双频Android手机GPS/BDS伪距单点定位 增强方法与性能评估
2022-02-18崔均烨宁一鹏米宏志柴大帅姚国标桑文刚
崔均烨,宁一鹏,米宏志,柴大帅,姚国标,桑文刚
(山东建筑大学测绘地理信息学院,济南 250101)
0 引言
近年来,依托消费级全球卫星导航系统(Global Navigation Satellite System,GNSS)芯片的智能终端成为市场主流,尤其是以智能手机为载体的位置服务已成为日常生活必须部分,在定位导航、位置分享、消防减灾、医疗救援等多方面得到广泛应用。与测地型接收机等GNSS终端不同,智能手机通常采用体积小、成本低的线性极化天线和低成本、低功耗的导航芯片,这势必会影响GNSS数据质量以及定位精度。2016年,谷歌Android Nought 7.0及以上版本的操作系统中开放了GNSS原始数据接口,使得智能手机的原始观测值及以其为基础的精密定位研究引发了众多关注。
已有诸多专家学者在智能手机的GNSS数据质量及高精度定位方面进行了评估与研究。文献[6]指出手机中的duty cycle机制和手机天线相位中心的不明确会影响手机端定位精度。文献[7]分析了Nexus9的观测数据,发现伪距噪声与信噪比相关性更强,采用信噪比定权比较合理。文献[8]进行了Android智能手机质量分析,得出信噪比与伪距观测值中误差呈相反关系。文献[9]采用小米6X的观测数据进行了算法比较,并对Kalman滤波法用于高精度定位的可行性进行了初步研究,但单频智能手机的低信噪比特性产生的粗差限制了其定位精度的提高。文献[10]采用载波相对定位的手段,可以改善智能终端的定位精度,但手机端载波观测值周跳较多,不利于估计整周模糊度,难以形成正确的固定解。文献[11-12]采用智能手机双频GNSS观测值,在静态测试中水平方向上精度达到了亚米级,然而其动态测试未获得较好的结果。总体来看,关于大众智能手机GNSS原始观测数据的评估不系统,针对低成本GNSS芯片定位算法的适用性和有效性尚不明确。
针对以上问题,本文从信噪比、DOP值、伪距残差等方面对原始观测数据的质量及特征进行综合分析,建立了高度角定权模型、信噪比定权模型和Kal-man滤波模型等对其定位性能进行评估,并设计了静态和动态实验以验证算法的有效性。
1 评估分析方法设计
1.1 质量分析要素
1.1.1 信噪比
信号传播过程中的质量一般通过接收机功率进行衡量,噪声的干扰在信号传播中十分常见。在传播过程中,卫星信号受到对流层延迟、电离层延迟和多路径等诸多因素影响,并且信号传输能量也有所不同,所以信噪比水平也存在不同。信号质量的好坏一般采用信噪比(Signal to Noise Ratio,SNR)进行评价,信噪比的含义为接收到的信号的功率比上噪声的功率,即

(1)
1.1.2 DOP值
衡量定位系统精度的重要指标之一就是精度因子(Dilution of Precision,DOP),其中DOP定义为将用户位置误差和时间偏差误差与伪距误差相互联系起来的几何因子。
假设可见卫星的方向余弦矩阵为,定义权逆阵(),则可以得到精度因子为

(2)

(3)

(4)
(5)
1.1.3 伪距残差
伪距观测值受到外界环境的影响,进而影响伪距定位精度,通过分析伪距残差可以一定程度上反映伪距观测值的质量状况。伪距观测方程如下

(6)

利用最小二乘解算式(6)得到未知参数,将其代入误差方程,得到伪距残差如下
=-
(7)
其中,为残差;为观测方程线性化系数矩阵;为未知参数;为卫地距概略值。
1.2 定位算法设计
1.2.1 高度角定权模型
根据卫星信号高度角确定观测量的先验方差,降低高度角较低时,受大气延迟误差和多路径误差影响较大的观测值对定位结果的影响,在使用测量型接收机的高精度定位中,一般采用卫星高度角相关的定权方法以获得更好的定位效果。本文采用常见的三角函数模型

(8)
其中,为卫星观测值中误差;为卫星高度角。
1.2.2 信噪比定权模型
信号传输过程中,信噪比数值会产生变化,因此,信噪比在一定程度上可以反映观测值信号质量,针对这一特点给出定权公式如下

(9)
(10)
式(9)为信噪比定权的方差阵。式(10)为根据信噪比值确定的观测值中误差,其中、通过MATLAB进行伪距残差拟合,=31m,=150m。
1.2.3 Kalman滤波法
采用Kalman滤波器构成系统进行单点定位,必须根据不同的定位模式采用不同的动态模型,这样可以更完全和真实地体现系统特性,使滤波进行平稳。本文对静态数据采用均速动态模型,对动态数据采用匀加速动态模型,并在此基础上引入抗差Kalman滤波,进一步提升其定位性能。基于马氏距离的检验统计量可定义为


(11)


(12)

针对观测粗差,引入抗差因子对观测噪声协方差矩阵进行调节,则调整后的观测噪声协方差矩阵可以表示为

(13)
统计检验量变为

(14)
其中,为残差。因此,Kalman滤波增益矩阵可改写为

(15)
2 观测质量评估与分析
2.1 数据采集方法
为评价双频智能手机GNSS观测数据质量,本文采取支持双频GPS的手机小米10(以下简称MI10)、华为mate30(以下简称mate30)、荣耀20pro(以下简称20-pro)与海星达H32测地型接收机进行对比实验,开展静态实验与动态实验。本次静态实验地点位于山东建筑大学东门广场,动态实验地点位于山东建筑大学操场。观测条件均为良好,周围无高楼遮挡,手机端采用GnssLogger APP进行数据采集,并通过量取接收机天线中心到手机天线中心的距离进行外参标定。实验环境及观测时段的GPS、BDS卫星分布情况如图1所示。
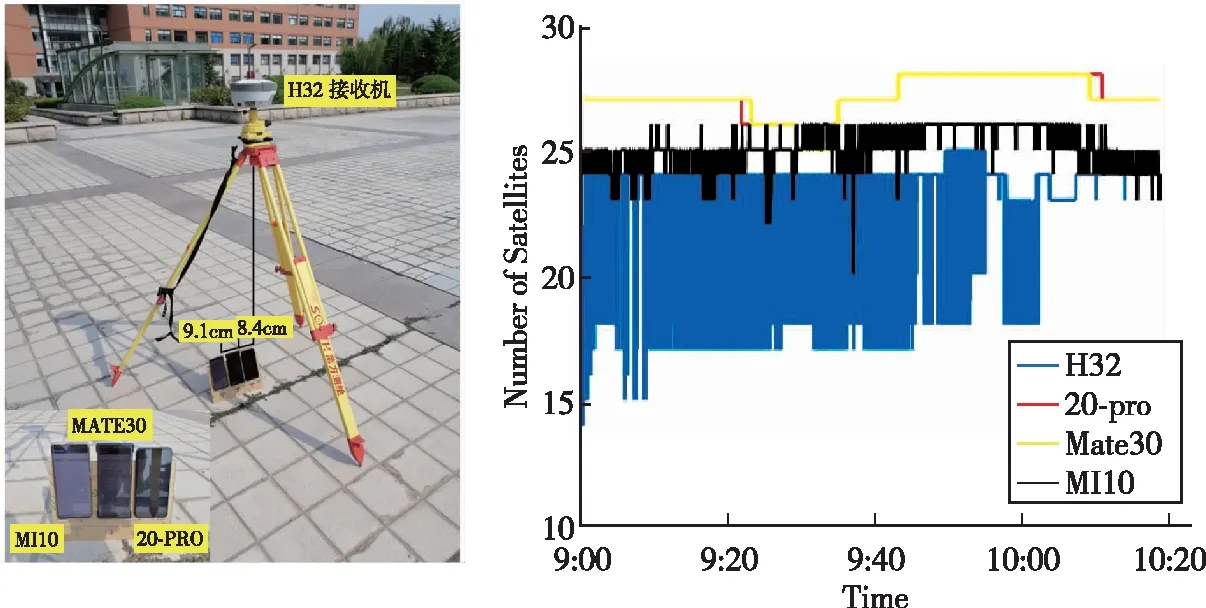
图1 静态实验图与观测时段GPS/BDS卫星颗数Fig.1 Static experiment map and the number of GPS/BDS satellites in the observation period
2.2 信噪比分析
为了分析三部不同型号智能手机原始观测值的信噪比情况,图2给出了从MI10、mate30、20-pro三部手机中提取出的4颗高水平卫星信噪比情况与H32测地型接收机相应卫星信噪比比对结果。从图2可以看出,三部智能手机的最高水平信噪比集中在40dBHz左右,20-pro与mate30中的GPS信噪比整体略高于BDS,而MI10的GPS信噪比低于BDS。同时三部智能手机的信噪比水平均低于H32测地型接收机,这是由于Android智能手机硬件成本低廉,GNSS芯片性能有限,接收信号中的噪声明显高于前者。
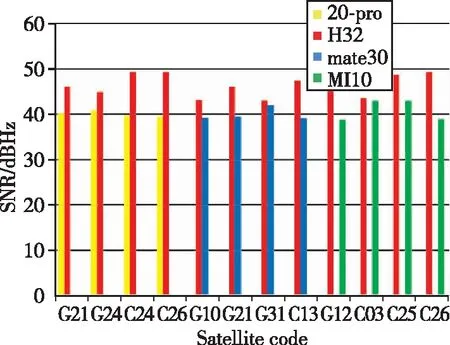
图2 手机各颗卫星最高信噪比与接收机信噪比对比情况Fig.2 Comparison of the maximum SNR of each satellite of smartphones with the SNR of the receiver
为了探究信噪比和高度角之间的关系,选取部分卫星观测数据分析平均信噪比与高度角的变化关系,如图3所示。结果表明,对于测地型接收机而言,卫星信噪比与高度角之间存在着正相关性,但手机的信噪比与高度角之间的相关性不足。20-pro手机的信噪比表现出了不稳定性,mate30观测的部分卫星在高度角低于60°时信噪比迅速下降,MI10中的G32号卫星观测中信噪比甚至出现断崖式跳跃。图4所示为同一时刻G15卫星的信噪比随高度角变化情况,H32接收机与几部手机均在高度角低于15°时出现信噪比水平下滑情况,测地型接收机信噪比情况虽有振荡,但整体稳定符合规律,几部手机均出现信噪比突变不稳定的情况,这与智能手机内部低成本线性极化天线有关。

(a) H32 G24卫星信噪比
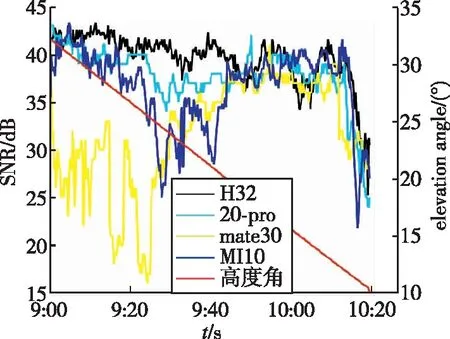
图4 同一时刻G15卫星不同手机与接收机对比情况Fig.4 Changes of the SNR of G15 satellites from different mobile phones and receivers with altitude angle at the same time
2.3 DOP值分析
如图5所示,H32接收机的DOP值与三部智能手机的DOP值基本一致,平均值皆在2以下,评级为最优。接收机的GDOP为1.3,PDOP为1.2,三部智能手机的GDOP均为1.2,PDOP为1.1或1.0。接收机的GDOP和PDOP略高于手机。根据图1所示观测时段手机端卫星颗数始终多于接收机,表明手机端卫星空间几何分布情况要优于测地型接收机,原因来自于接收机右旋极化定向天线与手机线性极化天线特性不同。

(a) H32 DOP值
2.4 伪距残差分析
伪距观测值质量是影响定位精度最主要的因素,不同卫星高度角对应的伪距噪声水平并不一致。图6~图8给出了三款手机的伪距残差结果。由结果可知,在伪距粗差方面,mate30控制的最好,小米10控制的最差。mate30、荣耀20-pro、小米10的伪距残差RMS均值分别为4.32m、 5.75m和11.15m。几部智能手机均出现较大的伪距粗差情况,这是因为测试场景处于陶瓷地砖地面,受到地面多路径效应和手机接收噪声影响等。同时针对手机的这一特性,在解算前根据高度角对观测数据进行了预处理。考虑到三者上市时间,说明厂家在改善GNSS芯片功能方面有所提升。

图6 华为mate30伪距残差Fig.6 Pseudorange residual of Huawei mate30
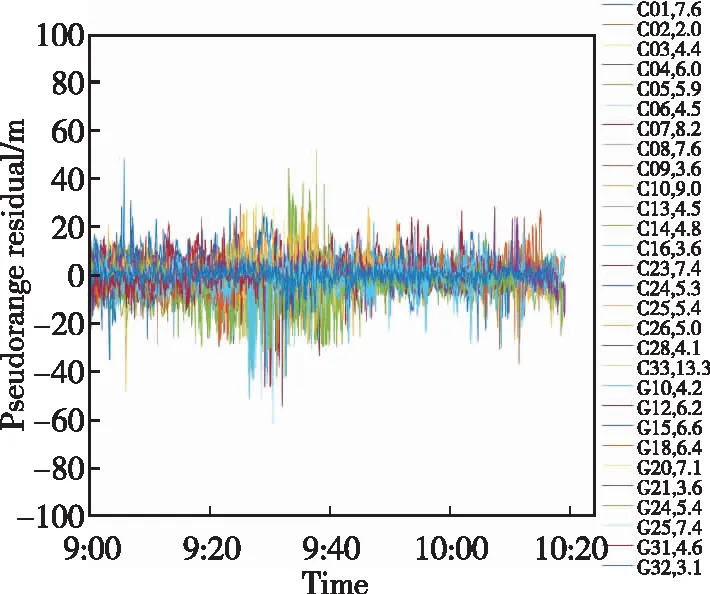
图7 荣耀20-pro伪距残差Fig.7 Pseudorange residual of Honor 20-pro
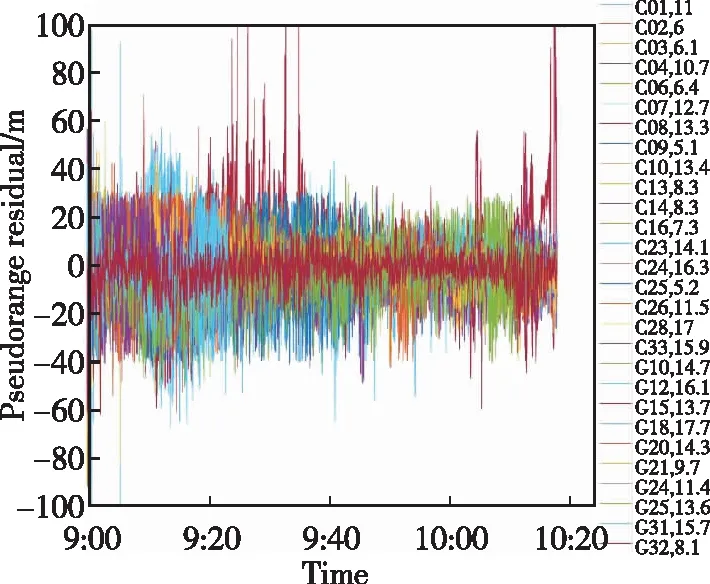
图8 小米10伪距残差Fig.8 Pseudorange residual of MI10
3 定位结果评估与分析
3.1 静态实验
本文采用最小二乘法(Least Square Method, LSM)、加权最小二乘法(Weighted Least Square, WLS)(高度角定权与信噪比定权两种模型)与Kalman滤波法分别进行伪距单点定位,并将计算结果与参考值(测地型接收机)相比较进行验证。在伪距粗差的处理中,采用Grubbs准则探测粗差。图9~图11给出了三部智能手机应用不同算法的伪距单点定位结果。

图9 华为mate30单点定位误差图Fig.9 Single point positioning error map of Huawei mate30
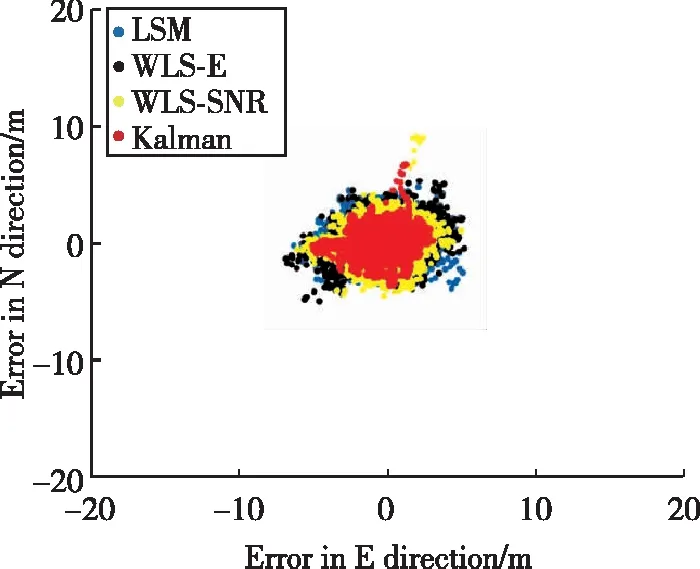
图10 荣耀 20-pro单点定位误差图Fig.10 Single point positioning error map of Honor 20-pro

图11 小米10单点定位误差图Fig.11 Single point positioning error map of MI10
从图9~图11可以看出,高度角定权与信噪比定权的定位结果偏差较大;与两种定权模型相比,Kalman滤波法的结果分布相对集中。三部智能手机的伪距单点定位平面精度RMS误差和精度改善率如表1和表2所示,三款手机通过高度角WLS、信噪比WLS和Kalman滤波法,在平面位置精度方面相较于LSM均有提升,在E、N两个方向的定位精度最大可提升28%和22%。从三部智能手机的定位结果来看,信噪比定权相对于高度角定权可使精度提升8%左右,考虑了动态模型的Kalman滤波法相对于WLS(高度角定权、信噪比定权)提升在10%左右。

表1 静态实验单点定位精度统计
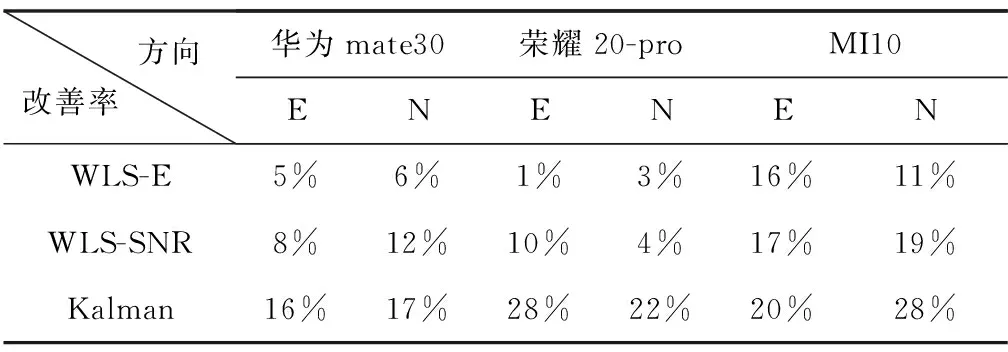
表2 比对最小二乘法各算法定位精度改善率统计
3.2 动态实验
在动态实验中,以H32专业型接收机记录的轨迹结果作为参考路线,图12~图14所示分别为三部双频手机采用不同定位算法的路线轨迹。从图12~图14可以看出,在空旷路段手机动态定位结果与接收机相近,靠近南北两侧密集树灌路段与西侧主席台及看台路段动态定位结果变差。这是由于手机天线相位中心不明确及GNSS芯片性能有限,抵抗噪声和多路径的水平较差,加上密集的树木和高耸的索膜结构主席台遮挡了大部分卫星,使卫星空间几何分布变差导致PDOP增加,引起动态定位结果大幅变差。如表3所示,本次实验中几个遮蔽区路段的定位结果与真实行走轨迹略有不同,继续采用WLS(高度角定权、信噪比定权)时,定位精度甚至不如LSM,采用动力学模型的抗差Kalman滤波后,定位结果更加平滑,定位精度提升了7.2%,更加接近实际行走路线。因此,Kalman 滤波在动态数据处理中会更合理。

表3 动态实验单点定位精度统计
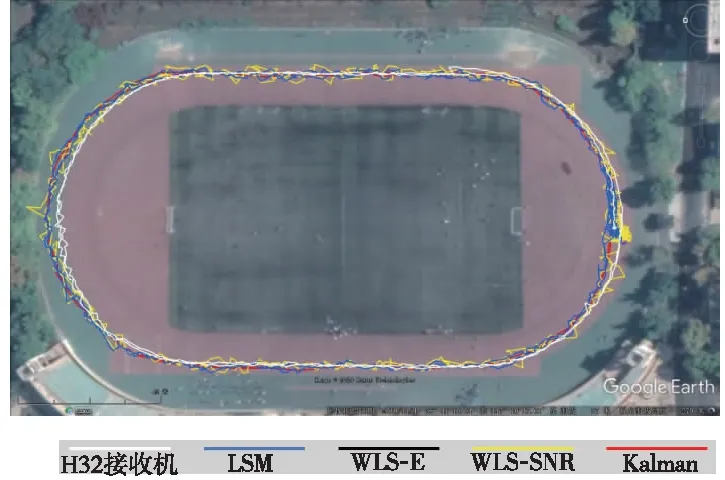
图12 华为mate30动态单点定位轨迹Fig.12 Dynamic single point positioning trajectory of Huawei mate 30

图13 荣耀20-pro动态单点定位轨迹Fig.13 Dynamic single point positioning trajectory of Honor 20-pro

图14 小米10动态单点定位轨迹Fig.14 Dynamic single point positioning trajectory of MI 10
4 结论
本文针对华为mate30、荣耀20-pro、小米10三部双频Andorid手机输出的原始GNSS观测数据,从信噪比、DOP值、伪距残差等方面对数据质量进行了分析评估,并开展了伪距单点定位静态和动态实验,对定位结果采用LSM、WLS和Kalman滤波进行处理。根据实验结果得出以下结论:
1)从数据质量来看,三部智能手机的信噪比主要集中在15~45dBHz之间,比测地型接收机整体低10dBHz左右。三部智能手机的GDOP、PDOP均低于测地型接收机,拥有较好的卫星空间几何分布。从伪距残差来看,三部手机中mate30的伪距粗差控制的最好。总的来说,mate30手机的观测数据质量是最优的。
2)从定位结果来看,静态实验中,LSM平面定位精度为3.05m,采用高度角WLS时,平面定位精度为2.80m,比LSM精度提高了8%;信噪比WLS时,平面定位精度为2.62m,比LSM提高了14%;Kalman滤波法时,平面定位精度为2.34m,相较于LSM,位置精度提高了23%。动态实验中,数据采集路段包含遮蔽区域,WLS(高度角定权、信噪比定权)的精度有时甚至低于LSM。而采用动力学模型的抗差Kalman滤波使平面精度达到了3.78m,精度提升了7.2%,因而在包含复杂场景的动态实验中,采用Kalman滤波法更为合理有效。
