全地形果园仿形弥雾机器人的设计
2022-01-25郭建康李彦沛李亚芹谈桂秀蒲岩岩王超鹏
郭建康,李彦沛,李亚芹,谈桂秀,蒲岩岩,王超鹏
(1.佳木斯大学 机械工程学院,黑龙江 佳木斯 154000;2.佳木斯大学 现代教育技术中心,黑龙江 佳木斯 154000)
0 引言
针对果树冠层厚、叶片密等特点,当下自动化果园中的主要做法是在自走式喷药小车中加入超声波传感器并监测当前对靶向是否有目标,当检测到空挡时关停液泵以减少药液浪费。本方案通过分析影响风场分布和喷雾效果的各种因素,根据传感器对于果树的实时测绘取得的冠层厚度数据,通过改变喷雾各种技术参数并监测喷雾覆盖和雾滴的漂移量以达到最佳作业效果。采用伸缩轮履可切换式行走结构,使弥雾机器人可适应果园内复杂的地形结构。
1 数字波束形成技术
数字波束形成(DBF)技术是一种基于空间三维扫描的数字成像技术,通过自适应地发射波束可实现空域点云图像采集,通过控制多个独立可控波束的形成达到可控信噪比(图1)。使用数字波束成像技术利用了波束特性可由矢量控制的特点,实现在作业中灵活可变的测绘模式切换目的。使用数字波束形成技术对果树进行成像,可以有效探测并生成果树的三维尺寸,为仿形弥雾作业提供数据支持。
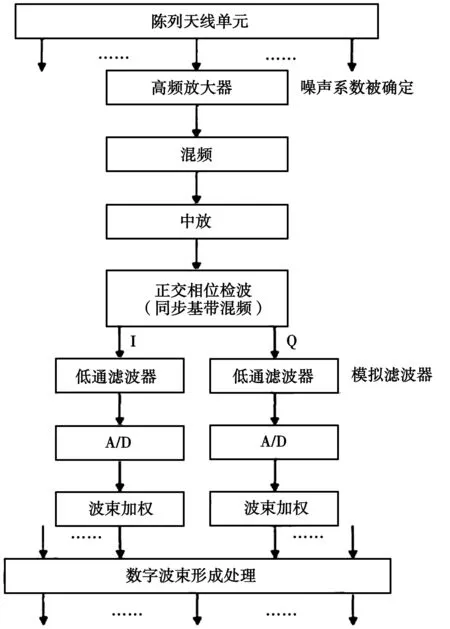
图1 相控阵雷达接收信号进行波束处理
数据处理系统使用的是一块高速信号处理板,包含8路10 bits的AD转换器,一片FPGA,一块10 bits的DA转换芯片。在这个系统中,分别设计了软件与硬件部分。在硬件方面,各通道在FPGA的控制下进行数据测量,完成对由SHA模拟中频输入接口送来的中顿信号进行模数转换,形成8路数据流送入FPGA,在FPGA中完成数字正交解调、8路单波束DBP处理、脉冲压缩处理,形成双路的数字I/O信号,经过求模,形成单路的数字视频信号,送给DA芯片[1]。
在DBF体制雷达硬件结构里(图2),每个模块含有一个阵列天线,天线的每个单元接收的射频(RF)信号由集成在硬件中的A/D变换器分别进行模数转换,由中央处理器将得到的数据进行变频与同步检波处理后放在内存中,图像运算单元对其进行正交基带信号处理,处理后的复基带数字信号S与预定的复加权矢量W再次交由图像处理器进行相乘累加后,根据训练的图像模型进行三维点云图的输出[2]。
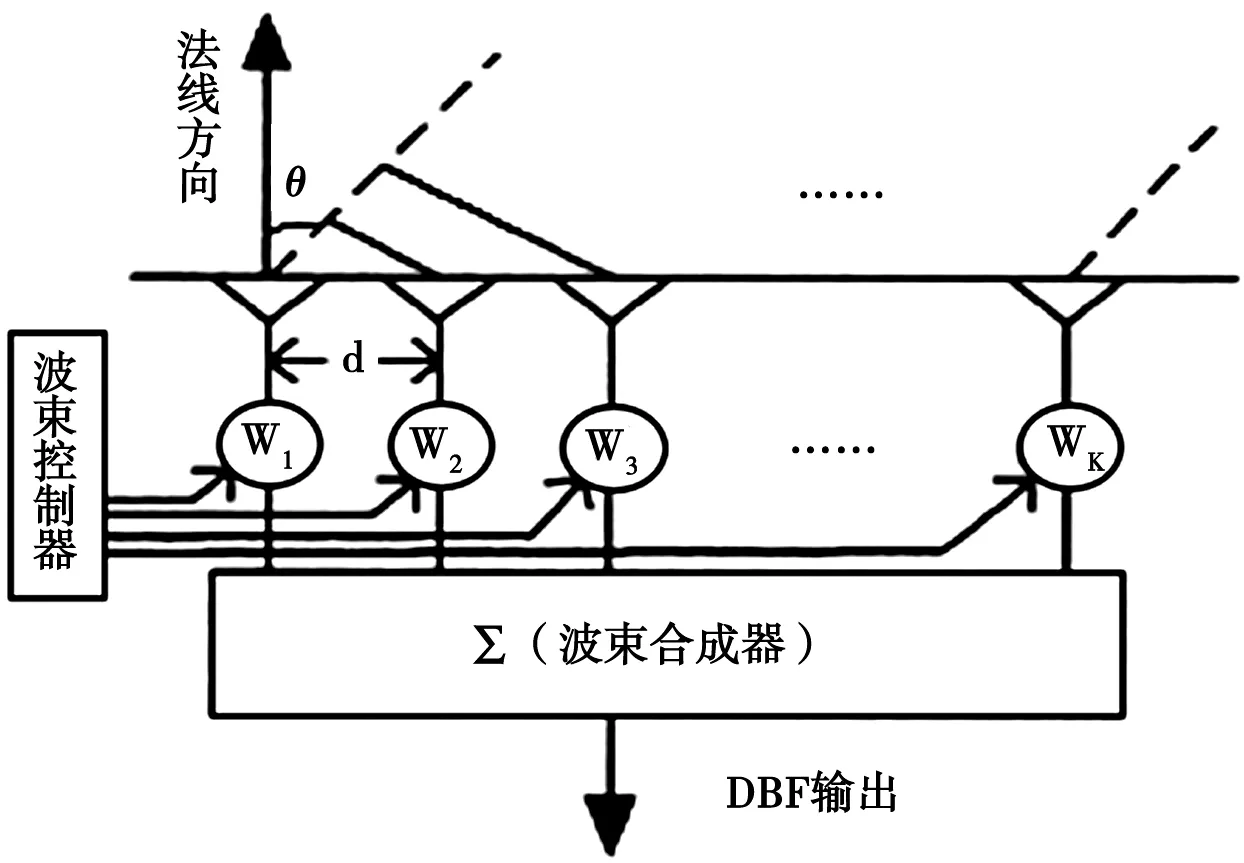
图2 简化的面阵波束合成器
2 静电弥雾
弥雾部分结构由空气压缩机、柱塞泵、药箱、控制电磁阀、静电发生器、喷头、风机、机架等组成,风量的确定遵循置换原则,原理为风机吹出的气流完全置换风机前方到果树空间的空气,所述风量应大于其置换的空气气量,公式如下
Q>2vHLK
(1)
式中Q—末端送风机的风量,m3·h-1;
v—静电弥雾机的行驶速度,m·s-1;
H—数字成像雷达所测定的果树高度,m;
L—数字成像雷达所测定的距离果树的点对点距离,m;
K—实验室测定的空气中气流的衰减和沿途的气流损失的系数。
在实际作业中,风压也是影响弥雾作业效果的重要因素(静压损失忽略不计),计算公式如下
Pd=ρ·v2/2
(2)
Pj=ζρ·v2/2
(3)
P=Pd+Pj
(4)
式中P—系统输出的总压,Pa;
Pd—系统内部动压损失,Pa;
Pj—体统局部动压损失,Pa;
ρ—标准大气密度,kg·m-3;
v—出口风速,m·s-1;
ζ—局部阻力系数;
静电弥雾发生部分以蓄电池为电源,选用50~100 kV的高压静电为静电系统工作电压,为了防止因高压静电发生器出现不良情况,每个喷头单独配有一个高压静电发生器。静电系统通过开关控制电磁阀和静电发生器工作。喷雾作业时需闭合静电发生器控制开关、中间喷雾控制开关和左或右喷雾控制开关,从而实现分段、独立喷雾,防止农药的浪费[3]。
3 流量控制
静电弥雾系统的流量采用变量控制,流量控制系统应用脉宽调制技术,通过控制液泵的输入功率改变喷洒管道压力从而控制流量。同时,采用Abaqus有限元分析软件对多旋翼植保无人机变量喷洒系统的关键受力部件进行线性静力分析,确保流量控制系统结构稳定。
硬件方面采用STC15F104W单片机作为控制核心,通过控制液泵电机转速实现控制喷洒流量。水泵使用无刷隔膜液泵,该系统由控制核心、液泵驱动电路及 UBEC这 3 部分组成。控制核心接收到接收机发出的控制信号后,将接收到的信号转换为 PWM 信号发送至液泵驱动电路,最终控制液泵电机输出功率,实现变量控制流量的功能。UBEC为无刷电机的电源控制电路,主要用于将锂电池提供的高压直流电源转换为单片机和接收机可以使用的低压直流电源[4]。系统框图如图3所示。
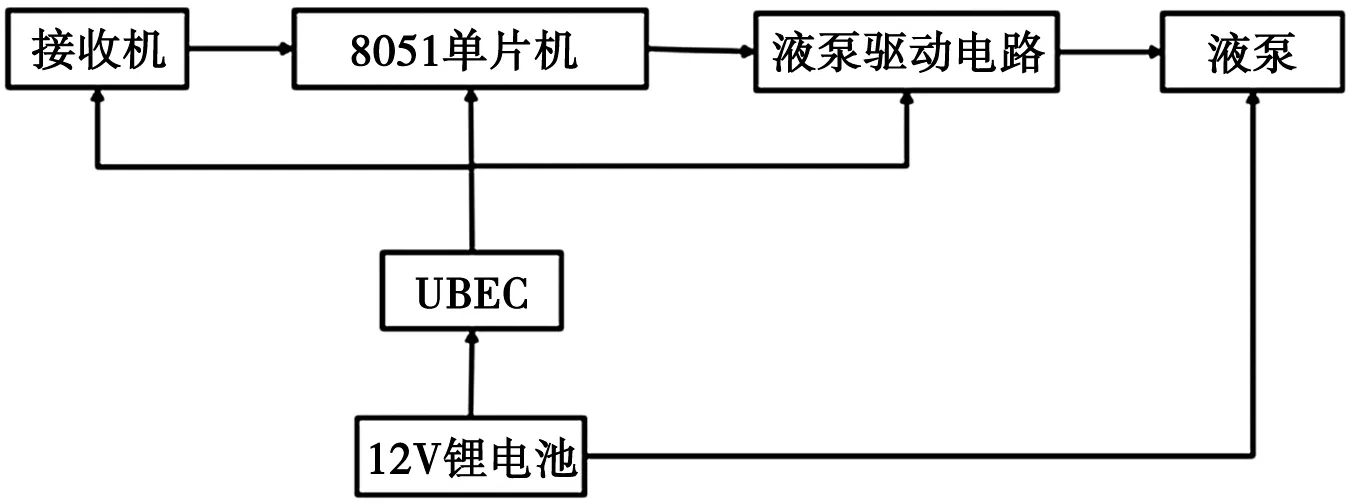
图3 变量喷洒系统框图
软件方面,系统通过读取上位机输出的PWM信号并进行信号判断,当输入脉宽等于 1 ms 时,即控制端摇杆处于最低位时,变量喷洒控制系统开启; 否则,系统将重新进入输入信号判断。
由电路原理知,在控制端油门大于10%时所输出的电压才足以使水泵启动。因此,在变量控制系统开启之后,当输入脉宽大于1.1 ms(即控制端油门大于10%)时,根据输入信号计算出对应输出PWM并循环该步骤;否则,重新进入输入信号判断步骤。
4 仿形风送
通过数字波束形成技术,实时采集果树的三维深度信息,并对喷口的流量进行实时调整,达到仿形弥雾的效果。系统通过数字成像雷达进行点云成像,并根据点云图拟合出果树冠层图像模型,根据模型进行取点测距。信号转换电路将数字电路计算出的信号转换为微控制器可识别的模拟信号,单片机对信号进行判断与加权后根据实际情况打开或关闭电磁阀,调节水泵驱动信号,喷头组件开始喷雾并根据深度信息实时调节流量。仿形弥雾系统解决了液滴漂移等复杂问题,实现了果园植保技术一体化革新。
5 可切换式轮履复合结构
本机采用伸缩式轮履可切换式行走结构,使弥雾机器人可适应果园内复杂的地形结构(图4)。轮履复合结构的切换由驱动液压油缸实现。在机器人主体与轮式机构的连接架两侧布置两个液压油缸,分别驱动伸缩式轮式行走机构的收起离地和下放接地。经计算,使用液压油缸作为切换动力的液压系统的工作压力应大于25 MPa。在平地行驶中轮式机构工作下置时履带最小离地高度达到越野车辆中等越野能力水平(≥185 mm), 液压油缸与水平面夹角θ=17.5°。轮履切换系统既可以由操作者根据果园路面手动控制切换,也可以由果园仿形弥雾机器人根据视觉识别系统与压力传感器识别路面情况,传至中央总控制模块,由控制模块输出电平控制自行切换。
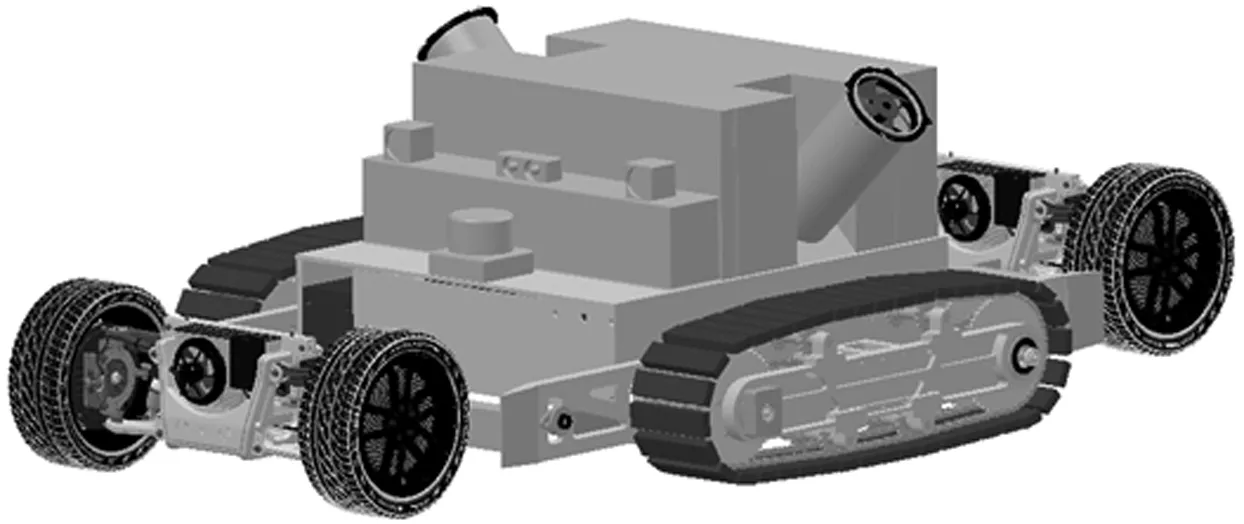
图4 整车结构示意图
全车车轮部分选用大功率轮毂电机为驱动力。由于整机重量在药液满载时大于 60 kg故选择了单个功率为0.5 kW的伺服轮毂电机如图5所示。其额定电压为24 V,电机最大横向尺寸为 119.1 mm。动力电池组包括8个电池包,两个一组并配有悬挂,布置于施药机器人储药箱下方电池仓。
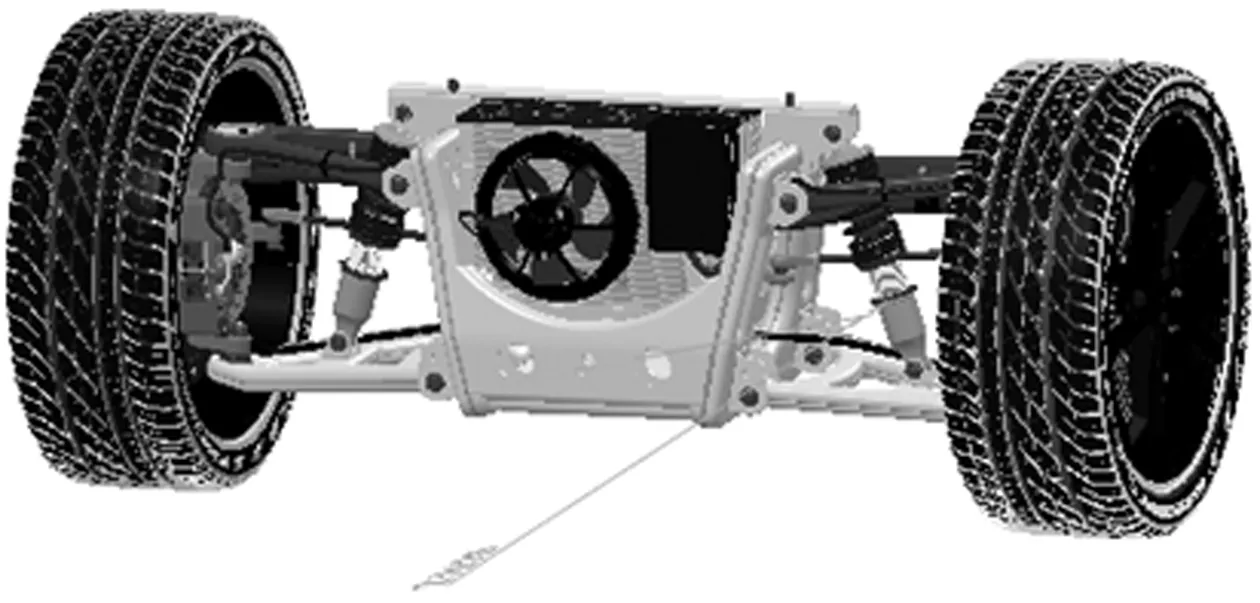
图5 轮毂电机及悬架部分
6 结论
通过数字成像雷达获取实时作业果树的深度图像信息,并根据当前行进速度调节药液流量,所搭载的静电弥雾系统将药液雾化成100 μm左右的雾滴,通过静电吸附防漂移实现分段、独立弥雾的多种作业模式。仿形弥雾计算系统通过数字成像雷达获得的果树冠层厚度的深度信息,实时调节各喷嘴流量实现变量喷撒大大提升了作业效果,有效提升了雾滴的附着率,防止雾滴的飘移,实现了果园植保一体化革新,具有极强的推广价值。
(03)
