无人机点射式水稻播种装置控制系统设计与试验
2022-02-07何伟灼顾庆宇黄俊浩邹帅帅徐学浪周志艳
何伟灼,刘 威,姜 锐,顾庆宇,黄俊浩,邹帅帅,徐学浪,周志艳
·农业装备工程与机械化·
无人机点射式水稻播种装置控制系统设计与试验
何伟灼,刘 威,姜 锐,顾庆宇,黄俊浩,邹帅帅,徐学浪,周志艳※
(1. 华南农业大学工程学院/岭南现代农业科学与技术广东省实验室,广州 510642;2. 广东省农业人工智能重点实验室,广州 510642;3. 广东省农业航空应用工程技术研究中心,广州 510642;4. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642)
针对当前无人机水稻撒播难以成行成穴、落种易受旋翼风场干扰和播种均匀性不佳等问题,该研究结合点射式水稻播种装置和飞行控制器设计了一套播种控制系统,开发了配套的地面站功能,并制作了样机。控制系统基于PID算法实现排种器步进电机的转速闭环控制,通过标定模型对振动电机激振力和摩擦轮电机转速进行控制,并根据状态机设计播种控制程序。以3倍丸粒化稻种为对象,从播种量准确性、播种成行性和播种均匀性3个方面对样机的播种性能进行验证并优选合适的播种参数。试验结果表明:无人机模拟飞行的播种量准确性测试中,样机以1.0~2.5 m/s的作业速度进行播种时,播种量的平均相对误差小于4%,控制系统具有较好的动态调节能力。实地飞播测试中,样机以1.0和1.5 m的高度播种时,种子分布在12 cm种行宽度内的平均概率超过80%,成行性较好。考虑安全因素,优选1.5 m为样机的适宜作业高度。在作业高度为1.5 m,3倍丸粒化稻种的播种量为90~150 kg/hm2(对应裸种的播种量22.5~37.5 kg/hm2),作业速度为0.5~2.0 m/s时,播种均匀性变异系数为20.51%~35.52%。进一步分析发现,适当提升作业速度可提高播种均匀性。田间试验结果表明,播种量的相对误差分别为2.47%和4.12%,播种均匀性变异系数分别为22.17%和21.82%,种子破损率分别为0.34%和0.18%,满足相关标准的水稻飞播精度控制要求。研究结果可为无人机水稻直播技术提供参考。
无人机;PID;水稻直播;点射播种;控制系统;状态机
0 引 言
水稻机械化直播是一种高效轻简化栽培技术,不仅能够稳产增产,还能减轻劳动强度,促进节本增收,近年来得到了广泛关注和推广[1-2]。但对于高差大、深泥脚易陷车、形状不规则的稻田,地面机械下田作业较困难[3-6],而无人机具有较好的通过性,受地形地貌的影响较小,可灵活规划航线和自主飞行[7-9],且不破坏田埂,播种速度快。因此无人机播种正逐渐成为一种新的播种方式。
目前无人机播种以撒播作业为主,撒播装置可分为离心式[10-12]和气力式[13-14]两种。相比人工撒播,无人机撒播的播种均匀性有所提高[15],但存在以下不足:1)种子在下落过程中,容易受旋翼风场的干扰,导致落种位置不可控,播种均匀性不佳;2)撒播难以达到成行成穴的播种效果,作物在后期生长时通风透气性较差,易滋生病虫害,且不便于田间管理;3)种子直播到稻田表面,容易被鸟类、鼠类取食或被雨水冲走,从而造成缺苗现象。
针对撒播落种杂乱无章的问题,黄小毛等[16]基于离心式排种器设计了油菜飞播装置,以实现油菜条播作业。张青松等[17]基于槽轮式排种器设计了无人机油菜条播装置,并开展了油菜条播试验。陈博[18]设计了一种用于无人机条播的机载吹射式种子精量直播装置,作业时利用风机气流将种子吹出,实现成行落种。上述方式对种子的加速能力有限,为减少旋翼风场的干扰以保证条播效果,作业时播种装置的出种口需靠近地面(通常为0.5 m以内),存在较大的安全风险。
丁素明等[19]设计了一种农用无人机条播装置,该装置工作时利用电磁铁、弹簧和永磁体来构成弹性势能积累和释放的循环系统,从而通过弹力将种子弹出,达到种子加速的效果。该装置虽然能提高种子的下落初速度,但加速能力仍然有限,种子下落时仍易受旋翼风场等外部风力的干扰,且装置的运作方式复杂,播种速度易受限制。
为了解决上述问题,周志艳等[20]发明了一种点射式水稻播种装置,本文拟在该装置的基础上设计配套的播种控制系统,并通过试验探讨该装置合适的播种作业参数,以提高播种的准确性和均匀性,为无人机水稻直播技术的研究提供参考。
1 点射式水稻播种无人机结构
1.1 整机结构
点射式水稻播种无人机如图1所示。整机主要由机架、排种器、分种器、5个点射式播种模块、角度调节装置、导向管、步进电机、质量传感器和种箱组成。种箱通过左右两侧的质量传感器与机架固接,质量传感器用于实时称量种箱的质量,以监测种子余量信息。排种器的排种轮为槽轮式,排种轮与步进电机相连。排种器安装于种箱的底部,用于将种箱的种子排到下方的分种器。分种器的出口与5个点射式播种模块相连。导向管安装于点射式播种模块的出口,用于种子的导流和导向。角度调节装置用于调节导向管之间的间距,进而改变播种角度和播种行距。整机的有效载荷约为20 kg。

1.机架 2.排种器 3.分种器 4.点射式播种模块 5.角度调节装置 6.导向管 7.步进电机 8.质量传感器 9.种箱
1.2 点射式水稻播种装置
相关研究[21-22]指出,丸粒化后的水稻种子体积和质量明显增加,表面强度得到提升,形状更规则,利于机械化播种。本研究的水稻种子采用3倍丸粒化处理,以提升点射式水稻播种装置的播种性能。
播种前,通过角度调节装置调节5根导向管之间的间距,以改变播种行距。导向管的间距由作业高度和播种行距决定,如图2所示。
根据图2有:
式中1、4、5为固定参数,由机架及各部件的安装位置确定,分别为4.8、21.0和8.7 cm。化简后,导向管间距为

点射式水稻播种装置的结构如图3所示,其中,锥筒和振动电机组成稻种单粒排队机构,拉伸弹簧、活动电机座和摩擦轮电机组成稻种加速机构。工作时,排种轮按目标转速转动,将种子带入分种器,分种器将种子分流到5个点射式播种模块。进入点射式播种模块的种子,首先汇聚在锥筒中,在振动电机激振力和锥筒下方开口限制的共同作用下,种子进行单粒排队后进入摩擦轮间隙中进行加速。受到2个摩擦轮的加速作用,种子下落速度得到较大的提升。而在摩擦轮对种子加速的过程中,由于拉伸弹簧和活动电机座的设置,2个摩擦轮的间隙能够根据种子的大小自适应调节,可有效降低丸粒化稻种的破损率。最后被加速的种子在导向管的导向作用下逐粒高速射向泥面,且具有一定的入泥深度。

注:d1为分种器相邻出口距离,cm;d2为间距调节的中间变量,cm;d3为相邻导向管间距,cm;d4为分种器出口与角度调节装置的距离,cm;d5为角度调节装置与无人机最底部的距离,cm;H为作业高度,cm;L为播种行距,cm。

1.排种器 2.排种轮 3.丸粒化水稻种子 4.分种器 5.锥筒 6.拉伸弹簧 7.摩擦轮电机 8.导向管 9.活动电机座 10.振动电机
2 控制系统设计
2.1 总体构成
点射式水稻播种装置中包含排种器步进电机、稻种单粒排队机构振动电机和稻种加速机构摩擦轮电机,控制系统需对这3种电机进行精确控制。为了提高播种控制系统和飞行控制器的耦合度,达到更好的控制效果,控制系统基于飞行控制器(DJI A3 flight controller,深圳市大疆创新科技有限公司)进行二次开发,如图4所示,播种控制板实现飞行控制器通讯、播种量实时控制、电机转速调节和播种状态转换等任务。

图4 控制系统总体构成
控制系统的工作流程为:作业前,在无人机地面站中规划航线和设定播种参数,并上传到飞行控制器和播种控制板。作业时,无人机自主飞行进入播种区域,播种控制板通过飞行控制器提供的Onboard SDK接口订阅无人机的实时经纬度坐标、速度、高度和航点状态等信息,并根据播种参数动态调节各个电机控制板的输出,进而驱动电机以不同转速运行,实现播种的动态调节。在播种过程中,实时播种量、电机状态和种子余量等信息在地面站显示。
2.2 排种器步进电机控制
2.2.1 驱动方案
选用42步进电机(42HB60-403A,乐清市德轩电机有限公司)驱动排种器排种轮,所选步进电机的保持转矩为0.9 N·m,额定电流为2.3 A,采用2颗TB64H450FNG(东芝)电机驱动芯片。
步进电机的控制方式为闭环控制,采用位置式PID算法进行速度控制,该算法的离散化公式为

式中K、K、K分别为PID控制器的比例、积分和微分系数,()为当前时刻目标转速与实际转速的误差,(-1)为上一时刻目标转速与实际转速的误差,()为所有时刻的误差积累和。最后采用试凑法对PID控制器的系数进行整定,整定后K为0.035,K为0.007,K为0.005。
2.2.2 目标转速调节
步进电机的转速决定了播种装置的排种速度,因此播种前需进行校准,电机转速和排种速度的关系为

式中V为电机转速,r/min;为排种速度,kg/min;该关系式一般为一元一次方程或一元二次方程。排种速度的计算公式为

式中为设定的播种量,kg/hm2;为播种装置的播种行数;为播种行距,m;UAV为无人机飞行速度,m/s。实际播种时,播种量和作业幅宽为定值,播种控制程序以50 Hz的频率对无人机速度采样,并以25 Hz的频率计算目标排种速度,进而得出目标转速,最后通过脉宽调制(Pulse Width Modulation,PWM)信号将目标转速输入到步进电机控制板,实现对步进电机的转速调节。
2.3 稻种单粒排队机构振动电机控制
2.3.1 驱动方案
稻种单粒排队机构中振动电机为直流有刷电机(XFF-030,惠州市信力电机有限公司),其额定电压为3 V,额定空载电流为0.3 A。L9110芯片(海天芯)具有两通道输出端,每通道可持续输出0.8 A电流,满足该电机的驱动需求。
2.3.2 目标激振力调节
激振力是衡量振动电机动力效应的一个重要指标,计算公式[23]为
式中为激振力,N;为偏心块质量,kg;为偏心块的偏心距,m;为偏心块的转动角速度,rad/s。经测量和计算,所选振动电机的偏心块质量为0.004 2 kg,偏心距为0.001 9 m。偏心块的转动角速度可由振动电机的转速算得,因此通过控制振动电机的转速可调节激振力。
振动电机控制板通过接收播种控制板的PWM信号来对电机调速,而PWM占空比与电机转速一般为非线性关系,因此需进行PWM占空比-转速标定。标定时,PWM占空比的测定范围为8%~100%(占空比低于8%时,电机转速不稳定,无法正常测量),每4个百分点作为1个水平,测量不同占空比对应的电机转速。电机的转速用测速频闪仪(SW-6500,广州市速为电子科技有限公司)测量,PWM占空比-转速的标定结果如图5a所示,PWM占空比-激振力的标定结果如图5b所示。
根据标定结果,计算振动电机在空载时的最大激振力约为0.7 N。前期试验发现,激振力越大,振动锥筒的出种效果越好,因此后续试验设置振动电机的激振力为0.7 N。
2.4 稻种加速机构摩擦轮电机控制
摩擦轮电机选用直流无刷电机(DJI2008-KV1400,深圳市大疆创新科技有限公司),该电机的转速可达15 000 r/min以上,采用3S/20 A电子调速器(DSHOT600,深圳市好盈科技有限公司)驱动。
播种控制板输出PWM信号到电子调速器,PWM信号的周期为20 ms,一个周期内有效高电平脉宽范围为1~2 ms,对应占空比为0~100%。用测速频闪仪测定不同控制量占空比对应的电机转速,结果如图6所示。
由图6可知,控制量占空比在0~15%时,电机转速变化规律不明显,在15%~100%时,占空比和转速具有较高的线性关系。因此播种时占空比选择15%~100%,对应摩擦轮电机的调速范围为2 460~15 817 r/min。

图5 振动电机标定结果

图6 摩擦轮电机转速与占空比关系曲线
2.5 播种控制程序设计
样机的播种流程基于状态机程序实现,播种状态迁移图如图7所示。播种控制程序通过Onboard SDK获取飞行控制器的任务状态、航点状态、航点索引和飞行速度等信息,主要执行流程如下:
1)当无人机开始自动航线任务时,触发“航线开始”事件,此时依次启动摩擦轮电机和振动电机。
2)当无人机到达序号为奇数的航点时触发“到达航点”事件,此时启动步进电机,开始播种;无人机在序号为偶数的航点处换行,触发“正在换行”事件,此时关闭步进电机,暂停播种。航点示意图如图8所示。
3)在作业过程中,若无人机的速度降到0.2 m/s以下并保持300 ms,则触发“航线暂停”事件,此时关闭步进电机,暂停播种,并记录暂停点的经纬度坐标;若无人机终止航线任务,则触发“任务终止”事件,依次关闭步进电机、振动电机和摩擦轮电机。
4)航线暂停后,若无人机继续开始航线任务,并以0.2 m/s以上的速度飞行,则计算当前点与暂停点的距离。当距离小于0.5 m时,触发“到达航点”事件,继续播种,实现断点续播。
5)无人机完成航线任务后,触发“任务完成”事件,依次关闭步进电机、振动电机和摩擦轮电机,完成播种作业。

图7 播种状态迁移图
注:1~12为航点序号。
2.6 地面站设计
地面站具有航线规划和断点续航等功能[24],为实现点射播种控制,本文增加了播种量校准、播种参数设置以及状态信息显示等功能。地面站功能基于Android Studio平台结合飞行控制器的Mobile SDK进行二次开发,采用Handler消息队列和EventBus发布订阅框架实现图形用户界面与线程的异步通信。
播种量校准界面如图9a所示,播种量校准时步进电机转速的校准范围为0~34 r/min(转速为34 r/min左右时,达到了播种装置对3倍丸粒化稻种的极限吞吐量),转速每增加2 r/min作为一个校准点,每个校准点运行20 s,记录质量的变化值,由此得出对应排种速度。采用最小二乘法求出排种速度与电机转速的一元二次方程,最后在地面站界面中显示该方程的曲线。播种参数设置界面如图9b所示,作业高度范围0~3 m,播种行距范围0~50 cm,速度范围0~5 m/s,播种量范围0~300 kg/hm2(3倍丸粒化稻种的播种量),摩擦轮电机转速范围2 460~15 817 r/min,振动电机激振力范围0~0.7 N。图 9c为稻种余量信息及电机状态显示界面,稻种余量信息包括质量和状态2部分,当质量持续在0.5 kg以上时,状态显示“余量充足”,质量持续在0.5 kg以下时,则显示“余量不足”,以提醒无人机飞手及时添加种子。

图9 地面站功能界面示意图
3 样机性能试验
为验证样机的播种性能,优选样机播种作业参数,分别从播种量准确性、播种成行性和播种均匀性3个方面进行检验。试验选择丰田优1 999(谷粒长约9.7 mm,直播播种量一般为22.5~37.5 kg/hm2)作为播种对象,进行3倍丸粒化处理(丸粒化后质量是原来的4倍,后续试验所述的播种量均指3倍丸粒化稻种的播种量)。
3.1 播种量准确性试验
3.1.1 试验方法与评价指标
采用飞行控制器自带的模拟飞行功能,进行播种量准确性的测试。播种量的准确性主要由排种轮电机的控制精度决定,为了避免摩擦轮对丸粒化稻种造成损坏,在试验前将点射式播种模块和导向管拆除,试验如图10所示。
试验设计如下:
1)在种箱中放入足量的丸粒化稻种,并在分种器下方放置接料盒。采用地面站的校准功能对该批次种子的播种量进行校准。
图10 播种量准确性试验
2)在地面站上规划666.7 m2的播种区域,并设定播种参数:播种量为150 kg/hm2(对应裸种的播种量为37.5 kg/hm2),播种行距为25 cm,飞行高度为1.5 m。
3)不同飞行速度对播种的准确性有较大影响,以飞行速度为变量,设置4个水平进行试验,分别为1.0、1.5、2.0和2.5 m/s(播种量为150 kg/hm2,速度为2.5 m/s以上时,步进电机瞬时转速在34 r/min以上,达到了播种装置对3倍丸粒化稻种的极限吞吐量),共4组试验,每组试验重复5次,每次试验后用电子秤(MAX-FS-30kg,深圳市无限量衡器有限公司)称量接料盒,去皮得出单次试验实际的播种用量(kg),最后换算为播种量(kg/hm2)。
播种量准确性的评价指标为播种量的相对误差,计算公式为

式中Q为实际播种量,kg/hm2;Q为目标播种量,kg/hm2;为播种量相对误差,%。
3.1.2 试验结果与分析
试验结果如表1所示,随着无人机速度的增加,实际播种量变小,误差逐渐增大,原因可能是无人机在换行过程中速度产生剧烈变化,而控制系统的响应存在延迟,造成实际播种量偏小。在所选作业速度范围内,单次试验的播种量相对误差较小,每组试验的平均相对误差均小于4%,表明样机在理想条件下以1.0~2.5 m/s的速度进行播种,播种量准确性较好,也证明了控制系统具有较好的控制精度和动态调节能力。
3.2 播种成行性试验
3.2.1 试验方法与评价指标
为了保证样机飞行的稳定性和减少外界因素对样机播种效果的影响,试验在自然风风速≤3 m/s、天气晴朗的情况下进行,如图11a所示,试验前,在地面铺设2 m×7 m的平整、松软泥面作为采样区域(种子落地不反弹),接着在地面站上规划航线和设置播种参数,使样机能够在采样区域上方直线飞行和播种。样机按照预设的播种参数进行5行播种后,采用如图11b所示250 mm×500 mm的采样框确定落种区域并拍照,每行连续采集14个点(采样长度为7 m)。
为了更准确地分析种子的分布情况,对采样图片进行图像识别,导出种子的坐标数据,最后对坐标进行变换和整理,得到整体的种子分布坐标图,进而分析播种的成行性。

表1 3倍丸粒化稻种播种量准确性试验结果

图11 播种成行性试验
试验设计如下:
1)播种参数设置为:播种量为150 kg/hm2(对应裸种的播种量37.5 kg/hm2),速度为2.0 m/s,振动电机激振力为0.7 N,摩擦轮转速为8 000 r/min(此转速下种子入泥深度为2~10 mm左右),播种行距为30 cm。
2)不同作业高度对播种的成行性影响较大,以作业高度作为变量,设置3个水平进行试验,分别为1.0、1.5和2.0 m,根据式(2),3个作业高度时对应的导向管间距应调整为8.9、7.7和7.1 cm,以实现播种行距为30 cm。
播种成行性的评价方法如下:
以500 mm为一段划分每行种子,在每段的种子坐标中采用最小二乘法拟合一条一元线性回归曲线0,以该曲线为每段种子的成行参考直线。通过计算每个种子到参考直线的距离,得到种子的位置偏差,计算方法为
式中、、为一元线性回归曲线的系数;x为第个种子的横坐标;y为第个种子的纵坐标;D为第个种子到参考直线的距离(种子的位置偏差),m。每行种子的播种宽度(以下称“种行宽度”)可由种子的位置偏差数据确定,最后以种子分布在5~15 cm种行宽度的概率来评价成行效果的好坏。概率反应种子的集中度,在某个行宽度的概率越大,表明种子在该种行宽度内集中度越好,该种行宽度越小,表明播种的成行性越好。
3.2.2 试验结果与分析
不同作业高度下,落种分布图和种子分布在各种行宽度的概率分别如图12、表2所示。由图12和表2可知,每组试验中第3行(中间行)的种子分布相对集中,其他行的种子分布较为离散,可能是因为播种装置的第3个导向管垂直于地面,使得第3行的种子在下落时受重力和无人机旋翼风场的影响最小,从而分布更集中。从概率的角度分析,高度为1.0 m时,种子在9 cm的种行宽度内有较好的集中度,平均概率为82.82%;高度为1.5 m时,种子在12 cm的种行宽度内有较好的集中度,平均概率为83.08%;但高度为2.0 m时,种子分布在15 cm种行宽度内的平均概率只有75.18%,种子集中度比高度为1.0和1.5 m时的差,说明随着高度的增加,种子分布离散程度增加。总体来看,作业高度为1.0和1.5 m时,种子在12 cm的种行宽度内集中度都较好,平均概率均超过80%,成行性较好,基本不会出现邻行种子重叠的现象。考虑到近地飞行存在较大的安全风险,1.0 m左右的高度过于靠近地面,因此后续试验中样机的作业高度选择1.5 m。
3.3 播种均匀性试验
3.3.1 试验方法与评价指标
播种均匀性试验的示意图如图13a所示,试验场地设置及气象条件同3.2.1节;采样框大小为200 mm×300 mm,如图13b所示,采样长度为10.2 m,即每行连续采集34个点。
试验方案如下:
1)以播种量和作业速度作为变量,分析播种均匀性的变化情况,得出样机合适的作业速度范围。播种量设置3个水平,分别为90、120和150 kg/hm2(对应裸种的播种量22.5、30和37.5 kg/hm2),作业速度设置4个水平,分别为0.5、1.0、1.5和2.0 m/s,

图12 不同作业高度下的落种分布

表2 不同作业高度下种子分布在各种行宽度的概率

2)其他播种参数设置:作业高度1.5 m,振动电机激振力设置0.7 N,摩擦轮转速设置8 000 r/min,播种行距设置30 cm,根据式(2),导向管间距调整为7.7 cm。试验后,统计每个采样点的种子粒数。
以播种均匀性变异系数作为播种均匀性的评价指标,变异系数越小,说明播种越均匀,计算公式为



3.3.2 试验结果与分析
试验结果如表3所示,从种子平均粒数的角度分析,播种量一定时,无人机作业速度改变,种子平均粒数变化较小,证明播种控制系统在定量播种时工作性能较为稳定,能较好地适应无人机速度实时调节播种量。从变异系数角度分析,各行播种均匀性变异系数的最小值和最大值为15.21%和39.95%,对整体进行分析,平均播种均匀性变异系数为20.51%~35.52%,符合NY/T 3881—2021 《遥控飞行播种机质量评价技术规范》中水稻条播的播种均匀性变异系数 ≤45%的要求[25]。
对表3进一步分析,当播种量一定时,随着无人机作业速度的增加,播种均匀性变异系数变小;当无人机作业速度一定时,播种量增大,播种均匀性变异系数存在变小的趋势。分析原因为:当瞬时播种量较小时,槽轮式排种轮的转速较慢,此时脉动性较强[26],容易造成播种不均匀问题;而瞬时播种量较大时,排种轮的转速较快,可改善排种脉动问题。因此实际播种时,在播种装置未达到极限吞吐量的条件下,适当增加样机的作业速度以提升瞬时播种量,可提高播种的均匀性。对于3倍丸粒化稻种,当播种量为150 kg/hm2时,若作业速度设置2.5 m/s以上,瞬时播种量较大,播种装置容易出现堵塞现象,因此作业速度2~2.3 m/s较为合适。

表3 3倍丸粒化稻种播种均匀性试验结果
4 田间试验
为了进一步验证样机实际的应用效果,分别于2022年4月16日和2022年4月22日,分别在广州增城朱村镇大岗村(试验1)和广州华南农业大学增城教学科研基地(试验2)开展了2次田间播种试验,试验时天气状况良好,自然风风速≤3 m/s,具体试验方案和试验结果如表4所示。水稻种子经过3倍丸粒化处理,且在播种前进行了播种量校准。根据当地种植农户的建议,2次试验的播种量设置为150 kg/hm2(对应裸种37.5 kg/hm2)。综合考虑土壤软硬度及旋翼风场的干扰情况,根据前期试验及经验判断,摩擦轮电机转速设置为8 000 r/min。综合考虑作业的安全性及成行效果,作业高度设置为1.5 m。播种前根据式(2)将导向管间距调整为7.2 cm,使播种行距为25 cm。作业速度分别设置为2.0和2.3 m/s。
2次试验的播种量相对误差分别为2.47%和4.12%,该结果与播种量准确性试验的结果相近,再次证明了播种控制系统具有较好的控制精度,动态调节性能较稳定。由于田间环境复杂,下田采集数据困难,且采集数据时容易破坏播种区域,因此只对播种区域的某一行采样并拍照,分析播种均匀性变异系数,结果分别为22.17%和21.82%。
根据采样图片统计丸粒化稻种外层包衣破损率和内部种子破损率,如图14a所示。破损率计算公式为
式中为包衣或种子的破损率,%;1为包衣或种子破损粒数;2为样本总粒数。
结果表明:包衣破损率分别为3.79%和4.20%,种子破损率分别为0.34%和0.18%。对照现行标准《遥控飞行播种机质量评价技术规范(NY/T 3881—2021)》,播种均匀性和种子破损率均满足飞播的要求。
图14b为试验2的播种现场,播种前在试验田块开水沟,以方便后期排灌水。图14c为播种后种子的成行成穴效果,可见种子成行地落于泥中,形成小浅坑,遇到下雨时种子不易被冲走。播种后,在播种区域随机选取4个500 mm×500 mm的采样点,调查出苗率,结果如图 14d所示,第11 d的平均出苗率为68.05%,第17 d的平均出苗率为74.5%。图14e为播种后29 d的水稻长势,大部分区域水稻成行生长,但也存在缺苗的区域,缺苗原因可能是排灌水不及时造成部分区域过涝或过旱,从而影响了出苗率。

表4 田间试验方案和结果
注:试验稻种均为3倍丸粒化,谷粒长度分别为9.6和9.3 mm。
Note: The rice seeds used for test were the 3-fold pelleted, with lengths of 9.6 and 9.3 mm, respectively.
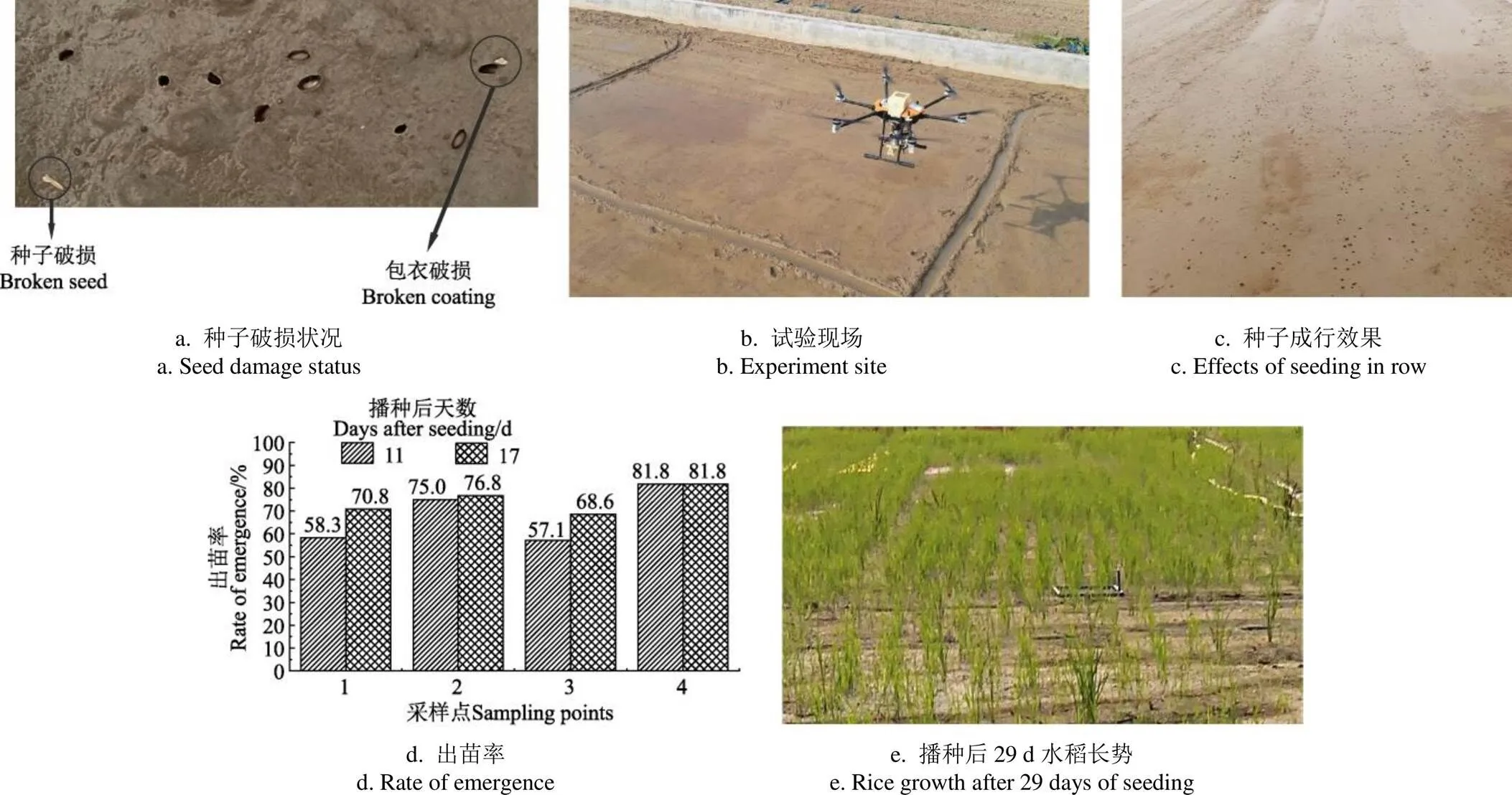
图14 华南农业大学增城教学科研基地田间试验
5 结 论
1)设计了无人机点射式水稻播种装置控制系统,开发了配套的地面站功能,并制作了样机,实现了整机播种过程的控制。
2)开展了样机的播种量准确性、播种成行性和均匀性试验,结果表明:样机在模拟飞行时,以1.0~2.5 m/s的速度进行播种作业,播种量平均相对误差小于4%,证明控制系统具有较好的动态调节能力;在1.0和1.5 m的高度下作业,种子分布在12 cm种行宽度内的平均概率超过80%,成行性较好,考虑安全因素,优选样机适宜的作业高度为1.5 m;在1.5 m高度下,3倍丸粒化稻种的播种量设置为90~150 kg/hm2(裸种的播种量为22.5~37.5 kg/hm2),作业速度设置为0.5~2.0 m/s时,平均播种均匀性变异系数为20.51%~35.52%。
3)开展了田间试验验证,播种量(3倍丸粒化稻种)的相对误差分别为2.47%和4.12%;2次田间试验的播种均匀性变异系数分别为22.17%和21.82%,种子破损率分别为0.34%和0.18%,播种控制系统具有较好的控制精度。
从田间试验的包衣破损率和种子破损率数据看出,摩擦轮对丸粒化稻种的损伤程度较小,主要是所选丸粒化稻种的包衣具有较高抗压强度,减少了摩擦轮对种子的损伤。但种子破损受丸粒化粉剂类型、摩擦轮电机转速、排种量等因素影响,要进一步降低破损率,需开展系统的对比试验研究。另外,试验中摩擦轮电机转速为经验值,未考虑影响种子入泥深度的因素,种子入泥深度与土壤软硬度、摩擦轮电机转速、风场干扰等因素相关,后续需结合农艺和播种作业参数进一步开展试验研究。
[1] Farooq M, Siddique Kadambot H M, Rehman H, et al. Rice direct seeding: Experiences, challenges and opportunities[J]. Soil and Tillage Research, 2011, 111(2): 87-98.
[2] 罗锡文,王在满,曾山,等. 水稻机械化直播技术研究进展[J]. 华南农业大学学报,2019,40(5):1-13.
Luo Xiwen, Wang Zaiman, Zeng Shan, et al. Recent advances in mechanized direct seeding technology for rice[J]. Journal of South China Agricultural University, 2019, 40(5): 1-13. (in Chinese with English abstract)
[3] 周志艳,袁旺,陈盛德. 中国水稻植保机械现状与发展趋势[J]. 广东农业科学,2014,41(15):178-183.
Zhou Zhiyan, Yuan Wang, Chen Shengde. Current status and future directions of rice plant protection machinery in China[J]. Guangdong Agricultural Sciences, 2014, 41(15): 178-183. (in Chinese with English abstract)
[4] Wan J J, Qi L J, Zhang H, et al. Research status and development trend of UAV broadcast sowing technology in China[C]//2021 ASABE Annual International Virtual Meeting. Michigan, USA: American Society of Agricultural and Biological Engineers, 2021: 1-12.
[5] 兰玉彬,陈盛德,邓继忠,等. 中国植保无人机发展形势及问题分析[J]. 华南农业大学学报,2019,40(5):217-225.
Lan Yubin, Chen Shengde, Deng Jizhong, et al. Development situation and problem analysis of plant protection unmanned aerial vehicle in China[J]. Journal of South China Agricultural University, 2019, 40(5): 217-225. (in Chinese with English abstract)
[6] 刁友,朱从桦,任丹华,等. 水稻无人机直播技术要点及展望[J]. 中国稻米,2020,26(5):22-25.
Diao You, Zhu Conghua, Ren Danhua, et al. Innovation and development of mechanized wet direct seeding technology for rice[J]. China Rice, 2020, 26(5): 22-25. (in Chinese with English abstract)
[7] Cai G W, Dias J, Seneviratne L. A survey of small-scale unmanned aerial vehicles: Recent advances and future development trends[J]. Unmanned Systems, 2014, 2(2): 175-199.
[8] 肖汉祥,李燕芳,袁龙宇,等. 我国农用无人机在水稻生产中的应用现状与展望[J]. 广东农业科学,2021,48(8):139-147.
Xiao Hanxiang, Li Yanfang, Yuan Longyu, et al. Application and prospect of China agricultural unmanned aerial vehicle in rice production[J]. Guangdong Agricultural Sciences, 2021, 48(8): 139-147. (in Chinese with English abstract)
[9] 朱海滨,马中涛,徐栋,等. 无人飞播水稻优质丰产“无人化”栽培技术体系探讨与展望[J]. 中国稻米,2021,27(5):5-11.
Zhu Haibin, Ma Zhongtao, Xu Dong, et al. Discussion and expectation of “unmanned”cultivation technology system for rice with high quality and yield suitable for UAV seeding[J]. China Rice, 2021, 27(5): 5-11. (in Chinese with English abstract)
[10] 黄稀荻,张弛. 播撒机的物料检测机构、播撒机及植保无人机:CN108698697A[P]. 2018-10-23.
[11] 肖尚读,侯洁明. 一种顺畅播撒的颗粒播撒器:CN210782034U[P]. 2020-06-19.
[12] 彭冬星. 无人机搭载的水稻撒播机研究[D]. 长沙:湖南农业大学,2018.
Peng Dongxing. Study on a Rice Spreader Based on UAV[D]. Changsha: Hunan Agricultural University, 2018. (in Chinese with English abstract)
[13] 肖锭锋,蒋攀,何建兵. 撒播器、撒播装置及植保设备:CN209834003U[P]. 2019-12-24.
[14] 宋灿灿,周志艳,姜锐,等. 气力式无人机水稻撒播装置的设计与参数优化[J]. 农业工程学报,2018,34(6):80-88.
Song Cancan, Zhou Zhiyan, Jiang Rui, et al. Design and parameter optimization of pneumatic rice sowing device for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(6): 80-88. (in Chinese with English abstract)
[15] Li J Y, Lan Y B, Zhou Z Y, et al. Design and test of operation parameters for rice air broadcasting by unmanned aerial vehicle[J]. International Journal of Agricultural and Biological Engineering, 2016, 9(5): 24-32.
[16] 黄小毛,徐胡伟,张顺,等. 油菜成条飞播装置设计与试验[J]. 农业工程学报,2020,36(5):78-87.
Huang Xiaomao, Xu Huwei, Zhang Shun, et al. Design and experiment of a device for rapeseed strip aerial seeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(5): 78-87. (in Chinese with English abstract)
[17] 张青松,张恺,廖庆喜,等. 油菜无人机飞播装置设计与试验[J]. 农业工程学报,2020,36(14):138-147.
Zhang Qingsong, Zhang Kai, Liao Qingxi, et al. Design and experiment of rapeseed aerial seeding device used for UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(14): 138-147. (in Chinese with English abstract)
[18] 陈博. 机载吹射式种子精量直播装置及无人机:CN209366462U[P]. 2019-09-10.
[19] 丁素明,薛新宇,蔡晨,等. 一种农用无人飞机条播装置及控制方法:CN111516874B[P]. 2020-11-03.
[20] 周志艳,刘威,徐学浪,等. 一种排射式播种方法及应用该方法的排射式播种无人机:CN112789976A[P]. 2021-05-14.
[21] 赵正楠,张西西,王涛. 种子丸粒化技术研究进展[J]. 中国种业,2013(5):18-19.
[22] 梅俊豪. 种子丸粒化在水稻湿直播上的应用初探[D]. 武汉:华中农业大学,2017.
Mei Junhao. A Preliminary Study on Application of Seed Pelleting in Wet Direct Seeded Rice[D]. Wuhan: Huazhong Agricultural University, 2017. (in Chinese with English abstract)
[23] 张合军,王军玮. 几种常用偏心块偏心矩及其激振力的计算分析[J]. 矿山机械,1999(6):68.
[24] Song C C, Zhou Z Y, Zang Y, et al. Variable-rate control system for UAV-based granular fertilizer spreader[J]. Computers and Electronics in Agriculture, 2020, 180: 105832.
[25] 中华人民共和国农业农村部,NY/T 3881-2021:遥控飞行播种机质量评价技术规范[S]. 北京:中国农业出版社,2021.
[26] Zeng S, Tan Y P, Wang Y, et al. Structural design and parameter determination for fluted-roller fertilizer applicator[J]. International Journal of Agricultural and Biological Engineering, 2020, 13(2): 101-110.
Control system design and experiments of UAV shot seeding device for rice
He Weizhuo, Liu Wei, Jiang Rui, Gu Qingyu, Huang Junhao, Zou Shuaishuai, Xu Xuelang, Zhou Zhiyan※
(1.,,510642,;2.(-),510642,; 3.(),510642,; 4.(),,510642,)
Unmanned Aerial Vehicles (UAVs) have been widely used in rice direct seeding in recent years, due to the flexibility and high efficiency suitable for the terrain. Among them, UAV broadcast sowing has been one of the most UAV rice direct seeding, particularly with better seeding uniformity and work efficiency, compared with manual seeding. The broadcast sowing device can also be divided into the centrifugal disc and pneumatic types in China at present. However, the UAV broadcast sowing is easily affected by the rotor wind field, leading to uneven seeding. At the same time, the effect of seeding in the rows and holes can also result in air permeability and occurrence of diseases during the growth of rice in field management. In this study, a control system was designed for the rice shot seeding device in a flight controller order, in order to improve the uniformity and the accuracy of the seeding rate during UAV rice direct seeding. A UAV ground station function was also established to develop the experimental prototype. A closed-loop control was realized in the speed of the stepping motor using the Proportion Integral Derivative (PID). The calibration was then conducted to evaluate the excitation force of the vibration motor and the speed of the friction wheel motor. Finally, the seeding control program was designed to control the whole process of rice shot seeding using a Finite State Machine. The control functions included operation route planning, seeding rate calibration, parameter setting, seed remaining quantity display, and automatic seeding, in order to more easily realize the automatic operation of rice direct seeding. Taking three-fold pelleted rice seeds as the seeding objects, the seeding performance of the prototype was verified from three aspects: the accuracy of the seeding rate, the row effect, and seeding uniformity. The results showed that the average relative error of the seeding rate was less than 4% when the prototype flew at the speed of 1.0-2.5 m/s under the simulation. An excellent performance was achieved in the dynamic adjustment for the seeding control system, particularly with the relatively accurate seeding rate. Specifically, the average probability of seeds was 75.18% within the seed row width of 15 cm, when the prototype was seeding at the height of 2.0 m. By contrast, the average probability of seeds was higher than 80% within the seed row width of 12 cm, when the prototype seeding at the height of 1.0 and 1.5 m, indicating the better performance of the seeding row. Correspondingly, the working height of 1.5 m was preferred, in terms of safety. The average Coefficient of Variation (CV) of seeding uniformity was 20.51%-35.52% when the prototype worked at the height of 1.5 m with a speed of 0.5-2.0 m/s, and the seeding rate of three-fold pelleted rice seed of 90-150 kg/hm2(corresponding to the seeding rate of naked seeds was 22.5-37.5 kg/hm2). It infers that the working speed greatly contributed to the seeding uniformity. Two field experiments were carried out, according to the preferred seeding parameters, where the relative errors of the seeding rate were 2.47% and 4.12%, respectively, the seeding uniformity CV values were 22.17% and 21.82%, respectively, and the seed breakage rates were 0.34% and 0.18%, respectively. The seeding control system fully met the control accuracy requirements of UAV rice direct seeding, according to the standard Technical specification of quality evaluation for the aerial broadcast seeder by remote control (standard NY/T 3881-2021). This finding can provide a strong reference for the UAV rice direct seeding.
UAV; PID; rice direct seeding; shot seeding; control system; Finite State Machine(FSM)
10.11975/j.issn.1002-6819.2022.18.006
S147.2
A
1002-6819(2022)-18-0051-11
何伟灼,刘威,姜锐,等. 无人机点射式水稻播种装置控制系统设计与试验[J]. 农业工程学报,2022,38(18):51-61.doi:10.11975/j.issn.1002-6819.2022.18.006 http://www.tcsae.org
He Weizhuo, Liu Wei, Jiang Rui, et al. Control system design and experiments of UAV shot seeding device for rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(18): 51-61. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.18.006 http://www.tcsae.org
2022-06-25
2022-08-09
岭南现代农业实验室科研项目(NT2021009);广州市重点研发计划项目(202206010149);广东省科技计划项目(2021B1212040009);广东省乡村振兴战略专项(2020KJ261)
何伟灼,研究方向为无人机水稻播种技术。Email:957723414@qq.com
周志艳,博士,教授,研究方向为农业航空应用技术。Email:zyzhou@scau.edu.cn
中国农业工程学会会员:周志艳(E042100021M)
