Strong observability as a sufficient condition for non-singularity and lossless convexification in optimal control with mixed constraints
2022-02-11SherilKunhippurayilMatthewHarris
Sheril Kunhippurayil·Matthew W. Harris
Received:30 April 2022/Revised:2 August 2022/Accepted:8 August 2022/Published online:13 October 2022
©The Author(s),under exclusive licence to South China University of Technology and Academy of Mathematics and Systems Science,Chinese Academy of Sciences 2022
Abstract This paper analyzes optimal control problems with linear time-varying dynamics defined on a smooth manifold in addition to mixed constraints and pure control constraints. The main contribution is the identification of sufficient conditions for the optimal controls to be non-singular,which enables exact(or lossless)convex relaxations of the control constraints.The problem is analyzed in a geometric framework using a recent maximum principle on manifolds,and it is shown that strong observability of the dual system on the cotangent space is the key condition.Two minimum time problems are analyzed and solved. A minimum fuel planetary descent problem is then analyzed and relaxed to a convex form. Convexity enables its efficient solution in less than one second without any initial guess.
Keywords Optimal control·Strong observability·Lossless convexification
1 Introduction
This paper analyzes a class of finite horizon optimal control problems with linear time-varying dynamics defined on a smooth manifold in addition to mixed constraints (constraints involving both the state and control)and pure control constraints.The main contribution of the paper is the identification of sufficient conditions for the optimal control to be non-singular,by which it is meant that the necessary conditions uniquely specify that the optimal control is on the boundary of its constraint set.It is shown that the conditions are related to strong observability of the dual system on the cotangent space. By duality, the conditions are also related to strong controllability of the system on the manifold.
The work is motivated broadly by the numerous engineering problems that naturally evolve on a manifold and/or have mixed constraints. Common application areas include robotics [1,2] and trajectory planning/control of aerospace vehicles [3,4]. Relevant examples with linear dynamics include planetary descent[5,6],formation flying in low earth orbit[7,8],and rendezvous and proximity operations[9,10].
The work is motivated more specifically by the challenge of proving that singular arcs do not exist and the computational benefits that arise in their absence. Along a singular arc,the standard necessary conditions do not determine the optimal control directly and computational algorithms may struggle(by yielding a chattering control,for example).For these reasons, higher-order necessary conditions have been developed[11]along with specialized algorithms[12].In the absence of singular arcs,it is common for the optimal control to evolve in a subset of the control space (on the boundary or at the extreme points).This simplifies the control design and actuation required[13,Ch.4].
Non-singularity and its connection with controllability/observability is evident in the seminal work by Pontryagin and his colleagues [14, Ch.3]. For time-optimal problems,they used normality(a controllability-like concept)to show when controls are on the boundary of a parallelepiped constraint. Analogous results are known for other problems without mixed constraints such as the minimum fuel problem[15,Ch.6].The same concept has been extended to more general problems in the Mayer form[13,Ch.6]and to construct convex relaxations for disconnected control constraint sets[16,17].
Non-singularity is related to the existence of lossless convexifications wherein non-convex constraints are relaxed to a convex form and then shown to not introduce additional solutions. The relaxations serve an important role in realtime control because 1) non-convex programs are difficult to solve,2)nonlinear programming techniques do not offer convergenceguarantees,and3)powerfulinterior-pointmethods[18–20]and customized solvers[21]enable the efficient solution of convex programs with guarantees. As a result,convex relaxation techniques have gained interest over the past decade and have apparently been used by SpaceX[22].
Lossless convexification was first introduced in the optimal control context in 2007 for fuel optimal planetary landing[23]. An accurate model of the guidance problem required that the net thrust magnitude be bounded between a non-zero minimum and maximum resulting in a non-convex annular control constraint. Their relaxation required lifting the control space and ruling out singular arcs using a controllability/observability condition.The idea was later extended to different classes of annularly constrained problems:linear systems[24,25],nonlinear systems[26],and linear problems with specialized state constraints[27–29].This paper aims to further extend these results by considering time-varying systems that evolve on a manifold(other than Rn)with generic control constraints.Doing so again requires lifting the control space.Now the condition is one based on strong controllability/observability and is directly tied to the manifold on which the system evolves.This advancement is enabled by a recent statement of a maximum principle on manifolds with mixed constraints[30].
The use of strong observability in optimal control is novel. Strong observability is typically used in standard estimation-type applications in which an observer must also be constructed. Beyond tests and observers for linear timeinvariant systems, a number of extensions have been made recently for systems with non-differentiable inputs [31],time-varying systems without feedthrough [32], discretetime systems[33],singular systems[34–36],hybrid systems[37],and nonlinear systems[38].Many of these aim to extend the basic observability rank test; hence, they are binary in nature (full rank or not). Continuous measures of strong observability also exist that give the distance to the closest non-strongly observable system [39], and these have been applied to linear time-invariant systems with specialized algorithms [40]. In estimation-type applications, the construction of practical observers is important. In the optimal control setting,however,it is not a problem for the observer to depend on higher order derivatives. These derivates are known analytically from the dual system and do not have to be measured.
1.1 Outline
The organization of the paper is now given along with its contributions. Section 2 introduces the mathematical notation.Section 3 describes the primary problem of interest, which is an optimal control problem on a manifold with additional mixed constraints and control constraints.This section also includes the assumptions imposed on the problem and a geometric motivation for the current work. Section 4 presents a specialized version of the maximum principle on manifolds and some linear systems theory. The main result is presented in Sect.5,which states the sufficient conditions for non-singularity.A time-invariant minimum time problem is solved in Sect.6.A time-varying minimum time problem is solved in Sect.7.Section 8 uses the main result to construct a lossless convexification for the constrained planetary descent problem.Section 9 concludes the paper.
2 Mathematical notation
The interior of a setSis int(S).The boundary of a setSis∂S.The extreme points of a setSare ex(S).A condition is said to hold almost everywhere if the set on which it fails has zero Lebesgue measure.A functionxthat is zero everywhere on its domain is denotedx≡0. Consider functions with domainXand codomainY. The set of continuously differentiable functions isC1(X,Y). The set of piecewise continuously differentiable functions is(X,Y). The set of piecewise continuous functions isCp(X,Y). The set of essentially bounded measurable functions isL∞(X,Y).The image of a linear mapA:X→Yis the subspace imA= {Ax|x∈X}. The inverse image ofV⊂Yis the subspaceA−1V= {x∈X|Ax∈V}.Given a manifoldM,the tangent space at pointxisTx M.The cotangent space atxisT∗x M. The tangent bundle isT M. The cotangent bundle isT∗M.The gradient of a functiong: Rp→Rqwith respect toxis denoted ∇xg: Rp→Rp×q.Ap-by-qzero matrix is denoted 0p×q. Ap-by-pidentity matrix isIp×p.Given a vectorx∈Rp,diag{x}is thep-by-pdiagonal matrix with elements ofxon the diagonal.A function with multiple arguments such asf(t,x(t),u(t))may be shortened tof[t].
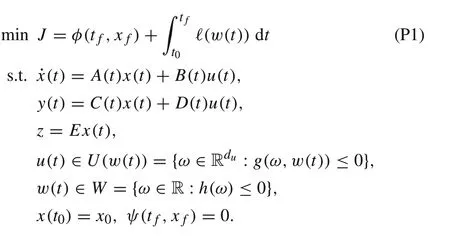
3 Problem description
In this section, we introduce the primary problem of interest,which is an optimal control problem defined on a smooth manifoldMsubject to a mixed constraint and additional control constraints.It is labeled P0.

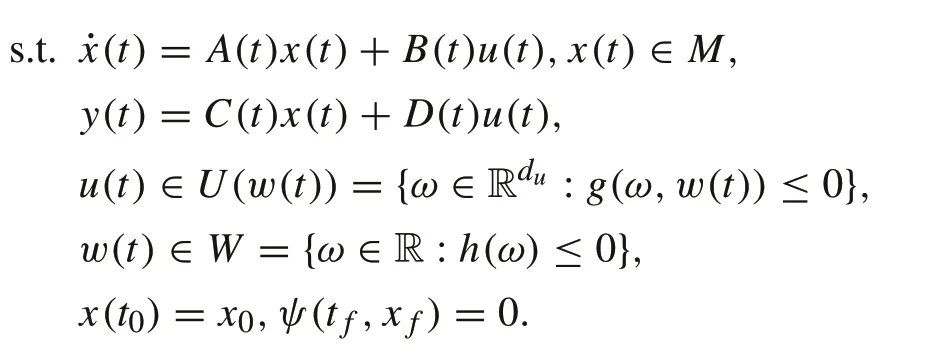
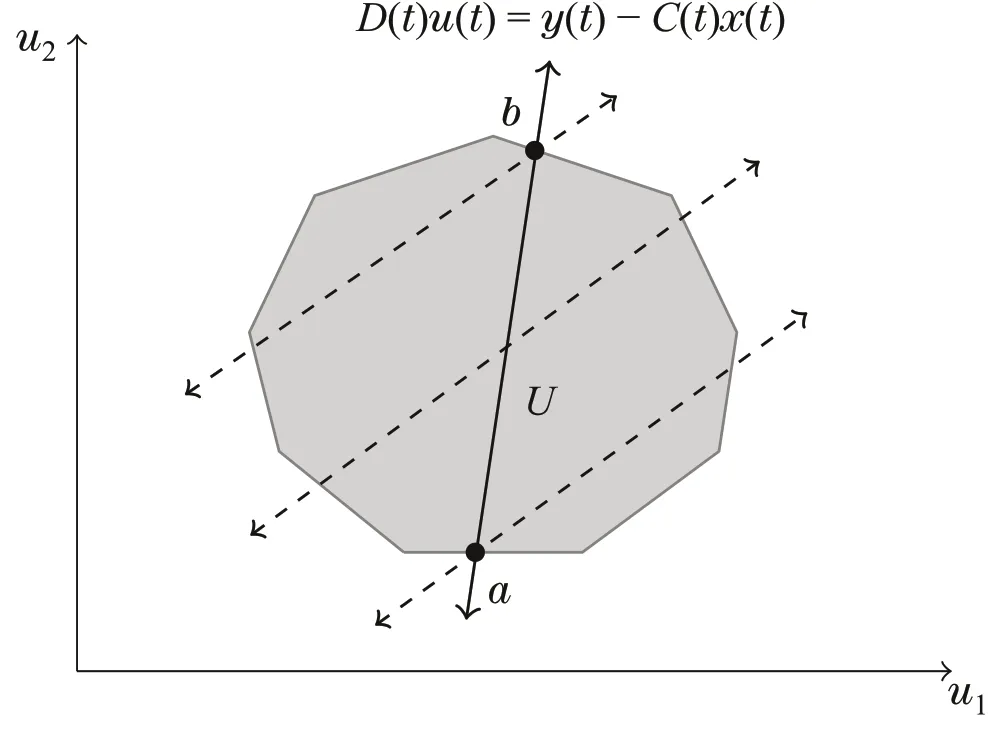
Fig. 1 The admissible set of controls is the line segment ab. The dashed lines indicate lines of constant cost for the pointwise objective λT(t)B(t)u(t)
Descriptions and functional specifications for the problem data are below.
• The fixed initial time ist0.The free final time ist f.The time domain isI=[t0,t f].
• The statex∈(I,Rdx)evolves on the smooth manifoldM⊂Rdx.The state at the initial timex(t0)is fixed atx0.The state at the final timex(t f)is denotedx f.
• The control functions areu∈Cp(I,Rdu) andw∈Cp(I,R).The vector-valued controluis pointwise constrained to the setU(w(t)). This set is functionally specified byg∈C1(Rdu×R,Rdg). The scalar controlwis pointwise constrained to the setW.This set is functionally specified byh∈C1(R,Rdh).Thoughwdoes not appear in the dynamics or mixed-constraint,it appears in the objective functionℓand it parameterizes the setU.Its presence enables one to construct the lossless convexification shown in Sect.8.
• The system matrices areA∈C1(I,Rdx×dx) andB∈C1(I,Rdx×du).The resulting differential equations mapI×M×U→T Msuchthatthestateevolvesintrinsically onM.
• The functionsy∈C1(I,Rdy),C∈C1(I,Rdy×dx),andD∈C1(I,Rdy×du)form the mixed constraint.
• The integral objective isℓ∈C1(R,R). The terminal objective isφ∈C1(R×Rdx,R).The terminal constraint isψ∈C1(R×Rdx,Rdψ).
A special case of this problem has a minimum time objective, dynamics in Rdx, no mixed constraint, and a bounded control of the formuTu≤1.This special case has been studiedextensively,anditiswellknownthatasufficientcondition for the control to be on the boundary of the control set is controllability[41,Ch.2].The primary purpose of this paper is to generalize this sufficient condition so it applies to P0.The challenge in doing so can be described geometrically.
Consideraminimumtimeproblemwithatwo-dimensional control and one-dimensional mixed constraint. At a given instant of time,supposeU(w(t))is the polyhedral set shown in Fig.1.The mixed constraintD(t)u(t)=y(t)−C(t)x(t)appears as a solid, dark line. The line can translate and/or rotate with time. At this time, the admissible control set is the line segment.
For minimum time problems with mixed constraints,the maximum principle requires the optimal control to maximize
the Hamiltonian over the admissible control set[30,Ch.1].

In Fig. 1, the optimal point will be ataorbprovided the cost contours are not parallel to.If the contours are parallel tothe optimal point could be anywhere alongand hence possibly in the interior ofU(w(t)). Because the contours of constant cost depend onλand because the mixed constraint depends onx,neither of which are known a priori,it is not obvious what conditions if any ensure they will not be parallel.This is the research challenge;it is answered in Theorem 2, which requires strong observability of the dual system. The strong observability condition generalizes the controllability condition for problems without mixed constraints in the sense that it simplifies to it in the absence of the mixed constraint.
To show that the control is always at an extreme point,the line segmentmust always pass through an extreme point ofU(w(t)).For polyhedralU(w(t)),this means that the line segment cannot move, i.e.,y−Cxmust remain constant over the whole trajectory.This assumption is too strong for the applications in mind and not explored further.
4 Background
Background material on strong observability of linear systems and the necessary conditions for optimality of P0 are now given.
4.1 Strong observability
We begin by considering the linear system

This is the same system that appears in P0,and it is denotedΣ=(A,B,C,D).
Definition 1[36] A systemΣis strongly observable if for every inputusuch that the outputy≡0,y≡0 impliesx≡0.
For linear time-invariant(LTI)systems,the strong observability property may be characterized in terms of the weakly unobservable subspace.
Definition 2[42] SupposeΣis time-invariant. A pointx0is weakly unobservable if there exists an input functionusuch thaty≡0.The set of all weakly unobservable points is called the weakly unobservable subspaceV(Σ).
It follows from the definitions that an LTI systemΣis strongly observable if and only if the weakly unobservable subspace is trivial,i.e.,V(Σ)=0.The weakly unobservable subspace may be computed using the following recurrence relation[42]:

It is guaranteed that there exists ak≤dxsuch thatVk=Vk+1=V(Σ). Thus, the weakly unobservable subspace is computable in no more thandxsteps.
The strong observability condition can be weakened slightly by only requiring it on a subsetSof Rdx.
Definition 3LetS⊂Rdx.AsystemΣisstronglyobservable onSif for every inputusuch that the outputy≡0,y≡0 impliesx(t)=0 orx(t)/∈Severywhere.
Corollary 1Let S⊂Rdx.Suppose Σ is time-invariant.Σ is strongly observable on S if and only if V(Σ)∩S=0.
For linear time-varying(LTV)systems,a necessary and sufficient condition for strong observability has also been given onRdx[36].Thisconditionreliesuponseveralmatrixdecompositions and application of a matrix rank test. A subspace condition analogous toV(Σ)∩S=0 is not currently available in the literature for LTV systems. For this reason, we now give a sufficient condition for time-varying systems to be“effectively time-invariant”.
Proposition 1Let S⊂ Rdx.If the LTI system¯Σ=( ¯A, ¯B, ¯C, ¯D)is strongly observable on S and there exists a map F∈C1(I,Rdu×dx)such that

then the LTV system Σ=(A,B,C,D)is strongly observable on S.
ProofSuppose that ¯Σis strongly observable onS, equation (4) holds, andΣis not strongly observable onS. By Definition 3,there exist state and control functionsxandusatisfying the system equations

along with at least one timeτsuch thatx(τ)/=0 andx(τ)∈S.Rearranging the system equations gives

Introducing the functionvgiven byv(t)=u(t)+F(t)x(t),eq.(6)becomes

Equation(7)defines ¯Σ,which was assumed strongly observable onS. It follows from Definition 3 thatx(t) = 0 orx(t)/∈Severywhere, which contradicts the existence of a pointτat whichx(τ)/=0 andx(τ)∈S. ■
Corollary 2Let S⊂Rdx.Consider an LTI system¯Σ and an LTV system Σ satisfying equation(4).If V( ¯Σ)∩S=0,then Σ is strongly observable on S.
Corollaries 1 and 2 provide practical tests for strong observability on a set. They are used in the examples provided in Sects.6,7,and 8.
4.2 Optimal control
Problem P0 is a non-standard optimal control problem because of the mixed constraints and manifold. The requisite necessary conditions are provided by Bonalli[30,Ch.1]under a regularity assumption.Assumption 1 (Linear independence constraint qualification) The matrix
is full column rank almost everywhere when evaluated along the optimal trajectory.
The assumption requires calculating gradients along the optimal trajectory.In general,its verification requires inspection of the optimal solution.In the linear case,the gradients are independent of the optimal solution and verification is possible a priori.
The Hamiltonian function for P0 is given by

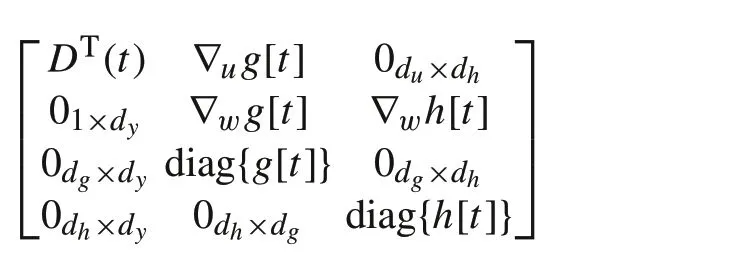
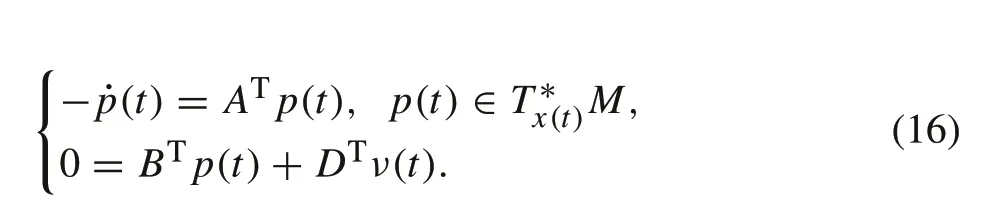
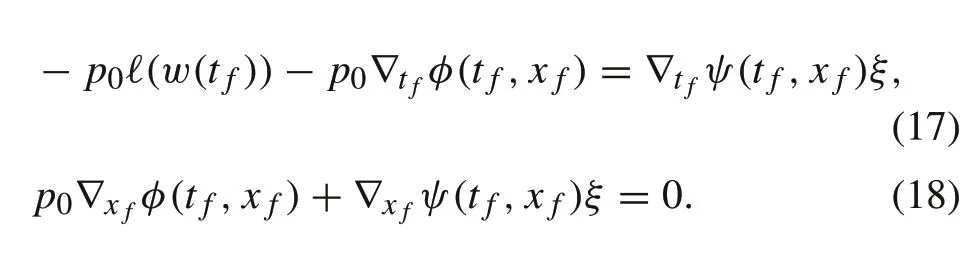
Theorem 1(Necessary conditions for optimality of P0)Let(x,u,w)be an optimal solution ofP0.Under Assumption 1,there exist a constant p0∈{0,−1},a vector ξ∈Rdψ,an absolutely continuous function p:I→T∗M for which p(t) ∈T∗x(t)M,a bounded function ν∈L∞(I,Rdy),and a bounded,non-positive function μ∈L∞(I,Rdg)such that(p0,p(t))is never zero and the following hold almost everywhere:
ProofThe theorem is obtained by specializing Theorem 1.4 in[30,Ch.1]to P0.A similar theorem withM= Rdxis in[43,Ch.5]. ■
The scalarp0is called the abnormal multiplier.Optimal solutions withp0=0 are abnormal.Optimal solutions withp0= −1 are normal. The condition that(p0,p(t)) never be zero is called the non-triviality condition.Equation(9)is the dual system.Equation(10)is the stationarity condition,which is related to the maximum condition for classical optimal control problems without state constraints.Equation(11)is the complementarity condition.Equations(12)and(13)are the transversality conditions.
Implicit in the statement of necessary conditions is the existence of an optimal solution. The example problems solved in Sects. 6, 7, and 8 have lower bounded, linear objective functions,linear dynamics,fixed final points,and compact,convex control sets.When a feasible control exists,Theorem 5.6.1 of [13, Ch.5] guarantees the existence of a measurable optimal control. Other existence theorems may also be applied[44].Aside from theorems applicable to minimum time problems without mixed constraints[14,Ch.3],we are unaware of any that guarantee the existence of a piecewise continuous optimal control.
Observe that eqs.(9)and(10)reveal a forced linear system with zero output.In this system,the state function ispand the input functions areνandμ.If this system is strongly observable onT∗x(t)M, thenp≡0. In certain situations, this fact can be used with the non-triviality condition to deduce that the necessary conditions are violated.This idea is explored further in the next section.
5 Main results
In this section,Problem P0 is analyzed to develop sufficient conditions for non-singularity so as to understand when optimal controls are on the boundary of the constraint set and to construct lossless convexifications. For problems with only a terminal objective, linear dynamics, and no mixed constraints,these sufficient conditions reduce to known conditions based solely on controllability of the(A,B)pair[16].The theorem distinguishes between time-invariant and timevarying problems.
Definition 4Problem P0 is said to be time-invariant ifA,B,C,D,y,andψdonotdependontime.Otherwise,ProblemP0 is time-varying.
The requisite conditions are now stated in Conditions 1 and 2.
Condition 1The dual linear system ΣT=(AT,CT,BT,DT)is strongly observable on the cotangent space TM.
Condition 2At least one of the following holds:
a)The problem is time-invariant and
ℓ(w(t))+∇t f φ(t f,x f)/=0for all t∈[t0,t f].
b)The problem is time-varying,C≡0,and the matrix

is full column rank.
For LTI systems, Condition 1 can be checked using Corollary 1.For LTV systems satisfying eq.(4),Condition 1 can be checked using Corollary 2.Both require computation of the weakly unobservable subspace given by the recursion in eq.(3).For LTV systems that do not satisfy eq.(4),a matrix ranktest[36]maybeusedprovidedM=Rdx.Theremaining case in which eq.(4)is not satisfied andM/= Rdxremains open.
CheckingCondition2ismoredifficult,ingeneral,because it depends on the solution.Notwithstanding,there are several practical cases where it is easily checked.
1. For time-invariant problems with minimum time objective,ℓ= 0 andφ=t f. Therefore, Condition 2a) is satisfied.Such a problem is solved in Sect.6.
2. For time-varying problems with minimum time objective and fixed final state,ℓ= 0,φ=t f, andTbecomes the identity matrix.Therefore,Condition 2b)is satisfied.Such a problem is solved in Sect.7.
3. For time-invariant problems with minimum fuel or energy objective in which the control is always on,ℓ>0 andφ= 0. Therefore, Condition 2a) is satisfied. The‘always on’constraint is important in aerospace applications.Such a problem is solved in Sect.8.
4. For time-varying problems with minimum fuel or energy objective in which the control is always on,the final time is free, and the final state is fixed,ℓ> 0 andTis full column rank.Therefore,Condition 2b)is satisfied.
Theorem 2Suppose Assumption1holds and let u be an optimal control forP0.If Conditions1and2hold,then u(t)∈∂U(w(t))almost everywhere.
ProofCorresponding to the cases in Condition 2,the proof consists of two parts.
a) Suppose the systemΣTis strongly observable onTMfor allt∈Iand the problem is time-invariant withℓ(w(t))+∇t f φ(t f,x f) /= 0. Suppose the set of times whereu(t) ∈int(U(w(t)))has positive measure.It follows from the piecewise continuity ofuthat there exists an intervalJ⊂Ion whichu(t) ∈int(U(w(t))).Equation (11) impliesμ≡0 onJ. Equations (9) and (10)reduce to

Because the system is strongly observable onTM,it follows from Definition 3 thatp≡0 onJ.Also,because the problem is time-invariant,the Hamiltonian is constant and ∇t f ψ(t f,x f) = 0. From equations (8) and (12), it follows that This meansp0must be zero since the parenthetical term has been assumed non-zero. This contradicts the nontriviality condition. Hence, the optimal controlu(t) ∈∂U(w(t))almost everywhere.

b) Suppose the systemΣTis strongly observable onT∗x(t)M,the problem is time-varying,C≡0, and the matrixTis full rank. Suppose the set of times whereu(t) ∈int(U(w(t))) has positive measure. It follows from the piecewise continuity ofuthat there exists an intervalJ⊂Ion whichu(t) ∈int(U(w(t))). Equation (11)impliesμ≡0 onJ.WithC≡0,equations(9)and(10)become
Because the system is strongly observable onT∗x(t)M,it follows from Definition 3 thatp≡0 onJ.Also,becausepis the solution of a homogeneous system,p≡0 onI.As a result,H[t]≡p0ℓ(w(t))onI.Equations(12)and(13)simplify to
Because the matrixTis full rank,p0= 0 andξ= 0.This contradicts the non-triviality condition.Hence,the optimal controlu(t)∈∂U(w(t))almost everywhere. ■
Itisnotuncommoninengineeringproblemsforthesystem to evolve in Rdxand be constrained to a manifoldM.That is,the manifold is not intrinsic to the dynamics but an extrinsic constraint.Such a problem is considered now.The state is constrained by the first-order state constraintz=Ex(t)whereEis a constant,surjective matrix andzis a constant–both given.First-order state constraints are those in which differentiationyieldsanon-zerocontrolterm[44],i.e.,E B(t)is full column rank.The problem is mathematically described below and labeled P1.The strategy in this section is to transform P1 back to P0 so that there is no explicit manifold constraint and the system intrinsically evolves on one.To do so,differentiate the state constraintz=Ex(t)with respect to time.

The parallel projection of ˙xis given by

such that the orthogonal projection is

Defining the following quantities:
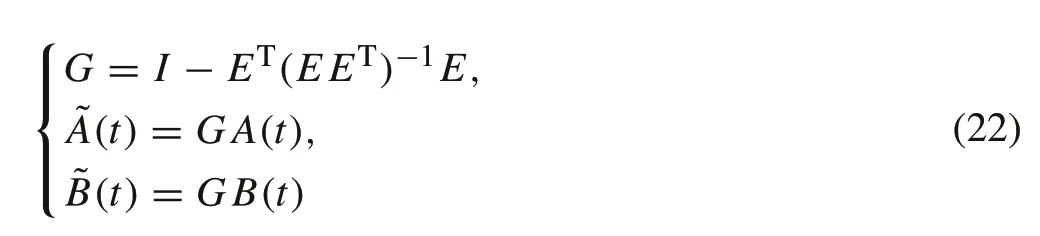
allows the above differential equation to be rewritten as

such thatx⊥(t) evolves on the manifoldM. Using equation (19), the state constraint can be written as the mixed constraint

When this constraint holds, the(A,B) and( ˜A, ˜B) systems are the same. Thus, the original mixed constraint is augmented as

where
6 Time optimal control of an LTI system
This section demonstrates the application of Theorem 2 on a minimum time optimal control problem with LTI dynamics.It is straightforward to see that Problem P0 can be cast as a minimum time problem by settingφ(t f,x f) =t fand the integral cost to zero.The manifoldM= R4and the scalar controlwis absent.The problem is labeled Ex1.
The system matrices are
Withthisdata,itcanbeshownthattheconstraintqualification in Assumption 1 is satisfied everywhere the optimal control is non-zero.Inspection of the optimal controls in Fig.2 reveals that the control vector is never zero.Hence,Assumption 1 is satisfied.
After four steps of the recursion in eq. (3), the weakly unobservable subspace for the dual systemΣT=(AT,CT,BT,DT)isV(ΣT)=0.It follows from Corollary 1 that the dual system is strongly observable and Condition 1 is satisfied.Condition 2a)is satisfied for time-invariant minimum time problems. Theorem 2 guarantees that the magnitude of the optimal control will be 5 except possibly at isolated points.
The problem is formulated in YALMIP[45]and numerically solved using SDPT3 [46] within the MATLAB environment[47].The discretization is described in Appendix 1 with a time step of 0.0025.The problem is solved on a 2019 iMac with 3.7 GHz 6-Core Intel Core i5 processor in 1.12 seconds.The optimal final time is approximately 3.24.The control components and magnitude are shown in Fig.2.As expected, the control magnitude is always 5. The optimal state trajectories are shown in Fig.3.Each component begins at 1 and terminates at zero.
7 Time optimal control of an LTV system
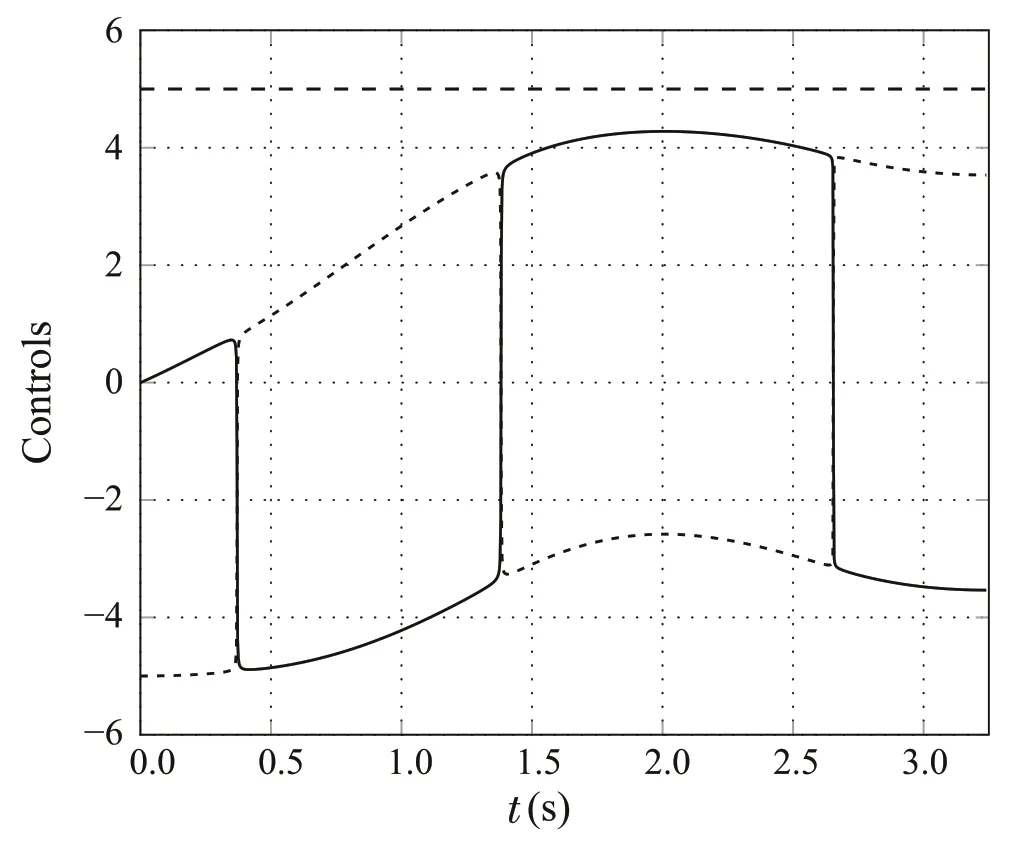
Fig.2 The control magnitude is the upper dashed line.Consistent with Theorem 2,it is constant with value of 5.The first control component(dotted curve) and second control component (solid curve) are also shown. They are piecewise continuous with switching times around 0.4,1.4,and 2.6
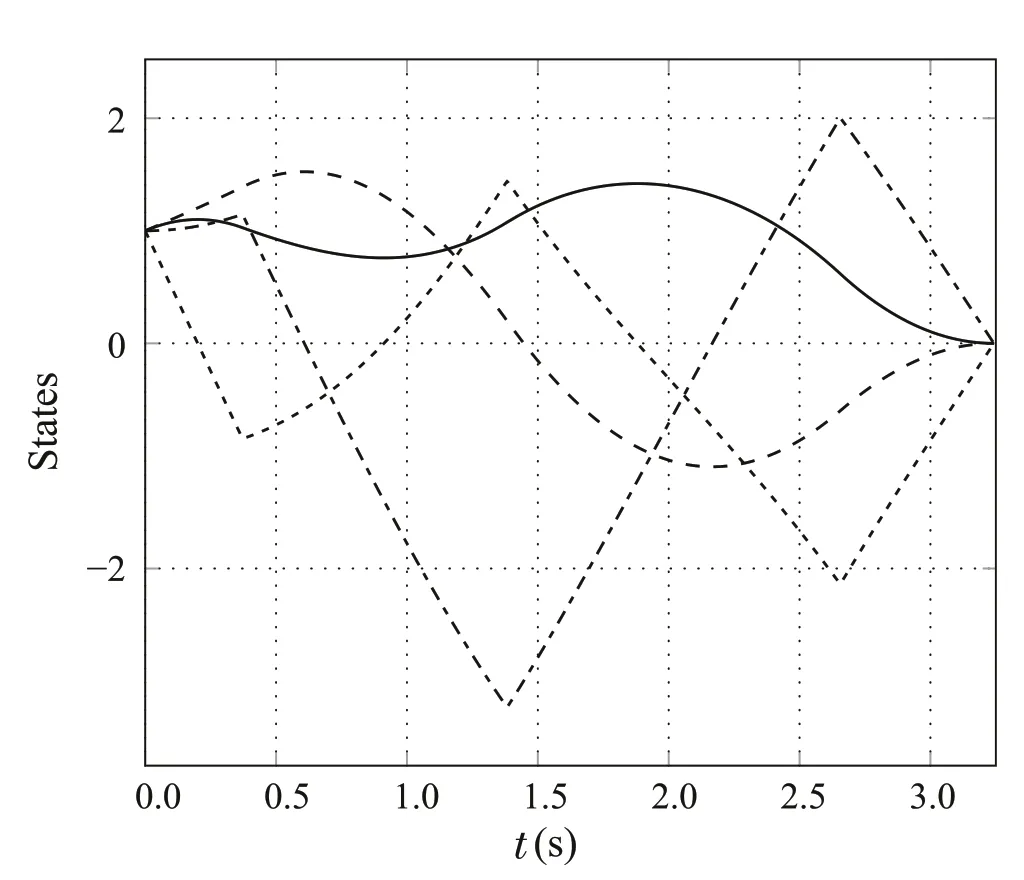
Fig.3 Thestatetrajectoriesareshown.Thefirstcomponentissolid.The second component is dashed.The third component is dotted.The fourth component is dash-dotted. The third and fourth components exhibit cusps at the times of control discontinuity
This section demonstrates the application of Theorem 2 on a minimum time optimal control problem with LTV dynamics.The system includes coupled harmonic oscillator dynamics and time-varying control influence matrix. As in the previous example,φ(t f,x f) =t f, the integral cost is zero, the manifold is R4,andwis absent.The problem is labeled Ex2.
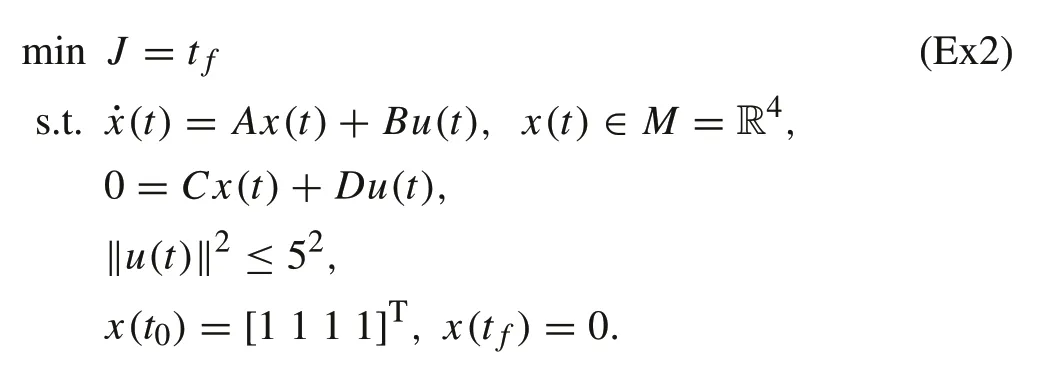
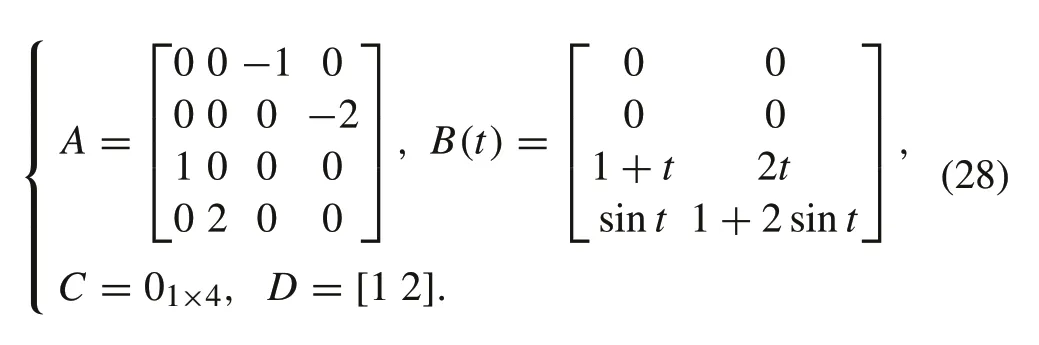
The system matrices are
As in the previous example, it can be shown that the constraint qualification in Assumption 1 is satisfied everywhere the optimal control is non-zero. Inspection of the optimal controls in Fig.4 reveals that the control vector is never zero.Hence,Assumption 1 is satisfied.

Upon defining the dual system isΣT=(Ad,Bd,Cd,Dd),which is timevarying.With
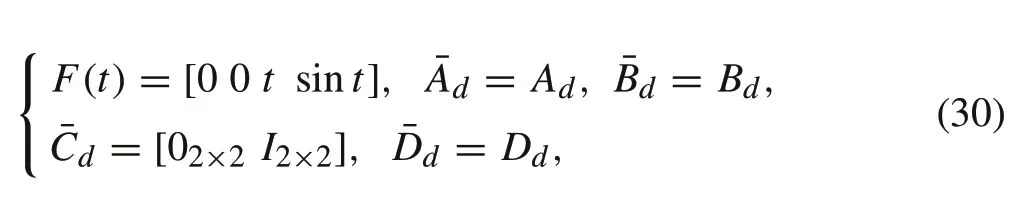
it follows that equation (4) is satisfied for the dual system,i.e.,


which is full column rank.Condition 2b)is satisfied.Theorem 2 guarantees that the magnitude of the optimal control will be 5 except possibly at isolated points.
The problem is formulated in YALMIP[45]and numerically solved using SDPT3 [46] within the MATLAB environment[47].The discretization is described in Appendix 1 with a time step of 0.0025.The problem is solved on a 2019 iMac with 3.7 GHz 6-Core Intel Core i5 processor in 1.01 seconds.The optimal final time is approximately 2.91.The control components and magnitude are shown in Fig.4.As expected, the control magnitude is always 5. The optimal state trajectories are shown in Fig.5.Each component begins at 1 and terminates at zero.
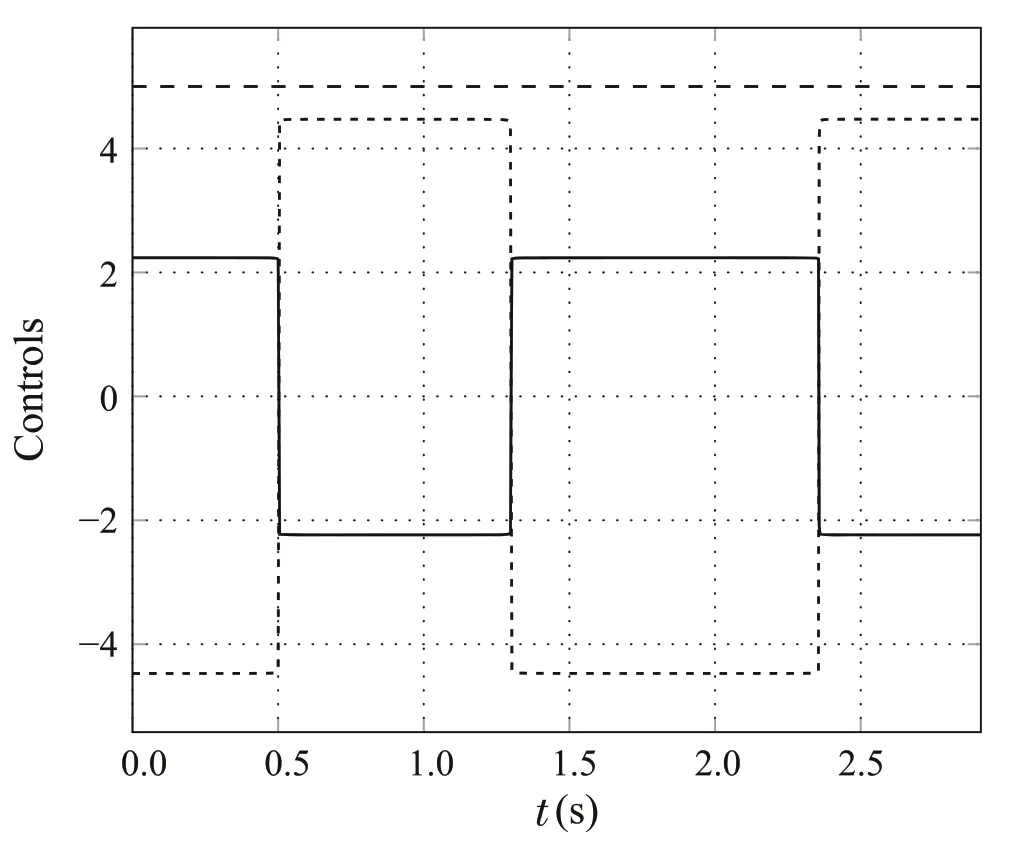
Fig.4 The control magnitude is the upper dashed line.Consistent with Theorem 2,it is constant with value of 5.The first control component(dotted curve) and second control component (solid curve) are also shown. They are piecewise continuous with switching times around 0.5,1.3,and 2.4
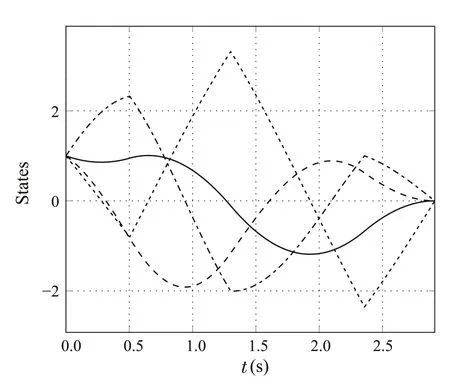
Fig.5 Thestatetrajectoriesareshown.Thefirstcomponentissolid.The second component is dashed.The third component is dotted.The fourth component is dash-dotted. The third and fourth components exhibit cusps at the times of control discontinuity
8 Fuel optimal control and lossless convexification
In this section,the minimum fuel planetary descent problem is solved.In the final powered decent phase of a Mars landing,the spacecraft is close enough to the surface of Mars so that gravity is assumed constant and the aerodynamic forces are assumed negligible compared to the thrust forces. Thedynamics of the spacecraft are given by
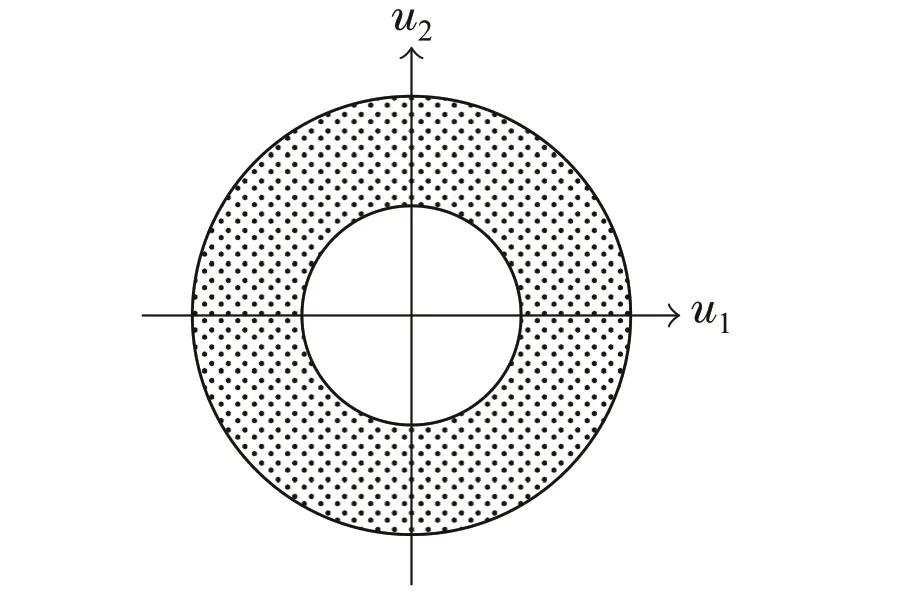
Fig.6 The annular constraint is shown.The outer circle represents the upper thrust bound.The inner circle represents the lower thrust bound.The feasible region is the hashed region between them.This constraint is non-convex

wherer(t) ∈ R3is the position vector,v(t) ∈ R3is the velocity vector,g= [0 −3.71 0]Tm/s2is the gravitational acceleration vector, andu(t) ∈R3is the control acceleration vector.The range,altitude,and cross range are denoted by the componentsr1,r2,andr3,respectively.The range rate, altitude rate, and cross range rate components arev1,v2,andv3,respectively.The combined state vector isx=[r1r2r3v1v2v3]Tsuch that the state equation is

The system matrices are

Chemical thrusters do not have deep throttle or reliable restart capabilities such that a non-convex, annular control constraint must be included.A two-dimensional representation of the constraint is shown in Fig.6.
With the lower bound set at 6 m/s2and the upper bound at 10 m/s2,the constraint is

In addition,the spacecraft is required to approach the landing site on a 45◦glide slope angle in the altitude/range plane such thatx1(t)−x2(t) = 0. Differentiating once givesx4(t)−x5(t)=0.The two equations define the manifold.

Given an initial condition inM,the first-order state constraint needed to keep the state inMis

The problem is to minimize the control effort required to transfer the spacecraft from an initial state

to the landing site(origin)with zero final velocity while satisfying the above constraints.The problem is labeled Ex3.
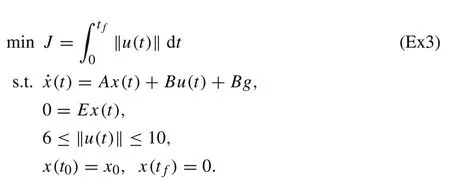
Note that this problem has an additional constantBgin the dynamics. This does not invalidate Theorem 2 as the term does not appear in the dual system. This is a non-convex optimal control problem because of the annular constraint.We propose the following convex relaxation,which is of the form P1.
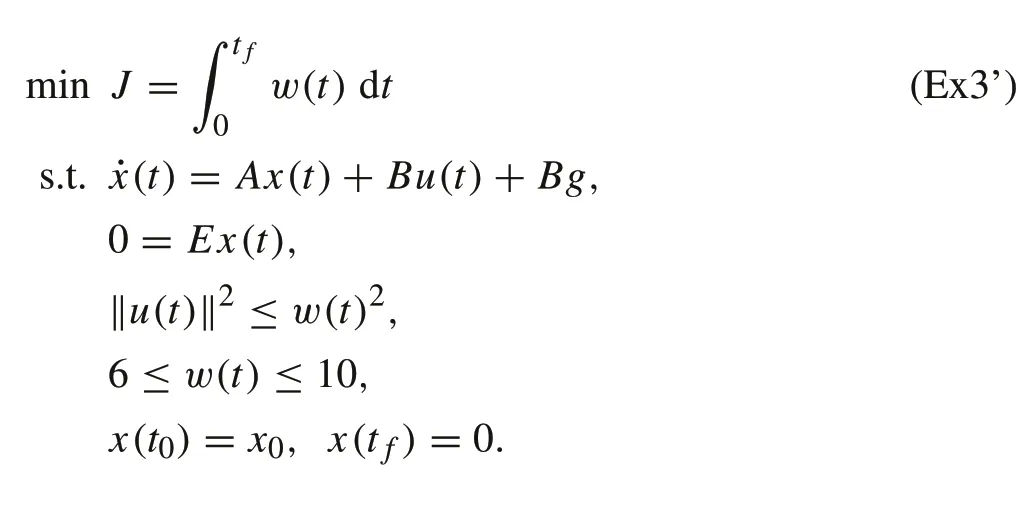
Observe that feasible solutions of Ex3’may not be feasible in Ex3 because ‖u(t)‖ is allowed to drop below the lower limit of 6.However,if it can be shown that the optimal controls in Ex3’satisfy‖u(t)‖=w(t),thenuwill be an optimal solution of Ex3.That is,u(t)needs to be on the boundary of the set

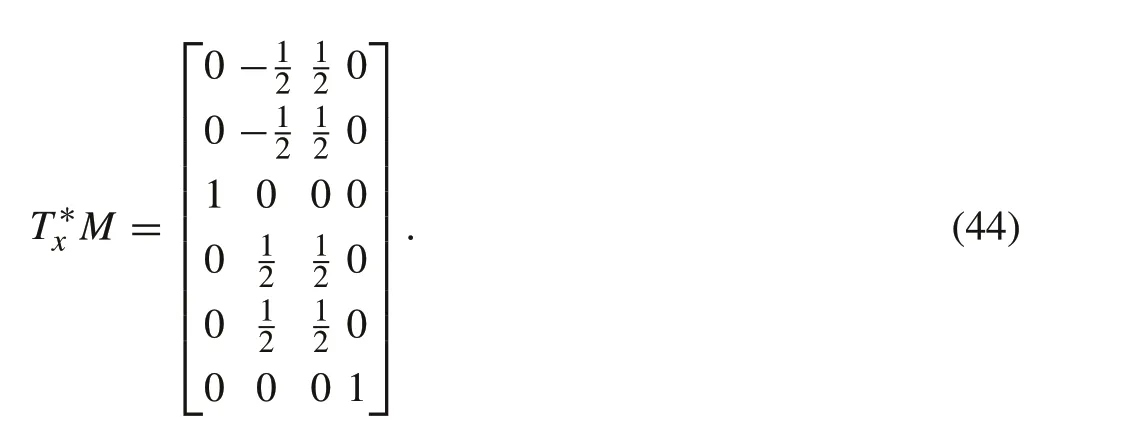
To prove that this is so,constructGas in equation(22).
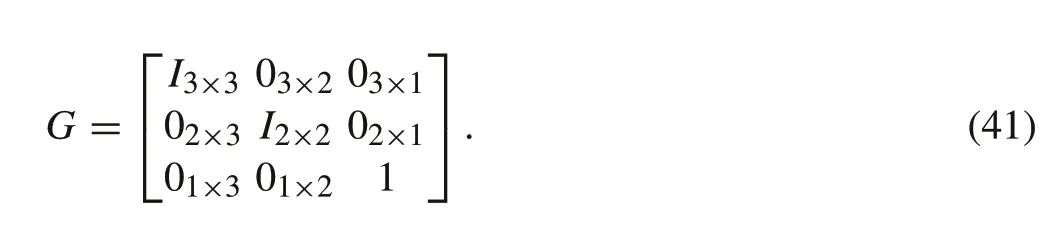
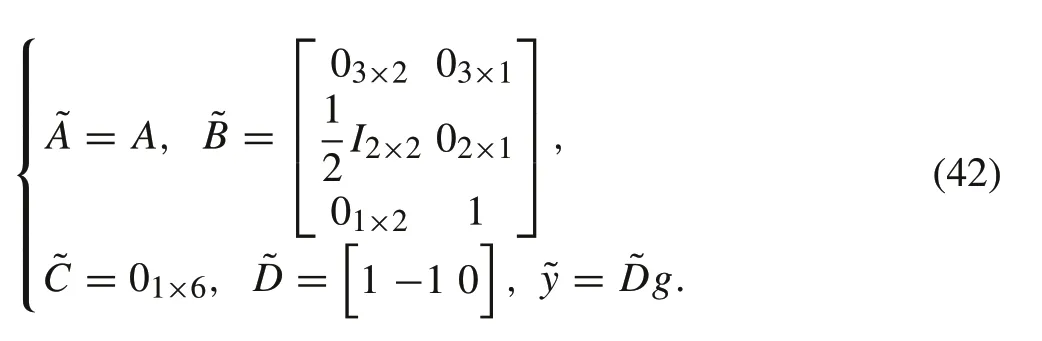
The final form of the problem is labeled Ex3”and is consistent with P0.
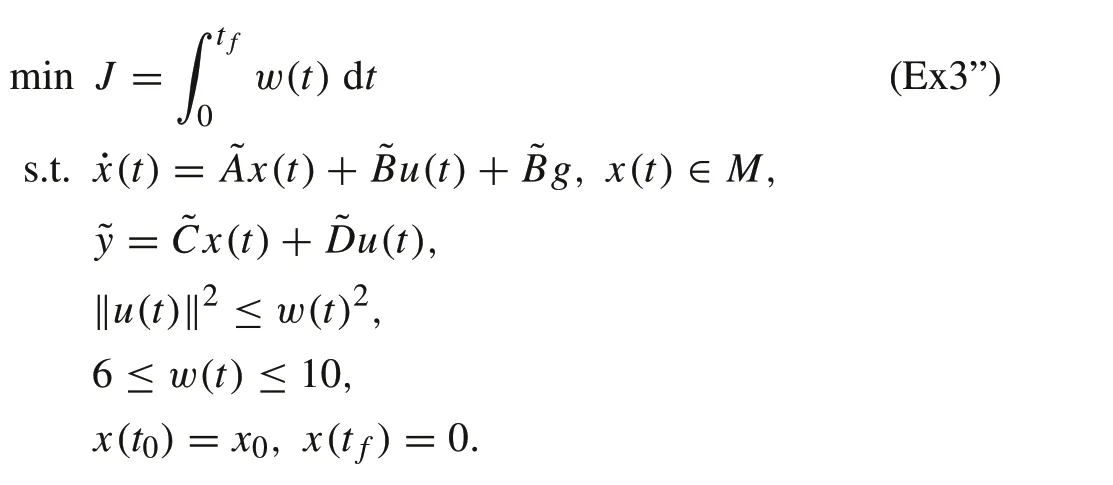
The constraint qualification in Assumption 1 is satisfied everywherethethirdcomponentoftheoptimalcontrolisnonzero.Inspection of the optimal controls in Fig.8 reveals that the third component crosses zero one time.Hence,Assumption 1 is satisfied.

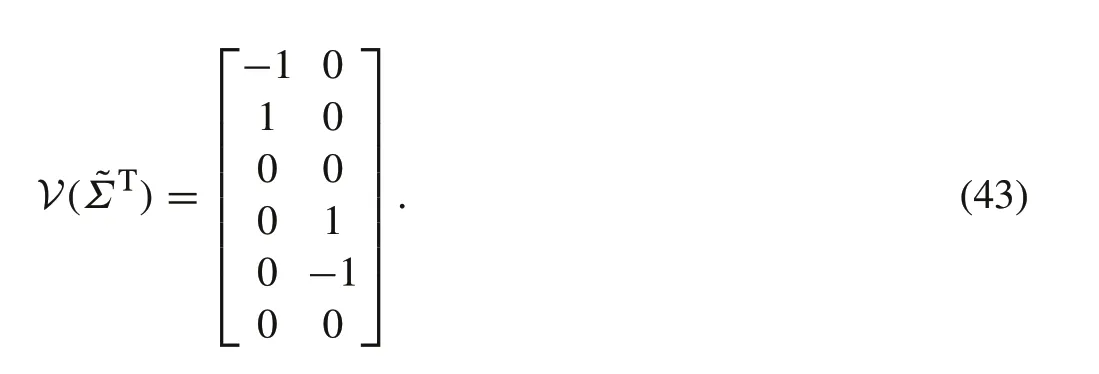
A basis for the cotangent space is
BecauseV()∩T∗x M=0,it follows from Corollary 1 that thedualsystemisstronglyobservableonthecotangentspace.Condition 1 is satisfied. Condition 2a) is satisfied becauseℓ(w(t)) =w(t) ≥6 andφis zero. Theorem 2 ensures that the optimal control has magnitude between 6 and 10.It follows that the convex problem Ex3” generates a solution to the original non-convex problem Ex3.
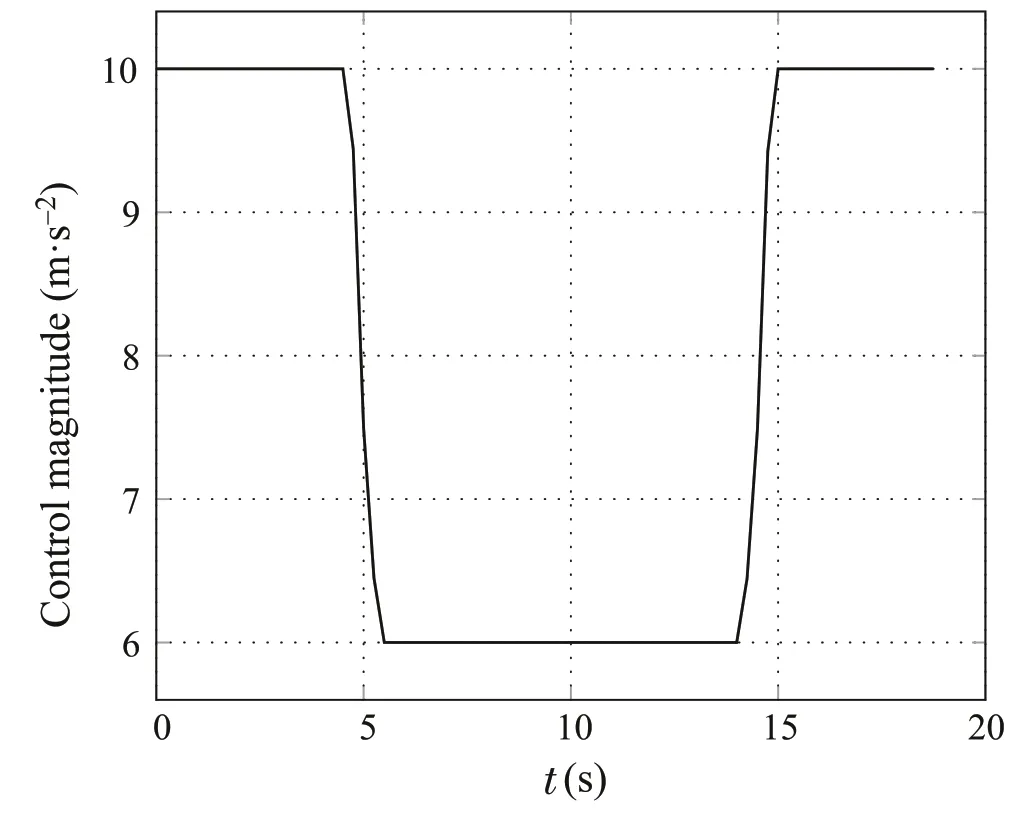
Fig.7 The optimal control is piecewise continuous with three arcs.The first arc is a maximum thrust arc.The second arc is a minimum thrust arc.The third arc is a maximum thrust arc
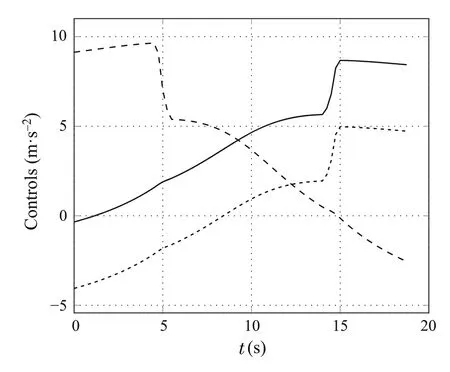
Fig.8 The first control component(dotted curve),second control component (solid curve), and third control component (dashed curve) are shown
The problem is formulated in YALMIP[45]and numerically solved using SDPT3 [46]within the MATLAB environment[47].The discretization is described in Appendix 1 with a time step of 0.25 seconds.The problem is solved on a 2019 iMac with 3.7 GHz 6-Core Intel Core i5 processor in 0.53 seconds.The optimal final time is approximately 19 seconds.The control magnitude is shown in Fig.7,and it is seen that the thrust magnitude is bounded between 6 and 10 as required.
The control components are shown in Fig.8.
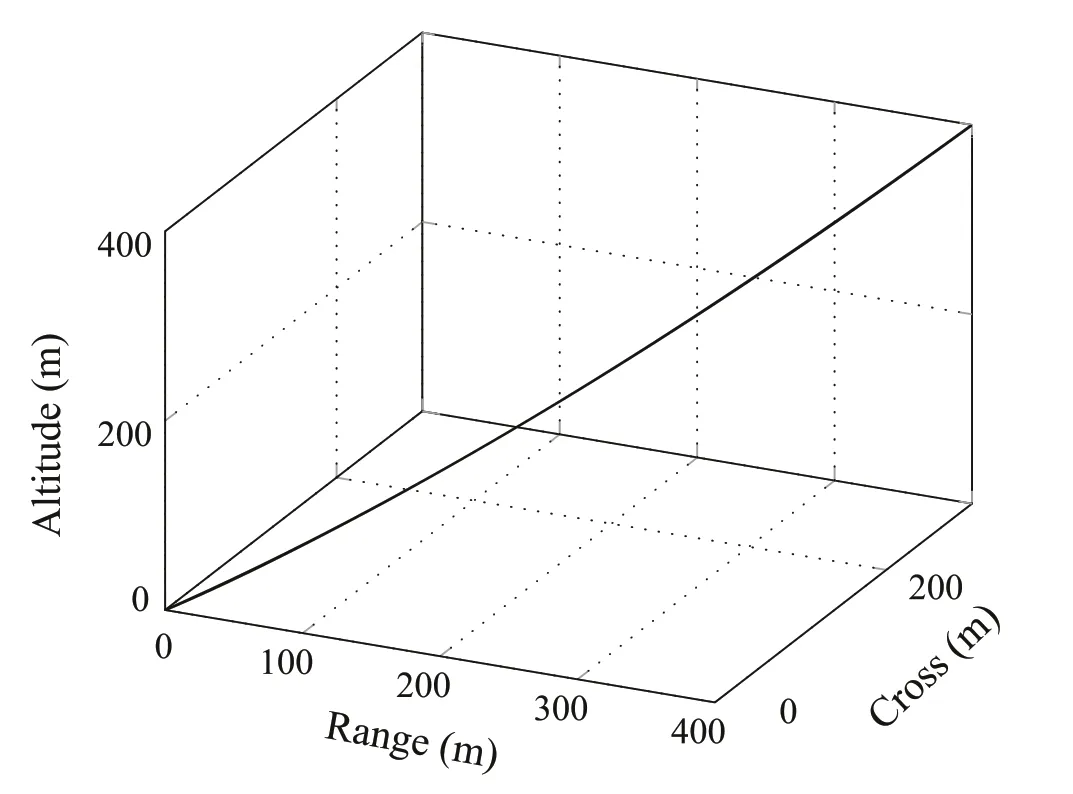
Fig. 9 The optimal position trajectory begins in the top right and descends along the manifold to the origin
Fig. 9 shows the optimal state trajectory. The trajectory begins at the top right,ends at the origin in the bottom left,and evolves on the 45◦plane.
Theorem 2 has enabled an exact convex relaxation of a non-convex optimal control problem. This makes it possible to solve the problem using second-order cone program solvers that guarantee convergence to the global minimum in polynomial time without an initial guess. In the absence of Theorem 2,one must solve Ex3 directly using a non-convex solver which requires an initial guess and does not have convergence guarantees.
9 Conclusions
For the class of optimal control problems studied,sufficient conditions for the optimal control to be non-singular have been presented. This was done in a geometric framework using a maximum principle on manifolds.It was found that strong observability of the adjoint system on the cotangent space is the key property that ensures non-singularity, and the new results enable lossless convexifications so that nonconvex optimal control problems can be solved in real-time using interior-point methods.The mathematical results were demonstrated on three examples: two minimum time problems and a minimum fuel problem.The paper’s main result was used to transform the minimum fuel problem to a convex form,which allowed it to be solved efficiently,making it suitable for real-time guidance applications.
A Numerical solution method
To numerically solve the infinite-dimensional problem P0,it is converted to a finite-dimensional parameter optimization problem.This is done by discretizing the problem and enforcing the constraints at the nodes.Note that the constraints in all of the examples are first or second-order cone constraints.Therefore, the resulting problems after discretization are finite-dimensional second-order cone programs that can be solved to global optimality using the powerful interior-point methods in convex optimization.We use a simple discretization method which is summarized below.
The time domain[0,t f]is discretized intoN+1 nodes separated byΔt.
ti=(i−1)Δt,i=1,...,N+1.
The states at timetiare denoted byx[i]and they exist at all nodesi=1,...,N+1.The controls at timetiare denoted byu[i]and they exist at nodesi= 1,...,N.The controls are held constant over every interval.The system dynamics are discretized using the fundamental matrix resulting in
x[i+1]=Φi x[i]+Γiu[i],i=1,...,N,
whereΦiandΓiare matrices given by

Theintegralcostcanbeapproximatedbyusinganynumerical integration technique,e.g.,trapezoidal integration:

All other constraints are enforced at the nodes.For example,control constraints are written as
‖u[i]‖≤w[i], ∀i=1,...,N,
ρ1≤w[i]≤ρ2, ∀i=1,...,N.
The result is a finite-dimensional approximation to the infinite-dimensional optimal control problem.For free final time problems,a line search is conducted to find theNgiving the least objective.
杂志排行
Control Theory and Technology的其它文章
- Retrospect and prospect on integration of gain and phase for feedback stability analysis
- Mu-based trajectory tracking control for a quad-rotor UAV
- A new path planning method for bevel-tip flexible needle insertion in 3D space with multiple targets and obstacles
- Discrete-time sliding mode control with power rate exponential reaching law of a pneumatic artificial muscle system
- Bipartite consensus for nonlinear time-delay multiagent systems via time-varying gain control method
- Cooperative distributed state estimation:resilient topologies against smart spoofers