电子真空助力器控制系统及方法
2022-01-14侯聪闻柳恩芬张世强单国志
侯聪闻,柳恩芬,张世强,单国志,宋 巍,成 功,石 强
(吉林东光奥威汽车制动系统有限公司 研发部中心,长春130012)
0 引 言
随着汽车技术的发展,无人驾驶成为新的发展趋势,使人们出行更加快捷、方便,而对新能源车和传统燃油汽车,刹车制动执行机构是必须具备的功能之一。电子真空助力器[1-3]作为汽车智能驾驶、无人驾驶或AEB(Autonomous Emergency Braking)制动执行机构,并提供制动,同时要求电子真空助力器必须保证安全、可靠实现制动或使车辆停止。在车辆行驶中,若处于无人驾驶或AEB模式时,要想实现车辆制动减速或停车,需要电子真空助力器主动制动或人踩电子真空助力器制动时输出液压力,通过液压管路连接制动卡钳,液压力推动卡钳加紧制动盘,从而实现车辆减速或停止。电子真空助力器控制系统及温度模块控制系统起关键作用,控制系统解决电磁阀控制,实现真空腔和大气腔两腔压差,实现主动增压[4-5];温度模块解决汽车无人或智能驾驶时,长时间主动制动或下坡主动制动情况下,使电磁阀的温度升高,驱动电路减小,导致控制电磁阀无法打开,引起制动力不足或制动失效等问题。
笔者提出一种解决电子真空助力器主动刹车控制方法,为汽车无人驾驶、智能驾驶提供刹车制动。在电子真空助力器长时间主动制动时,电磁阀温度升到160℃以上,则电磁力衰退,电磁阀逐渐向后回退,导致电子真空助力器主动制动主缸压力逐渐减小,即汽车主动制动衰减或失效。为解决制动衰减,使用笔者温度模型和控制系统,其工作原理为整车控制器的电控单位根据需求,命令电子真空助力器主动制动,电子真空助力器电控单元接收到命令后,控制电子真空助力器实现主动制动。由于路况或工况不同,正在行驶智能汽车(或无人驾驶汽车)处于长时间制动或下坡制动状态,温度模型电路实时采集反馈电流和压力,然后传送给电磁阀温度模块算法,温度模块根据时间、电流、温度插值表算出最终值,传送给控制系统,控制系统通过优化制动压力算法,执行制动并报警。实现汽车自动减速或停止功能。电子真空助力器也可以人踩制动踏板实现制动[6]。
1 制动工作原理
电子真空助力器在整车布置如图1所示。工作原理是,电子控制单元接收到制动命令(或人踩制动踏板)后,通过真空罐、真空泵控制器和真空泵提供真空源给电子真空助力器产生液压力,液压力通过制动管路传输到前右车轮、电子控制单元、后右车轮和后左车轮卡钳[7]使车辆减速或停止。

图1 电子真空助力器在整车布置Fig.1 Layout of electronic vacuum booster in the whole vehicle
图1中,1为真空罐,2为电子真空助力器,3为前右车轮,4为电子控制单元,5为后右车轮,6为后左车轮,7为上电开关,8为制动踏板,9为前左车轮卡钳,10为真空泵,11为真空泵控制器,12为制动管路。
2 控制器工作原理图
控制器工作原理图如图2所示。电控单元控制器工作过程为电池提供电压(12 V),经过保险丝,其中一部分输入给电压转换和监控芯片模块,通过电源安全控制模块降压至5 V和3.3 V,为MCU(Microcontroller Unit)、液压力传感器、CAN(Controller Area Network)总线模块、电磁阀驱动模块和安全监控模块等供电,另一部分输入给场效应管驱动管模块提供电流源。

图2 控制器工作原理图Fig.2 Schematic diagram of the controller unit
单片机系统实时采集各种信号,当通过CAN收到制动命令后,单片机控制场效应管同时根据实际压力控制电磁阀驱动模块,电磁阀驱动模块与电池阀连接,电流流过电磁阀并使其打开,实现主动增压。电流从电源经过保险丝、场效应管、电磁阀驱动芯片、电磁阀、到电源地线,当电磁阀通过电流时,电磁阀开始工作,在整个过程中,安全监控实时监控各个模块异常,一旦发现异常问题,发送给单片机做备紧急处理[8-9]。
3 电磁阀温度电路模块
电磁阀温度电路模块原理如图3所示,当单片机接收到制动命令后,控制单片机控制场效应管工作端口和驱动芯片使控制端口处于高电平状态,单片机输出PWM(Pulse Width Modulation)到单片机输出PWM端口使电磁阀控制器端口输出电流,同时单片机电流计算端口计算出电流,与电流温度表配合计算出电磁阀温度[10]。
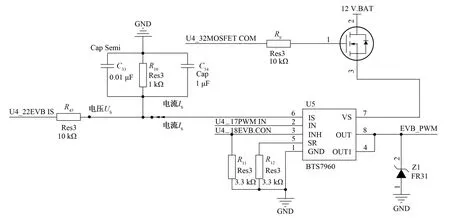
图3 电磁阀温度电路模块Fig.3 Temperature circuit module of solenoid valve
4 程序功能流程图
当车辆处于自动驾驶或无人驾驶模式时,接收到制动命令后,程序首先要通过识别模式判断是否长时间制动,如果不是长时间制动,就进入正常制动模式(人工驾驶制动模式);否则,进入长时间制动模式,其判断条件为:安全监控(判断是否有故障信息),坡度模块(识别上坡或下坡),电流-温度插值表,释放开关检测,电流反馈等信息。进入长时间制动模式后,首先发出报警指示,如果车辆有驾驶员,进入人工驾驶;如果无人驾驶,要判断车速、温度、路面摩擦系数、期望压力和实际压力,通过安全策略控制压力增减。图4为程序功能流程图。
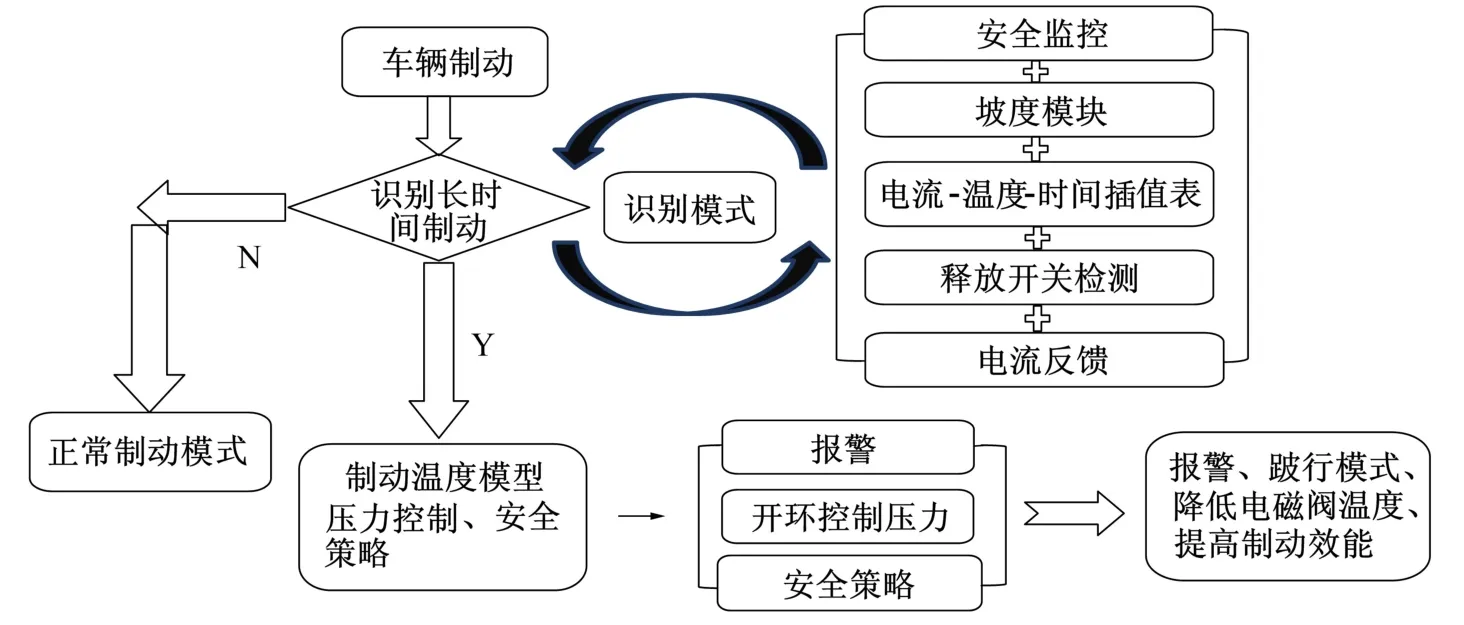
图4 程序功能流程图Fig.4 Flow chart of program function
5 安全监控
5.1 12 V电压监控


5.2 坡度模型监控
通过AIS1120SX芯片的SPI(Serial Peripheral Interface)将故障传输给单片机监控,如果有故障坡度模型失效,报警。
6 坡度模型
通过传感器和单片机软件计算,最终得出汽车是上坡还是下坡,在多大的坡道上行驶。

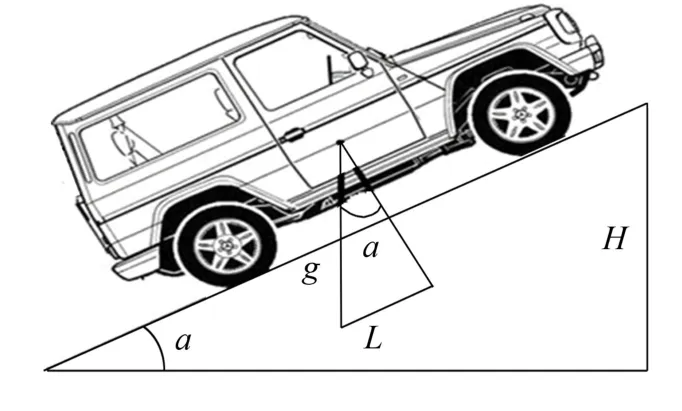
图5 坡度计算Fig.5 Slope calculation
7 温度转换模块
7.1 电流-温度-时间插值
温度模块计算,通过单片机计算电流反馈和时间,通过插值(见表1)计算出温度。通过大量实验,得到电磁阀在-50~-70 kPa真空状态时的电流-温度-时间数据曲线,如图6所示。测试方法是在电子真空助力器电磁阀上增加温度传感器、在驱动线上增加电流传感器、在助力器上增加真空度传感器等信号传输给单片机,并在实车上测试,得到数据。
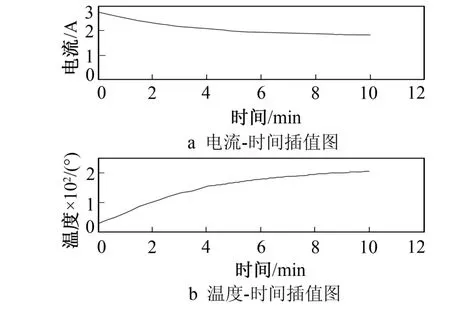
图6 电流-温度-时间插值曲线Fig.6 Current-temperature-time interpolation curve
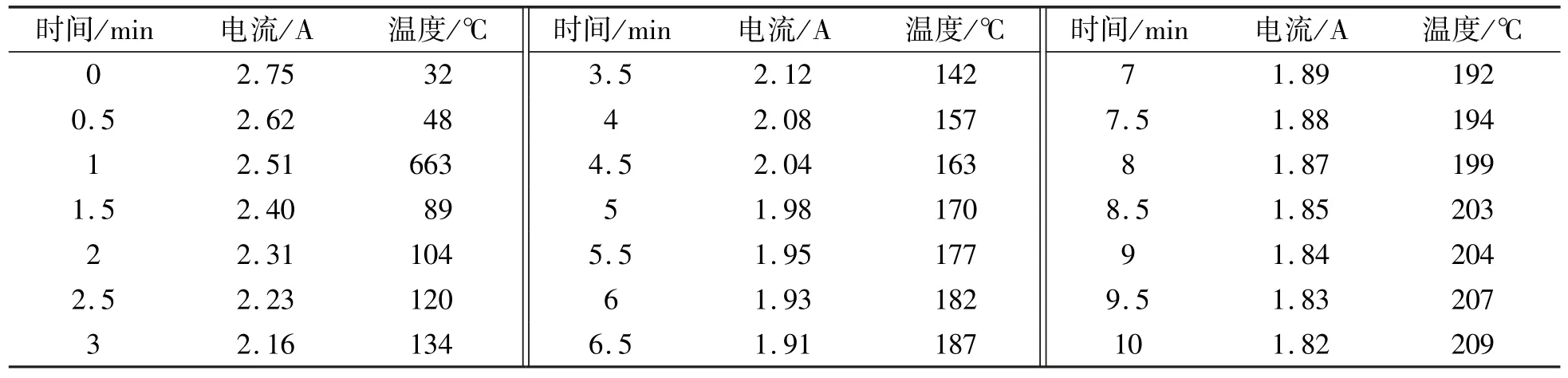
表1 电流-温度-时间表Tab.1 Current-temperature-time schedule
插值法是函数逼近的一种重要方法,它根据已知的数据序列(也可以理解为坐标中一连串离散的点),找到其中的规律;然后根据找到的规律,对其中尚未有数据记录的点进行数值估计,该估算值可无限接近真实值,根据实际应用对估算值和实际值设定误差范围,也可以对数据中的缺失进行合理的补偿。
线性插值原理。已知数据(x0,y0)与(x1,y1),要计算[x0,x1]区间内某一位置x在曲线上的y值,但实际值是Y=y+Δy,Δy可以无限小,Y≈y,如图7所示。

图7 插值图Fig.7 Interpolation chart



7.2 电流反馈计算

8 报 警
在程序中设置报警标记位,若有故障,故障标记为通过CAN总线发送到汽车仪表盘,仪表盘灯亮,或通过网络发送到智能网络调动中心处理。
9 开环压力控制
在制动过程中,计算出电磁阀温度在160℃后,单片机输出100%PWM,保持10 s,使电磁阀全部打开,最大范围增加液压力,然后输出60 PWM,保持5 min使车辆停止,整个过程就是开环压力控制(见图8)。

图8 开环控制Fig.8 Open-loop control
10 安全策略
在制动过程中,若出现电磁阀温度过高,则利用开环压力控制,使车辆停止,通过CAN总线请求EPB(Electrical Park Brake)配合、驻车,同时控制器尾灯闪烁。等待车辆停止20 min后,使电磁阀温度降低,车辆可以继续行驶。
11 结 语
笔者通过论述、研究实现对电子真空助力器控制,并完成智能汽车主动刹车,实现ADAS(Advanced Driving Assistance System)、AEB、辅助制动、主动避让等系统的刹车制动功能,通过温度模块、坡道模块和跛行模式完善无人驾驶在长时间下坡制动工况下,由于电磁阀线圈发热导致失效情况或制动不足等问题安全设计,为ADAS制动提供更可靠保障。
