛系统的设计、配置和工艺的正确性,整个仿真工作站的成功可大幅度地提高码垛作业的效率,缩短码垛系统的开发周期,对于我国工业发展具有重要的现实意义[7-10]。
