磁悬浮制冷离心压缩机停机气流冲击抑制研究
2022-02-25胡余生李立毅郭伟林李雪
胡余生, 李立毅, 郭伟林, 李雪
(1.哈尔滨工业大学 电气工程及自动化学院,黑龙江 哈尔滨 150001;2. 珠海格力电器股份有限公司,广东 珠海 519070;3.广东省高速节能电机系统重点实验室,广东 珠海 519070)
0 引 言
磁悬浮轴承是一种新型高性能轴承,利用可控电磁力将转子稳定悬浮于给定位置,具有无机械磨损、不需要润滑的优点,广泛应用于各种高速、真空环境[1-3]。当磁悬浮轴承应用于制冷离心压缩机时,停机瞬间强烈的气流冲击导致转子的悬浮精度变差,甚至发生失稳,因此,为了保证磁悬浮离心压缩机的稳定性,磁轴承的抗冲击能力至关重要。目前,磁轴承的抗冲击控制主要包括刚度阻尼抑振与干扰补偿等方法。
磁悬浮轴承刚度阻尼可调,被广泛应用于转子系统的主动抑振中[4-5]。当应用磁轴承的系统受到不同形式冲击时,其刚度阻尼可调的特性就为冲击抑制提供了有效的手段,使得磁轴承在受到扰动力时能够保持转子稳定悬浮。Alexei等人[6]提出一种电磁阻尼器,该装置在不施加旋转阻力及产生负刚度的情况下可有效抑制转子横向运动,并成功应用于井下天然气压缩机。Lee等采用有限元方法,推导了单转子系统在冲击作用下的时程分析方程,并进行了相关的试验研究。试验表明,转子的瞬时响应与冲击载荷的作用时间关系密切,特别是当冲击频率为1/( 2×冲击时间) 时,转子的响应最明显,有限元计算和试验结果吻合得也相当好[7]。Masahiko等[8]针对电磁力非线性引起的谐波共振,研究了用于超导磁悬浮轴承的电磁分流阻尼器,结果表明,电磁分流阻尼器可抑制1/2阶的次谐波共振。史力等人[9]对某采用磁力轴承的电机在相关规范规定的水下爆炸冲击作用下的瞬态响应进行分析,计算中考虑了不同轴承刚度对冲击结果的影响。阻尼器等装置会导致系统结构复杂,而变刚度、变阻尼的参数调节过于依赖设计者经验。
干扰补偿通过状态观测器对被控对象所受的扰动进行补偿,可提高系统的抗干扰能力与鲁棒性[10-14]。韩京清[15]提出自抗扰控制,其继承了传统PID控制的优点,并能够对系统未建模部分及外界未知干扰准确的估计与补偿,但所需调节的控制参数较多,限制了其在实际工程的应用。为此,Gao等[16]提出了线性自抗扰控制技术,利用线性方式实现自抗扰控制,减少了控制参数的调节难度,使线性自抗扰控制在很多领域得以发展。李书培等[17]将粘弹性自抗扰控制(active disturbance rejection control,ADRC)应用到常见的二阶系统中,研究结果表明,主动粘弹性控制技术抗高频扰动、抗冲击扰动的性能优异,但粘弹性控制存在响应速度慢的问题。而磁悬浮离心机停机气流冲击具有激励时间短、载荷变化快的特点,对响应速度要求高,本文将设计改进的线性自抗扰控制方法(improved active disturbance rejection control,IADRC)通过构建线性状态误差反馈动态方程,使其仅与位移观测量有关,降低自抗扰控制对扩张状态观测器状态变量的依赖性,解决因观测误差导致控制量计算不准确以及系统对扰动响应慢的问题,增强扰动补偿控制效果。最后,通过仿真、实验与传统线性自抗扰控制方法进行比较,验证本文所提控制方法的优越性。
1 气流冲击影响分析
图1为磁悬浮离心机起停时序图,考虑到电机频率瞬间降为0,气流冲击应该是突变脉冲且脉冲数值不断减小,模拟脉冲冲击是一个趋势递减的随机冲击,记为fr(t)。

图1 磁悬浮离心机起停时序图Fig.1 Timing diagram for starting and stopping of magnetic suspension refrigeration centrifugal compressor
为方便分析气流冲击对转子悬浮精度的影响,考虑使用两种函数形式的信号拟合随机脉冲力,脉冲冲击信号图如图2所示,分别为指数拟合与线性拟合。

图2 模拟气流脉冲冲击信号图Fig.2 Signal of simulated airflow pulse impact
在气流冲击力作用下,转子所受合力为
(1)
式中:m为转子质量;F(t)为电磁力。
系统闭环加入控制电流i后,控制器对转子必须提供类似于弹簧支承的恢复力和阻尼来衰减振荡,这就要求所加的力要正比于位移和速度。
假定刚度k和阻尼d为所需值,则对应于位移x,电磁轴承力为

(2)
式(2)代入式(1),有
(3)
式(3)对应的齐次微分方程特征方程为
mλ2+dλ+k=0。
(4)
特征方程的两根为:
(5)
因此,齐次微分方程的通解为
(6)
求取全解时,分为以下两种情况:
1)指数拟合气流冲击:fr1(t)=a1e-b1t。
方程(3)全解为
(7)
2)线性拟合气流冲击:fr2(t)=-a2t+b2。
方程(3)全解为
(8)
进一步,冲击力的形式是十分复杂的,诸如线性函数形式与指数形式进行合成的冲击力形式。由式(7)、式(8)可以看出,转子在扰动力作用下的振动幅值由冲击力大小和系统的刚度阻尼决定。如果将扰动力进行实时补偿,就可以从根本上降低或消除扰动对转子悬浮精度的影响。
2 控制器设计
2.1 磁悬浮轴承转子数学模型
磁轴承刚性转子各自由度独立控制,在外扰力作用下,转子运动状态方程为:
(9)
式中:Ki为磁轴承的电流刚度;Kx为位移刚度。
由此可知,磁悬浮转子运动方程为以电流i为输入、转子位移x为输出的二阶系统。为了迅速抑制干扰力对转子悬浮控制的影响,通过自抗扰控制器对系统中的扰动进行估计和补偿,提高系统的抗扰能力。


图3 磁悬浮轴承自抗扰控制系统结构图Fig.3 Structure diagram of magnetic bearing with ADRC
为了防止观测的扰动过大,取x3=fr(t)/m作为系统扩张的状态变量,将气流冲击看成能量有界的扰动,且扩张状态变量导数有界,h为x3的微分,扩张状态变量后的转子运动状态方程为:
(10)
2.2 状态观测器动态方程
LESO用于反馈系统状态变量和扰动观测,基于转子运动状态方程及观测量与状态量之间的偏差,建立观测器动态方程为:
(11)
式中:z1、z2和z3为状态变量;β1、β2和β3为观测器增益。
令e1=z1-x1、e2=z2-x2、e3=z3-x3,由式(10)、式(11)可以得到观测器误差矩阵为

(12)

合理地选择观测器增益就会使得矩阵A稳定,且β3远大于h,就会有ei→0,i=1,2,3。
LESO的性能对扰动观测有较大影响,一种有效选择LESO参数的方法是利用带宽的概念将LESO的参数转化为扩张观测器的带宽ω0[18],为了使观测器误差趋于零,线性状态观测器误差特征方程需要负实部的根,将特征方程简化为
(13)
因此,观测器增益参数为
(14)
2.3 线性状态误差反馈动态方程
为了实现对被控对象内、外部扰动的抑制,线性自抗扰控制器在估计出总扰动f的估计值z3后,需要对其进行反馈补偿,控制量为
(15)
传统线性状态误差反馈动态方程将观测状态变量进行线性组合,且系统中不存在积分,其动态方程表示为
u0=kp(R-z1)-kdz2。
(16)
但传统的线性状态误差反馈动态方程不再适用于磁悬浮轴承自抗扰控制,主要原因有两方面:
1)积分缺失。
将式(15)代入式(10),转子运动方程为
(17)
此时,系统不再是传统线性自抗扰控制表现出来的串联积分环节,因此为了消除控制静差,在设计线性状态误差反馈动态方程时必须考虑积分项。
2)控制量依赖观测器估算的准确性。
当外部干扰过强时,扩张状态观测器对系统误差的估计能力将减弱,而对z1、z2估算的准确性直接决定系统对扰动的控制量。
因此,综合考虑以上两个因素,为了增强扰动补偿控制效果,消除因观测误差导致控制量计算不准确、系统对扰动响应慢的问题,构建新的线性状态误差反馈的动态方程,将z1作为唯一的反馈状态变量,z2仅用于扩张状态观测器过程计算,z3用于扰动补偿环节,改进自抗扰控制器结构如图4所示。

图4 改进自抗扰控制器系统结构图Fig.4 Structure diagram of IADRC
此外,当线性自抗扰控制用于参考信号需要变化的场合时,参考信号的突变会导致微分输出纹波大,因此,对微分环节进一步改进为
(18)
进一步,微分项的离散化与频域表达式为:
(19)
因此,构建的线性状态误差反馈的动态方程为
(20)
将式(20)代入式(17),可得
(21)
此时,闭环系统的传递函数为
(22)
根据劳斯稳定判据, 该系统稳定的充要条件为
(23)
因此,改进自抗扰控制器参数主要是kp、kd、ki、ω0的选取,参数合理选取有助于达到最优的控制效果。
3 仿真分析与实验验证
3.1 仿真分析
搭建仿真模型验证所提方法的有效性,给定冲击信号作为磁悬浮转轴的停机气流冲击力,该冲击信号为随机方波脉冲叠加高频正弦波信号,作用持续时间为1.5 s,如图5所示。给定转子悬浮中心位置为0.3 mm;转子质量为10 kg;位移传感器增益为5 000 V/m;电流环等效增益为1 A/V。

图5 仿真中脉冲冲击信号及其作用时刻图Fig.5 Diagram of impact signal and duration
对转子施加相同的扰动作用力,3种控制方法的转子悬浮精度如图6所示,改进线性自抗扰控制方法抑制冲击的效果优于其他两种控制算法,其转子实时位移精度较PID提升97.76%,较传统线性自抗扰控制提升81.33%,且恢复稳定时间最短。

图6 控制效果对比图Fig.6 Comparison of the control effect

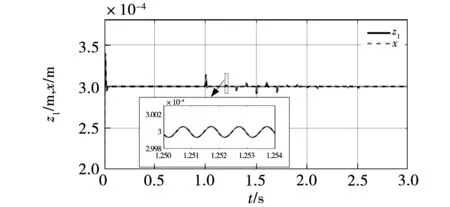
图7 LESO对x的估计值z1Fig.7 Observer effect of z1 on x

图8 LESO对dx/dt的估计值z2 Fig.8 Observer effect of z2 on dx/dt
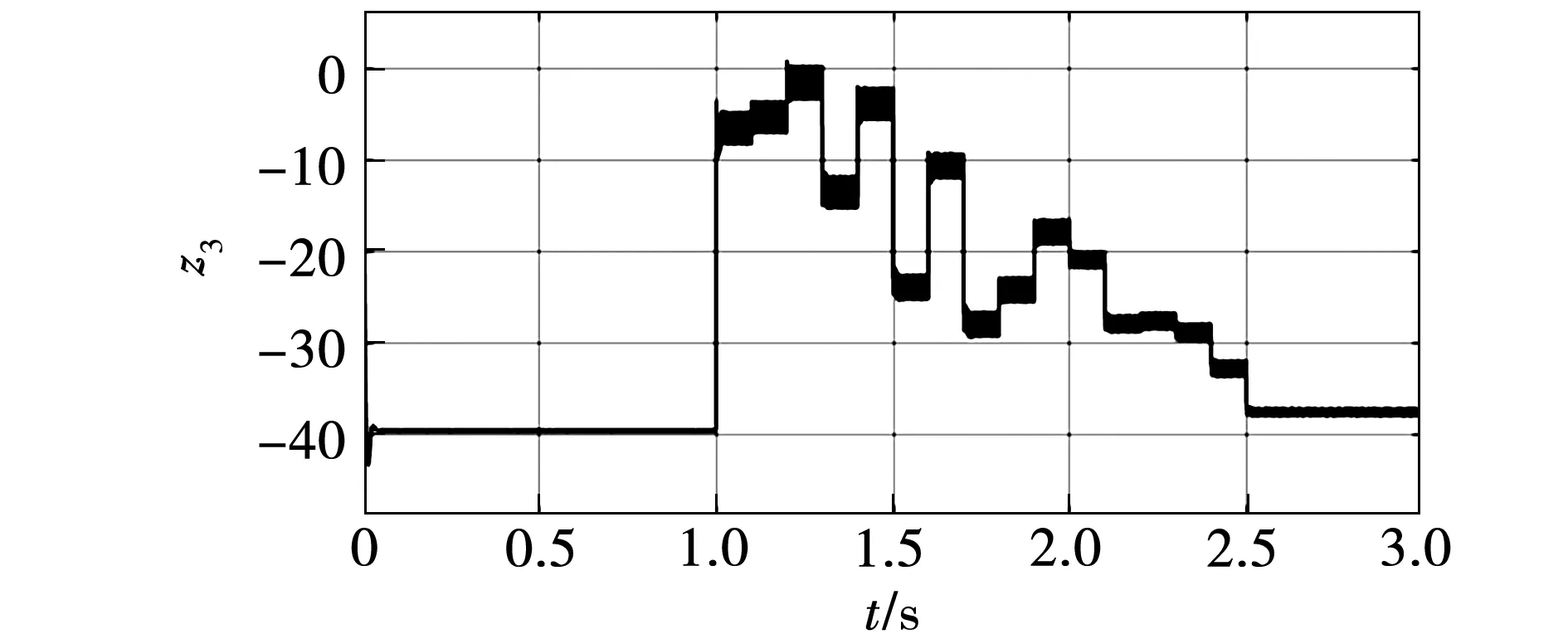
图9 LESO对总扰动的估计值z3Fig.9 Total disturbance estimates z3
在随机扰动作用下,控制量随着扰动信号发生变化,如图10所示。可以看出,控制量输出的实时改变能抑制不同大小干扰对控制系统的影响,体现出良好的鲁棒性和抗干扰性。

图10 控制量uFig.10 Control u
3.2 实验验证
为了进一步验证所提出算法的应用效果,分别在磁悬浮工装与磁悬浮制冷离心压缩机平台进行算法实验。
3.2.1 锤击实验
磁悬浮工装由5自由度磁悬浮轴承构成,如图11所示。只用于静态悬浮实验,轴承控制器由主控制器DSP、功率放大器和电源系统组成。其中:主控制器负责磁悬浮算法的处理,是整个控制器的核心;功率放大器负责将控制信号转换成控制电流给电磁线圈;电源系统为主控制器和功率放大器供电。

图11 磁悬浮调试工装Fig.11 Magnetic bearing test device
在转子静态悬浮稳定的前提下,在同一高度、相同角度让胶锤落下做自由落体运动,从而保证对转子施加相同大小的径向锤击扰动力。
图12、图13分别为前、后轴承x方向转子位移波形。由抗冲击实验位移波形可知,施加同样的锤击扰动力,采用改进线性自抗扰控制,前x位移波动由518.75 mV减小到343.75 mV,悬浮精度由51 μm降低到34 μm;后x位移波动由687.5 mV减小到513.75 mV,悬浮精度由68 μm降低到51 μm,转子从受冲击起到恢复稳定悬浮的时间由175 ms降低到120 ms。由此可见,改进的线性自抗扰控制可以很好地抑制外扰力对转子悬浮精度的影响。

图12 传统线性自抗扰下转子悬浮精度Fig.12 Suspension accuracy of rotor with ADRC

图13 改进线性自抗扰控制下转子悬浮精度Fig.13 Suspension accuracy of rotor with IADRC
3.2.2 高压差停机实验
图14为搭建的磁悬浮制冷离心压缩机实验平台。该平台的吸气管、排气管分别与蒸发器、冷凝器连接,变频器负责高速永磁同步电机驱动。磁悬浮压缩机采用双级叶轮进行压缩,且叶轮为对置式的布局方式,两级叶轮沿轴向水平背靠背放置于轴系最两端,一级叶轮位于前轴承侧,二级叶轮位于后轴承侧。

图14 磁悬浮制冷离心压缩机实验平台Fig.14 Experimental platform of magnetic suspension centrifugal compressor
高压差工况下,冷冻水出水水温5 ℃,冷却水进水水温33 ℃,磁轴承的负荷最大,停机时气流冲击对转子悬浮精度有较大影响。由于排气端位于后轴承侧,停机瞬间气流冲击对后轴承影响最大,因此主要对比后轴承转子悬浮精度的变化。
图15、图16分别为前轴承、后轴承x方向转子位移波形。对比传统线性自抗扰与改进线性自抗扰的转子位移,改进型自抗扰算法抗冲击效果明显,后轴承最差位移波动由793.75 mV减小到475 mV,悬浮精度由79 μm减小到47 μm,转子悬浮精度改善40%。由于停机过程中气流冲击由强变弱,始终作为扰动作用于转子,转子位移精度受其影响,此处着重关注转子精度的变化。

图15 传统线性自抗扰下转子悬浮精度Fig.15 Suspension accuracy of rotor with ADRC

图16 改进线性自抗扰控制下转子悬浮精度Fig.16 Suspension accuracy of rotor with IADRC
可见,提出的改进线性自抗扰控制方法可有效提高停机起来冲击下转子的悬浮精度。
4 结 论
本文针对磁悬浮制冷离心压缩机停机气流冲击问题,进行了改进线性自抗扰控制的研究,通过对磁悬浮转子运动方程进行分析,构建新的线性状态误差反馈的动态方程,使其仅与位移观测量有关,同时增加了积分环节,考虑到线性自抗扰控制可用于参考信号需要变化的场合,将对误差的微分改进为对位移反馈量的微分,最后根据稳定判据给出了系统稳定的充要条件。仿真对比了传统线性自抗扰、改进线性自抗扰及PID控制算法的抗冲击能力,改进线性自抗扰控制方法抑制冲击的效果明显优于其他两种控制算法。为进一步验证提出方法的有效性,分别在磁悬浮工装与磁悬浮压缩机实验平台进行了锤击实验与高压差停机实验,实验结果表明,改进线性自抗扰控制方法下,转子悬浮精度有效提高,从而提高了磁悬浮系统的可靠性。
