基于VSG 的风光火打捆系统暂态稳定性分析
2022-02-23余明昊宋立琴
戴 尧 ,王 睿 ,余明昊 ,宋立琴
(1.天津华电福源热电有限公司,天津 301799;2.国网天津市电力公司武清供电分公司,天津 301700;3.国网冀北电力有限公司廊坊供电公司,河北 廊坊 065000;4.华北电力大学,河北 保定 071003)
0 引言
由于自然环境不断恶化,减少对传统火电的依赖成为必然趋势。在我国,风、光等新能源的建设分布与我国的用电需求在空间分布上有逆向趋势。所以,将电能外送便成为了解决新能源发电、用电不平衡问题的首选方法。
以风光火打捆系统为基础,将电能送至电能消纳能力强的地区能缓解电力不平衡消纳情况。但新能源的高比例并网会引起系统送端惯量和暂态稳定裕度的下降[1]。目前,以虚拟同步机策略(Virtual Synchronous Generator,VSG)作为改善新能源高比例并网引起的送端惯量问题的方法虽已被广泛接受,但还未有研究将其与风光火打捆系统相结合。因此,需要对典型风光火打捆外送系统的暂态稳定性及其惯量提升问题进行深入研究。
目前,针对风火打捆或光火打捆系统的各方向以及虚拟同步机策略已有了较为深入地研究。文献[2-4]从理论和仿真等方面分析了多种不同指标对风火打捆外送系统暂态稳定性的影响机制,并提出了控制算法方面的改进。而虚拟同步机策略,文献[5-6]从基础原理、实现方法和控制目的等方面介绍了应用于风电和光伏的VSG 控制策略的相关概念,总结了VSG 控制策略的研究现状。文献[7]以双馈风电机组参与有功调频后稳定运行为目标,提出了一种以风速和频率偏差值为参考的虚拟同步机参数自适应控制。但总体上看,针对风光火打捆系统以及结合虚拟同步机策略的送端惯量提升问题的研究较少,需要进一步探索。
本文基于PSCAD 软件,搭建了风光火打捆外送系统的基础模型,在新能源机组中引入VSG 策略,结合仿真分析了VSG 策略的有效性及转动惯量系数J和阻尼系数D对打捆系统暂态响应的影响。并在新能源机组的VSG 控制策略中引入了系数J自适应控制策略,结合仿真验证了其有效性。旨在为风光火打捆电网送端系统的建设与运行提供帮助和参考。
1 风光火打捆交直流混联系统建模
1.1 光伏系统模型
光伏发电系统主要由光伏电池阵列、并网换流器及其内部控制模块组成。总体仿真模型如图1所示。

图1 光伏发电系统模型
依据光伏电池的内部参数,经过化简便能得出可用于工程计算的光伏电池组的模型表达式
式中:Isc、Im分别为短路电流和最大功率点的负载电流;Uoc、Um则分别为开路电压和最大功率点的负载电压。
在d-q-0坐标系下,光伏机组换流器的机电暂态等效方程为
式中:Ed、Eq、id、iq为换流器交流电压和交流电流的d、q分量;L为连接电抗;f为系统频率;Ud、Uq为电网侧电压的d、q分量;R为连接电阻;s为微分算子。
1.2 双馈风电机组模型
本文以双馈风电机组作为风光火打捆系统送端风电部分的仿真模型对象。DFIG 相对异步风力发电机和直驱式交流永磁同步发电机等类型的风机具有风能转换效率高、可靠性高、调度灵活、经济性好等一系列优点。DFIG 仿真模型的主体部分主要由风轮机、发电机、换流器模块以及电气控制、轴系传动模块等部分组成,如图2所示。

图2 风电机组模型框图
双馈风电机组的运动过程可以使用电压、磁链等方程组来表示。双馈风机的电压方程组分为定、转子电压方程两部分
双馈风力机组的定、转子磁链方程为
转矩运动方程为
式(3)—(5)中:ud1、ud2、uq1、uq2分别为机组定、转子侧电压 的d、q轴分量;id1、id2、iq1、iq2分别为机组定、转子侧电流的d、q轴分量;ψd1、ψd2、ψq1、ψq2分别为定、转子磁链的d、q轴分量;np为发电机的极对数;T1、T2分别为电机的拖动转矩和电磁转矩;ω、ωs分别为转子机械角速度和d、q坐标下相对于转子的角速度;L1,L2,…,L n分别为d、q坐标下定、转子的自、互感;J则为机组转动惯量。
2 虚拟同步机控制部分建模
VSG技术是指将传统同步电机机电暂态方程嵌入风电或光伏机组外送电力电子变换器控制策略中,使其模拟同步电机电磁、机械运动外特性[8]。
由于风电、光伏等新能源旋转备用容量小、与电网解耦运行等特点,过高的新能源占比会引起打捆外送系统送端的低惯量、低阻尼等问题,使得系统更易受故障或功率波动的影响,最终可能导致系统在大扰动下失稳。而将虚拟同步机控制策略引入打捆系统送端风电、光伏机组的并网换流器中可以有效改善送端系统的低惯量及欠阻尼问题。
为避免建模过于复杂同时兼顾实用性,本文以二阶同步电机模型为仿真建模目标。VSG 控制模拟的同步电机二阶转子运动方程可以表达为
式中:Tm和Te分别为原动机机械和电磁转矩;θ1为功角;ω和ωref分别为转子角速度和额定角速度;J为转子的转动惯量系数;D为转子的阻尼系数。
而定子电气方程可以表示为
式中:uabc为定子侧感应电动势;eabc为定子侧三相输出端电压;Ls、Cs分别为电枢电感和电容。
采用式(6)-(7)建模,建模过程相对简便,同时也能保证逆变器具备所模拟的同步电机的惯量特性。
VSG 的基本结构主要包括主电路和控制电路等部分,其中主电路部分主要包括并网换流器以及LC滤波电路等,如图3所示。

图3 VSG总体控制结构
VSG 控制算法主要在于功率外环控制部分中的有功功率-频率下垂控制环和无功功率-电压下垂控制环2个部分。VSG 有功功率-频率、无功功率-电压下垂方程表示为
式中:ω、ωn分别为电网同步角速度和模拟机械角速度;Kp、Kq分别为有功功率-频率下垂系数、无功功率-电压下垂系数;Pout、Qout分别为功率计算部分得出的电网实时有功功率、无功功率。
VSG 的核心计算部分是结合式(6)与式(8),通过功率给定值Pref、Qref与功率计算部分得出的传递功率Pout、Qout,经过控制环的内部计算得出虚拟内电势幅值E与相位角θ。VSG 的功率控制环结构见图4。
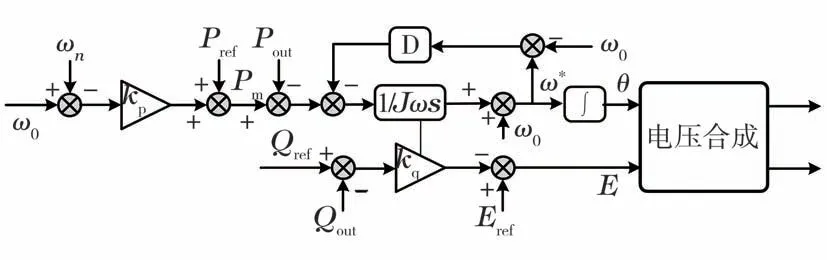
图4 VSG功率控制环结构
3 打捆系统暂态稳定性仿真分析
3.1 仿真系统
本文基于PSCAD 仿真平台搭建了风光火打捆外送系统的基础仿真模型,如图5所示。

图5 风光火打捆外送系统拓扑结构示意
风光火打捆系统送端由DFIG 模块、光伏发电模块、火电机组模块构成,三者连接到同一汇流母线1上后,经由交直流外送线路联接至两受端系统。风电机组的风速输入初始为11 m/s,输入光伏电池组的光照强度初始为1 000 W/m2,温度为25℃。汇流母线1基准电压为500 kV,双馈风电机组通过33 kV/0.4 kV/0.4 kV、33 kV/500 kV变压器汇入母线,光伏发电系统通过33 kV/0.4 kV、33 kV/500 kV变压器汇入母线。HVDC部分电压等级为±500 kV,输送线路长度为500 km。交流线路由电压等级500 kV的双回输电线路组成,线路长度为200 km。
3.2 仿真分析
为验证VSG控制算法与打捆系统送端风、光两机组结合后的可行性及有效性,以图5系统为基础仿真分析风、光机组有无VSG 控制策略的区别。设置三相故障发生仿真3 s时交流一回线路50%处,故障持续0.1 s后清除。VSG仿真参数见表1。
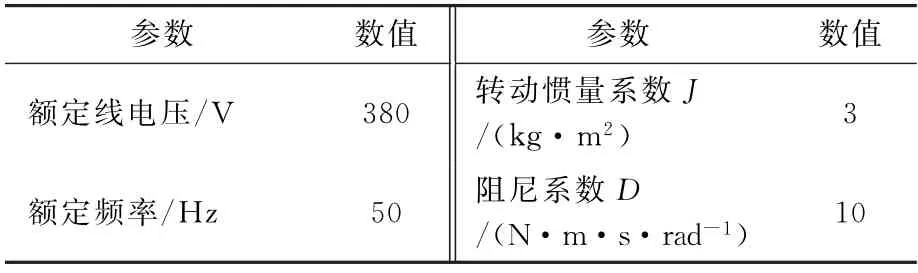
表1 VSG仿真参数
扰动发生后,可以看到图6中送端火电机组的功角摆幅有所减小,恢复速度也更快,VSG 控制策略有效改善了火电机组的功角响应。风电和光伏机组输出功率受扰后的首摆幅度、波动频率以及恢复速度都优于VSG 策略加入前,见图7-8。从各项仿真结果可以看到,送端系统风电与光伏机组并网换流器中加入VSG 控制策略后,风、光机组受扰后的各项输出响应均有所优化,系统送端表现出了更好的惯量特性。

图6 火电机组功角对比

图7 风电输出功率对比

图8 光伏输出功率对比
3.3 虚拟控制参数对系统暂态响应的影响
基于图5风光火打捆交直流混联外送系统典型模型,仿真分析转动惯量系数J和阻尼系数D的改变对打捆系统送端频率暂态特性的影响。当受端系统为非无穷大时,设置三相故障发生仿真3 s时交流一回线路50%处,持续0.2 s后故障消除。转动惯量系数J和阻尼系数D对母线频率的影响见图9、图10。由图9、10可以看出,当阻尼系数D恒定时,VSG 控制策略中转动惯量系数J的上升,会引起打捆系统送端母线频率动态响应中首摆幅度下降,而达到峰值的时间和调节时间均会有所增加;当转动惯量系数J恒定时,阻尼系数D上升会使得打捆系统送端母线频率动态响应中首摆幅度下降,调节时间也会降低,不同曲线对应的峰值时间也会略微下降。

图9 不同转动惯量系数J 对母线频率的影响

图10 不同阻尼系数D 对母线频率的影响
3.4 自适应参数控制对系统暂态响应的影响
为了使风光火打捆交直流混联外送系统送端结合VSG 策略后拥有更良好的动态响应性能,在风光火打捆系统新能源并网换流器的VSG 策略中引入了针对转动惯量系数J的自适应控制方式。当打捆系统送端受到扰动时,VSG 策略内部可以根据实时动态需求调整转动惯量系数J,从而使打捆系统送端获得更优的暂态稳定性和抗干扰能力。自适应参数J表达式为
式中:J0为转动惯量系数的初始值;k为调节系数;df/dt为送端母线频率的变化率;Z为调节阈值。设置阈值参数为了避免因频率小范围内波动造成惯量系数J值频繁变化最终导致系统失稳的情况。
上述自适应控制中,当|df/dt|<Z时,系统维持之前的运行状态,系数J不改变;当|df/dt|>Z时,通过实时调节惯量系数J改善打捆系统送端频率动态响应。对于系数Z和k,应综合考虑系统对于暂态响应超调和调节时间的要求灵活取值,本文为方便研究,取Z=2.5、k=1.5、J0=3。
基于图5典型模型,在D参数恒定的情况下,设置三相故障发生仿真3 s时交流一回线路50%处,持续0.2 s后故障消除。VSG 不同控制方式下母线频率响应如图11所示。

图11 VSG不同控制方式下母线频率响应
由图11可以看出,当风光火打捆系统受扰后,传统VSG 策略频率首摆最低至49.75 Hz左右,而结合系数J自适应控制后,打捆系统送端母线频率首摆最低值为49.89 Hz左右,明显优于前者。送端母线频率变化率超过阈值时,系数J自适应策略有效地降低了母线频率的超调量和调节时间。因此,基于系数J自适应控制的VSG 策略在风光火打捆系统送端母线频率变化的动态过程中有效地改善了频率动态响应,为打捆系统送端提供了更好的惯量支持。
4 结束语
对典型风光火打捆交直流混联外送系统的暂态稳定性的仿真分析和基于虚拟同步机策略解决打捆系统送端低惯量问题都具有重要意义。通过引入虚拟同步机控制策略,研究VSG 策略中转动惯量系数J和阻尼系数D对打捆系统送端母线频率暂态稳定性的影响,并在VSG 控制策略中引入系数J自适应控制策略,进一步改善了系统送端的惯量缺失问题,得到以下结论:
(1)当受端为非无穷大系统时,VSG 策略可以有效地提升系统送端暂态稳定性;
(2)当阻尼系数D恒定时,转动惯量系数J的上升,会引起打捆系统送端母线频率动态响应中首摆幅度下降,而峰值时间和调节时间均会有所增加;当转动惯量系数J恒定时,阻尼系数D上升会使得打捆系统送端母线频率动态响应中首摆幅度下降,调节时间也会降低,不同曲线对应的峰值时间也会略微下降;
(3)采用系数J自适应的VSG 控制策略可有效地减小风光火打捆系统送端母线频率的暂态波动幅度,有效改善送端母线频率的动态响应。
