基于适航要求的飞机和发动机多余度信号表决设计
2022-02-06段绍栋朱爱峰安罡
段绍栋,朱爱峰,安罡
(中国航发控制系统研究所,江苏无锡 214063)
0 引言
在军、民用航空控制系统中,系统信号存在双余度、3余度、4余度或更多余度,为保证系统控制所使用数据的一致性和有效性,需要对系统多余度信号进行表决。通过余度表决设计可提高系统的可靠性[1-3],增强系统容错能力[4-6]。
为了在多余度信号中表决出可靠、准确的信号用于系统控制,常采用算术平均[7-9],当信号之间差异大于预设阈值时,选择安全值[10](大值或低值或故障前值)或采用第3方模型值进行辅助表决,当信号均发生故障时,选择故障安全值[11-13],上述表决方法为同一系统层级内部多余度信号进行对等表决。发动机控制系统根据飞机和发动机的环境温度、压力信号进行推力控制,飞机大气计算机和发动机控制系统均采集环境温度、压力信号,飞机系统和发动机控制系统之间的信号精度、可靠性存在差异,并且在同一环境下,飞机的不同大气计算机、控制系统的双余度[14-16]采集的环境温度、压力信号不可避免存在差异。上述多余度信号对等表决方法不适用于飞机与发动机之间的多余度信号表决。
对于配装2台或4台发动机的飞机来说,不同发动机之间推力的一致性尤为重要,即飞行员操作油门杆/操纵杆到相同位置下,不同发动机应提供相同的推力,在不考虑发动机性能差异的条件下,这就要求多台发动机采用相同的环境温度、压力信号进行推力控制,而采用某个共同的飞机大气计算机信号进行多台发动机的控制能实现该需求。另外,根据航空发动机适航规定,发动机控制系统在飞机信号出现错误时不应导致发动机推力变化超过3%,这就要求在选择飞机信号时对飞机信号进行甄别,避免选用错误的飞机信号。同时,当飞机信号出现错误而切换到发动机控制系统信号时,应避免推力出现阶跃。
在满足适航要求的前提下,为实现多台发动机的推力一致性需求,本文提出了一种以发动机传感器信号为基准、优先考虑飞机信号的飞机发动机多余度信号加权平均表决算法。
1 加权系数计算
由于发动机控制系统温度、压力传感器信号一般为双余度,飞机的环境温度、压力信号一般来自大气计算机,大气计算机采用多余度一般不超过3个,为使本研究具备更好的通用性和指导性,本文以发动机控制系统双余度、飞机3余度(3个大气计算机)构型下的总温信号T2为例进行飞发多余度信号综合表决策略研究。
在飞机信号和发动机信号之间设计1个阈值Δ1,当选择的飞机信号与发动机信号之间的差异在小于该阈值的范围内变化时,选择飞机信号,即使飞机信号存在漂移或错误,发动机推力变化也不超过3%;设计另一阈值Δ2,满足Δ1<Δ2(Δ2可取2Δ1),当飞机信号与发动机信号之间差异大于Δ2时选择发动机信号,介于Δ1和Δ2之间时,将飞机信号与发动机信号进行加权平均,实现信号选择平滑过渡,以避免推力发生阶跃跳动。加权系数计算如图1所示。
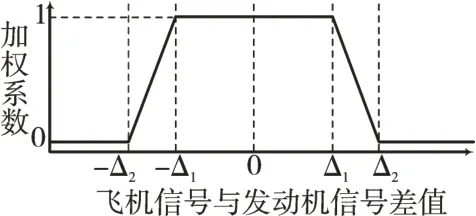
图1 加权系数计算
针对发动机控制系统双通道架构,每个通道采集1个余度的总温信号,本通道记作T2A,对方通道记作T2B。飞机3个大气计算机各采集1个总温信号,大气计 算机1、2、3的总 温 信号 分别 记 作T2ADC1、T2ADC2、T2ADC3。飞机3个大气计算机总温信号分别与本通道T2A、对方通道T2B计算加权系数,分别记作C1A、C2A、C3A、C1B、C2B、C3B,见表1。当某个大气计算机信号故障或某通道传感器故障时,对应的加权系数均为0。
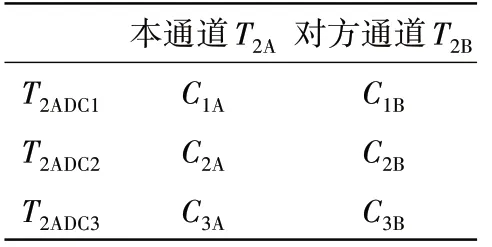
表1 加权系数符号
2 飞机信号选择
飞机信号选择包括T2ADC1、T2ADC2、T2ADC33个信号选择以及对应的加权系数选择。
飞机3个大气计算机总温信号的可靠性、精度相当,为使双发或4发选择的信号相同,即为满足推力一致性需求,指定3个大气计算机总温信号按如T2ADC1>T2ADC2>T2ADC3的优先级顺序进行选择(如真实的T2ADC1、T2ADC2、T2ADC3性能存在差异,可按性能优劣确定优先级顺序)。
每个飞机信号分别与发动机双通道传感器信号进行加权系数计算并得到2个加权系数值,加权系数越大,说明与发动机传感器信号越接近,飞发整体信号精度越高,因此选择加权系数大者作为该飞机信号对应的加权系数。选择T2ADC1的加权系数为C1=max(C1A,C1B),T2ADC2的加权系数为C2=max(C2A,C2B),T2ADC3的加权系数为C3=max(C3A,C3B)。
上述飞机信号选择的前提条件为发动机传感器至少有1个是正常的,能够根据发动机传感器信号计算各信号加权系数。当发动机传感器发生故障时,飞机3个信号按常规3余度信号进行选择:
(1)T2ADC1、T2ADC2、T2ADC3均正常,飞机信号选择为3个信号的中间值;
(2)T2ADC1、T2ADC2、T2ADC3中只有2个正常时,飞机信号选择为正常的2个信号的平均值;
(3)T2ADC1、T2ADC2、T2ADC3中只有1个正常时,飞机信号选择为正常的信号值;
(4)T2ADC1、T2ADC2、T2ADC3中3个均发生故障时,飞机信号选择为安全值,一般可取为故障前的值。
3 发动机传感器基准信号选择
在控制系统双通道信号T2A和T2B中选择出基准信号T2STD,选择原则为选择与飞机3个信号更接近的值,越接近则意味着飞机发动机信号整体精确度和可靠性越高,选择方法为对相应通道的加权系数之和的大小进行比较,系数越大则飞机信号和对应通道传感器越接近。具体方法如下:
(1)当双通道传感器正常,本通道传感器的加权系数之和(C1A+C2A+C3A)大于等于对方通道传感器的加权系数之和(C1B+C2B+C3B)时,选择本通道信号值T2A作为基准信号T2STD;
(2)当双通道传感器正常,本通道传感器的加权系数之和(C1A+C2A+C3A)小于对方通道传感器的加权系数之和(C1B+C2B+C3B)时,选择对方通道信号值T2B作为基准信号T2STD;
(3)当本通道传感器正常,对方通道传感器发生故障时,选择本通道信号值T2A作为基准信号T2STD;
(4)当本通道传感器发生故障,对方通道传感器正常时,选择对方通道信号值T2B作为基准信号T2STD;
(5)当双通道传感器均发生故障时,发动机传感器信号不参与表决。
4 飞发信号综合表决算法
基于上述加权系数计算、飞机信号选择、发动机传感器基准信号选择,飞发信号综合表决算法表达式为

其中,k1、k2、k3、k4为权重系数,有k1+k2+k3+k4=1。以发动机传感器信号为基准,优先考虑飞机信号的加权平均按如下方法确定权重系数k1、k2、k3、k4。
(1)T2ADC1为第1优先级顺序,C1为T2ADC1的加权系数,因此T2ADC1的权重系数k1=C1;
(2)T2ADC2为第2优先级顺序,C2为T2ADC2的加权系数,因此T2ADC2的权重系数k2=C2*(1-C1);
(3)T2ADC3为第3优先级顺序,C3为T2ADC3的加权系数,因此T2ADC3的权重系数k3=C3*(1-C1)*(1-C2);
(4)T2STD为最后优先级顺序,因此T2STD的权重系数k4=(1-C1)*(1-C2)*(1-C3)。
将已确定的权重系数代入式(1)可得飞发信号的表决结果

式(2)为飞机发动机信号全勤构型,T2ADC1、T2ADC2、T2ADC3、T2STD一共存在16种构型,构型真值见表2。表中T为真,F为假,当双通道T2传感器至少有1个正常时,T2STD正常;当双通道T2传感器均发生故障时,T2STD故障。
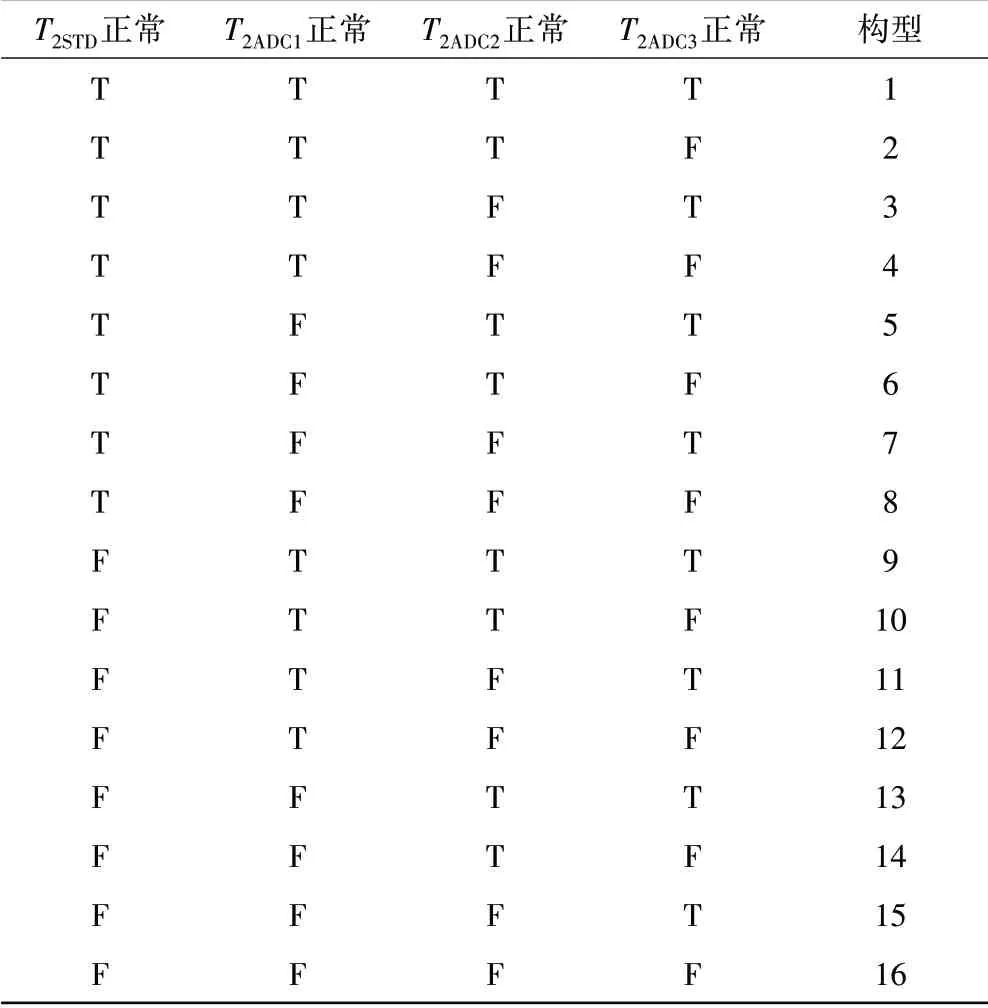
表2 飞发信号状态构型真值
构型2、3、4、5、6、7、8的飞发信号表决结果与构型1的相同,为

构型9为发动机双通道传感器均发生故障,此时丧失基准,根据飞机信号选择,飞发信号的表决结果为

构型10的飞发信号表决结果为

构型11的飞发信号表决结果为

构型12的飞发信号表决结果为
构型13的飞发信号表决结果为

构型14的飞发信号表决结果为

构型15的飞发信号表决结果为
构型16的飞发信号表决结果为
5 仿真
基于上述飞发多余度信号综合表决策略,构建某型飞机发动机全数字仿真模型,本文以全构型下飞机总线信号异常漂移偏大、飞机总线信号异常故障、发动机传感器信号单余度异常漂移偏大为例进行仿真,仿真结果分别见第5.1、5.2、5.3节,另采用某常用的飞发多余度信号综合表决策略进行仿真,仿真结果见第5.4节,并将上述仿真结果与本文提出的综合表决策略进行对比。
5.1 飞机总线信号异常漂移偏大仿真
在全勤构型下,飞机总线信号异常漂移偏大时飞发多余度信号表决仿真结果如图2所示。
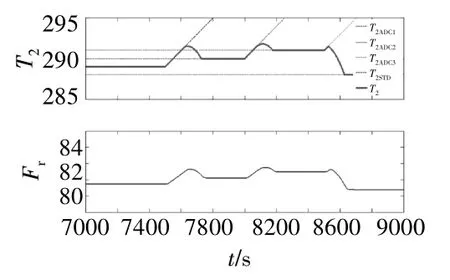
图2 飞机总线信号异常漂移偏大仿真结果
从图中可见:
(1)在7500 s时刻之前的稳定状态下,发动机双通道传感器信号均为288 K(即T2STD=288 K),T2ADC1=289 K,T2ADC2=290 K,T2ADC3=291 K,三者差异均在Δ1内,即加权系数均等于1,表决值T2为T2ADC1,等于289 K;
(2)在7500 s时刻,T2ADC1开始出现异常并向上漂移,T2ADC1在发动机传感器信号Δ1范围内变化时,表决值T2=T2ADC1,超过Δ1时,T2ADC1的权重逐渐变小,直至超过Δ2时权重变为0,此时表决值T2为T2ADC2,等于289 K;
(3)在8000 s时刻,T2ADC2开始出现异常并向上漂移,T2ADC2在发动机传感器信号Δ1范围内变化时,表决值T2等于T2ADC2,超过Δ1时,T2ADC2的权重逐渐变小,直至超过Δ2时权重变为0,此时表决值T2为T2ADC3,等于291 K;
(4)在8500 s时刻,T2ADC3开始出现异常并向上漂移,T2ADC3在发动机传感器信号Δ1范围内变化时,表决值T2等于T2ADC3,超过Δ1时,T2ADC3的权重逐渐变小,直至超过Δ2时权重变为0,此时表决值T2为发动机传感器基准信号288 K。
在整个过程中相应飞机信号出现异常之前,T2表决值为相应的飞机信号,能够有效地保证发动机推力一致性;在T2表决值由飞机信号过渡到发动机基准信号的过程中,发动机推力Fr在81.0%~82.5%之间波动并平滑过渡,满足适航规定中“飞机信号错误时发动机推力变化小于3%”的要求。
5.2 飞机总线信号异常故障仿真
飞机总线信号发生异常故障时飞发多余度信号表决仿真结果如图3所示。
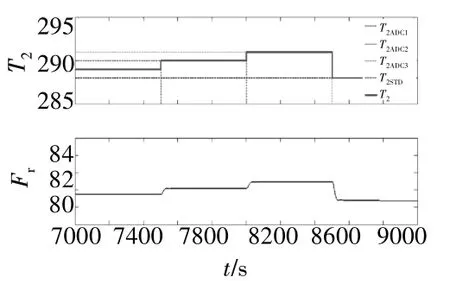
图3 飞机总线信号发生异常故障时仿真结果
从图中可见:
(1)在7500 s时刻之前的稳定状态下,各信号状态同图2,表决值T2为T2ADC1,等于289 K;
(2)在7500 s时刻,T2ADC1发生异常故障,其值阶跃向下,T2ADC1的权重为0,此时表决值T2为T2ADC2,等于289 K;
(3)在8000 s时刻,T2ADC2发生异常故障,其值阶跃向下,T2ADC2的权重为0,此时表决值T2为T2ADC3,等于291 K;
(4)在8500 s时刻,T2ADC3发生异常故障,其值阶跃向下,T2ADC3的权重为0,此时表决值T2为发动机传感器基准信号288 K。
在整个过程中,在某个飞机信号发生故障时,系统能够在健康的飞机、发动机传感器信号中按表决策略选择出最优信号。在飞机信号未完全发生故障前,表决值为相应的飞机信号,能够有效地保证发动机推力一致性,在飞机信号完全发生故障后,表决值为发动机传感器信号,在整个过程中发动机推力Fr在81.0%~82.5%之间波动并平滑过渡,满足适航规定中“飞机信号错误时发动机推力变化小于3%”的要求。
5.3 发动机传感器信号异常漂移偏大仿真
在全勤构型下发动机传感器异常漂移偏大时飞发多余度信号表决仿真结果如图4所示。
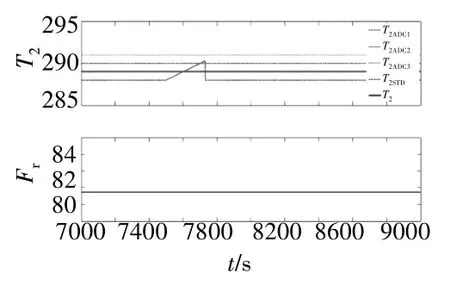
图4 发动机传感器信号异常漂移仿真结果
从图中可见:
(1)在7500 s时刻之前的稳定状态下,各信号状态同图2,表决值T2为T2ADC1,等于289 K;
(2)在7500 s时刻,发动机双余度传感器信号中1余度异常漂移偏大;
(3)在7741 s时刻之前,本通道与对方通道加权系数之和均等于3,选择本通道传感器信号作为T2STD,因此T2STD随本通道异常漂移增大而增大;
(4)在7741 s时刻之后,本通道加权系数之和小于对方通道的,选择对方通道传感器信号作为T2STD。
在整个过程中T2STD与总线信号差异均在Δ1内,始终选择T2ADC1,发动机推力未变化,即单余度传感器信号错误不影响系统控制,表明该表决策略具有容错性能。
5.4 某常用的飞发信号综合表决策略仿真
某常用的飞发信号综合表决策略为飞机信号辅助发动机信号进行表决:当发动机双余度传感器信号差异小于Δ3时,表决值为发动机双余度传感器信号平均值;当发动机双余度传感器信号差异大于Δ3时,表决值为发动机双余度传感器信号中靠近飞机信号(取平均值)的值。以发动机双余度传感器信号中1余度异常漂移偏大进行仿真,仿真结果如图5所示。
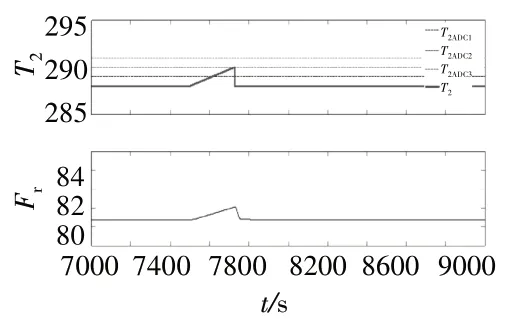
图5 某常用的飞发信号综合表决策略发动机传感器信号异常漂移仿真结果
从图中可见:
(1)在7500 s时刻之前的稳定状态下,各信号状态同图2,其中发动机双余度传感器信号均为288 K,飞机3个大气计算机总温信号平均值为290 K,表决值T2为发动机双余度传感器平均值,即288 K;
(2)从7500 s时刻开始,发动机双余度传感器信号中1余度异常漂移偏大;
(3)在7723 s时刻之前,双余度传感器信号差异小于Δ3,表决值为双余度传感器信号平均值且逐渐增大;
(4)从7723 s时刻开始,双余度传感器信号差异大于Δ3,此时正常余度信号更靠近飞机信号,表决值为正常余度传感器信号值288 K。
在整个过程中表决值出现了2 K的变化,发动机推力Fr变化约为0.7%。
5.5 小结
从第5.1、5.2、5.3节仿真结果可见,本文提出的飞发多余度信号综合表决策略在信号均正常的情况下能够选择同一信号作为表决值,从而有效地保证推力一致性,当飞机总线信号出现异常漂移偏大或故障、发动机传感器信号出现异常漂移偏大时,能够保证发动机推力变化不超过3%。
从第5.4节的仿真结果可见,在正常情况下表决值为发动机传感器信号值,无法保证双发或4发均使用相同的信号进行控制,进而无法保证在相同油门杆角度下双发或4发的推力一致;另外,当发动机传感器单余度出现异常漂移时,发动机推力发生一定程度的变化,而本文提出的飞机发动机多余度信号综合表决策略在该种场景(见第5.3节)下能够保证双发或4发的推力一致且保持不变,具有较强的综合容错性能。
6 结束语
本文设计的飞机发动机多余度信号考虑优先级的加权平均表决策略,以发动机传感器信号为基准计算飞机各信号的加权系数,能够在复杂的多余度信号中表决出1个可靠、准确的信号用于推力控制,满足飞机多台发动机的推力一致性需求;同时在飞机信号出现错误时保证发动机推力变化不超过3%,符合适航要求。