磁悬浮控制敏感陀螺解耦设计与实验
2022-02-23王伟,李衡,兰宇,刘强
王 伟,李 衡,兰 宇,刘 强
(北京石油化工学院精密电磁装备与先进测量技术研究所,北京 102617)
1 引言
近年来,在高分对地观测卫星、空间望远镜等需求背景的推动下,对航天器平台系统提出了超稳、超静、超敏(简称“三超”)的性能指标要求[1-2]。现有姿控系统采用单闭环结构[3],执行机构与检测机构分离,严重制约了姿控系统三超性能提升[4-5]。
磁悬浮控制敏感陀螺具有姿态控制与姿态敏感双重功能,将执行机构和检测机构合二为一,使现有的大闭环(单环)姿控系统拓扑为三闭环姿态控制系统,融合了磁悬浮控制力矩陀螺的姿态控制[6]、转子式速率陀螺仪的姿态敏感[7]和磁悬浮主动抑振功能[8],可有效提升航天器平台三超性能。此外,检控合一消除了异位控制引起的精度缺陷,明显降低了姿态控制系统的体积、重量、功耗以及发射成本。这里提出了一种球壳气隙的磁悬浮控制敏感陀螺,介绍了其总体方案和工作原理,对球面平动磁阻力轴承和洛伦兹力偏转轴承进行了设计,通过有限元法对球形转子进行模态分析和静力学分析[9],并根据悬浮实验验证了分析结果的正确性。
2 磁悬浮控制敏感陀螺
2.1 总体方案
这里提出的一种基于球面内转子磁悬浮控制敏感陀螺,结构,如图1所示。该系统主要由球面磁阻力轴向轴承(控制球形转子沿z轴方向平动)、球面磁阻力径向轴承(控制球形转子沿X、Y方向平动)、球形飞轮转子(额定转速9000r/min,额定角动量15Nms,最大偏转角±1°)、高速电机(带动转子高速旋转)、洛伦兹力轴承(控制转子绕X、Y轴偏转)和径/轴向电涡流位移传感器(检测转子径/轴向位移)组成。磁轴承定转子磁极面均为球面,陀螺系统定转子间的气隙是球壳状。悬浮工作时,转子所受电磁悬浮力始终指向球心。转子球心与质心重合时,悬浮力始终过质心,转子在发生偏转前后,悬浮力不会对转子产生偏转干扰力矩,即消除了平动悬浮对偏转悬浮的干扰。
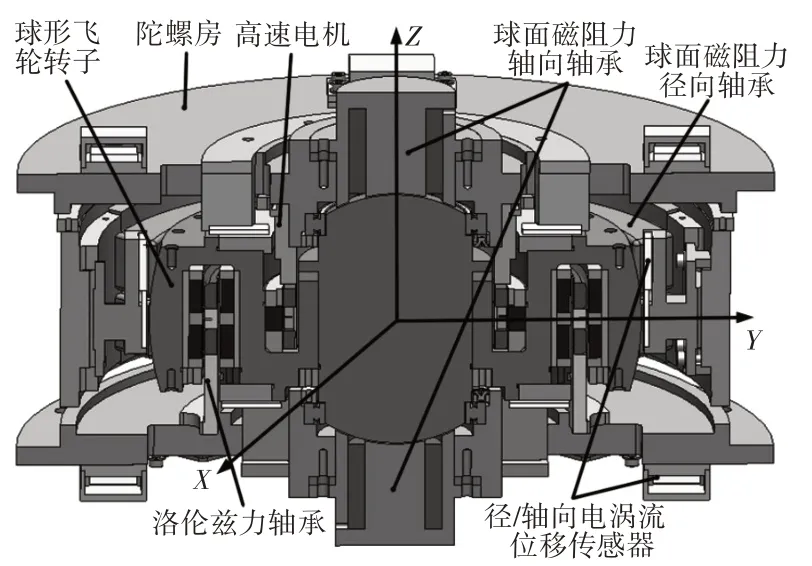
图1 磁悬浮控制敏感陀螺Fig.1 Magnetically Suspended Control & Sensitive Gyroscope
2.2 工作原理
磁悬浮控制敏感陀螺具有三自由度姿态控制和两自由度姿态角速率敏感双重功能。控制模式下,利用驱动电机改变高速转子转速输出轴向单自由度力矩,借助洛伦兹力轴承驱使高速转子偏转,产生径向两自由度进动力矩。敏感模式下,利用洛伦兹力轴承精确补偿高速转子偏转干扰力矩,使转子具有很好定轴性,敏感航天器姿态。洛伦兹力轴承工作力矩T为:

式中:k—偏转电流刚度;n—单个绕组匝数;B—洛伦兹力轴承气隙磁场强度;L—单圈绕组有效长度;R—洛伦兹力轴承绕组所在圆的半径;i—绕组电流;i1—转子稳定悬浮所需电流;i2—转子进动控制电流;i3—航天器姿态角速率敏感电流。
3 磁轴承设计
3.1 球面磁阻力轴承
球面磁阻力轴承用于精确控制转子径/轴向平动悬浮,其磁路结构方案,如图2所示。径向球面磁阻力轴承定子由八个球面磁极组成,分布在径向±X和±Y方向上,每个方向沿轴向(Y向)放置两个磁极。两个成对轴向球面磁阻力轴承定子放置于球形转子上下端。径/轴向磁阻力轴承的六个通道磁路相互解耦(不重合),从而实现了六个控制通道间的力磁解耦,有利于实现高精度平动悬浮,其相应主要设计参数,如表1、表2所示。
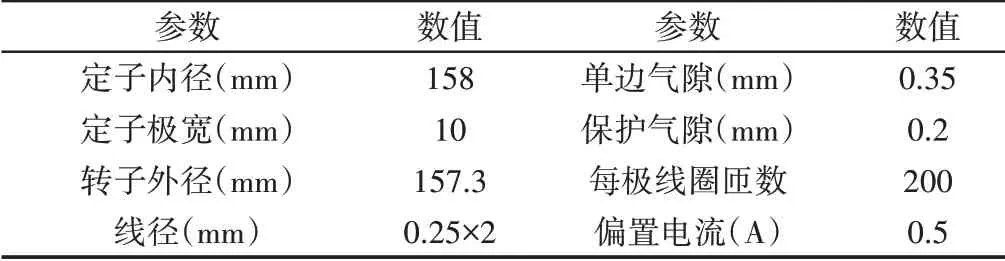
表1 径向磁轴承设计参数Tab.1 Parameters of Radial Magnetic Bearing
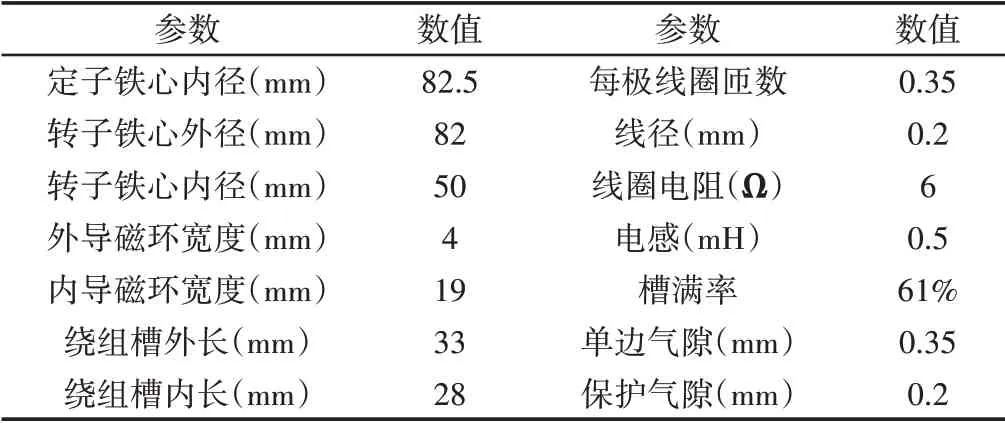
表2 轴向磁轴承设计参数Tab.2 Parameters of Axial Magnetic Bearing

图2 球面磁阻力轴承Fig.2 Spherical Magnetic Resistance Bearing
3.2 洛伦兹力轴承
这里所研究的洛伦兹力轴承主要由四圈径向充磁磁钢、两圈导磁环、两圈隔磁环和四个正交放置的绕组组成,其结构,如图3所示。同层磁钢充磁方向相同,上下层磁钢充磁方向相反,确保四圈磁钢在球形转子内部形成一个闭合的永磁回路(如图3带箭头的实线所示)。四个绕组通过环氧树脂胶真空固化在定子骨架前后左右四个方向上,且置于两磁气隙中心。单个通电绕组上下部分等效长度相同,电流方向相反,在气隙内相反的永磁磁场作用下,产生大小相同、方向相同的洛伦兹力。同一方向成对使用的两个通电绕组产生的两个悬浮力大小相等,方向相反,产生径向偏转控制力矩。相较于磁阻力轴承,洛伦兹力轴承的输出力矩与电流成正比,且与转子位移无关,消除了位移负刚度对转子悬浮的影响,具有非常好的控制性能和精度,其相应主要设计参数,如表3所示。

图3 洛伦兹力轴承Fig.3 Lorentz Force Bearing
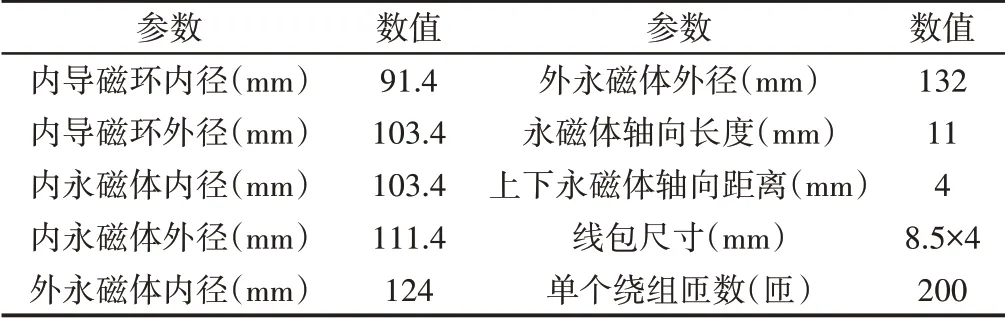
表3 洛伦兹力轴承设计参数Tab.3 Parameters of Lorentz Magnetic Bearing
4 有限元分析与实验
4.1 有限元分析
磁悬浮控制敏感陀螺额定转速为9000r/min,对应的转频为150Hz。为避免转子工作时,因刚度不足产生共振,要求转子一阶共振频率高于两倍转频(300Hz)。利用有限元分析软件Ansys18.0对转子进行模态设计与分析结果,如图4所示。转子的一阶共振频率为2932Hz,远高于转子转频,满足转子刚度要求。
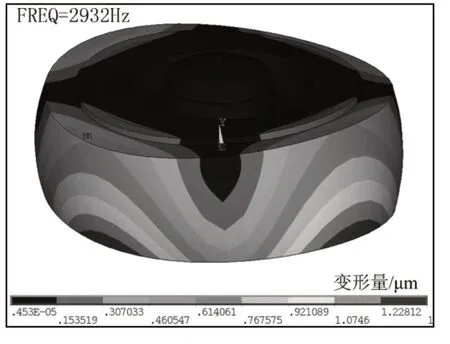
图4 转子一阶模态Fig.4 The First Mode of Rotor
陀螺转子在额定转速下,因自身离心力作用产生一定的应力和变形,且转子磁极处过大的变形会改变转子径向球壳形状,影响转子悬浮精度。利用有限元分析软件Ansys18.0对转子进行静力学分析,得到的应力云图和应变云图,如图5所示。转子的最大等效应力为45.9MPa,远小于转盘材料FeCr15屈服应力430MPa。转子最大变形为15.9μm,远小于径向磁阻力轴承间隙350μm,球形转子的求结构变化很小,可较好满足转子高精度悬浮。
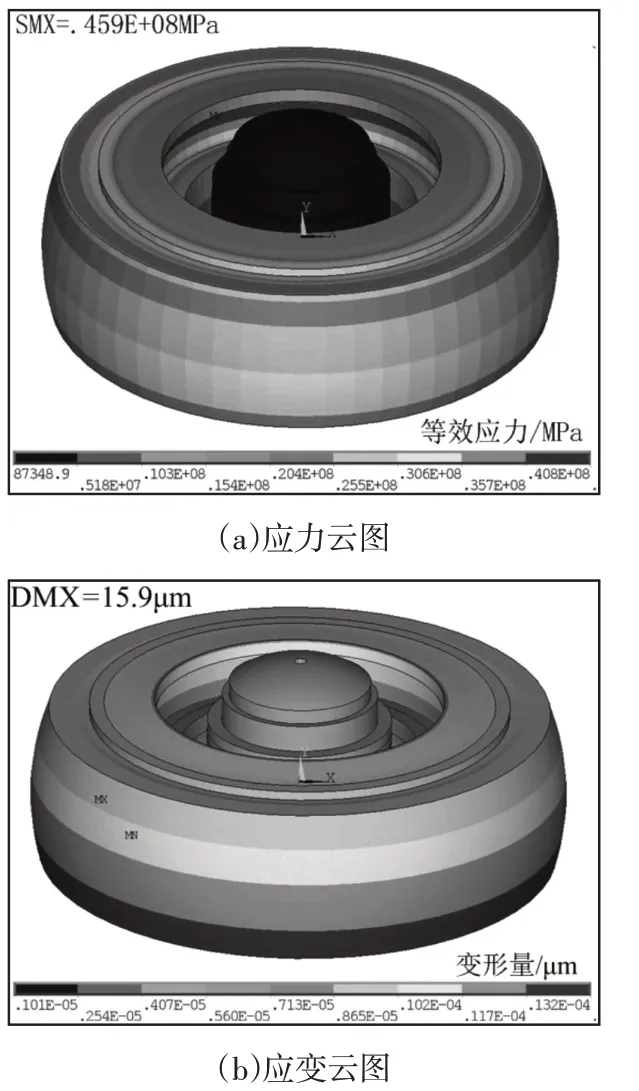
图5 静力学分析Fig.5 The Statics Analysis
4.2 测试实验
根据设计结果研制了一台磁悬浮控制敏感陀螺样机,转子上的三个球面采用网格研磨加工,球面球度为3μm,表面粗糙度不低于0.1μm,实物,如图6所示。通过研磨平台调整调心环的厚度,使转子径轴向球心重合。利用在线动平衡检测转子两端不平衡质量,将对应的配重螺钉拧入转子两端配重孔内,调整转子质量均匀分布。完成陀螺整机装配调试后,对整机进行高速悬浮测试实验,并利用高精度数字示波器检测球形转子振动位移的实验结果,如图7所示。通过示波器测得转子的一阶共振频率为2881Hz,与有限元仿真分析结果2932Hz相差51Hz,误差为1.8%。测试结果与仿真结果基本一致,表明有限元分析结果的正确性。
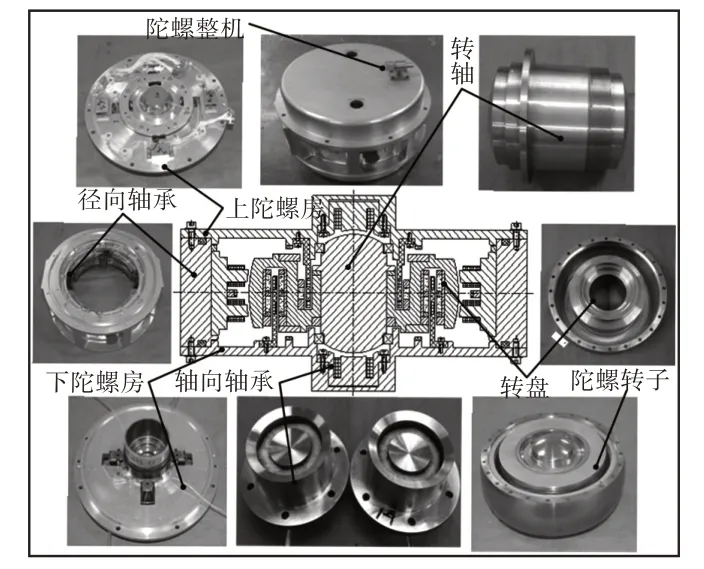
图6 磁悬浮控制敏感陀螺Fig.6 Magnetically Suspended Control & Sensitive Gyroscope
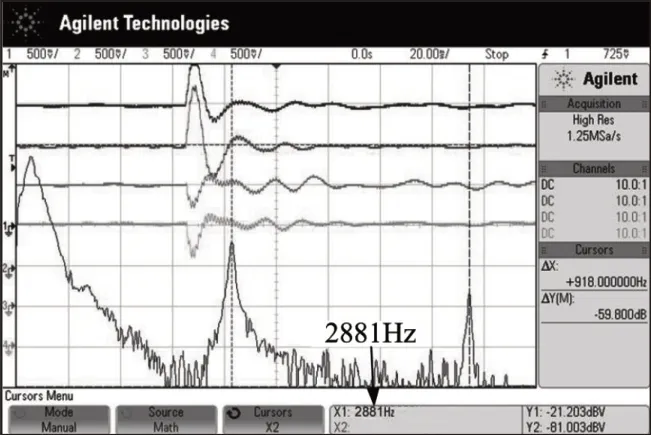
图7 实验结果Fig.7 Experimental Results
5 结论
这里提出了一种磁悬浮控制敏感陀螺、介绍了其总体方案和工作原理,并对平动悬浮磁阻力轴承和偏转悬浮洛伦兹力轴承进行了具体设计。在此基础上,从转子刚度、应力、应变对球形转子进行模态分析和静力学分析。根据设计结果研制了一台磁悬浮控制敏感陀螺样机,并对其进行悬浮测试,结果表明仿真分析结果与测试结果误差为1.8%,验证了仿真分析方法的正确性。
