一种新型变曲率柔性关节微创手术机械手设计
2022-02-23董佳祥李伟光王春宝刘铨权
董佳祥,李伟光,王春宝,刘铨权
(1.华南理工大学机械与汽车工程学院,广东 广州 510641;2.深圳大学第一附属医院,广东 深圳 518035;3.深圳市老年医学研究所,广东 深圳 518020)
1 引言
微创手术机器人最大的优点是其在微创手术中可以实现对微创手术器械的精准控制,手术器械的自由度和灵活度也比传统人工操作的手术器械高得多,从而达到比传统的微创手术更好的效果[1]。其正在成为一种新型外科手术方法,开创了一种实施外科手术新理念。但微创手术机器人仍存在很大的局限性,在狭小工作空间下,微创手术机械手灵活度不足导致无法灵活操作病变组织。
为了应对这些挑战,许多研究人员均致力提高机械手灵活性的研究,期待为患者和医生提供更加优质服务。著名商业化手术机器人系统Da Vinci,其机械手具有7自由度,且可滤过术者手术颤动,增加手术操作的精准度和灵活性[2]。然而,手术器械因前端关节弯曲曲率固定,手术操作过程需要体外定位机械臂协调工作,完成手术器械前端位姿调整。
文献[3]提出了一种基于柔性关节的单孔手术机器人,它由多节远端结构、多节近端结构和一组刚性引导套管组成,每一节通过脊骨的推拉驱动实现三个自由度,然而,由于需要较大工作空间展开其可弯曲关节,限制了它在狭窄工作空间的应用。文献[4]提出一种使用材料变形实现四自由度紧凑型的医用镊子机构,该机构由两种类型的弹性元件组成,一种是具有大切口圆柱形状弯曲体,实现旋转功能。另一种是由主、母两钳体串联组成,实现开合功能。这种设计可以使医用镊子结构紧凑,但弯曲运动和医用镊子的开合运动相互耦合,增加了控制复杂性。在机器人装配过程中,采用机器人关节电机内置的解决方案,从而缩短了动力传递路径,提高了关节承载性能[5]。本研究团队前期开发出一种儿科手术协助机器人,具有两个万向弯曲段的外科手术机械手,单个弯曲段由三个平行连杆所组成,通过调节弯曲连杆的支撑长度,实现了在任意方向上达到(±45)°的工作范围,虽然弯曲连杆的串联连接增加了操作灵活度,但仍存在弯曲角度和段长的问题[6]。
这里提出一种基于变曲率柔性关节的新型微创手术机械手,以适应狭窄工作空间。所提出的外科手术机械手可以根据需求调整柔性关节的曲率,更好为医生与患者服务。这里架构包括:第一部分引言介绍;第二部分展示结构设计;第三部分介绍运动控制模型构建;第四部分进行实验验证;最后,总结当前阶段设计。
2 结构设计
2.1 微创手术机器人系统总成
本研究微创手术机器人主要由体外定位机械臂和微创手术机械手构成,其系统示意图,如图1所示。体外定位机械臂用于辅助微创手术机械手进行精准定位,微创手术机械手完成狭小工作空间的精细治疗。同时内视镜捕捉微创手术机械手进行病变组织治疗的实际状况,给医生操作端提供内视镜图像,辅助医生进行手术操作。
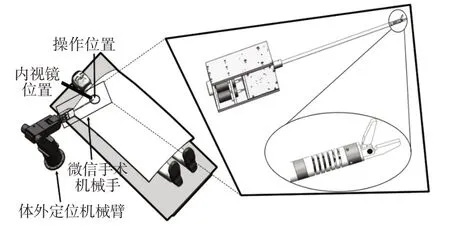
图1 微创手术机器人系统示意图Fig.1 Minimally Invasive Surgery Robot System Schematic
2.2 变曲率柔性关节实现机理
通常,微创手术机械手可以使用连续体等部件构造柔性关节。一般做法是在几个圆盘上采用多个弹性杆件圆周分布,圆盘在弧度方向上受到弹性杆件的推拉驱动;另一种,通过逐个堆叠圆盘,使用弹性杆将圆盘圆周方向分布的孔串联连接。对于逐个堆叠圆盘的柔性机械手而言,其通过圆周方向上弹性杆的驱动控制弯曲角度和末端执行器的方向。然而,相邻圆盘的内通道的轴线不能总是彼此重合,从而会造成圆盘的外表面嵌入相邻圆盘的内通道当中,导致无法准确插入刚性基杆来控制柔性机械手的弯曲曲率。
这里搭建变曲率柔性关节的新方法是采用弹性元件和刚性基杆,同时保留弹性元件内部中空通道,形成刚柔体同轴嵌联结构,实现微创手术机械手的变曲率机理。通过圆周方向均布的四根钢丝绳(两对)的推拉运动完成末端执行器的万向弯曲;将装饰有钢丝绳线槽的刚性基杆插入到中空通道中,通过刚柔体同轴嵌联结构控制柔性关节中机加工弹簧和刚性基杆的耦合长度,实现微创手术机械手的变曲率柔性关节,不同耦合长度情况,如图2所示。当夹持器末端姿态相同时,随着耦合长度的增加,弹性元件弯曲段长度减小,曲率半径R>r,从而增加在狭小工作空间下,微创手术机械手的灵活度。
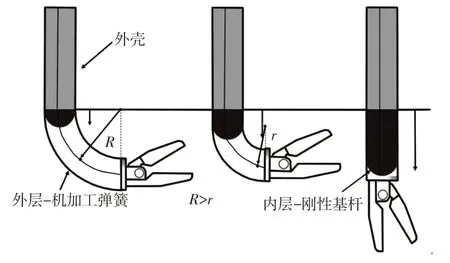
图2 变曲率柔性弯曲关节实现方法Fig.2 Method for Realizing Variable Curvature Flexible Bending Joint
2.3 机械结构
变曲率柔性关节新型微创手术机械手由末端执行器和驱动单元组成。末端执行器由2自由度柔性关节和1自由度开合夹持器组成;驱动单元由动力传递装置和快速更换装置组成。以婴幼儿腹腔为对象进行需求分析,查阅相关文献[6],制定本研究微创手术机械手主要技术要求为:
(1)末端执行器能够在(30×30×30)mm的空间内进行手术操作;
(2)柔性关节所采用的圆柱体元件直径控制在10mm以内;
(3)末端执行器前端提供不小于2N夹持力;
(4)柔性关节最大弯曲角度(±60)°,运动精度不低于(±0.5)°;
(5)实现可变曲率连续、万向弯曲;且刚度、强度满足要求;
(6)应用于狭窄空间夹持手术器械,完成手术操作。
根据技术要求,选择弹性元件为Helical Products Co.Inc生产的机加工弹簧(外径7.5mm,内径5.5mm,材料SUS304),用于设计高性能、狭窄空间工作的变曲率柔性关节。机加工弹簧圆周方向均布有四个孔(两对),相对两孔圆心距离为6mm。通过钢丝绳(材料SUS316,破断拉力68.6N)的推拉驱动实现柔性关节的万向弯曲。
由于,刚性基杆和机加工弹簧的中空通道相配合,则刚性基杆和机加工弹簧的耦合段可作为刚体处理,机加工弹簧的其余部分将通过钢丝绳驱动弯曲。末端执行器的详细机械结构,如图3所示。钢丝绳直径为0.3mm,弹性脊柱直径为0.9mm。弹性脊柱沿机加工弹簧的轴线方向固定,防止钢丝绳拉动时机加工弹簧的轴向压缩。
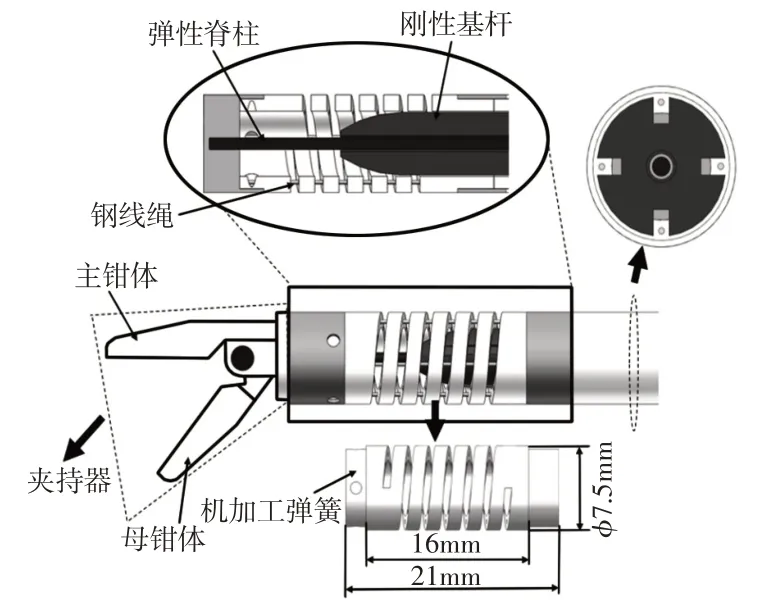
图3 末端执行器—机械结构示意图Fig.3 End Effector-Mechanical Structure Schematic
本研究驱动单元由动力传递装置和快速更换装置组成。动力传递装置用于实现电机到末端执行器的动力传递,采取蜗轮副机构、齿轮齿条副机构完成此过程的动力传递。柔性关节弯曲运动的动力由蜗轮副机构传递,刚性基杆平移运动的动力则由齿轮齿条副机构传递。快速更换装置,实现体外定位机械臂与微创手术机械手快速连接,提高微创手术效率。三个导向块安装在壳体单元的上下两面,连接盒的上下两面有与之匹配的导向槽,且上下两面导向槽彼此设计不同,使得微创手术机械手能够沿着独特的方向安装到壳体单元中,驱动单元系统示意图,如图4所示。
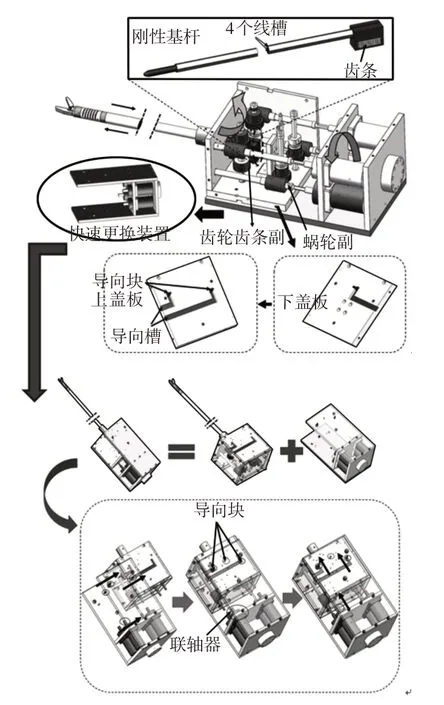
图4 驱动单元系统示意图Fig.4 Drive Unit System Schematic
2.4 夹持器受力仿真分析
作为微创手术机械手重要机构—夹持器,其直接接触手术器械进行相应操作。由于钢丝绳破断拉力68.6N,夹持器两端钢丝绳的圆孔中心距6mm,钢丝绳最大转矩T为205.8N/mm,本次仿真夹持器主、母钳体内表面夹角设置为20°,母钳体末端最远点与主、母钳体连接轴中心垂直距离为4.1mm,则理论最大可提供47N的夹持力。考虑技术要求中提供不小于2N夹持力,以及钢丝绳与穿绳孔的摩擦力、安全系数等因素,仿真分析时最大夹持力定为10N。本次仿真采用一个10N的圆柱形物体作为被夹持器物,夹持器水平放置,主、母钳体间夹角为20°,则母钳体内表面法线方向施加9.3969N力,由于主钳体和夹持器底座固连,则主钳体沿Y轴方向受到10N力。夹持器装配体材料采用结构钢,整个仿真过程设置5个载荷步,主钳体沿Y轴方向依次施加3N、6N、9N、10N、10N等五个力,母钳体内表面法线方向依次施加2.5N、5N、7.5N、9.3969N、9.3969N等五个力,从而保证力均匀施加在被作用体上,且最后一个载荷步分别锁住10N、9.3969N力,观察持续施加力结果。同时,调整夹持器主、母钳体内表面摩擦系数,得到被加持物脱离钳体的最小摩擦系数,本次仿真得到最小摩擦系数μ=0.35。
夹持器装配体仿真结果示意图,如图5所示。母钳体的变形相对于主钳体的变形较大,且越靠近夹持器末端,变形越大,如图5(a)所示。整个夹持器的受力示意图,如图5(b)所示。主钳体的最大变形量为0.0250mm,母钳体的最大变形量为0.0322mm,如图5(c-d)所示。主、母钳体连接区域,以及主钳体外表面的穿线孔处的应力、应变较大,如图5(e)~图5(f)所示。通过本次仿真,当主、母钳体内表面夹角为20°时,钢丝绳提供的最大支持力为10N,主、母钳体内表面摩擦系数为最小摩擦系数时,设计的夹持器可实现最大0.0322mm的变形量。后期考虑主、母钳体连接的轴采用与其不同的材料,及合理布置主钳体外表面穿线孔位置,降低此区域应力、应变,增强夹持器整体刚度。
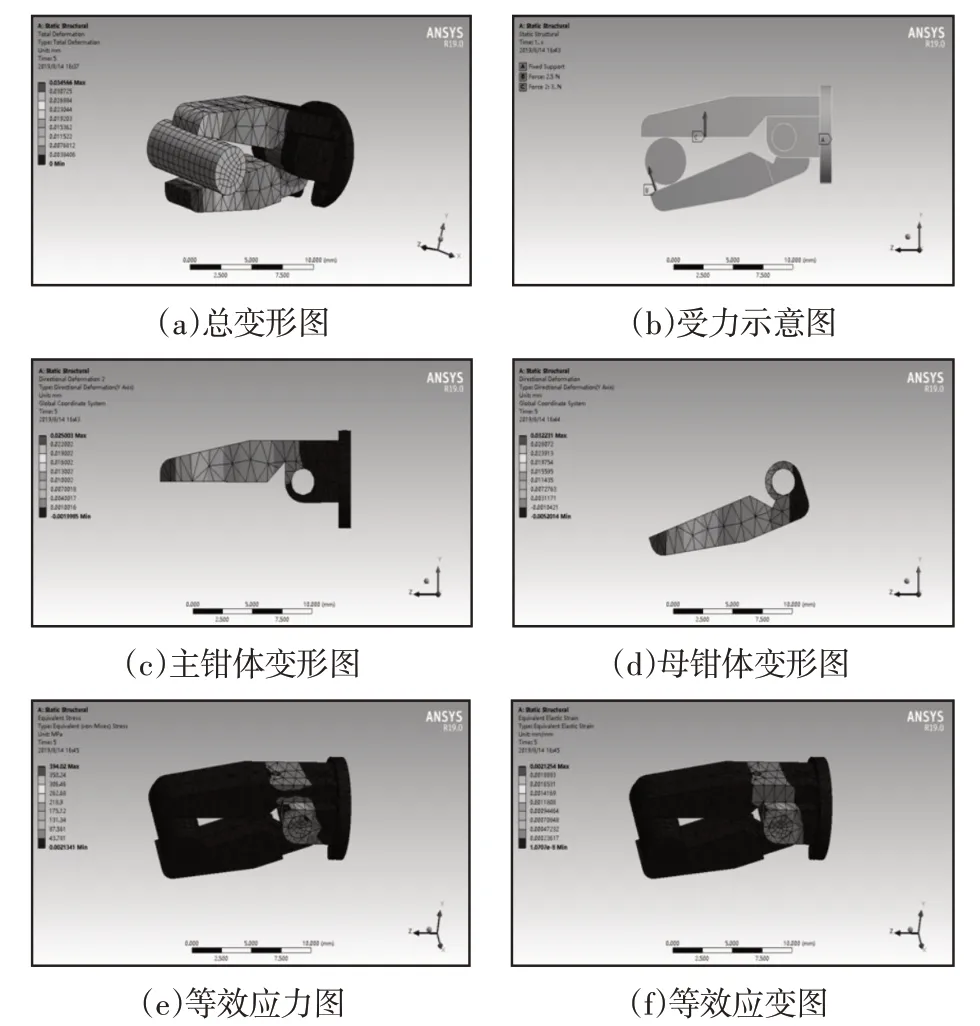
图5 夹持器仿真结果Fig.5 Gripper Simulation Results
3 运动控制模型构建
由于机械部件的柔性对从手臂的运动精确性影响较大,直接影响到从手臂末端执行器的定位精度[7]。则构建正确运动控制模型对于微创手术机械手的精确操控至关重要。本次设计的柔性关节由圆周方向均布的4根钢丝绳驱动,柔性关节远端相对基面的位姿调整可用坐标系变换描述,如图6所示。
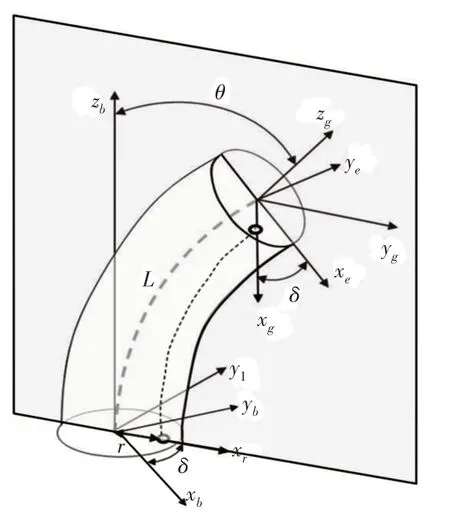
图6 柔性关节坐标系Fig.6 Flexible Joint Coordinate System
图中:柔性关节可实现绕x、y轴弯曲运动,(xb,yb,zb)—柔性关节的基坐标系(世界坐标系);(x1,y1,z1)—弯曲平面坐标系;(xe,ye,ze)和(xg,yg,zg)—末端执行器远端坐标系和夹持器工作坐标系;θ—绕y轴旋转角度;δ—绕z轴旋转角度。因此,通过式(1)计算末端执行器远端位置投影:

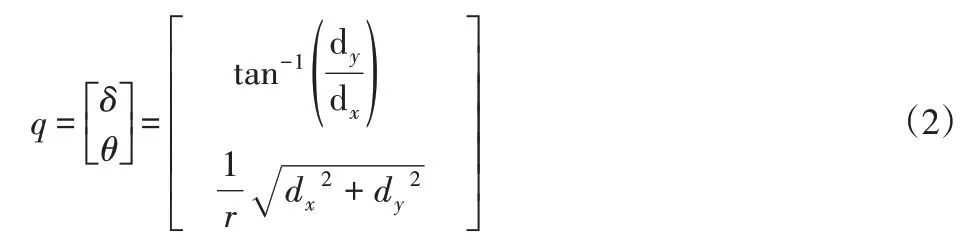
式中:dx、dy—末端执行器远端钢丝绳位置点在其坐标系下的投影。由于dx、dy可以测量得到,则利用上式反解可得末端执行器的姿态角:
当末端执行器远端加上夹持器后,再将夹持器尖端位置转化到柔性关节的基坐标系(xb,yb,zb)中,得出位置结果如下:
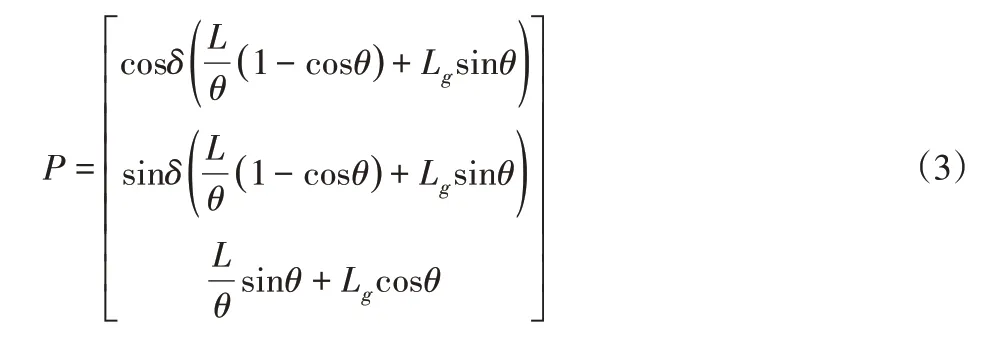
式中:L—柔性关节长度;Lg—夹持器长度。
当机加工弹簧和刚性基杆的耦合深度为s时,则夹持器尖端位置为:

通过构建运动控制模型,可知:当已知钢丝绳驱动量时,则可求出末端执行器远端姿态角,进而求出钢丝绳在末端执行器远端的具体位置;当知道末端执行器远端位置或姿态角时,也可求出钢丝绳的驱动量。夹持器的底座与末端执行器的远端相连,柔性关节相关参数,如表1所示。采用MATLAB软件进行工作空间仿真,描述耦合长度s=0时,夹持器尖端位置的工作空间,如图7(a)~图7(c)所示。由仿真结果可知:此柔性关节确保夹持器尖端可实现万向弯曲运动。δ=0时,耦合长度s=0mm、5mm、10mm、16mm等四种情况,如图7(d)所示。通过对耦合长度分析可知:机加工弹簧弯曲段的长度取决于其与刚性基杆的耦合长度,随着耦合长度s的增加,柔性关节的曲率将逐渐增加。整个柔性关节在s=0时,视为可弯曲关节;在s=16mm时,视为刚体,即柔性关节与刚性基杆完全耦合。

表1 柔性关节参数Tab.1 Flexible Joint Parameters
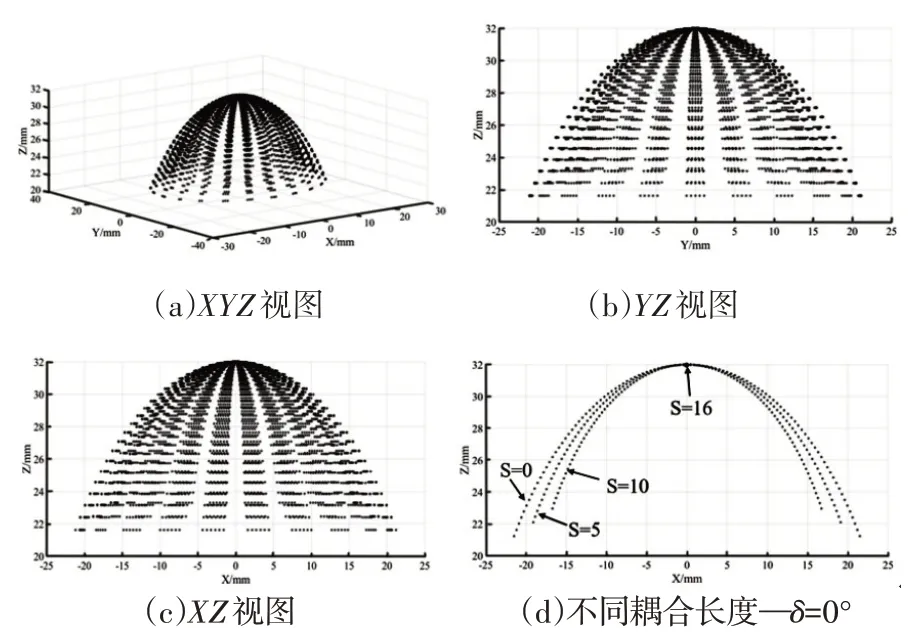
图7 工作空间仿真示意图Fig.7 Work Space Simulation Schematic
4 实验验证
伺服电机控制的最小实现单元为单电机控制,增加伺服电机数量并对各参数进行关联控制,既可以实现多电机控制[8]。同时,考虑到微创手术机械手的紧凑设计,本设计采用四个谐波伺服电机(RSF-100-E050-C,减速比:100)完成动力输入。整个微创手术机械手的装配后,进行微创手术机械手的弯曲运动实验。
搭建硬件系统,如图8(a)所示。通过上位机发送指令提供钢丝绳的驱动量,进而完成弯曲运动实验。柔性关节初始状态,如图8(b)所示。柔性关节绕单轴—Y轴弯曲的状态,如图8(c)、图8(d)所示。实现了预设柔性关节参数θ为(-60~60)°;柔性关节同时绕Y、Z轴的复合弯曲运动状态,如图8(e)所示。耦合长度比例为40%时,柔性关节的弯曲状态,如图8(f)所示。耦合长度比例为70%时,柔性关节的弯曲状态,如图8(g)所示。通过不同的耦合长度实验,可知:当夹持器末端位置姿态相同时,随着耦合长度的增加,机加工弹簧弯曲段的长度减小,曲率半径R>r,其曲率逐渐增大,从而增加弯曲灵活度;上位机向末端执行器三次发送弯曲30°指令后,实际的弯曲结果,如图8(h)所示。通过对实验数据进行处理,得到的实际弯曲结果分别为30.3°、29.8°、30.2°,上位机指令为60°,实际测量值为60.4°、59.7°、60.1°,实验验证满足弯曲运动精度。本次弯曲运动实验微创手术机械手实现了弯曲运动,且实验结束后,弹性元件能快速恢复到原始状态。此设计方案为柔性关节的灵活性提供了保证。

图8 弯曲运动实验Fig.8 Bending Function Test Result
5 结论
(1)完成基于刚柔耦合的可变曲率柔性微创手术机械手创新机构设计。通过刚柔体同轴嵌联结构,控制内置刚性基杆和柔性弹簧耦合的长度,实现柔性执行器前端刚度和弯曲曲率的术中连续可调,满足手术对象的工作空间要求。(2)对夹持器进行受力仿真分析,得到在主、母钳体内表面最小摩擦系数下,夹持力最大变形量为0.0322mm;同时,得到应力、应变集中区域,为后续夹持器的优化提供支撑。(3)构建可变曲率柔性关节微创手术机械手前端位姿精确控制模型。(4)实验验证了微创手术机械手的变曲率万向弯曲运动,其弯曲运动精度保证在±0.5°范围内,满足设计要求。
