磨抛机器人末端柔性并联结构设计与研究
2022-02-23郭彦青林炳乾
刘 璐,郭彦青,林炳乾,马 静
(中北大学机械工程学院,山西 太原 030051)
1 引言
粉煤光片磨抛质量的好坏直接决定了煤岩学观察研究的结果,不合格的粉煤光片在极端情况下会造成错误分析结果,不利于对煤炭的开发和综合利用,甚至可能造成巨大的资源和资金浪费。粉煤光片通常为圆柱形,用较小的煤颗粒与黏结剂混合而成,通常采用半自动设备结合人工进行磨抛,效率低,质量差。为此,研制一款仿生柔性磨抛设备就显得尤为重要[1~2]。
文献[3]利用附加弹簧双滑块四杆机构设计了一种可以恒力夹持的柔顺机构;文献[4]设计了弹簧并联柔顺结构并对弹簧参数进行了计算说明;文献[5]以柔性砂带为基础设计了有一定灵活性的曲面工件磨削系统;文献[6]用低摩擦气缸作为柔顺元件设计了可检测设备位移的传感器;文献[7]针对研磨问题设计了一种浮动平台机器人系统,具有较好的抗干扰能力;文献[8]开发了一种机器人末端打磨执行器,解决了轨道交通车辆车体人工打磨方式存在诸多弊端;文献[9]设计了一种可进行表面加工的三自由度并联机构,研究了其工作空间分布特点,并利用ADAMS对机构的运动过程进行了运动仿真分析。目前对粉煤光片磨抛设备的研究相对较少,且存在问题较多,因此对粉煤光片高效高质磨抛的研究必然会对未来煤炭的开发和利用产生积极的作用,同时采用并联结构设计柔性末端执行器在磨抛领域具有一定的潜力,可为其他相关方面的研究提供参考。
2 结构设计
粉煤光片磨抛时,磨抛盘由于人为安装和加工误差常常存在一定倾角,使粉煤光片端面不能垂直磨抛盘,磨抛出的端面不符合检测要求,废品率较高,且在磨抛过程中部分粉煤光片需要进行倒边操作。基于此,根据国标GB/T16773—2008《煤岩分析样品制备方法》中的工艺要求,对林炳乾,文献[10]设计的结构进行改进,在动平台上安装三爪式气缸,完成自动抓取粉煤光片动作,如图1所示。
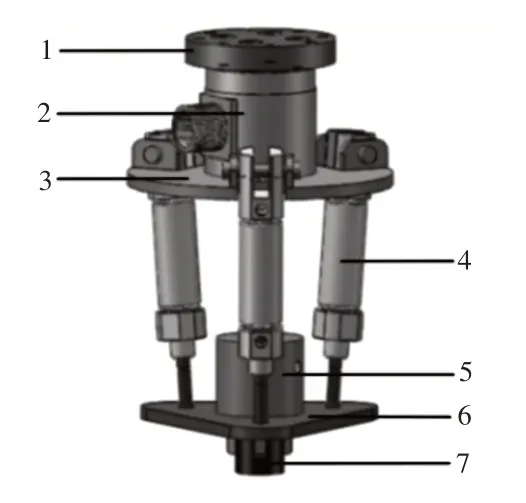
图1 末端执行器结构图Fig.1 Structure Diagram of End Effector
3 ADAMS运动仿真分析
对于并联末端执行器结构来说,活动平台不可能通过自身旋转到达空间360°的某一位置,因此对并联结构进行粉煤光片磨抛动作仿真时,加入一个6自由度串联机械手,用以辅助完成粉煤光片磨抛的圆周动作。
3.1 磨抛盘倾斜状态下的运动仿真
在ADAMS软件中将结构模型和六自由度机械手模型按照实际运动方式进行装配,得到粉煤光片磨抛机器人整体装配图,如图2所示。

图2 ADAMS中装配仿真图Fig.2 Assembly Simulation Diagram in ADAMS
对末端执行器与机械手相连的法兰中心设置运动副驱动,转动角速度为30°/s;在3个活塞杆质心处设置大小为10N的沿杆作用力,使活塞杆驱动活动平台完成对倾斜磨抛盘的主动跟随;对动平台上的粉煤光片端面中心点设置驱动,使该点在磨抛盘表面做角速度为30°/s的周转运动。为方便观察设置24s,2000step的运动学仿真,即仿真两个磨抛周期的运动。
选取串联机械手底座中心处的水平面为大地平面,以此面为基准,向上运动为正向运动。气缸活塞杆末端连接中心为测量点,此点在空间中的运动即可反应活塞杆的运动情况,也就反应了活动台的位姿变化情况。气缸活塞杆的运动情况,如图3~图5所示。由图3所示曲线可知,在0时刻,通过3个气缸的活塞杆位移曲线可以看出,活塞杆1和2的位移较大,且在同一位置,活塞杆3的位移较小,这与图2所示的初始位姿相吻合。在6s时,运动到半个周期,由于磨抛盘的倾斜状态和自转运动,粉煤光片运动到磨抛盘的最低位置,活动平台也恰好绕中心转过180°,活塞杆3的位移由最小变化到最大;从(6~12)s时,粉煤光片从磨抛盘的最低位置向最高位置运动,活塞杆3的位移逐渐减小,在12s时运动到初始位置,完成一个周期运动。同理,活塞杆1和2的位移变化也符合运动规律。在图5所示的加速度曲线中,在运动开始的瞬时,加速度发生微小突变,但图4中的速度曲线没有突变,因此会产生较小的柔性冲击,柔性冲击运动适用于中低速场合,符合对粉煤光片研磨的低速作业场景,能够保证在倾斜磨抛盘上稳定可靠的研磨运动。
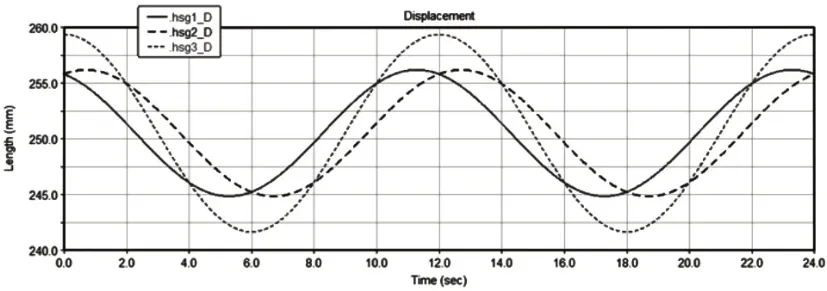
图3 活塞杆位移变化图Fig.3 Piston Rod Displacement Changes

图4 活塞杆速度变化图Fig.4 Piston Rod Speed Changes

图5 活塞杆加速度变化图Fig.5 Piston Rod Acceleration Changes
3.2 仿腕部倒边磨抛运动仿真
在该工况下,磨抛盘水平安装,动平台水平面与磨抛盘水平面初始位置夹角为30°,其余参数同上一小节。在ADAMS软件中装配初始状态,如图6所示。
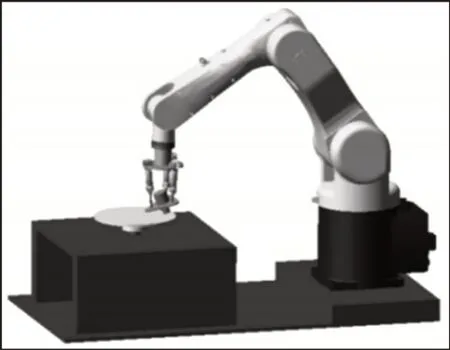
图6 ADAMS中仿手腕动作装配图Fig.6 Assembly Diagram of the Imitation Wrist Movement in ADAMS
对末端执行器与机械手相连的法兰中心设置转动角速度为30°/s,定平台的中心点绕磨抛盘轴线角速度为30°/s,在粉煤光片被磨抛面中心点添加点驱动函数:
TraZdisp(time)=0×time,
RotXdisp(time)=30d×sin(time),
RotYdisp(time)=30d×sin(time)。
设置24s,2000step的运动学仿真,即仿真两个周期的仿腕部磨抛动作。磨抛盘安装台平面为大地平面,以此面为基准,向下运动为正向运动。气缸活塞杆的运动情况,如图7~图9所示。

图7 活塞杆位移变化图Fig.7 Piston Rod Displacement Changes
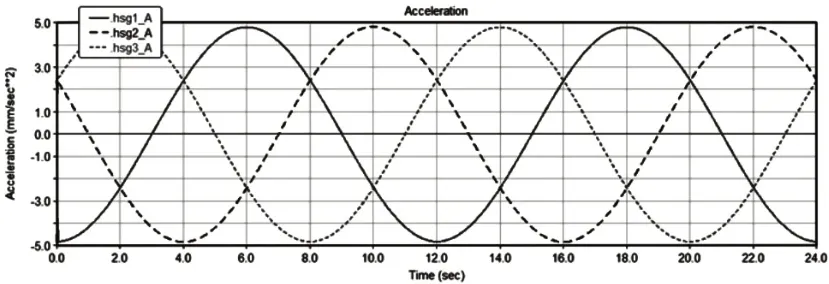
图9 活塞杆加速度变化图Fig.9 Piston Rod Acceleration Changes
根据设置的相关参数可知,粉煤光片将随活动平台在磨抛盘表面做2圈周转运动和2圈自转运动。由图7所示,气缸活塞杆行程的位移规律在2个运动周期内,均为正弦运动曲线,位移变化平稳,在运动开始阶段,通过3个气缸的活塞杆位移可以看出,活塞杆1处在最大位移处,活塞杆2和3均处在最小位移处,符合图6所设置的初始状态。在图9的加速度曲线中,在运动开始的瞬时,同样发生了微小突变,由图8的速度曲线分析可知,3个活塞杆速度变化趋势平稳,所产生的柔性冲击并不影响整体运动,能够满足柔性腕部动作需求。
综上,该并联结构能够很好地解决目前刚性磨抛存在的问题,具有较好的柔性和适应性,运行流畅稳定。
4 磨抛实验及结果分析
搭建磨抛实验平台,对粉煤光片进行磨抛实验,如图10所示。结合国标中对粉煤光片磨抛动作的要求及上一节的动作仿真可知,需对不同工况下的磨抛项目进行实验验证,并设定具体实验项目和相关参数,如表1所示。

图10 磨抛实验平台Fig.10 Grinding and Polishing Experiment Platform
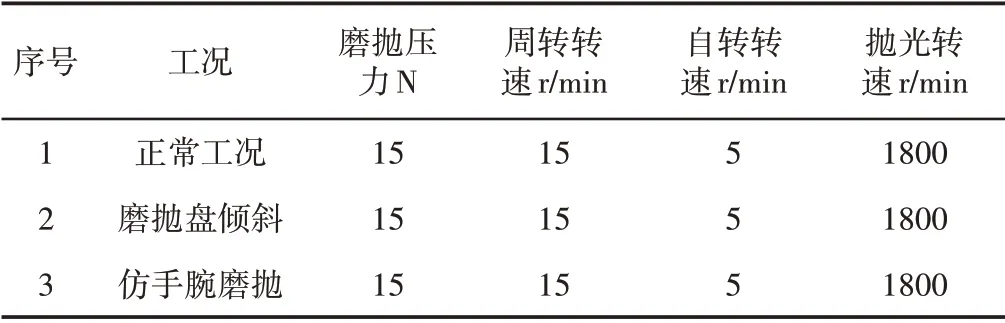
表1 实验项目及参数Tab.1 Experimental Items and Parameters
根据表中相关参数对设备进行设置,按照表中所列实验项目依次进行粉煤光片磨抛实验,粉煤光片为直径30mm高15mm的圆柱形,对2种工况下的粉煤光片磨抛结果对比,如图11所示。
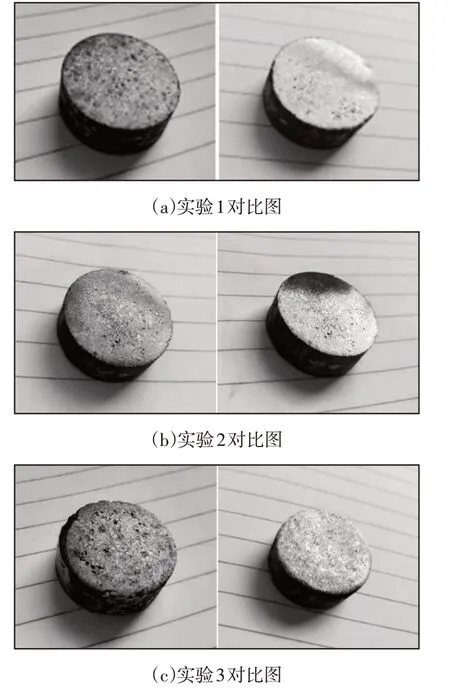
图11 磨抛实验前后对比图Fig.11 Comparison Chart Before and After the Grinding and Polishing Experiment
由图11所示的磨抛结果可以看出,不同工况下的粉煤光片磨抛效果均较好,没有肉眼可见的瑕疵,磨抛质量较高。将上述各实验中磨抛后的粉煤光片使用电子显微镜放大(20~50)倍进行煤相的煤岩学观察分析,如图12所示。
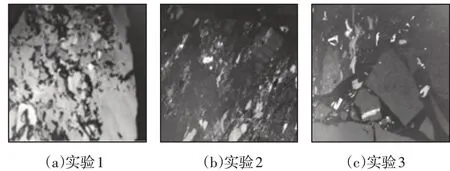
图12 粉煤光片显微检测放大图Fig.12 Enlarged Photomicrograph of Pulverized Coal Light Sheet
通过对各实验项目粉煤光片显微图像的检测分析可以看出,在以上不同工况下,经过柔性并联末端执行器磨抛后的粉煤光片表面平整,无明显突起、凹痕,煤颗粒表面显微组分界线清晰、无明显划道且表面清洁,无污点,具有较高的磨抛质量,完全满足粉煤光片检测的标准。
对于粉煤光片的磨抛,在采用传统的手工研磨和抛光时,每个光片的磨抛时间需要(30~40)min,费时费力,不仅极不方便,且难以保证粉煤光片的磨抛质量[11]。利用所设计的柔性末端执行器对粉煤光片进行磨抛加工,根据表1所列磨抛参数可知,每个磨抛工序的环节只需用时3.3min左右,整个磨抛流程需用时13.2min,在保证对粉煤光片磨抛质量的前提下,磨抛速度较手工磨抛平均提高了2.65倍。
5 结论
(1)针对粉煤光片磨抛过程中存在的问题,提出了一种柔性并联末端执行器结构。
(2)在ADAMS中对两种常见工况进行了运动仿真分析,仿真结果表明:该结构运行稳定可靠,对不同工况均具有良好的柔性和适应性。
(3)搭建实验平台,并对三种常见工况进行磨抛实验。磨抛后的粉煤光片经检测后均为合格品,磨抛质量和效率较人工操作显著提高,磨抛速度较手工磨抛的速度平均提高了2.65倍,验证了结构设计和仿真分析的可行性,具有实际使用价值,也为其他自动磨抛设备的研制提供参考。
