阵列MEMS测斜仪高精度误差补偿方法研究
2022-02-12李中国蔡德钩赵勇刘文武
李中国 蔡德钩 赵勇 刘文武
中国铁道科学研究院集团有限公司铁道建筑研究所,北京 100081
边坡失稳造成了严重的自然灾害和经济损失,除地震和暴雨等自然原因引起边坡失稳,人为活动也可以引发边坡失稳,产生安全隐患。铁路、公路高路堑边坡及水库边坡有潜在失稳风险的施工过程及后期工程运营期间,需要进行地层深部变形监测。对于地层深部变形监测使用最成熟、最广泛的就是测斜仪。
MEMS测斜仪具有仪器成本低、精度高、操作简单,可实现实时连续变形与振动数据采集的优点,广泛应用于地质、航空、航天、航海、工业制造等行业[1-2]。但该传感器也存在随时间漂移较大、受温度变化影响明显[3]、校准复杂、标定困难等问题,影响了测斜结果的精度和稳定性。为保证高精度响应和输出要求,对传感器校准是必需的步骤[4-7]。阵列式MEMS测斜仪的核心是加速度计,由于制造和安装过程会产生零偏、标度因数、非正交等问题,出厂校准保证精度通常较低。针对岩土工程中问题,监测周期通常持续较长,加速度计长期累积姿态误差,对输出结果产生较大影响,基础校准不能满足对工程变形监测的精度要求。对此,国内外相关领域学者对基于MEMS的三轴加速度计精度补偿算法进行了研究。现有的精度补偿方法基本为仪器辅助校准的特殊位置校准法[8-9],但需要额外的高精密仪器辅助,步骤繁琐且成本较高。
本文对多阵列测斜仪系统进行数学建模,分析误差成分,分别进行补偿,使用椭球补偿算法来消除零偏误差[10]、标度因数误差,通过平面旋转法消除非正交误差,通过滤波法消除噪声干扰[11],实现多阵列测斜仪高精度补偿。
1基于MEMS的测斜仪系统
1.1 系统构成
基于MEMS的测斜仪系统主要包括MEMS测斜仪、系统软件、服务器等。MEMS测斜仪由传感器、保护外壳、通讯电路等部分组成,主要用来采集信号。系统软件包括校准软件、预警软件、可视化软件。其中校准软件用来对测斜仪进行校准,提高系统精确度。预警软件可用户自定义规则,对不稳定坡体进行监测、报警。可视化软件用于结果的记录、显示及数据分析。基于MEMS阵列式测斜仪见图1。

图1 基于MEMES阵列式测斜仪
1.2 系统原理
测斜仪原理是将三个加速度计两两正交安装,组成正交坐标系,当测斜仪位姿发生变化时,三轴加速度计数值产生相应变化,通过输出的三个加速度计值来计算倾角和位姿,多阵列倾角和位移累加获取测斜仪环境变化。在测斜仪系统数学表示中,加速度计输出与重力存在三角函数关系。测斜仪原理见图2。
2 系统误差分析
测斜仪在安装的时候,三轴传感器无法达到完美正交,传感器坐标系和整体坐标系不重合,会产生非正交误差。此外,三轴传感器本身易受到温度环境条件影响,存在零偏误差和标度因数误差,对精度影响较大。理想条件下是三轴传感器任意一轴无零偏,且标度因数一致,不同两轴传感器之间正交,整个传感器坐标系和测斜仪坐标系三轴完全重合。
综上,测斜仪系统误差来源有非正交误差、零偏误差、标度因数误差和噪声。数学模型表示为
式中:Et为最终精度补偿系数;Do为实际输出;En为非正交误差;Ez为零偏;Es为标度因数误差;Dor为原始数据;b为噪声。
2.1 误差模型
1)零偏误差
因测斜仪本身制造缺陷,以及模拟电路中数字与模拟信号之间转化损失,使输出矢量的坐标零点发生偏移所产生的误差是零偏误差。在数学模型中为坐标零点发生偏移,实际坐标轴中原点对称位置在原始输出坐标轴上不对称。针对该误差可通过对各坐标轴进行位移归零从而进行补偿。设三轴为x、y、z,具体数学补偿模型为

式中:(R x1,R y1,R z1)T为各轴消除零偏后输出结果;(R x,R y,R z)T为三轴加速度计显示零点;(θx,θy,θz)T为零偏位移。
2)标度因数误差
MEMS器件在归一化零偏后,输出结果在实际相同位移条件下,不同轴间加速度计无法保证输出数值相同,即测斜仪各轴标度因数不同,需要统一标度因数,使各轴输出值处于相同尺度,减小位移尺度变换误差。标度因数误差是由各轴传感器灵敏度不同造成的,又称为灵敏度误差。在数学模型上表现为各轴传感器沿坐标轴可测量最大矢量长度不同,需要乘以对应标度因数。补偿模型为
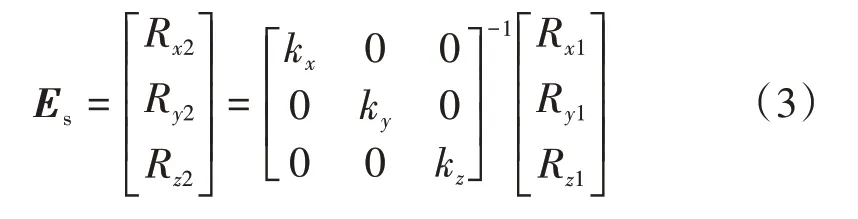
式中:(R x2,R y2,R z2)T为消除标度因数误差后输出矩阵;kx、ky、kz为标度因数校准矩阵参数。
3)正交误差
测斜仪由三个两两正交的加速度计传感器组成,在制造和安装的时候,无法完全保证两两完全正交,存在微小夹角,影响输出结果,产生正交误差。如图3所示,设原始坐标系为O⁃x′y′z′,校准后三轴坐标系为O⁃x yz,两坐标系之间夹角分别为α、β、μ。因x、y、z三轴间不完全正交,夹角影响最终检测输出结果。对非正交误差进行校准,就需将O⁃x′y′z′坐标系通过旋转,划归成图中两两正交的坐标系O⁃xyz上。

图3 非正交误差示意
根据误差计算公式,在零偏、标度因素校准后,将夹角转换为矩阵运算可得正交误差补偿矩阵为
式中:(R x3,R y3,R z3)T为消除正交误差后输出结果;α、β、μ为对应轴间夹角。
因非正交偏移角α、β、μ角度较小,且通过正交性补偿校准,α、β、μ不断向零角度逼近。此时对应正余弦值可近似看作:
化简模型为

4)噪声误差
现实世界非理想世界,任何系统都存在噪声误差,噪声服从高斯分布,使用滤波算法对原始数据进行过滤,排除噪声干扰,可很好地提升测量精度。
2.2 测量精度补偿算法
1)椭球补偿算法
根据数学模型分析可得,在重力场稳定的条件下,测斜仪在任何姿态下的三轴加速度值应满足

式中:gx、gy、gz为各轴所得加速度值;kc为与当地重力场相关的一个常数。
三轴加速度数据集在三维坐标下应为一球体,但由于测斜仪存在零偏误差和标度因数误差,球体的半径和圆心都发生变化,使球心发生偏移,半径拉伸或者缩短,最终显示出的图像应为椭圆球体。椭圆球面的标准数学表示是

式中:θx、θy、θz为相应坐标轴的零偏;A、B、C的倒数为对应相应坐标轴的灵敏度误差幅度。
通过标定试验得到椭球曲面六个以上的三维点集,可估计出椭球的参数,从而转化为通过点集求拟合曲面参数的问题。最常见的方法就是最小二乘法,数学模型表示为

式中:Fi(x,y,z)为i点的椭球一般式;N为椭球曲面上点数,N≥6;a、b、c、m、n、p为计算参数;τ为三维坐标数据点集样本;D为正交矩阵。
式(8)相当于求解六元一次方程组,解出相应a、b、c、m、n、p就可算出相应零偏和灵敏度误差。
2)非正交误差补偿
在恒温转台中,放置待测测斜仪,由于非正交误差较小,分别以待测轴为目标,慢慢移动待测轴,使之与重力轴重合,即局部输出极值点,此时待测轴与相应坐标轴之间的夹角即为非正交误差角。同理可得其他两夹角,求得整体偏角和补偿矩阵。
3)Kalman滤波
Kalman滤波是通过递归保证误差协方差最小实现的最优线性估计算法,具有计算量级小、实时性能高的优势,可通过一系列带有误差的参数来预测真实值,在保证高精度的条件下,同时具有稳定性和实时性,可有效去除高斯噪声影响。Kalman滤波的状态方程和测量方程分别为

式中:K为状态变化矩阵;H为实际测量矩阵;w t-1和v t为服从正态分布的噪声。
Kalman滤波是递推算法,其核心为五个递推公式。首先通过状态方程和测量方程向前推算出状态变量x̂t|t-1(t为对应时间)和误差协方差P t|t-1,即

式中:P t-1为t-2时刻的协方差预测结果;Q为w t-1对应的协方差。
再计算卡尔曼增益,更新权重G为

然后更新状态位置方程为

更新状态向量协方差方程为

式中:I为单位矩阵。
原始数据经过Kalman滤波处理后,可使其输入值更接近真实值,减少噪声误差,提高补偿精度。
4)校准流程
根据上述精度补偿过程,设计精度补偿算法流程如图4所示。
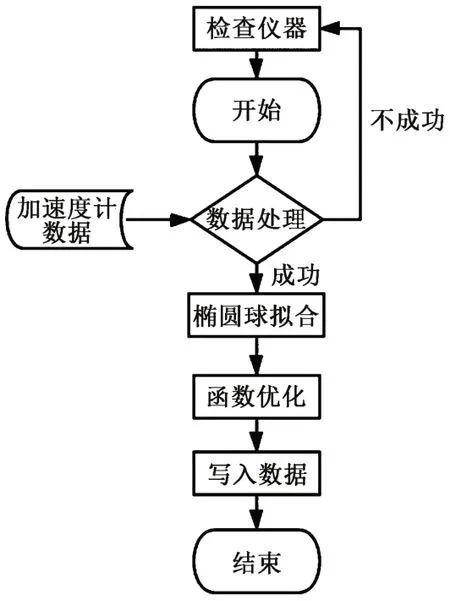
图4 设计精度补偿算法流程
3 校准结果
为验证本文校准方法的有效性,设计试验进行对比验证。
1)获取原始数据
获取原始MEMS输出值,分别绕x、y、z三轴,在三轴加速度从-g到g的变化区间中,取样过程按照每间隔一定角度进行统计,在各位置下取30 s内的三轴加速度计静置值平均值作为原始MEMS输出值。
2)六位置标定
在三坐标轴分别为-g和g加速度时,自由组合,可得六个特殊位置,在每一特殊位置,取30 s内的三轴加速度计静置值平均值,作为六位置标定法输入值,计算得变换矩阵Etr和偏移,见式(14),通过计算得出校准后输出。

3)本文算法标定
在三轴转台上分别绕x、y、z三轴转动,在三轴加速度从-g到g的变化区间中,每当转动到某一位置时,取30 s内的三轴加速度计静置值平均值,进行Kalman滤波,将滤波后数据代入椭球算法中,求出变换矩阵和偏移,如式(15)所示。代入矩阵和偏移算出算法标定后输出。
4)对比结果
各算法校准前后倾角对比见表1,其中AH为MEMS测斜仪水平倾角,AV为MEMS测斜仪方位角。
由表1可知:在校准之前,倾角误差、方位角误差可达2°~3°,特殊位置校准算法的倾角精度为±0.1°、方位角补偿精度在1°之内,分辨力精度可达0.01 mm。本文椭球曲面拟合算法校准精度倾角精度为:稳定在±0.1°,方位角精度在0.2°之内,分辨力精度达到0.002 mm,且满足MEMS测斜仪精度要求,不依赖额外物理器件,能减少标定成本。
4 结论
本文通过建立数学模型,统筹分析MEMS测斜仪的误差模型,将不同误差函数进行联合补偿,减少不同误差间的耦合影响,分离出各参数,提高了误差的最终补偿精度,取得了良好的校准效果。使用本文提出的校准算法和特殊位置校准算法分别对测斜仪进行了试验测试。使用本文算法进行误差校准后,误差结果稳定,精度稳定在0.2°之内,分辨力精度可达0.002 mm,效果和仪器校准相符,可替代仪器进行校准,满足测斜仪校准需求。整个测量系统运行准确,可实时监控测斜仪环境形变,满足高精度边坡失稳监测需求,适用于路基监测、地质作业等多种场景。