ADS⁃B 系统监视性能评估研究与验证
2022-03-02李云双李冬霞刘海涛
李云双,杨 宁,李冬霞,刘海涛
(中国民航大学 电子信息与自动化学院,天津 300300)
0 引 言
航空器监视系统是一种利用不同航空设备,对空域内航空器飞行活动进行监视的电子系统。航空器监视系统是民航空中交通管制系统(ATC)的重要基础设施,其为管制员和飞行员提供所需的航空运行态势感知信息,可有效提高空中交通管制系统安全、空域容量与运行效率。
传统的航空器监视主要依赖一次监视雷达和二次监视雷达,但随着全球航空运输量的快速增长,空中交通流量持续增长,传统基于雷达的监视手段已不能满足空中交通管制的需求。广播式自动相关监视(Automatic Dependent Surveillance⁃Broadcast,ADS⁃B)是一种基于全球导航卫星系统和航空数据链的航空器协同监视系统,与雷达监视相比,ADS⁃B 具有监视信息更实时、数据精度高、建设成本低、维护方便等优势。
因此2003 年,国际民航组织(ICAO)在第十一届航行大会将ADS⁃B 确定为全球新航行技术的主要发展方向。2015 年中国民用航空局修订了《中国民用航空ADS⁃B 实施规划》,预计到2020 年底实现ADS⁃B OUT全面运行,2025 年完善我国ADS⁃B 运行网络。为了保障空中交通管制系统可靠运行,欧洲航行安全组织(EUROCONTROL)对接入空中交通管制系统的航空器监视数据提出了明确的要求,只有符合这些要求,航空器监视系统获取的监视数据才允许接入到空中交通管制系统。因此依据相关技术规范对航空器监视系统提供的监视性能进行评估具有非常重要的意义。
近年来,国内外航空界对ADS⁃B 监视系统的性能评估开展了大量研究。为了评测ADS⁃B 系统的完好性和数据精度,文献[6]将ADS⁃B 数据与雷达和GPS 数据进行比较,研究表明ADS⁃B 报文完好性为95%,数据精度最高可达33 m,ADS⁃B 性能优于雷达系统定位精度;为了评测ADS⁃B 系统位置精度、可用性指标,文献[7]通过将ADS⁃B 数据与GPS 数据进行比较,结果表明ADS⁃B 报告水平位置精确度在100 m 左右,可用性为81.78%;为了分析影响ADS⁃B 运行性能的不良因素,文献[8]结合高斯过程模型,对ADS⁃B 数据的精度及完好性、漏点、离散度和跳点进行统计;为了开展ADS⁃B 系统完好性的研究,文献[9]通过采集天津滨海国际机场及周边的ADS⁃B实验数据,统计分析得到了ADS⁃B 系统位置数据完好率达到98.8%以上。
文献[6⁃9]的研究工作中存在监视性能评估指标不够全面的问题。针对以上工作不足,依据EUROCONTROL技术规范,设计实现了航空器监视性能评估系统,并利用中国民航大学ADS⁃B 实验地面站获取的航空器监视数据,统计计算了14 个监视性能指标。
1 航空器监视系统性能评估方法
首先介绍了航空器监视性能评估系统的关键技术参考航迹构建方法,然后给出航空器监视性能评估系统的评价指标,最后详细介绍水平位置更新概率达标比率及相关错误水平位置比率的统计方法。
1.1 基于卡尔曼滤波的参考航迹构建
为了统计航空器监视系统的性能指标,需要构建被监视航空器的参考航迹。常用参考航迹构建方法包括卡尔曼滤波、粒子滤波等。鉴于卡尔曼滤波方法具有运算复杂度低的优点,因此本文采用了卡尔曼滤波的方法。
飞行过程中,航空器的状态表示为:

式中:()表示时刻航空器状态向量,()=[],表示时刻航空器位置,表示时刻航空器速度,表示时刻航空器加速度;(-1,)表示航空器从-1 时刻到时刻的状态转移矩阵;(-1)表示-1 时刻航空器飞行过程受到的过程噪声。
地面站接收到的航空器状态为:

式中:()表示时刻地面站接收到的航空器状态向量;为观测矩阵;()表示时刻的观测噪声,即监视数据在传输过程中受到的噪声。
卡尔曼滤波算法包括预测和更新两部分,步骤如下:

1)设定初值

2)预测
通过-1 时刻的最优滤波估计值预测时刻系统状态。
式中:(-1|-1 )为-1 时刻估计误差协方差矩阵;(-1 )为-1 时刻过程噪声的协方差矩阵。
3)更新
通过比较观测值与预测值的误差,对预测值进行修正得到最优滤波估计值。
式中:()为时刻滤波增益;()为时刻观测噪声协方差矩阵;(|)为时刻估计误差协方差矩阵。
1.2 航空器监视性能指标
根据EUROCONTROL 技术规范,监视性能评估指标共包含19 个,其中强制性指标12 个,其他指标7 个。受实验环境数据的限制,本文仅对指标中的14 个指标进行评估,这些指标是:水平位置更新概率达标比率、3D 位置丢失比率、正确气压高度更新概率、正确飞机标识更新概率、临近航空器相对时间均方根误差、相关水平位置错误报告比率、水平位置均方根误差、正确气压高度比率、航空器标识错误比率、垂直速度均方根误差、航迹水平速度均方根误差、航迹水平速度角均方根误差、虚假目标报告密度、接近真实航迹的虚假航迹数量。限于篇幅,下面仅详细给出水平位置更新概率达标比率及相关水平位置错误报告比率的计算方法。
1.3 水平位置更新概率达标比率
水平位置更新概率定义为规定时间内航空器能够提供水平位置信息的概率。根据EUROCONTROL 技术规范要求所有航空器航迹的水平位置更新概率必须大于等于97%,因此水平位置更新概率达标比率的计算方法如下:
1)参考航迹构建(参考1.1 节的描述)。
2)确定参考航迹的第一个测量间隔。
以参考航迹的第一个航迹点的时刻为中心,第一个测量间隔为[-2,+2 ],其中代表测量间隔(当空域采用3 海里水平间隔标准时,取值为5 s;当空域采用5 海里水平间隔标准时,取值为8 s)。
3)以测量间隔为分割的基本单位,对参考航迹进行分割。
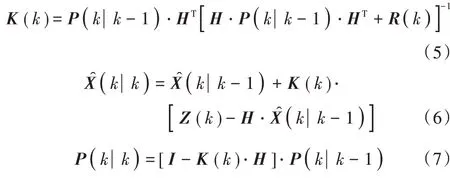
分割航迹后,第个测量间隔的起点时刻为(-1)+-2,第个测量间隔的终点时刻为(-1)++2,即 第个 测 量 间 隔 为[(-1)+-2,(-1)++2 ],如图1所示。
图1 测量间隔划分示意图
4)计算分割后的参考航迹的测量间隔的总数量,并记为N。
5)在分割的参考航迹中,统计计算至少包含一个航迹点的测量间隔数量,并记为N。
6)计算单个参考航迹的水平位置更新概率PU,公式如下所示:
7)统计评估区域内参考航迹的水平位置更新概率达标的比率公式如下所示:

式中:(PU ≥97%)为评估区域内满足水平位置更新概率≥97%的参考航迹数目;为评估区域内所有参考航迹数目。
1.4 相关错误水平位置比率
相关错误水平位置是指至少3 个连续航迹点的水平位置误差在指定阈值之上,且误差方向一致的集合。相关错误水平位置会干扰管制员对航空器飞行态势的判断,降低管制效率。相关错误水平位置比率定义为相关错误水平位置中所有的航迹点数与总的航迹点数的比值,计算方法如下:
1)构建参考航迹;
2)确定误差阈值,在5 海里水平间隔标准下误差阈值为926 m,在3 海里水平间隔标准下误差阈值为555 m;
3)计算每个参考航迹点的水平位置误差,并与误差阈值比较;
4)若参考航迹点的水平位置误差大于等于阈值,将误差沿着水平速度方向分解,如图2 所示;
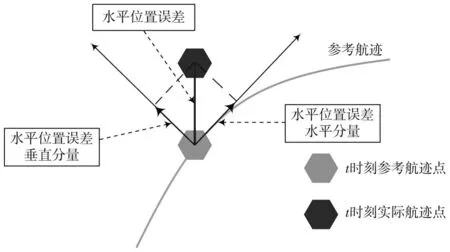
图2 水平位置误差分解示意图
5)计算该航迹点相邻航迹点的水平位置误差,并进行分解;
6)确定至少三个连续的水平位置误差超过阈值且误差分量方向相同的航迹点集合为一个相关错误水平位置;
7)重复步骤4)~步骤6),直到确定参考航迹内所有相关错误水平位置;
8)计算相关错误水平位置报告比率。

式中:表示所有相关错误水平位置中参考航迹点数量;为所有参考航迹点数量。
2 监视性能评估实验
为了评估ADS⁃B 系统监视性能,设计了航空器监视性能评估系统,并利用中国民航大学ADS⁃B 实验地面站,开展了天津机场终端区及高空航路监视性能的评估实验。
2.1 实验地面站与航空器监视性能评估系统
中国民航大学ADS⁃B 实验地面站坐标为东经117°20′57.85″,北纬39°5′58.76″,数据采集时间为2020年6月3日8:00—10:00,采集数据格式为ASTERIX CAT021。依据技术规范,设计实现了航空器监视性能评估系统,评估系统由三个模块组成,分别是数据处理模块、数据评估模块及评估结果显示输出模块。评估系统工作流程如图3 所示。
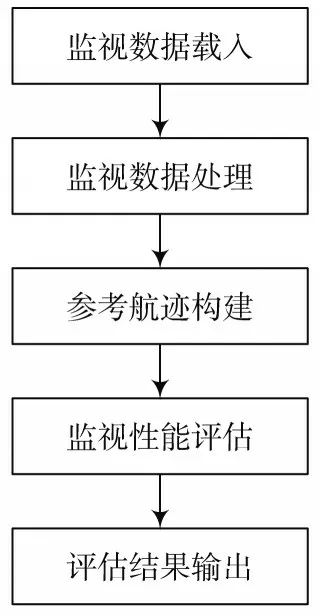
图3 航空器监视数据评估流程
监视数据评估系统包含以下5 个流程:
1)监视数据载入:从ADS⁃B 原始数据文件中提取ASTERIX CAT021 报文数据。
2)监视数据预处理:首先解析报文获得航迹点,并按照航空器标识对航迹点分类,然后滤除重复的航迹点,最后得到各航空器的航迹(Aircraft Trajectory)。
3)参考航迹构建:以航空器第一个航迹点作为坐标原点,将该航空器所有航迹点的经度、纬度和高度转换为直角坐标,然后通过卡尔曼滤波算法得到参考航迹(Reference Trajectory)。
4)监视性能指标计算:根据步骤3)获得的航空器参考航迹,依据技术规范对航空器的监视性能指标进行计算。
5)评估结果输出:监视性能指标可视化显示。
2.2 实验结果与分析
基于ADS⁃B 实验地面站提供的监视数据,开展了两个方面监视性能评估实验:天津机场终端区监视性能评估及高空航路监视性能评估。
2.2.1 天津机场终端区
为了评估天津机场终端区监视性能,首先对实验地面站获取的监视数据进行空域过滤,过滤条件为:以实验地面站坐标为圆心,半径小于90 km,飞行高度小于6 600 m 且大于300 m。过滤后符合条件的航班数为56 个。
假设终端区域采用3 海里水平间隔标准,按照规范要求将测量间隔设置为5 s,然后利用评估系统进行评估。得到评估结果如表1 所示。
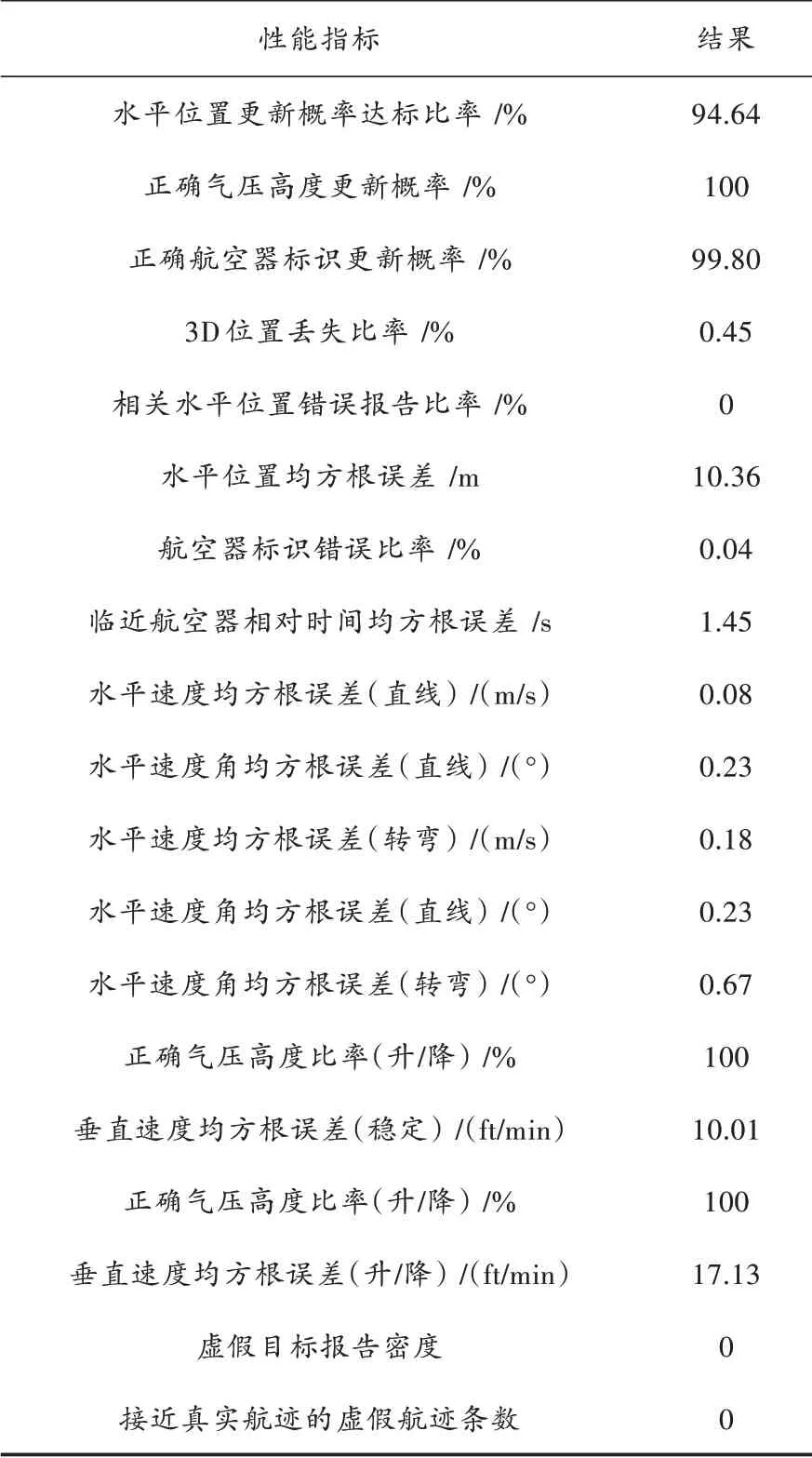
表1 天津机场终端区的ADS⁃B 监视性能
与规范比较发现,除了水平位置更新概率达标比率指标不满足要求以外,其他各项指标均满足技术规范的要求。规范要求:在终端区采用3 海里水平间隔时,100%航空器的水平位置更新概率≥97%。
为了进一步找出终端区水平位置更新概率达标比率降低的原因,进一步统计了飞行器高度对水平位置更新概率达标比率及3D 位置丢失比率两个指标的影响,得到如表2 所示的评估结果。
由表2 可观察到,随着飞行高度的降低,水平位置更新概率达标比率呈现下降的趋势,同时3D 位置丢失比率呈现增加的趋势。产生以上现象的原因是:在终端区,随着航空器飞行高度的降低,空⁃地信道的多径效应更显著,另外低空存在地物及建筑物的遮蔽效应,两个方面因素导致ADS⁃B 接收机正确接收消息的概率降低,最终导致水平位置更新概率达标比率下降及3D 位置丢失比率增加。

表2 飞行高度对ADS⁃B 监视性能指标的影响(终端区) %
2.2.2 高空航路监视
考虑到单个ADS⁃B 地面站覆盖空域是受限的,因此需要首先估算出ADS⁃B 地面站的有效覆盖半径。在实验数据中滤除终端区的数据,然后统计得到了航空器与地面站距离对水平位置更新概率达标比率及3D 位置丢失比率的影响,如表3 所示。
表3 表明:随着航空器与地面站距离的增加,水平位置更新概率达标比率呈现下降的趋势,另外3D 位置丢失比率呈现增加趋势。当航空器与地面站距离超过192 km 后,航班的水平位置更新概率达标比率将不满足规范的要求。
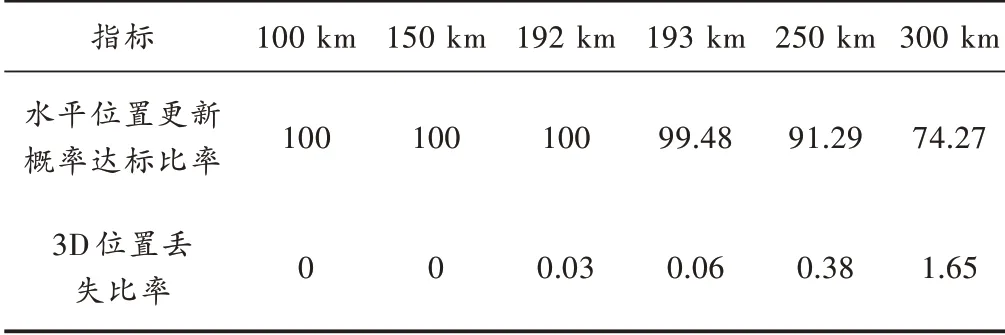
表3 距离对ADS⁃B 监视性能指标的影响(高空航路) %
利用以上得到实验地面站的有效覆盖半径,对监视数据进行过滤,过滤条件为:以实验地面站坐标为圆心,半径小于192 km,飞行高度大于6 600 m。过滤后剩余航班数为71 个。假设高空航路航线采用5 海里水平间隔标准,依据规范将测量间隔设置为8 s,并运行评估系统得到结果如表4 所示。
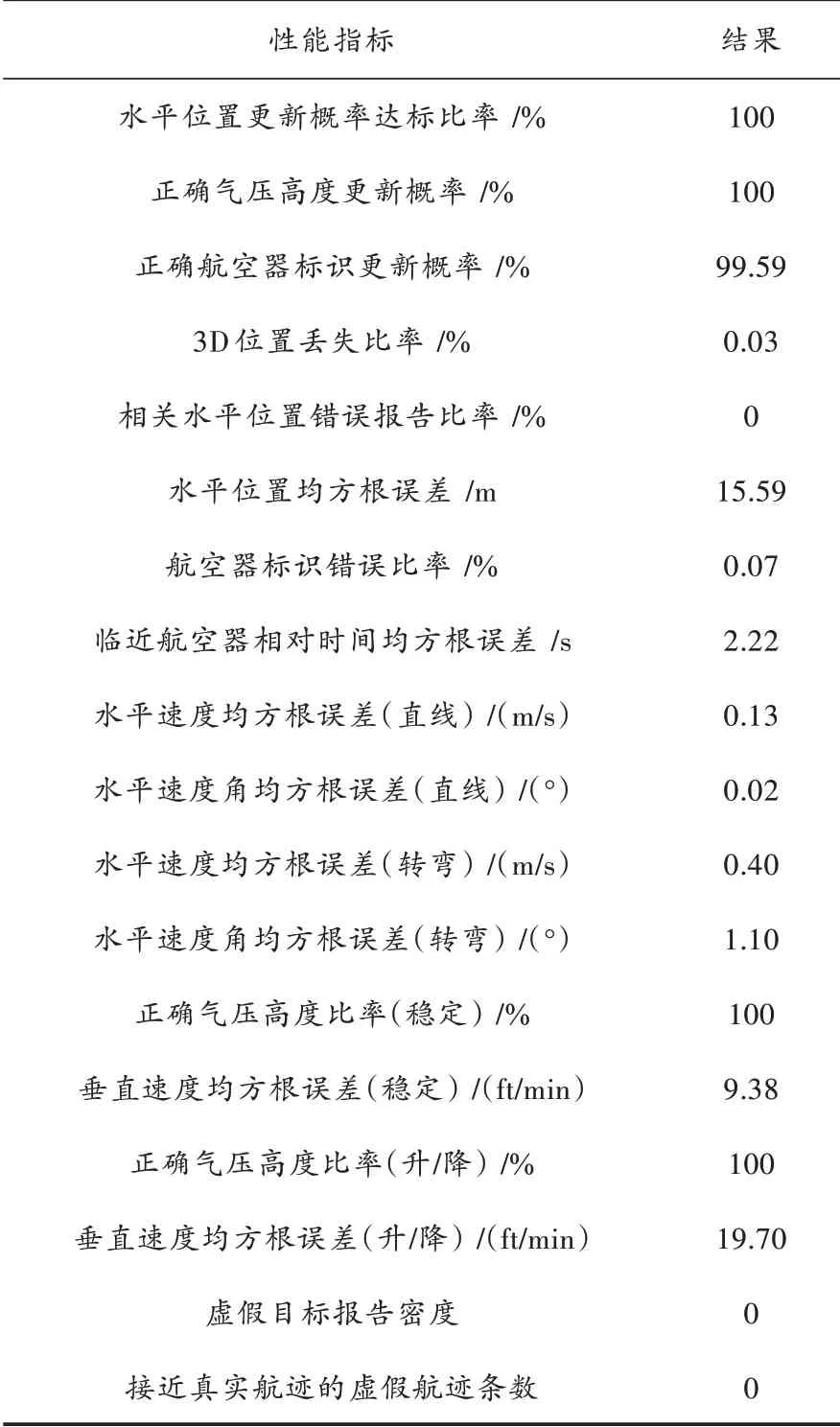
表4 ADS⁃B 地面站的监视性能(高空航路)
表4 结果与技术规范比较表明:实验地面站在有效覆盖空域内,统计的性能指标满足5 海里水平间隔标准的监视性能。
3 结 语
针对ADS⁃B 系统监视性能评估的问题,依据欧洲航行安全组织的技术规范,设计实现航空器监视性能评估系统,并利用中国民航大学ADS⁃B 实验地面站的监视数据,开展了天津机场终端区及高空航路航线的监视性能评估。评估结果表明:
1)在天津机场终端区,ADS⁃B 实验地面站提供的监视性能尚不满足3 海里水平间隔的监视性能需要,其中水平位置更新概率≥97%的航班比例不能达到100%的要求。产生以上情况的原因是:在天津机场终端区航空器密度较大,ADS⁃B 消息容易产生冲突,此外航空器低空飞行时由于多径传播及低空地物及建筑物的遮拦效应,使得ADS⁃B 接收机正确接收消息的概率降低;
2)在高空航路航线性能评估中,ADS⁃B 实验地面站的有效覆盖半径为192 km,在有效覆盖空域内,所评估的14 个指标均满足5 海里水平间隔的监视性能要求。
以上研究结果对ADS⁃B 系统建设的指导意义为:首先,在高空航路航线监视中,可沿航路航线部署多个ADS⁃B 地面站,以实现区域管制区的有效监视覆盖;其次,在机场终端区,为了降低因ADS⁃B 消息冲突、多径传播和建筑物遮拦效应而导致ADS⁃B 监视性能下降的影响,建议联合使用ADS⁃B 与其他监视手段以提高终端区的监视性能。
