基于SLAM与声源定位的农业大棚服务系统
2022-01-25方言海李彦沛李亚芹谈桂秀黄一博马悦轩
方言海,李彦沛,李亚芹,谈桂秀,黄 玉,黄一博,马悦轩
(1.佳木斯大学 机械工程学院,黑龙江 佳木斯 154007;2.佳木斯大学 现代教育技术中心,黑龙江 佳木斯 154007)
0 引言
随着我国当前农业机械化的发展与居民消费水平的提高,大家对新鲜农产品的需求层次也越来越高,绿色、安全、优质的农产品成为了农业发展的优先词。农作物的生长需适宜的土壤条件与气候条件,一些特殊的农产品只能在特定的季节才能生产。在地域与气候条件上,我国是一个受资源约束较大的国家,南方气候温暖但土壤条件较差,北方土壤条件适宜但气候水平较差。在此基础上温室大棚的发展优势逐渐显著,但传统温室大棚在管理上存在劳动强度大、监管效率低、经济效益差等问题,难以适应经济社会发展和满足人们对农作物的需求。因此一种运用先进技术的自动巡检服务机器人应运而生。
1 系统模块
1.1 视觉SLAM技术
视觉SLAM,即VSLAM。如图1所示,是现在正在新兴发展的SLAM技术,利用单目、鱼眼相机,多帧图像自我判定位置和地形变化,实时进行地图构建来完成对于地形的分析。

图1 视觉SLAM(VSLAM)成像效果图
1.2 场景感知
主要利用近红外激光器,将激光器产生的具有一定结构特征的光线通过镜片组放大透视并投射到被拍摄物体上,再由专门的红外摄像头进行采集,效果如图2所示。被摄物体会因这种一定结构特征的光线的投射,根据被摄物体自身纹理不同,会呈现出深浅不一的图像相位信息,然后这些特征由操作单元转换成深度信息,获得三维结构。即通过光学手段获取被拍摄物体的三维结构,再将获取到的信息进行更深入的应用。

图2 场景感知效果图
1.3 声源定位
基于阵列的声源定位是利用声音传输信号的关键技术,其目的是通过声音信号来确定声源的三维坐标信息。而VSLAM技术搭配麦克风可以提取语义信息,更加人性化。现在国际上高精度地图构建都包含着大量的语义信息,对于语义信息的提取和识别成为了室内地图构建技术发展的重点要素。丰富的语义信息更有利于对于声源信息的分析,完善实时地图构建。
声源定位由超声波模块、声音接收处理单元、光电传感器3个模块组成,声音接收处理单元结构分布模型如图3所示。超声波模块由发射和接收两部分组成,用于探测障碍物的距离[1]。语音接收处理单元主要用于语音预处理。语音信号预处理一般包括高级滤波、加权、加窗等,光电传感器主要用于避免光的干扰和感知物体的接近。
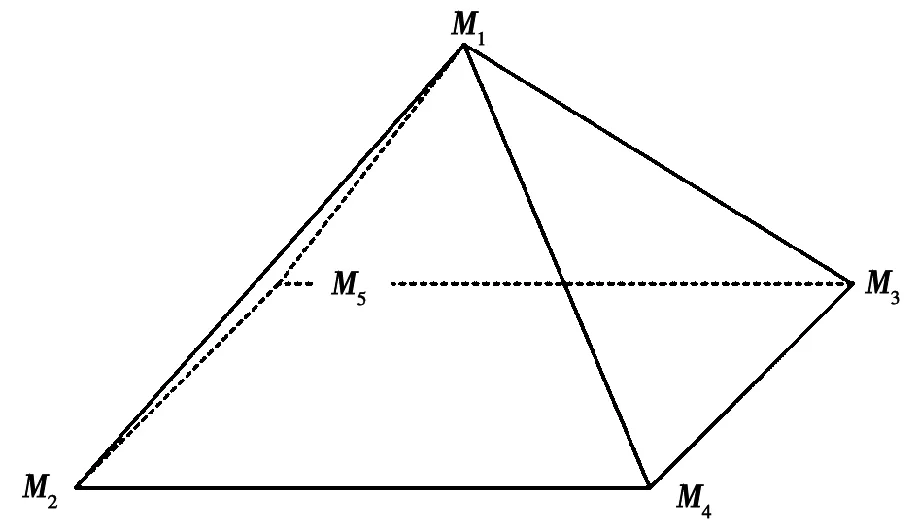
图3 声音接收处理单元结构模型
1.4 定位模块
针对农业大棚的作业特点设计了一套自动巡线重复作业系统,以实现重复的农业检测功能。针对大棚有遮挡,定位易漂移的问题使用了一套抗干扰稳定性强的定位方案及RTK定位,RTK的组合定位算法示意图如图4所示。RTK即载波相位差分技术,将基准站采集的载波相位发给农业大棚服务机器人接收机进行求差,从而解算坐标[2]。载波相位差分技术得到的定位精度为厘米级,相对传动GPS定位方案精度有了极大地提升。该系统搭载RTK定位系统后,可以精确记录作业轨迹,实时校准并能精确完成续航作业。
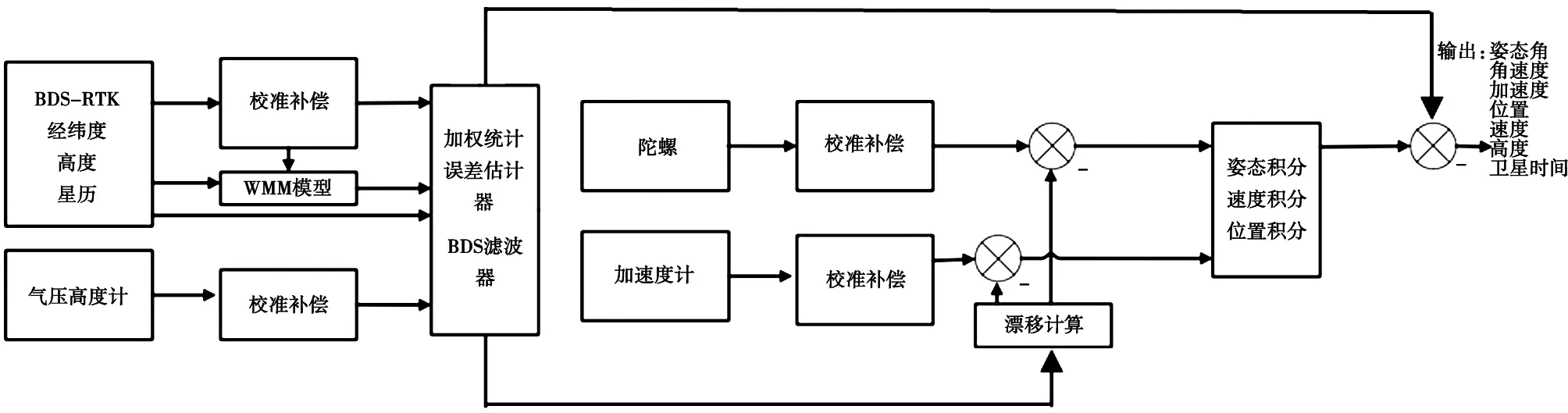
图4 基于RTK的组合定位算法示意图
2 实时地图构建
在研究的农业大棚的二维未知地图的环境下,SLAM技术中使用的主要设备是摄像机,其中核心为视觉同步定位和实时制图。
根据面临的环境不同,地图的表示方法通常由位置和地图创建的环境模型构成,可分为占据栅格地图模型、几何地图模型以及拓扑地图模型三种类型[3]。
2.1 占据栅格地图
栅格地图是对周围环境的离散表示,它的思想是将移动机器人的环境划分成大小相等的网格[4],每个网格的状态用来描述网格被障碍物占用或不被障碍物占用的概率。占据栅格地图具有创建简单、易于维护和理解、便于多传感器信息融合等优点,此方案可以帮助农业大棚自动机器人方便地完成定位和路径规划,在移动机器人研究中得到广泛的应用。
2.2 几何地图
农业大棚无人机器人依靠自身所搭载的外部传感器获取大棚内的环境信息,从传感器数据中提取更抽象的几何特征来表示环境,这种地图称为几何地图或特征地图。作为特征标识实现移动机器人的定位与地图构建。几何地图能为机器人定位和路径规划提供所需要的度量信息,且这种地图更加紧凑。
2.3 拓扑地图
拓扑地图用图的形式表示机器人工作环境。其中表示地图中节点的集合节点对应环境中的典型特征或区域表示节点之间连接边的集合与连接边对应节点之间的相互关系。拓扑地图可以保证地图空间的连贯性,需要的存储空间小利于高效率的路径规划,适合在大范围环境中应用。但是由于拓扑地图缺少精确的环境信息,不能用于机器人精确定位并且在动态环境和环形区域环境中的构建和维护拓扑均比较困难。
2.4 图像融合算法
图像融合是将农业大棚服务机器人所携带的深度相机所拍摄到的路面深度信息及彩色相机拍摄到的周边作物信息进行图像融合,利用图像内特征识别判断周围环境信息即农作物情况及环境信息,判断巡线情况与农作物长势监测;深度相机拍摄的路面信息根据起伏信息进行色块标记,对低洼地区及起伏遮挡进行评估,评价通过性。同时对图像进行像素级的融合,融合后的图像包含了所需的环境信息及周边作物信息[5]。
3 变量喷洒
变量喷洒技术是根据数据融合系统生成的当前作业场景的三维数据并计算出的最佳施药用量进行变量喷洒的实用技术。该系统主要利用神经网络模型对无刷隔离膜水泵这一滞后控制系统进行实时PID流量控制的深度学习,变量喷洒控制系统硬件原理图如图5所示。系统会根据传感器系统采集到的靶向数据进行分析,计算出合理的用药量同时根据标靶所处的位置,根据模型计算出合理的液滴飘移范围,从而实现精准施药。依据变量算法求得与当前作物长势拟合的风量和施药量,调节电机和电磁阀的脉宽调制信号以实时调节液泵转速和喷头流量实时调节。
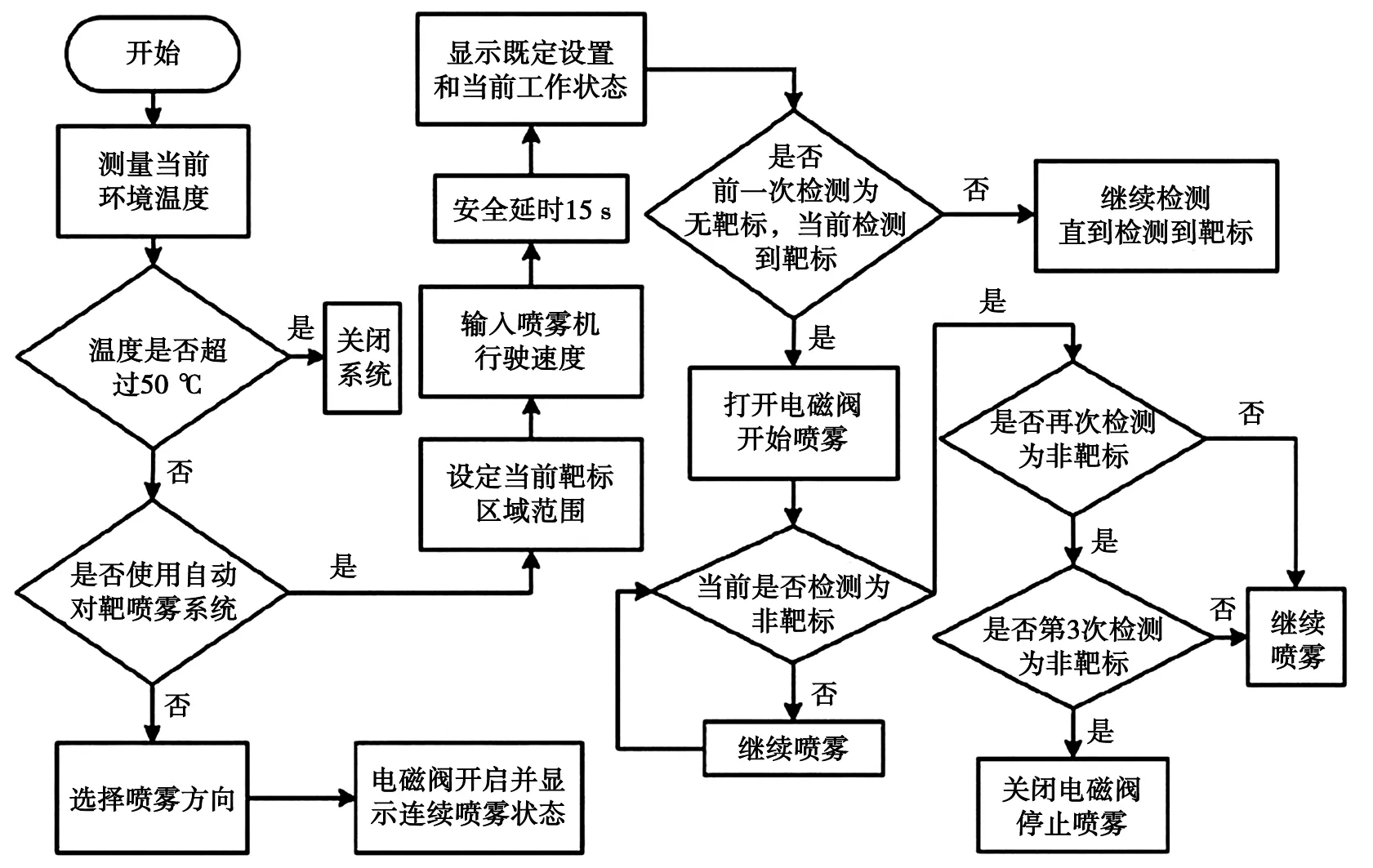
图5 变量喷洒控制系统硬件原理图
4 结论
本文设计了一种针对农业大棚巡检与植保维护的服务系统,在传统SLAM与声源定位的基础上引入数据融合方案,通过实时地图场景构建系统将相机、近红外激光器、音源采集装置、超声波及其他外围传感器所采集到的农业大棚中的特征数据进行数据融合,并根据当前数据特征利用地图构建法进行实时构建。此方案解决了自动巡检机器人需要导航或大量标定节点的方案,实现了农业大棚巡检与植保维护的无人化,大大提升效率并节约人力。
(05)
