基于红外信标的植保无人机助降系统研究
2022-01-26项立王全辉陈文霞
项立,王全辉,陈文霞
(岭南师范学院信息工程学院,湛江 524000)
0 引言
近年来,中国“新农村”建设越来越受到国家的重视。在“新农村”建设过程中的一个重要内容就是农业生产安全和高效率。喷药作业在农业生产过程中是一个重要的作业项目。人工打农药主要存在以下几个问题。①风险高。每年我国因喷药作业中毒人数高达十万,致死率高[1],这导致年轻人不愿意从事喷药工作。②成本高。以山区柑橘为例,人工喷药成本不低于人民币20元/亩,农忙期可达25元/亩。③残留重。人工喷药采用压力喷头粗犷喷洒,农药浪费严重,并且对土地造成过多的农药残留。④效率低。在病虫害高发期,常出现较大块的面积天天喷药也还赶不上害虫的繁殖速度。相较于传统人工喷药机器,农业植保无人机不但可以有效地提升作业效率,还可以有效地降低人工喷药成本、避免操作人员中毒、减少药物残留,因而受到了农户的广泛欢迎。
据统计,2019年我国植保无人机市场保有量突破4万架,国内研究和开发植保无人机的企业超过200家,比较著名的是大疆和极飞两家企业。大疆作为民用航拍技术和全世界市场份额的领头羊,大疆在植保无人机领域推出MG-1S、T-16等机型[2]。极飞公司的P40、P20等植保无人机,也拥有大量的市场份额。植保无人机在普通农业植保领域已经取得了较多的成就,无人机植保技术在我国水稻、棉花、辣椒等低矮作物总作业面积突破4亿亩次。但形成鲜明对比的是,无人机保值技术在市场保有量高达1.67亿亩的高植株果树的实际作业量少到可忽略不计,同时针对高植株植物(柑橘等果树)喷药作业的植保无人机研究相对匮乏。不同于平原的无人机喷药,大量高植株植物生长于坡地,适合植保无人机的起降区域相当小,稍不注意就会因降落失败而炸机,造成严重损失。植保无人机坡地定点降落问题是一个亟待研究的问题。
无人机常用的定点降落方法主要有:基于全球定位系统GPS的定点降落和机器视觉辅助的定点降落等[3]。基于GPS的定点降落依托于GPS记录无人机起飞点的经纬度的一键返航。无人机规划飞行路径并实时获取中途位置点的坐标,形成飞行路径信息,接收到返回指令后进行返航。然而,GPS定位精度低,无人机较难精准定位起飞点,从而很难进行自动精准降落,在某些特殊情况下可能会因为降落点偏离起飞点,造成事故。无人机降落到一定高度后加入人工干预,可实现安全降落,但是这种方法对植保无人机操作员的要求比较高。植保无人机体积庞大,对降落要求很高,稍不注意,几万元的无人机就可能毁于一旦。此外,使用GPS实现无人机定点降落结构简单,功耗低,但对算法的要求较高,且必须借助卫星进行定位,容易受到外界信号的干扰,定位精度不高,存在局限性。当前还有一部分植保无人机采用全称实时动态载波相位差分定位技术(RTK)定位,其动态定位效果不理想且要额外增加很高的RTK定位基站成本。机器视觉辅助进行的定点降落用GPS粗定位与运动检测技术定位相结合的方法。将摄像头置于无人机起飞点处,通过摄像头获取无人机的位置,然后发送命令来控制无人机运动[4]。通过采用无人机双摄像头和惯性导航系统,采用光流传感器和惯性测量模块定位的方法来提高无人机的定位精度[5]。扩展卡尔曼算法也用于无人机定位,但需安置摄像头等或需要较复杂的光流计算且实施起来较为复杂[6]。对于植保无人机而言,这些方法适用性不高[3]。植保无人机发动机功率大,在下降过程中扬起的大量沙尘以及现场喷药产生的部分烟雾,使得图像识别摄像头容易被遮挡;设置的纸质或布制降落靶标也经常被巨大的气流吹飞或被砂石遮挡,采用不易吹飞的靶标不易携带。文献[7]提出利用紫外光散射通信、无背景噪声干扰的优势搭建基于紫外信标的无人机助降系统,实现无人机高精度助降引导,但是该系统结构较为复杂,成本偏高。
可以看出,上述种种无人机辅助降落方式都存在一定缺陷,并不适用于高植株植保无人机降落,为此本文提出了一套能够满足植保无人机在坡地自动降落过程中的定位方案,该方案通过减小着陆过程中的定位误差,使植保无人机获得更准确的位置信息,实现精确着陆,从而使植保无人机更加适用于高植株作物的喷药作业。
1 植保无人机
植保无人机由飞控系统、毫米波雷达、螺旋桨、电机、地面云台、电池、喷洒作业的喷嘴、载药桶等及其他部件组成。自制植保无人机如图1所示。

图1 自制植保无人机
植保无人机的工作环境复杂,尤其是应用于坡地高植株作物,如柑橘等。这种工作场景地形复杂,可供长度近2米的植保无人机起降的区域较小。其具体应用场景如图2所示。本文主要研究植保无人机的自动降落装置。

图2 植保无人机用于高植株作物的应用场景
2 助降系统硬件设计
植保无人机助降系统的硬件由三部分组成:①地面的红外线发射装置(红外信标),放置在无人机将要降落的地点。②搭载在无人机上的红外接收机载装置,在无人机接收到红外信标的红外信号后,与地面控制中心结合无人机的俯仰角度对无人机的位置进行调整,然后开始降落。③蓝牙传输装置,蓝牙模块(包括蓝牙发送模块和蓝牙接收模块)选取HC-05模块,HC05的主要优势是集成度高、使用灵活、成本低。具体实现如图2所示。下面对红外接收机载装置和红外线发射装置进行详细介绍。
2.1 红外线发射装置
红外发射装置主要包括:采用STC15作为微控制器、外接大功率红外发射模块、电源部分、声光提示电路等。STC15具有性能高、便于操作、经济适用等优点,本文选用的STC15W4K48S4型号属于STC15芯片中的加强型,是同类芯片中性能较高的。简单来说,红外发射装置通过红外发射器构成的红外信标不断发射信号。电源部分为无人机发射信号过程的稳压电源取样基准,稳压器根据电压来识别输出电压的高低从而进行自动调节。发射器由大功率红外发射模块构成,其电路如图3所示。

图3 红外发射模块电路原理
此发射模块由多个红外管连接而成,其功率较大。微控制器STC15以38 kHz的频率调制发射“5A”的规定数据,通过红外发射管将数据发射出去。红外线发射装置的内部结构如图4所示,整体外观如图5所示。

图4 红外发射装置内部结构

图5 红外发射装置整体外观
2.2 红外接收装置
本次接收站选用STC89C52型号主芯片来处理信号,多个红外接收探头排列分布。接收器为圆形,圆周上设置了多个红外接收器,并且特意装设一个红外接收器位于圆中心。只有当所有接收器都接收到红外信标的红外发射信号,即无人机位于信标正上方时,无人机才会开启自动降落动作,如图2所示。很容易的发现,无人机降落的准确精度由接收站上的红外接收器决定,红外接收器越多,则可参照的方位点越多,更能减少降落误差。本设计设置了代表东、南、西、北、中等9个方向的接收器,如图6所示。
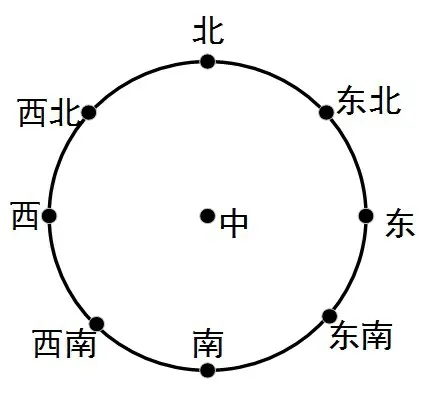
图6 红外接收装置9个方向
红外接收电路的作用是将地面红外信标发射红外线的信号通过串行数据转换为字节,供并行数据的器件使用,也就是将无人机的发射信号情况读入芯片,并将其信息录入,经过进一步处理,成为为后续传输给蓝牙模块获得反馈信息的重要电路。因为设计选取了不同的方位进行发射,所以将多个串口电路并联,其各部分的RxD和TxD引脚接在对应的芯片上。植保无人机红外接收装置总共9个红外接收管,按不同方向安装,接收特定方向的信号,如图8所示。信号经二片74LS151多选一输出后,由微控制器扫描哪些接收头接收到“5A”信号。微控制器经过扫描确定是哪一个接收头接收到了信号,可以判断出来无人机与红外信标相对的方位。红外接收装置的整体外观如图9所示。
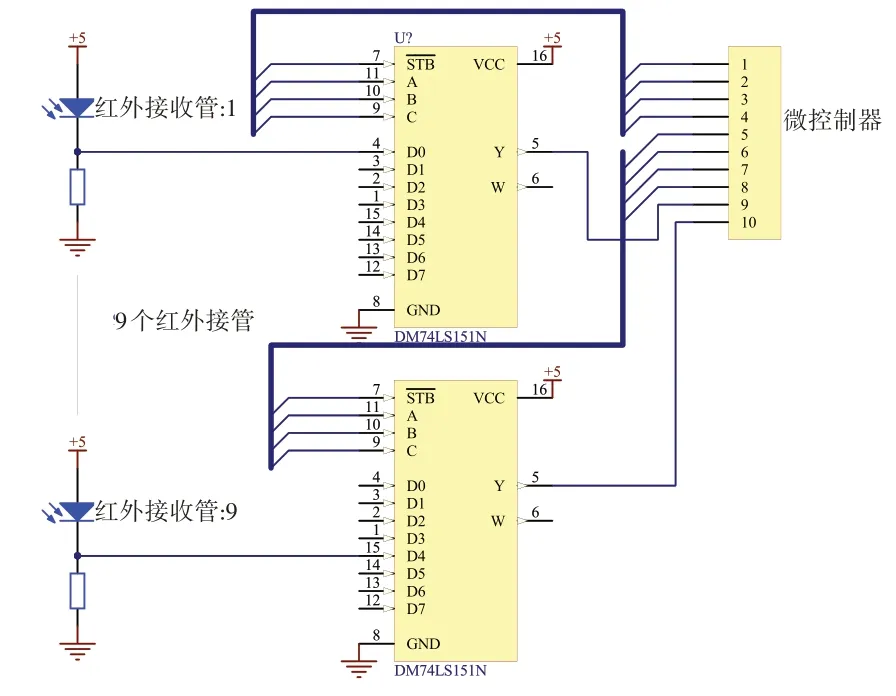
图7 红外接收电路原理

图8 红外接收端内部

图9 红外接收端外观
3 系统软件设计
植保无人机的软件系统比较复杂,主要包括飞行主控模块、农药喷洒模块、飞行避障算法模块、起飞和降落模块等。降落算法的基本流程是:无人机在GPS定位辅助下,飞回起距降落点半径15 m,高度15 m区域内(由机载毫米波雷达定高)。如果能接收到地面发射的红外信号,就进入引导模式。根据红外接收头不同管子接收到的信号及实际离地高度,计算出离真实降落点的方向和距离,从而调整无人机在空中的位置,直到飞到正上方为止。其中由于无人机飞行中自身姿态并非水平,所以需要调用倾斜角经卡尔曼滤波后,补偿计算误差。在正发射器正上方后开始下降,下降过程中受风速影响会偏离中心点,所以需要边下降边补偿,直至在目标点上空3 m处作精确校准,最后直接降落。
将红外接收机载设备搭载于无人机上,一切前期准备工作就绪后,初始化发射模块,使其发射一个频率为38 kHz的红外线,并让无人机正常起飞。红外接收器的接收红外线频率为38 kHz,为了使红外线能正常收发,发射模块与接收模块的红外频率必须保持一致,也就是红外信标上的STC15W4K48S4芯片需要控制发射模块发射出38 kHz的“5A”信号。遥控无人机飞到接收站上方3~4 m的高度,等待地面接收站接收机载设备发出的红外信号。若机载设备上的蓝牙设备接收到地面接收站的回传信号后,会在内部进行一个判定,即发射的红外线是否已经被接收站上所有的接收器接收。若没有,则通过回传的方位信号进行无人机的调整。由于无人机上的开发平台有较开放的通信协议,无人机降落前的方位校准可以依靠芯片控制无人机的飞行控制器来实现。直至无人机位于接收站的正上方,即表示定位准确,无人机可以执行自动降落命令。发射机和控制器的具体实现过程如图10所示,接收机的具体实现过程如图11所示。

图10 发射机和控制器软件系统设计

图11 接收机软件系统设计
4 系统实验
无人机进行自动降落的整个过程中,通过终端显示数据信息进行记录。当无人机降落至地面关闭电机,停止旋转,则降落成功。降落过程记录的数据通过串口线连接电脑,把这些数据上传至电脑,用电脑处理分析降落数据。测试结果是:本文设计的无人机在各种不同高度下进行降落测试,都能够成功安全降落,没有出现坠机现象,降落过程机体能够保持平稳,没有出现较大的姿态变化,无人机着陆后能够自动关闭电机停止旋转。整个测试过程都没有出现无人机异常现象。选取了不同高度下无人机的降落情况5次,具体如表1所示。
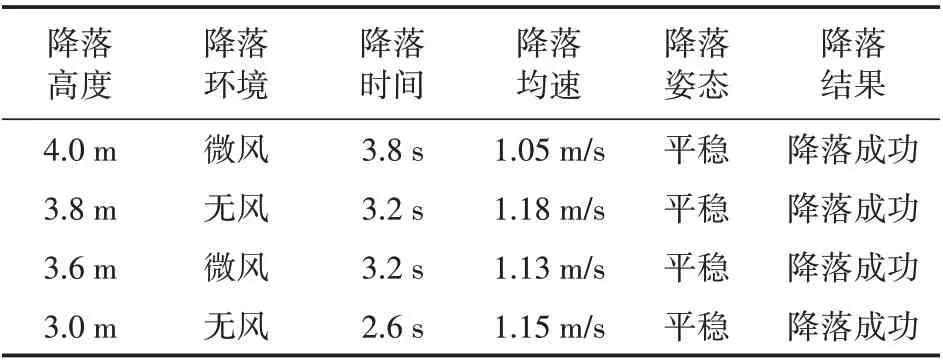
表1 降落性能效果
接收站有9个外接收器,分别代表9个方位,具体分布如图9所示。以接收站中心的接收器为准,即代表方位为中处的红外接收器,设此坐标为A(X,Y)。以无人机实际降落的位置为准,取中间的发射器的实际位置为a(x,y),以cm为误差单位,横坐标表示无人机向东西方向偏移,纵坐标表示无人机向南北方向偏移,将A和a之间的直线距离定为误差距离。在确保周围环境无风的情况下,将接收站位置A与降落位置a的坐标绘制成降落误差对比图,测得数据入图12所示。
由图12和表1可得,在无风环境下,无人机实际降落位置与接收站位置之间的距离在5 cm左右,此误差很小,在合理的范围之内。出现此误差的可能因素是无人机自身降落过程中出现了机身偏移,以及记录测量数据过程中的细小出入。
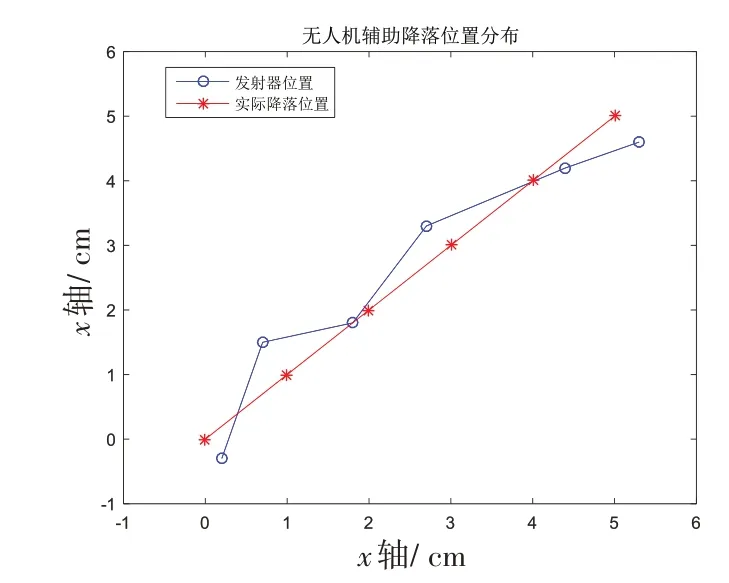
图12 植保无人机降落误差分布
通过上述实验表明,本文设计的无人机自动降落控制系统能够控制无人机安全、稳定、快速自动降落,并且将实际降落位置的误差尽可能减小,所以本文研究的自动降落算法具有可行性和稳定性,达到了设计要求。
5 结语
本文研究植保无人机的红外信标的助降系统,研究其机载红外接收器、红外信标、监控模块等硬件部分,以及相应的软件。选用配合红外发射和接收组件,搭载在无人机上,利用地面接收站与无人机上的红外接收器进行对接传输信号,实现无人机自动降落的误差补偿方案。在今后工作中,需要进一步改进设计加强其可靠性、安全性、准确性。无人机的降落误差补偿可结合多传感器技术进行相应加强,以达到更好地缩小误差,例如结合超宽带技术和蓝牙5.0就能实现更好地缩小误差。应对多架无人机同时降落,助降系统还计划运用固态激光雷达来实现。
