高空作业车底盘自主调平系统性能仿真
2022-02-23纪爱敏
刘 志,纪爱敏,张 磊,王 豪
(河海大学机电学院,江苏 常州 213022)
1 引言
近年来,随着我国基础建设的大力发展以及国外产品的大量涌入,高空作业平台的种类也愈发齐全,主要的结构型式分为伸缩式、折叠式以及垂直式。因此,随着平台作业高度的不断上升,针对高空作业平台的安全稳定性,底盘调平技术也从原来的手工操作调平发展至通过计算机实现调平[1]。
为保证高空作业平台在工况下的稳定性,需要对平台底盘进行必要的仿真分析以保证作业安全可靠。由于调平技术的不断发展,意大利的Oil&Steel公司采用底盘四支腿支撑技术,平台的四支腿都具有各自独立的驱动装置,该装置可以适应环境,使支腿左右摆动或屈伸,因此其平台可以在凹凸不平地面及楼梯进行作业[2]。国内学者也在不断的研究,游雷等人借助AMESim以及Simulink进行联合仿真对高空作业平台底盘调平系统调平精度进行了进一步的研究[3]。文献[4]采用模糊PID控制对高空作业车篮体调平系统的响应速度进一步优化。目前工程上,高空作业车液压支撑结构一般应用于相对平坦的地面,底盘的调平精度主要取决于地面的平坦度。然而,这种方法的调平精度往往达不到工况要求。这里综合考虑负载以及工况的不确定性,采用4点调平法中的“追逐式调平”。根据高空作业车性能要求,建立相应的液压系统,计算泵的排量以及相应的液压缸的缸径和杆径。借助工程仿真软件AMESim建立相应的液控模型,模拟在复杂工况下,底盘四支腿的自主调平,并对液压系统的流量、压力以及位移特性曲线进行分析,实现底盘调平系统的快速响应以及高精度调平。
2 底盘自主调平系统
2.1 调平原理介绍
当工作地面复杂时,各支腿所处高度不同,对于四支腿调平而言,采用4点调平法中的多点调平,又称为“追逐式调平”。即保持最高点不动,3点同时伸出,抬起底盘向上运动,最终使得底盘处于水平状态。
这里采用最高点不动“追逐式”调平法,在四支腿完全接触地面之后,采用双轴水平传感器检测底盘的X轴与Y轴的倾斜度,再通过压力传感器检测出四调平支腿的最高支腿,保持不动,逐次伸长其他三支腿,直到各支腿调平精度在水平传感器的许可范围内,结束调平“。追逐式“调平法的调平速度快,算法复杂一般适用于工作运行较为平稳的设备[8]。调平过程,如图1所示。
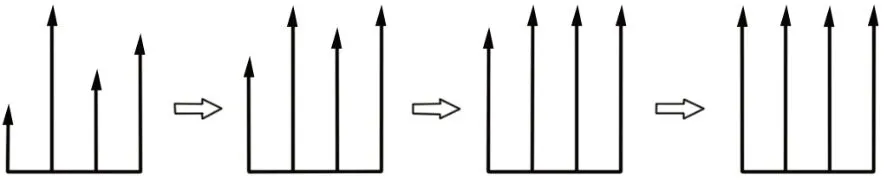
图1 最高点“追逐式”调平过程Fig.1 The Highest Poin“tChasing”Leveling Process
2.2 调平流程以及调平机构
高空作业车在开始作业时,为实现底盘调平,分为三个阶段。第一阶段是高空作业平台到达指定工作地点后,四调平支腿同步伸出,在第一个支腿接触到地面之后,为克服地面松软以及地面不平的情况,在进油路上设置压力传感器,通过压力传感器的数值判断,检测是否解决伸缩油缸的虚腿问题。其余三支腿依次接触地面,重复上述。第二阶段是在各支腿均完全接触地面后,将底盘各点之间的位移差,通过一定的传递函数,转换为控制信号,输出给控制各支腿的电磁换向阀,以此缩短给支腿之间的位移差,实现底盘在复杂地面上保持水平。第三阶段是,当高空作业平台底盘处于水平状态后,四支腿同时动作,将整机抬起一定高度,使得轮胎离地[7]。底盘多状态坐标关系图,如图2所示。

图2 多状态坐标关系图Fig.2 Multi-State Coordinate Relationship Diagram
调平系统主要由检测装置、控制装置以及调平执行机构组成。检测装置主要由压力传感器和双轴水平传感器组成,压力传感器检测进油口压力数值,双轴水平传感器检测X轴与Y轴的倾角。根据底盘的尺寸,计算得出各轮胎对应的高度位移差,即所需调平的位移差。但是,由于工况的不确定性,各轮胎的所处的平面与相应支腿所处的平面是不同的,这里为了简便计算,直接给出轮胎的位移差。在完成调平后,水平传感器检测调平精度是否符合工作要求。控制装置主要由AMESim信号库控制构成,用于控制各阀口开度的大小,高空作业平台工作的稳定性主要取决于底盘的调平精度,因此在调平系统的末端设有增益,用于提高调平精度。调平执行机构由四组双向液压锁以及阀控单杆活塞缸组成,在进油路和回油路均设有一定的压力缓冲,保证流量平稳运行[8]。调平系统原理图,如图3所示。

图3 调平系统原理图Fig.3 Schematic Diagram of the Leveling System
3 底盘液压支撑结构
高空作业平台的底盘结构,主要是由主机部分以及动力部分组成。主机部分包括底盘以及四支腿,动力部分包括液压站以及四个伸缩油缸[5]。底盘结构简图,如图4所示。

图4 底盘结构简图Fig.4 Chassis Structure Diagram
高空作业平台在作业时,首先将底盘四支腿快速伸出,在四支腿先后接触至工作地面后,通过缩短支腿间的位移差,使得底盘调平,底盘水平后,四支腿同时伸出,支撑整机脱离地面,以提高平台抗干扰能力。液压系统通过调节支腿的伸出量来保证平台在不同的工况下,实现底盘在凹凸不平地面上,保持水平状态,确保作业安全可靠,延长底盘的使用寿命以及作业范围[6]。四支腿液压系统原理图,如图5所示。

图5 四支腿液压系统原理图Fig.5 Schematic Diagram of the Four-Leg Hydraulic System
液压系统中,首先压力油从油箱流出经过过滤器进入齿轮泵,由电动机驱动齿轮泵为液压系统提供动力,在进入单向阀之前设有节流阀,保证压力油流速不宜过大。在压力油进入单向阀后,此时电磁换向阀Y1右位接通,液压油同时为四个支腿回路供油,同时分别接通电磁换向阀Y2、Y3、Y4、Y5右位,液压油需克服一定的压力,进入由两个液控单向阀并联而成的液压锁。在压力油进入无杆腔之前,设有压力传感器,用于检测进油口压力值,将检测值输入给控制系统,用于控制各支腿阀口的开度大小,进而油液流入四支腿的无杆腔,驱动液压杆伸出,抬起平台,实现底盘的调平以及起升[5]。
4 AMESim仿真
AMESim是一款优秀的复杂系统建模仿真软件,它能够研究系统或元件的稳态或动态性能。AMESim面向工程应用提供了液压元件设计库、液压库、信号控制库、机械库等多种应用库,它能够快速的搭建各种系统的模型,使得研究人员能够从复杂的数学方程中解放出来而仅需关注物理系统的本身。这里主要利用AMESim,从液压库、机械库以及信号库中调用各个元器件,来搭建底盘自主调平系统模型。从而,更加真实的模拟由于地面的凹凸不平,带来的液压系统压力和流量的变化趋势,并分析调平液压系统稳定性和响应时间等动态特性。
4.1 支腿液压系统建模
根据四支腿液压系统原理图,借助工程系统仿真软件AMESim,调用AMESim的液压库、机械库和信号库建立支腿液压系统模型。液压库用于建立液压系统模型,设置溢流阀、泵、过滤器、活塞缸、换向阀、液压锁以及压力传感器,模拟液压油在管路中的流量和压力的变化[9]。从机械库中调用电机、位移传感器以及质量块搭建系统模型。同时,由两个液控单向阀组合而成的双向液压锁,用于防止竖直支腿液压缸“掉腿”(活塞杆在重力作用下自动伸出)或“软腿”(活塞杆受力后自动缩回)而设计的专用阀。
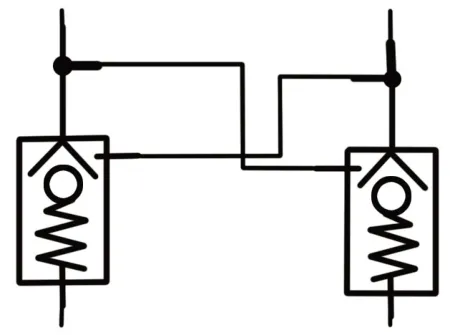
图6 双向液压锁仿真图Fig.6 Schematic Diagram of the Leg Hydraulic System
4.2 控制系统建模
为实现在复杂工况下,高空作业车底盘的自主调平,借助AMESim信号库,搭建控制系统,使得液压系统与控制系统之间形成闭环反馈,只有当调平精度满足工况要求时,控制系统控制各支腿的电磁换向阀处于中位,结束底盘调平。液压系统与控制系统仿真控制原理图,如图7所示。根据液压系统原理图在AMESim中建立仿真模型,首先从信号库中调用阶跃信号使得阀口一直处于全开状态,四支腿同步伸出[1],当液压缸接触至由负载模拟的地面时,进油口压力上升。其次,当支腿克服虚腿问题后,压力上升至一定数值后,此时位移传感器也同时输出一定位移,用于与其它支腿比较,以此确定最短支腿。完成这一阶段后,调平系统开始工作,根据各支腿与最短支腿之间位移差,确定电磁比例换向阀的开度以及持续时间[7]。单个支腿液压控制系统建模,如图8所示。
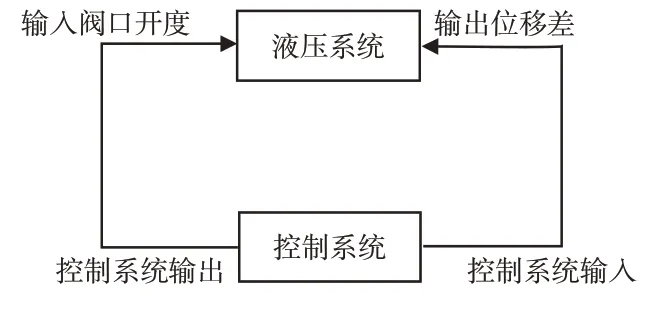
图7 液控原理图Fig.7 Hydraulic Control Schematic

图8 单个支腿液压与控制系统Fig.8 Single Leg Hydraulics and Control System
函数信号内主要参数,如表1所示。

表1 函数信号参数设置Tab.1 Function Signal Parameter Settings
对于控制系统而言,分为三个阶段。第一阶段为支腿自由伸出,支腿触地后,进入第二阶段为支腿调平阶段,底盘完成调平后。进入第三阶段,抬起整机。
函数信号1,用于监测各支腿是否触地。
函数信号2,在各支腿触地后,作为进入第二阶段调平阶段的开关。
函数信号3,用于控制底盘的调平精度,调平精度控制在3mm之内。
函数信号4,监测支腿1、3是否完成调平。
函数信号5,监测支腿1、2、3、4是否完成调平。
为实现快速调平,本设计采用PID控制,使得底盘在触地后,控制系统能够实现快速响应。函数信号6中,各参数设置值为Kp=40,Ki=0.5,Kd=0。
4.3 液压系统仿真参数确定
根据所确定的调平方法,由实际负载确定仿真系统的各个参数。
对于调压系统而言,主要由油箱、过滤器、泵、电机以及各类阀组构成。本设计中底盘以及上车部分总重约10t,由此可知四个液压缸各承受2.5t,底盘离地高度约为1200m,活塞杆运动速度为vmax=10.2×10-4m/s,活塞缸位移行程为700mm。考虑由于工况的不确定性,负载可能由三个支腿承担[10]。
即液压缸的自重阻力Ff、克服虚腿载荷Fd以及整机重量Fw
支腿各阶段承受负载以及运动方式,如表2所示。
表2 各阶段承载量Tab.2 Carrying Capacity at Each Stage
(1)确定系统额定压力
本设计的高空作业平台工作负载较大,为使系统紧凑、轻便,采用中或高压系统。暂定液压系统额定压力为20MPa,取回油背压为0.3MPa。
(2)确定液压杆内径
在第三阶段底盘液压支持结构需要克服自重负载、虚腿负载以及整机重量,即为最大轴向负载Fmax。

按最大轴向负载Fmax计算,液压缸内径D为:

式中:Pmax—液压杆最大工作压力;P0—回油背压;d—活塞杆直径。
按照活塞往复运动的速度比来计算,计算公式如下:

式中:φ—活塞往复运动速度之比。
在工程液压缸规格上,由于液压系统压力为20.3MPa。因此速度比取2。

将上述参数带入式(3)~式(5)中,得D=62.55mm,圆整,取D=63mm,d=45mm。
(3)计算液压缸最大工作压力
按最轴向负载Fmax=60980N计算液压缸最大工作压力:

将上述参数带入式(3)~式(8),可得P=19.7MPa。与暂定系统压力相符,取系统额定压力为21MPa。
(4)确定液压系统的流量

式中:q—流量;
v—平均流速;
A—通流截面;
qp—液压泵的最大供油量;
k—系统泄漏系数,一般取(1.1~1.3),大流量取小值,小流量取大值;
qmax—同时动作各执行元件所需流量之和的最大值。
对于节流调速系统,还要加溢流阀的最小溢流量,一般取0.5×10-4m3/s[11]。
由于上升速度vmax=10.2×10-3m/s

确定泵的类型为齿轮泵,假设电机转速1000r/min,此时泵的排量为Vd=2ml/r。
(5)活塞杆的直径校核
为实现高空作业平台的上升与下降,选用双作用单活塞杆液压缸两腔均能进油。液压缸的材料选用为45#钢,该材料为塑性材料,屈服极限σs=360MPa,则为安全系数,通常取为2,得[σ]=180MPa。
活塞杆直径必须满足下面条件:

带入参数,得:

显然,该值小于取定的d=45mm,所以满足设计要求。
液压系统仿真主要参数,如表3所示。
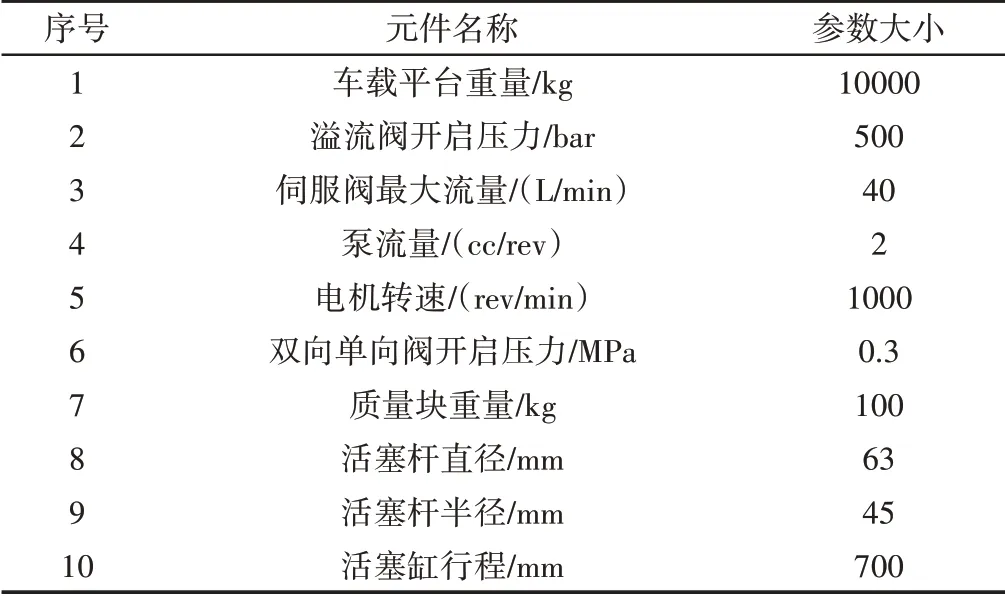
表3 液压系统主要参数Tab.3 Main Parameters of Hydraulic System
4.4 调平系统仿真与结果分析
本设计由于工况的不确定性,因而模拟地面的凹凸不平对于后续的分析液压缸的位移变化显得尤为重要。带入上述参数,调平系统仿真图,如图9所示。

图9 调平系统仿真图Fig.9 Leveling System Simulation Schematic
高空作业平台调平过程设置仿真时间为160s,仿真步长为0.1s。
对图10的仿真结果进行相应的分析。负载模拟地面情况,如图10所示。底盘调平位移差,如图11所示。

图10 负载特性曲线Fig.10 Load Characteristic Curve
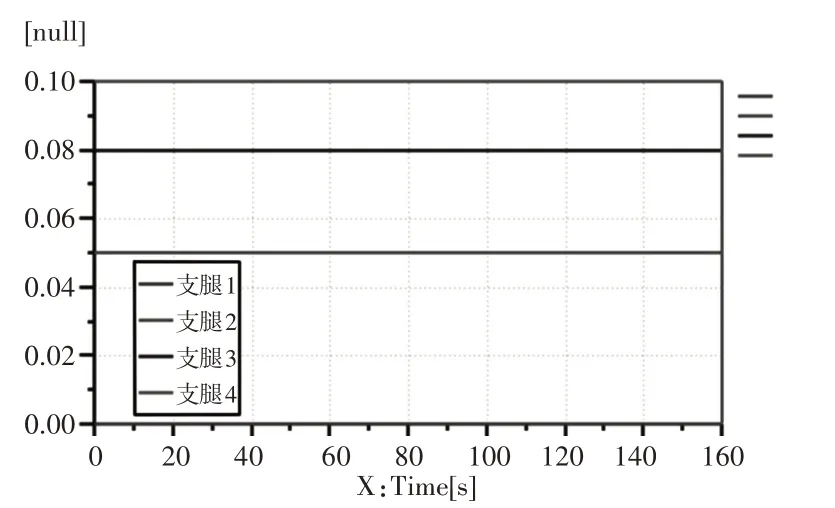
图11 底盘调平位移差Fig.11 Chassis Leveling Displacement Difference
从图10可以看出,最初状态的负载曲线相同,在第35s时,第一个支腿触地,其次是第二个、第三个以及第四个支腿。在65s时,底盘完成第一阶段触地过程。进入第二阶段的调平,根据图11的所测算出的调平位移差,调整各支腿的高度使得底盘水平,使得底盘满足工况要求。控制各支腿阀口开度曲线,如图12所示。
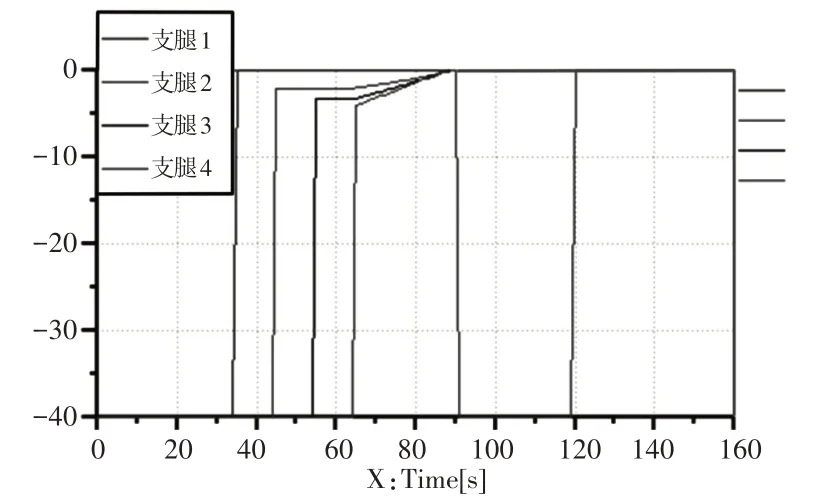
图12 阀口开度曲线Fig.12 Valve Opening Curve
从图12可以看出,阀口开度的大小与相应的工况构成闭环反馈,根据不同的工况对应的电磁比例换向阀的开口量是不同的。这里采用PID控制,第65s时,四支腿完全触地后,直至第90s时,底盘完成调平。控制系统只需35s,便可完成调平。完成调平后,各比例阀阀口全开,支腿上升30s,将整机抬起直至脱离地面一定高度。即第120s后,各换向阀处于中位。液压杆无杆腔压力变化曲线,如图13所示。
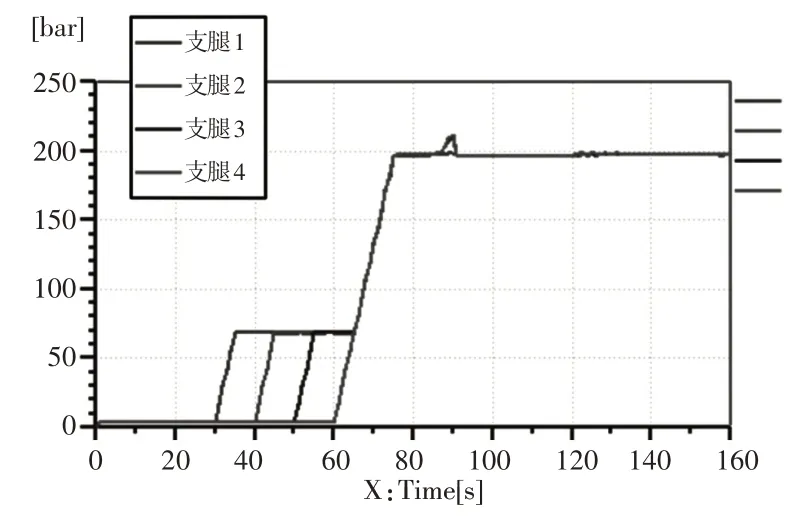
图13 无杆腔压力曲线图Fig.13 Rodless Cavity Pressure Curve
从图13中可以看出液压缸无杆腔的压力是随着负载变化而变化的。由第一阶段的压力稳定至1bar。由于各支腿需要克服虚腿,所以到第二阶段的各无杆腔压力上升至67bar。到第三阶段后,四支腿同时承载,压力出现小幅波动,最终稳定在200bar,液压系统整体的工作压力一直处于相对平稳的压力状态。调平油杆流量曲线,如图14所示。
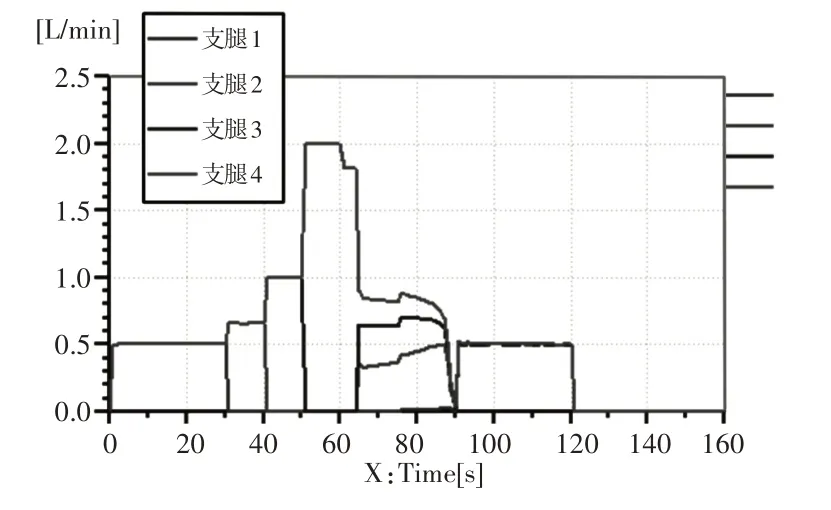
图14 流量曲线图Fig.14 Flow Curve
从图14中可以看出,在前30s各调平油缸的流量相同,四支腿快速伸出,在30s后第一个支腿触的流量不再上升。在第40s时第二个支腿触地,流量保持在0.67L/min,在第50s时,第三个支腿触地,流量保持在1L/min。在第60s时,第四个支腿触地,流量保持在2L/min。当各支腿都触地后,开始调平,控制系统控制各比例阀开度,使得位移缓慢增加,最终在第100s时,底盘调平,由于需要继续抬起整机,流量会发生一定的变化。在100s到120s之间阀口全开,流量增加至最大,保持在0.5L/min,四支腿同时伸出,使得整机离地。在(120~160)s,溢流阀溢流,流量为0。活塞杆的位移曲线图,如图15所示。仿真调平精度结果,如图16所示。
从图15中可以看出,底盘调平过程分为四步骤。第一步:支腿1、2、3、4同时伸长30s。第二步:缩短位移差。由图16可知,第二阶段是从第(65~90)s,因此最大调平误差为:

图15 活塞杆位移曲线图Fig.15 Piston Rod Displacement Curve
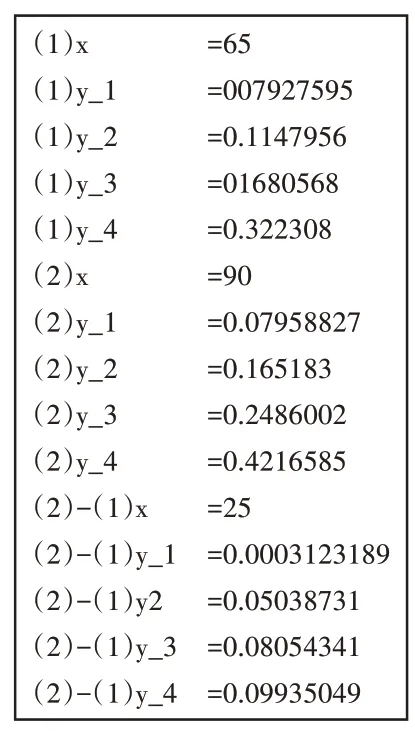
图16 支腿调平精度结果分析Fig.16 Analysis of the Results of the Leveling Accuracy of the Legs

由于Δmax=0.65mm≤3mm,调平精度满足作业要求。
第三步:抬起整机,从第(90~120)s开始抬起整机。第四步,在120s后,阀口关闭,整机结束上升,各电磁比例换向阀处于中位,活塞杆不再伸长,并以此状态进行作业。
5 结论
首先,这里基于高空作业车工作地面的平坦度对其底盘产生的影响着手分析,液控模型由于工况的不确定性变的复杂,因而结合相应的机械机构来确定合适的调平方法,并对液压系统以及控制系统进行了合理的建模,分析液压缸活塞杆的流量、压力以及位移特性曲线,由仿真结果可知,调平速度快且调平精度满足使用要求。
其次,由于工况的未知性,因此在支腿前端设置位移传感器,检测各支腿相应的位移量,通过一系列传递函数,反馈至各个比例换向阀的开口度,同时借助AMESim信号库中的负载信号来模拟地面,会造成液压系统的不稳定,需要建立相应的阀组,对液压系统进行稳压处理。
最后,这里运用试凑法来得出PID控制器的三参,一定程度上优化了调平系统的响应速度,但对PID控制器的参数设置,未来可尝试用模糊PID控制器或神经网络自学习模糊规则。
