极区横向地理系空间稳定型惯导算法研究
2022-02-18程建华李鹏程葛靖宇
程建华,管 行,李鹏程,葛靖宇
(哈尔滨工程大学智能科学与工程学院,哈尔滨 150001)
0 引言
北极地区不仅拥有丰富的矿产资源,还在地缘分布上具有重要的战略地位,除此之外,北极航道还具有巨大的商业价值。面对极区日益提升的经济价值以及战略意义,美、英、俄等国核潜艇已多次出入北冰洋,执行监听、侦查、巡航、演习以及训练等任务,由此可见,北极地区已经成为世界各国资源开发和军事扩张必争的战略重地。
导航定位是各类海洋运载体实现极区到达、极区航行和作战任务开展的安全保障,但是极区的磁力线收敛、极昼极夜现象和多径效应,导致传统导航方法受到严重的干扰。惯性导航系统,鉴于其自主性好、抗干扰能力强、输出导航信息完备等优点,逐渐成为潜航器极区导航的理想选择。但是,惯性导航系统受其核心惯性器件陀螺仪中随机漂移的影响,导航误差会随时间累积,因此需要潜航器定期浮出水面对惯导系统进行重调,这降低了潜航器的隐蔽性。为了提高潜航器的隐蔽性,需要更高精度的陀螺仪。静电陀螺仪是迄今为止精度最高的陀螺仪,但其不可施矩性决定了惯性导航系统只能采用空间稳定型力学编排方案。
由于空间稳定型惯导系统大多配备在核潜艇等战略武器上,所以国外将空间稳定型惯导系统列为机密技术,公开文献较少,鉴于多方面限制因素,国内惯导领域的专家学者对空间稳定型惯导系统鲜有研究。随着国内静电陀螺仪进入工程研制阶段,空间稳定型惯导系统必将成为研究热点。目前,空间稳定型惯导系统主要存在两种力学编排方案,一是以地心惯性系为导航系解算出导航信息,再将惯性系导航信息转换为对地导航信息,文献[14]和文献[16]简要推导了地心惯性系下的船用静电陀螺导航仪力学编排方案,文献[19]具体推导了地心惯性系下的系统误差方程并分析了其误差传播规律;二是以当地地理系为导航系直接解算出对地导航信息。但是,无论导航系采用地心惯性系还是当地地理系,空间稳定型惯导系统最终得到的对地导航信息在极区均存在计算溢出和误差放大等问题。
因此,为了解决上述问题,本文提出了基于CGCS2000型地球参考模型的横向地理系空间稳定型惯导系统力学编排方案,建立了误差模型,仿真验证了力学编排的正确性,并分析了算法的极区有效性,最终验证此算法克服了传统极区导航算法失效的问题。
1 系统力学编排及误差方程
1.1 伪经纬网构建与坐标系定义
如图1所示,采用CGCS2000型地球参考模型构建伪经纬网。其中,伪赤道由0°经线、180°经线圈构成,伪本初子午线由东经90°经线、西经90°经线圈构成。伪北极点(记作N′)定义为东经90°经线与赤道的交点,伪南极点(记作S′)定义为西经90°经线与赤道的交点。假设点为运载体位置,伪纬度(记作)定义为图中点法线与伪赤道平面所成的夹角,伪经度(记作)定义为图中与伪本初子午面所成的夹角。在此基础上定义横向地球、横向地理坐标系。
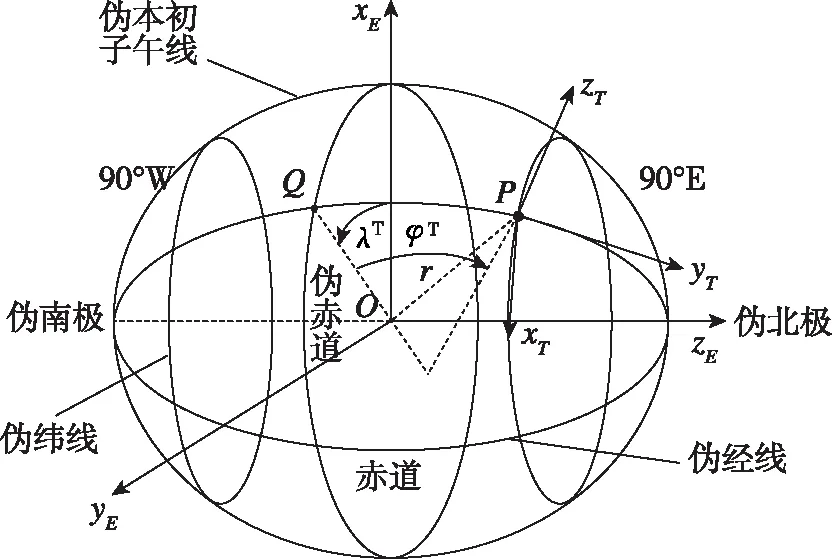
图1 伪经纬网与横向地理坐标系Fig.1 Pseudo latitude and longitude network and transverse geographic coordinate system
横向地球坐标系(记作系):原点位于地心,轴方向为地心与传统北极点连线方向,轴方向为地心与伪北极点连线方向,轴在赤道平面且与、轴构成右手坐标系。
横向地理坐标系(记作系):原点位于运载体重心,轴方向为过点与伪经线相切指向伪北极的方向,轴方向为过点与当地水平面垂直向上的方向,轴在当地水平面且与、轴构成右手坐标系。
此外,将地心惯性系记为系,将传统地球坐标系记为系,将当地地理坐标系记为系,传统地球经、纬度分别用、表示。在上述定义下,传统地理北极点转换为伪赤道上的一点,当潜航器在传统地理极区航行时,空间稳定型惯导系统将在伪赤道附近进行导航参数解算,克服了空间稳定型惯导系统在传统地理极区存在计算溢出和误差放大等问题。根据以上定义可得各坐标系间的转换关系如下:
(1)地心惯性系与当地地理系间的坐标转换
由地心惯性系向传统地球坐标系转换,可通过地心惯性系绕地球极轴旋转角度-(-)实现。由传统地球坐标系向当地地理坐标系转换,可通过以下三次坐标转动来实现
因此,地心惯性系与当地地理系间的坐标转换为
(1)
式中,=-+,为运载体初始位置经度。
(2)当地地理系与横向地理系间的坐标转换
由于当地地理系与横向地理系均为当地水平坐标系,可通过当地地理系绕轴旋转角度实现,因此,当地地理系与横向地理系间的坐标转换为

(2)
式中,旋转角度可依据以下公式求解

(3)

(4)
另外,根据转换矩阵的传递性,当地地理系与横向地理系间的坐标转换还可表示为

(5)
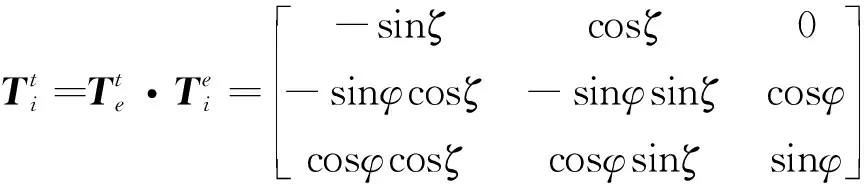
(3)地心惯性系与横向地理系间的坐标转换
根据上述坐标系间的转换关系,可推导出地心惯性系与横向地理系间的坐标转换为
(6)
式中,
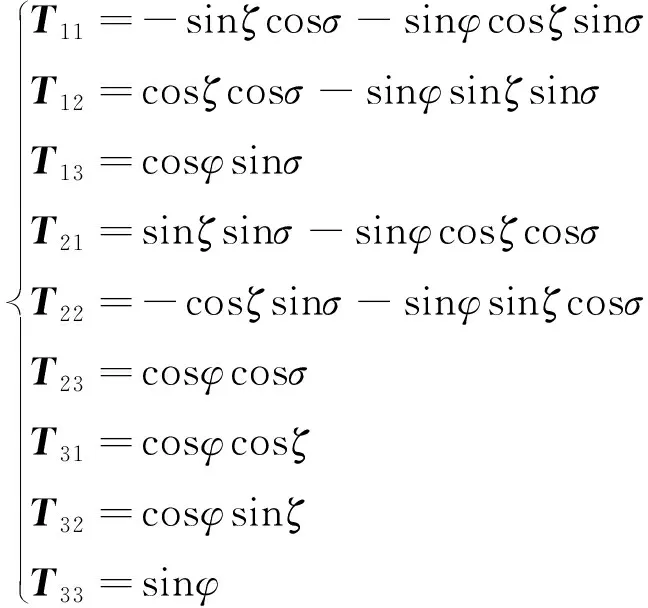
(7)
1.2 横向地理坐标系力学编排
横向地理系空间稳定型惯导系统方案,如图2所示。
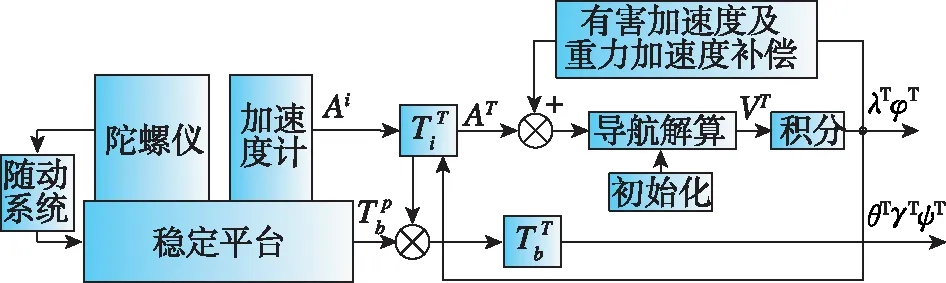
图2 横向地理系空间稳定型惯导系统Fig.2 Space-stabilized inertial navigation system based on the transverse geographic coordinate frame

(1)平台微分方程
由于稳定平台实时跟踪地心惯性系,但陀螺仪误差会造成平台坐标系与地心惯性系间产生平台失准角=[,,],因此平台微分方程为

(8)

(2)速度微分方程


(9)
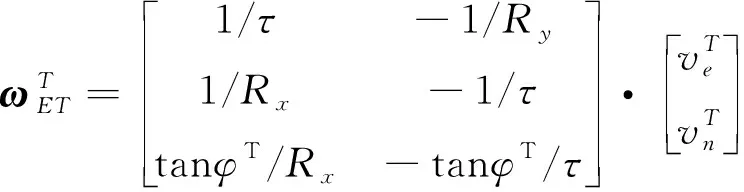
式中,

(10)
为地球自转角速度。
(11)

(12)

(13)
(14)

(15)
=(1-)(1-coscos)
(16)

(17)
(3)位置微分方程
对式(3)、式(4)两端求导并整理可得

(18)
比较式(15)、式(16)和式(18),可得

(19)

(20)
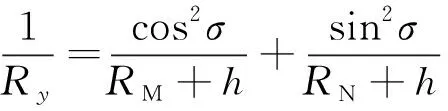
根据式(19)、式(20),可以看出横向地理系伪经度、伪纬度与伪东向速度、伪北向速度均有关,这是因为地球椭球转轴依然是传统极轴,采用横向坐标系并未改变地球椭球模型。
1.3 横向地理坐标系误差模型
为了研究横向地理系空间稳定型惯导系统导航算法的极区工作性能,以潜航器为例,考虑潜航器在极区海底定深航行运动,因此屏蔽了伪天向速度、伪高度两导航参数。

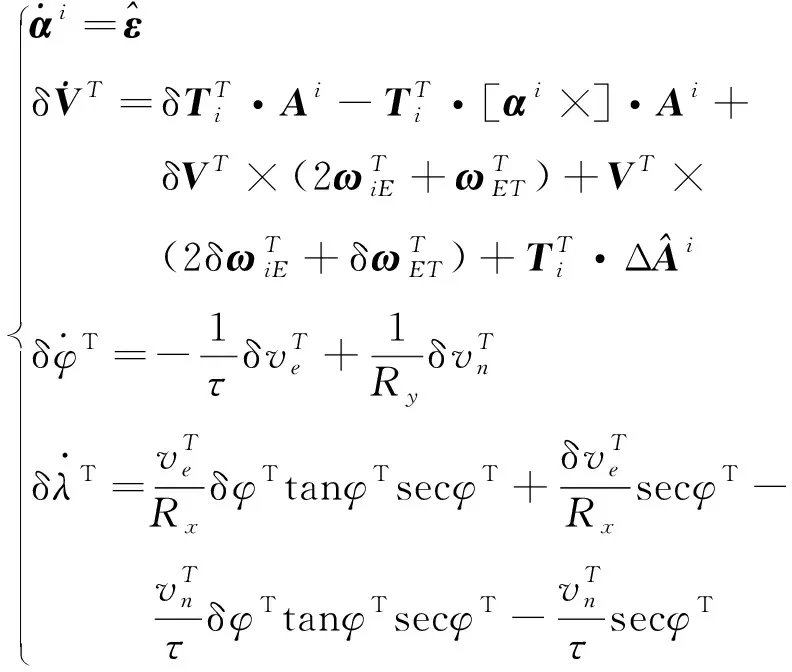
(21)
记系统的状态变量为

则横向地理系空间稳定型惯导系统的误差方程矩阵形式为

(22)
式中,为式(21)中系数组成的状态矩阵;为陀螺仪和加速度计的误差项。
2 系统仿真
为了验证横向地理系空间稳定型惯导系统导航算法的极区有效性,需要开展仿真验证,包括中纬度区域仿真验证系统力学编排的正确性、极点附近区域仿真分析算法的优越性、穿越极点区域仿真分析算法的适用性。
2.1 系统力学编排仿真验证
无论惯性导航系统采用何种导航坐标系解算导航信息,只要将误差模型转换到同一坐标系下,都具有相同的方程,这就是误差模型的等价性,具体体现在误差方程的齐次部分完全相同。为验证本文算法的正确性,以潜航器为例,选取当地地理系和横向地理系均适用的区域,设定惯性器件误差为零,采用轨迹发生器模拟潜航器海底定深航行并实时生成惯性器件输出,通过横向地理系空间稳定型惯导系统力学编排解算出伪姿态误差、伪速度误差和伪经纬度误差。最后,将横向地理系导航参数误差转换到当地地理系,并与导航系为当地地理系下解算的导航参数误差进行比较,若两种导航系下的误差相同,则可验证横向地理系空间稳定型惯导系统力学编排的正确性。
仿真条件设置如下:陀螺仪常值漂移为0,加速度计常值零偏为0;运载体初始位置为[38°N,121°E];初始速度为[0m/s,5m/s,0m/s];姿态角分别为:纵摇角()=3°sin(2π/8),横摇角()=4°sin(2π/10),航向角()=5°sin(2π/6+45°);仿真时间为30h。仿真结果如图3所示。
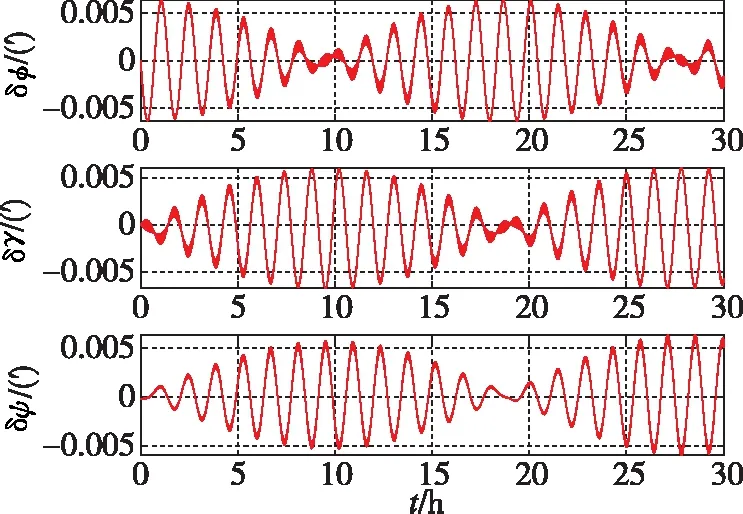
(a)当地地理系姿态角误差的差值
图3为空间稳定型惯导系统在横向地理系解算的导航误差转换到当地地理系与当地地理系直接解算的导航误差的差值。由仿真结果可知,两种导航系下的导航参数误差差值很小,姿态角误差差值小于0.006′,速度误差差值小于0.03m/s,经纬度误差差值小于0.01′,此误差差值是由于动基座仿真条件下姿态角解算中不可交换误差引起;若潜航器在仿真过程中无姿态角变化,则仿真结果中上述误差差值均为0。
仿真结果验证:横向地理系空间稳定型惯导系统力学编排是正确的。
2.2 系统极区有效性仿真分析
本节以潜航器为例,通过对极点附近区域和穿越极点区域分别仿真分析惯性器件误差对系统极区工作性能的影响,进而分析系统的极区有效性。
2.2.1 极点附近区域仿真结果对比分析
为了分析横向地理系编排方案的极区导航性能,与当地地理系编排方案对比,对横向地理系编排方案在极点附近区域进行动基座仿真。

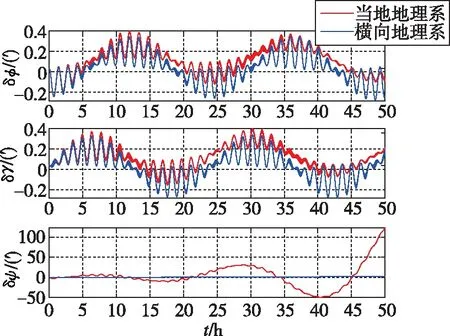
(a)当地地理系与横向地理系姿态角误差
根据仿真结果可知,在陀螺仪、加速度计误差影响下:1)当地地理系编排方案解算的纵摇角、横摇角误差小于0.4′,航向角误差小于120′;东向、北向速度误差小于0.8m/s;纬度误差小于4′,经度误差小于120′。2)横向地理系编排方案解算的伪纵摇角、伪横摇角误差小于0.3′,伪航向角误差小于3′;伪东向、伪北向速度误差小于0.9m/s:伪经纬度误差小于4′。综上,运载体在极点附近区域航行时,两者间的纵摇角误差、横摇角误差、速度误差、纬度误差相差较小,但是横向地理系编排方案解算的航向角和经度精度远优于当地地理系编排方案,因此说明基于横向地理系编排的空间稳定型惯导算法克服了极区导航误差放大的难题,可以保障潜航器安全航行。
2.2.2 穿越极点导航适用性仿真分析
为了分析横向地理系编排方案在穿越极点区域的极区适用性,运载体运动轨迹设置为:运载体起始点地理经纬度为[88°N,121°E](伪经纬度为[1.714°N′,-1.03°E′]),运载体以5m/s的速度沿121°经线向传统极点航行,大约航行12.4h后穿越传统极点,航行终点的地理经纬度为[83.942°N,59°W](伪经纬度为[-5.19°N′,3.129°E′])。


(a)横向地理系姿态角误差
根据仿真结果可知,在陀螺仪、加速度计误差影响下:1)穿越极点过程中各导航参数误差曲线较为平滑,未出现误差跳变现象;2)系统解算的伪纵摇角、伪横摇角误差小于0.3′,伪航向角误差小于3′;伪东向、伪北向速度误差小于1m/s;伪经纬度误差小于4.2′。综上,横向地理系空间稳定型惯导系统导航算法在极点处不存在力学编排缺陷,说明该算法适用于极区导航。
3 结论
本文针对空间稳定型惯导系统导航算法在极区导航失效的问题,提出了横向地理系空间稳定型惯导系统导航算法,并对仿真结果分析可知:
1)在中纬度地区,空间稳定型惯导系统在横向地理系解算的导航误差转换到当地地理系与当地地理系直接解算的导航参数误差的差值很小,其中姿态角误差的差值小于0.006′,速度误差的差值小于0.03m/s,经纬度误差的差值小于0.01′,验证了横向地理系空间稳定型惯导系统力学编排的正确性。
2)在极点附近区域,通过对比当地地理系、横向地理系编排方案的导航仿真结果,验证了横向地理系空间稳定型惯导系统导航算法的极区优越性。
3)在穿越极点区域,系统解算的伪纵摇角、伪横摇角误差小于0.3′;伪航向角误差小于3′;伪东向、北向速度误差小于1m/s;伪经纬度误差小于4.2′。说明了横向地理系空间稳定型惯导系统导航算法在极点处的适用性,从而验证了该算法在极区导航的有效性。
为建设与此算法相匹配的极区水下导航体系,以满足潜航器极区航行安全的需求,绘制极区航海图己成为极区导航亟待解决的重要问题之一。
