似然函数和随机滤波的点云去噪方法研究
2022-02-23唐瑞尹范乃德王长伟
唐瑞尹,范乃德,史 涛,王长伟
(华北理工大学电气工程学院,河北 唐山 063210)
1 引言
近年来,随着计算机技术、机器视觉以及3D打印技术的发展,在进行物体三维重建时经常要用到激光扫描这种非接触式的测量方式。该方法使用起来比较简单方便,避免了直接接触物体,不受物体形状的限制,有效降低了测量过程中因物体接触而带来的随机误差,提高了测量精确度。另外,采用线结构光扫描的方式使得测量的速度更快、效率更高[1]。
但是,在利用扫描数据进行曲面重构时,由于诸多原因,比如说激光散斑,测量装置的震动,环境干扰以及扫描装置本身的缺陷等,在数据的获取过程中不可避免的会混入不合理噪声点,这样会导致重构的曲面不光滑。所以说需要对扫描得到的数据进行去噪处理。国内外的许多学者都对由随机误差而产生的噪声点进行了研究,因此对噪声点的处理可以采用很多不同的方法。
人机交互的方法是逆向工程中比较简单的点云数据去噪方法,它的工作原理是简单的通过图形显示来识别较为明显的噪声点,然后在点云数据中将这些噪声点去除[2]。在面对大数据量时,显而易见这种方法具有很大局限性,是不适合这种情况的。扫描后点云数据的排列方式直接影响着去噪所需采用的方法。常见的点云数据排列方式为行乘列,通常叫做阵列数据。通过线结构光扫描得到的点云数据,数据点通常在同一层的截面线上,可以分为无组织数据,部分散乱数据和完全散乱数据这三类[3]。对于前两种数据噪声点一般采用平滑滤波的方法对扫描线逐条进行去噪处理,但是这种方法并不适用于完全散乱数据的噪声点处理,因为该数据并没有点与点之间的拓扑关系。目前并没有哪种合适方法来用于对完全散乱数据的去噪处理[4]。这里采用了似然估计函数和随机滤波结合的方法对扫描数据进行了有效的去噪处理。
2 点云数据获取
本研究是基于win7平台利用HALCON软件开发的,选用德国映美精生产的型号为DFK23G274的GIGE接口CCD相机,像素分辨率为1600×1200,镜头型号为computar的m1614-mp2。激光器采用型号为sK53-515瀚光的红光线结构光激光器,波长为650nm输出功率为30mW。平面靶标是打印的7×7的圆点形标靶模型,规格为(100×100)mm。实验平台,如图1所示。
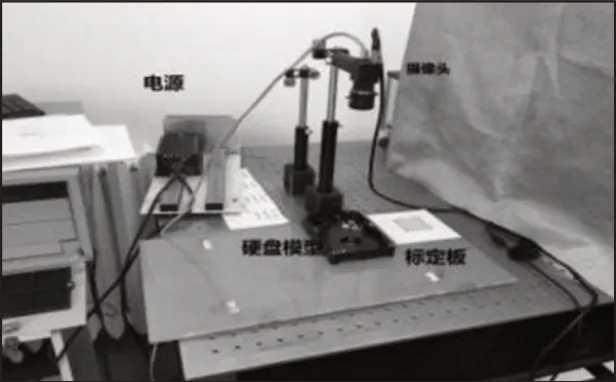
图1 实验平台Fig.1 Experimental Platform
在应用算法进行分析时,首先要得到物体的三维点云数据,三维点云数据的获取是通过线结构光三维扫描技术来实现的[5]。在线结构光的测量中,激光器发出的激光投射在被测物体的表面上,由相机获取打在物体表面的光条图像,当被测物体在光平面下移动时,物体上的光条会随着物体的移动而发生相应的形变,在相机上所成的像也会发生相应的变化。通过解调光条的形变,提取光条中心并计算相应的解析几何关系,最后得到被测物体的三维点云数据[6]。
线结构光采用非接触式视觉检测的方式,具有精度高、测量简单等优点,通过对物体上光条的测量来替代传统的直接测量方式。运用此方法需要对系统做精确标定和精确的光条中心提取,系统标定包括摄像机位姿的标定,光平面位姿的确定和移动位姿的标定;光条中心提取采用传统的灰度重心法,提取的精度能达到亚像素级别[7]。这主要是为了确保被测物体的实际坐标对应于计算机的像素坐标,随后对图像进行信息的采集,把提取的光条中心坐标当作是物体实际坐标,最后获得被测物体的三维点云数据。
2.1 系统标定
本研究系统标定采用张正友三步标定法使得物体的实际坐标与计算机像素坐标逐一对应。三步标定法即摄像机位姿标定,光平面位姿标定和移动位姿的标定。其中摄像机位姿参数如表1所示,光平面位姿,如表2所示。运动位姿,如表3所示。
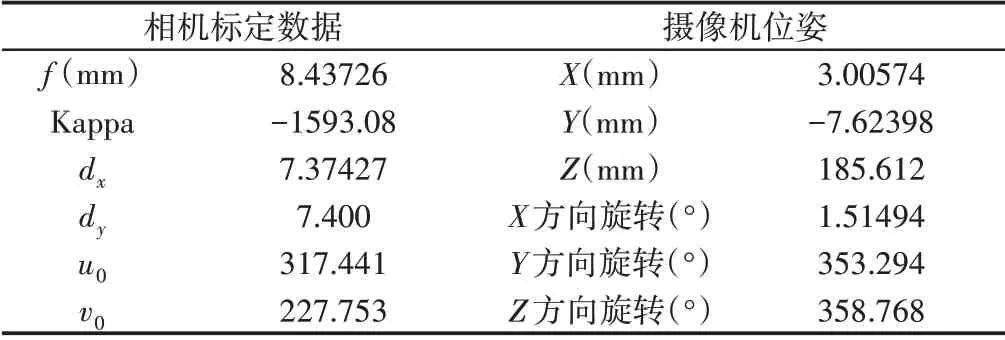
表1 s摄像机位姿参数Tab.1 Camera Pose Parameters
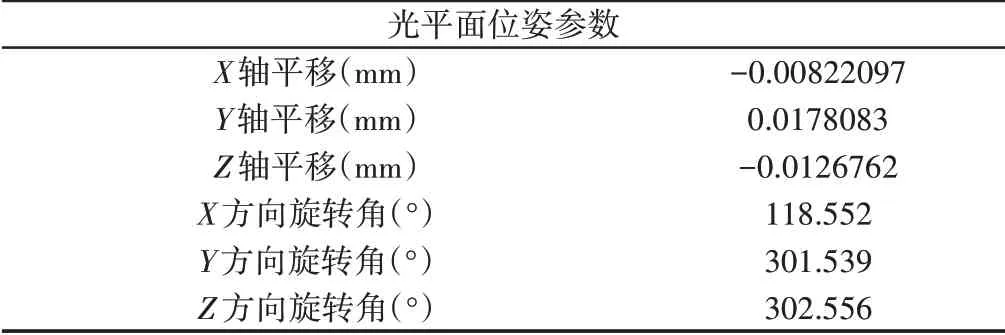
表2 光平面位姿参数Tab.2 Optical Plane Pose Parameters
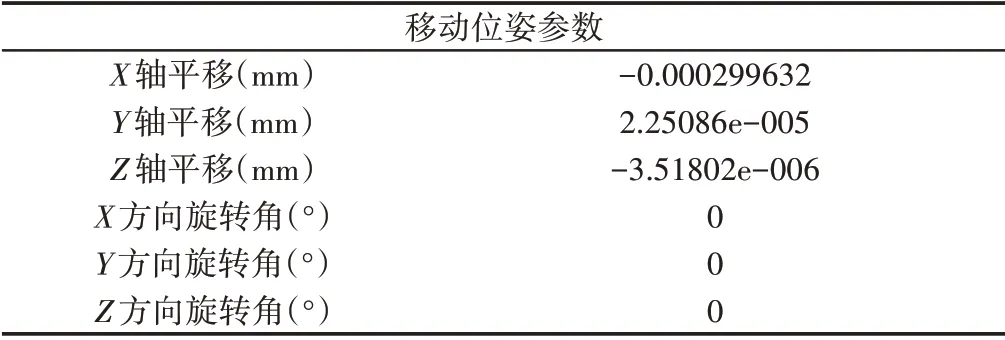
表3 运动位姿参数Tab.3 Sports Pose Parameters
2.2 光条中心提取
采用灰度重心法的方式对激光条中心进行提取。在获得图像时,把激光条整体的近似方向当作坐标轴ov方向。根据ov的方向来获得以单像素为单位的ou方向上激光条的灰度重心点,利用式(1),可以得到每一行像素的激光条中心点坐标[8]。

式中:u,vi—光条在第i行灰度值;uic,vic—第i行的光条中心坐标。
经历过I里面的所有像素点,就可以得到全部光条的中心点坐标。提取的光条中心,如图2所示。从而得到所需的三维点云数据。
图2 光条中心图像Fig.2 Central Image of the Light Ba
3 去噪方法描述
3.1 似然函数法
在对点云数据进行去噪处理时,可以先采用似然估计函数的方法,定义一个光顺似然函数L,该函数代表了点云数据中任意一点X∈R3在采样表面的概率。在处理过程中把散乱点云数据中的每一个采样点沿着似然函数L的梯度方向移动到局部最大似然值点。为每一个采样点定义一个局部似然函数L1,L2,该函数由点P所在的邻域{Pi}中任意点X到该邻域的最小二乘拟合平面距离的平方所确定。根据点X到最小二乘拟合平面距离的平方确定局部似然估计函数L1(x)如下:

根据不同的点到最小二乘平面的距离有所不同,可以知道距离平面越近似然性越高。为了降低每一个L1的影响,这里使用单调递减的加权函数φi,因为任何一个点Pi在相应位置X的似然值会随着距离的加大而减小[9]。在确定了似然函数后,需要把得到的采样点向似然值的最大处平移,平移过后的落点很大程度上接近了物体表面的真实位置。
3.2 随机滤波法
随机滤波发法的原理是:假设测量的所有点云数据构成了扫描物体的表面,对表面进行分割使其变成一条条线,j表示结构光扫描线数,i表示扫描线上的点;设任何一条扫描线上第i个点与第(i+1)个点的距离为d1,第(i+1)个点与第(i+2)个点的距离为d2,第i个点与第(i+3)个点的距离为d3。因此:

假设x=d3-d1,H=|d2-d1|,给定阈值X,P(i+1,j)和P(i+2,j)与P(i,j)连线的夹角为θ1,P(i+3,j)和P(i+2,j)与P(i,j)连线的夹角为θ2,P(i+3,j)和P(i+4,j)与P(i,j)连线的夹角为θ3。这三个夹角具有方向,规定顺时针为反方向,逆时针为正方向。
如果x<0,或0<x≤X1,分别计算θ1、θ2,如果θ2与θ1的旋转方向相反,则P(i+1,j)这个点为噪声点,在点云数据中把该点去除;如果θ2与θ1的旋转方向相同,再计算θ3,如果θ3与θ1的旋转方向相反,则P(i+1,j)这个点为噪声点,在点云数据中把该点去除;如果θ3与θ1的旋转方向相同,但0≤H≤X2,则认为P(i+1,j)点是噪声点,在点云数据中把该点去除;否则要把P(i+1,j)这个点予以保留,并且这时可初步判定P(i+1,j)这个点为区域分割特征点。这种方法主要应用于由强干扰信号产生的随机误差的处理,可以去掉点云数据中比较明显的噪声点。
如果X1<△,但0≤H≤X2,分别计算θ1、θ2,如果θ2与θ1的旋转方向相反,则P(i+1,j)这个点为噪声点,在点云数据中把该点去除。如果θ2与θ1的旋转方向相同,再计算θ3,如果θ3与θ1的旋转方向相反,则P(i+1,j)这个点为噪声点,在点云数据中把该点去除;如果θ3与θ1的旋转方向相同,则P(i+1,j)点予以保留[10]。
3.3 这里算法实现步骤
(1)根据似然估计函数L1(x),平移采样点使其接近物体表面的真实位置。
(2)对任意一条扫描线上的数据点,计算d1、d2、d3;给定阈值X1、X2。经实验X1=1*10-5,X2=1*10-5。
(3)根据随机滤波法判断准则进行判断。
(4)重复步骤(2)和步骤(3),直到一条扫描线上的点处理完毕。
(5)按上述步骤处理所有的扫描线。
4 去噪处理结果与分析
这里以一个普通的硬盘壳来进行实验,根据前面的步骤得到硬盘的三维点云图,如图3所示。可以看到没有经过处理的点云图具有很多的噪声点。为了方便观察去噪区别,利用似然函数法进行去噪处理得到点云图,如图4所示。利用随机滤波法进行去噪处理得到点云图,如图5所示。然后利用这里提出的两种方法结合的方式进行去噪处理得到点云图,如图6所示。通过对比可以看到经过两种方法结合处理过后,点云图的噪声点去除了绝大部分。

图3 原始点云图Fig.3 Original Point Cloud Map

图4 似然函数去噪图Fig.4 Likelihood Function De-Noise Figure
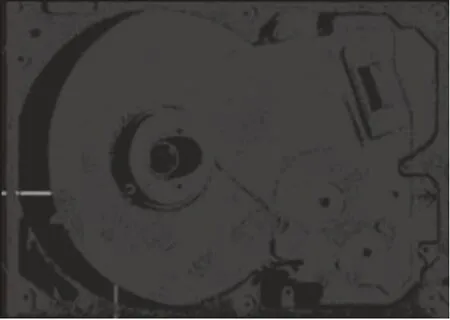
图5 随机滤波去噪图Fig.5 Random Filter De-Noise Figure
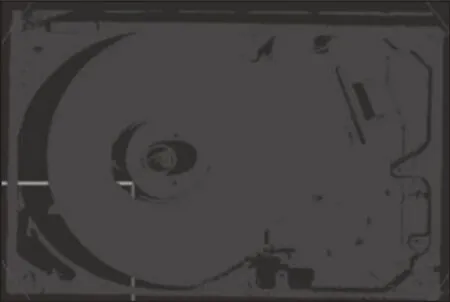
图6 这里方法去噪图Fig.6 Method Denoising Graph in this Pape
为了更加方便地检验这里方法的有效性,在进行去噪处理时记录了似然估计函数、随机滤波法以及这里方法分别对噪声点的去除情况,如表4所示。这样可以清楚地看到采用不同方法进行去噪处理的差异性。通过上面的点云图以及去噪结果对比可以清晰地看到这里方法的优越性,利用文中提到的方法可以有效地去除点云数据中的噪声点,不仅使点云数据得到了简化,同时提高了曲面重构的准确性,使得曲面重构有了更高的精度。
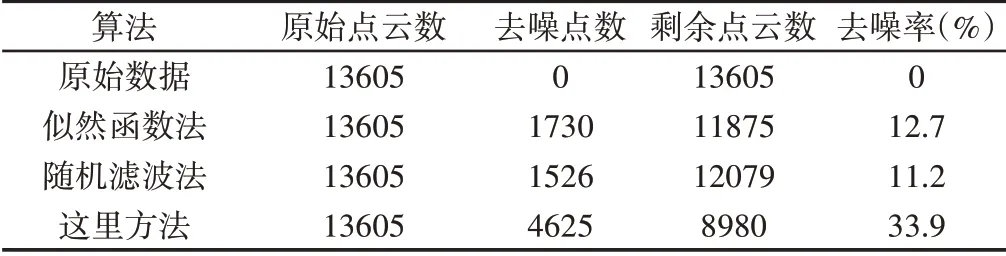
表4 三种方法点云去噪结果对比Tab.4 Comparison of Three Methods of Point Cloud Denoising
5 结论
通过线结构光扫描得到的点云数据不可避免的含有噪声点,因此对点云数据的去噪处理是十分重要的,因为点云数据的精确度直接影响了曲面重构的准确性,这里提出的方法可以有效的去除点云数据中的噪声点,通过实验可以清晰地看到去噪效果明显,且计算简单,速度快。大大的提高了曲面重构的准确性,为曲面重构带来了便利。但是对于点云去噪的处理仍存在一些问题需要进一步的改进。比如说在完成去噪后,数据能达到什么样的准度,这是一个难点,也是下一步需要研究的工作。
