涵道尾座式垂直起降飞行器全包线飞行控制
2022-01-08程子欢裴海龙
程子欢, 裴海龙
(华南理工大学自动化科学与工程学院,自主系统与网络控制教育部重点实验室,广东省无人机系统工程技术研究中心,广东广州 510640)
1 引言
涵道尾座式是近年来出现的一种新型尾座式垂直起降飞行器,其依靠涵道风扇与组合导流舵面形成单一的矢量动力单元,通过倾转机体飞行姿态以完成垂直起降/水平飞行的模态转换,兼顾垂直起降与高速巡航的特性.不同于倾转旋翼或固定翼-多旋翼复合型飞行器,由于没有任何冗余的垂直起降机构,这种垂直起降飞行器结构简单可靠性且灵活性高,易于车载/舰载携带,于军民领域都有很好的应用前景.而相较于传统的尾座式飞行器,这种涵道尾座式飞行器其低速状态下姿态控制能力更强,能有效弥补传统尾座式飞行器起降与悬停阶段抗风能力不足等劣势,尤其适合作为舰载无人机使用,如美国马丁无人机公司的V-bat[1-2].
先进的飞行控制技术是尾座式飞行器实现其垂直起降功能的核心.由于兼顾垂直飞行与水平飞行的能力,尾座式飞行器的飞行状态变化较大,特别是在由垂直状态至水平状态的转换过程中,系统动态呈很强的非线性.一些研究人员对飞行器各模态(垂直/水平/转换过渡)进行动力学简化与建模,分别设计各模态下的控制器,并设计相应的切换率实现各模态间的转换[3-5].然而多模态切换控制难以保证稳定性,即便在稳定域中的切换动作也可能导致系统发散,使得对切换率的设计要求较高,同时也加大了对系统模型的依赖程度.随着非线性飞控技术的进步,人们更倾向于采用统一的控制器完成飞行器全状态下的非线性控制,保证闭环系统能大范围甚至全局稳定[6-8],即全包线飞行控制器.在全包线飞行控制框架下,使用统一的坐标系描述机体垂直/水平全飞行状态下的动力学特性[9-10],而系统的多模态特性则反映在相应参数的变化上.
对于涵道尾座式飞行器,其矢量动力系统控制能力比传统尾座式更强,所允许的飞行状态范围更大,因此对全包线飞控的需求更为迫切.然而,由于涵道与机身机翼间复杂的气动耦合效应,这种飞行器在各状态下所受的力与力矩都较为复杂,表现出强非线性和强耦合特性[11],尚未有简单的解析模型适用于这些复杂非线性项的动力学描述.目前为止,针对这种新型垂直起降飞行器的公开成果十分稀少,除成功研制的机型V-bat外,仅有D.H.Shim等人的团队制作了原型样机,并使用分段线性模型与L1自适应控制器完成了飞行试验[12-13].然而,该团队并未就其控制方法进行深入的理论研究,其稳定性还有待评估.
本文研究一类涵道尾座式垂直起降飞行器,其拥有较强的矢量推进能力,能在同一高度完成垂直悬停、低速飞行、垂直/水平转换、高速巡航等飞行科目,如图1所示.对于该类飞行器,如何处理其复杂的气动效应在全包线飞行过程中表现出的大范围非线性变化,则是飞行控制的核心难点.对此,本文提出一种全包线飞行控制方案.在设计的控制框架中,充分考虑了各飞行状态下机体所受气动力矩、气动力及动力系统拉力系数的变化这3个因素,并设计了不同的控制策略加以应对.首先,对于不可直接测量的外部气动力矩,设计了一辅助系统对其进行观测估计,以及一自适应律对其进行补偿.所使用的自适应律采用一动态设计,能抑制因高自适应增益带来的系统鲁棒性弱化,从而实现对未知外部力矩的快速响应.其次,对于外部气动力,本方法利用了机载惯性测量元件(inertial measurement unit,IMU)的测量结果,并给出一种基于IMU加速度(比力)测量的几何映射方法以解算所期望的拉力与姿态.进一步地,对所提出的控制框架,本文给出了一保证其全局指数稳定的充分条件.最后,在一小型涵道尾座式无人机上对所提出的控制方案进行验证.

图1 涵道尾座式飞行器各飞行状态Fig.1 Illustrations of different flight regimes of the ducted fan tail sitter aircraft
2 系统建模
如图2所示,所研究的涵道尾座式飞行器置有一尾推式涵道风扇矢量动力系统,其包括一涵道风扇与四片控制舵面,通过风扇转速控制风扇推力,通过舵面偏转产生控制力矩控制机体姿态.同时,该飞行器配有副翼用以增强在水平高速飞行时的滚转控制能力.在本文中,重点考虑依靠涵道风扇矢量动力系统,完成飞行器在由垂直至水平转换过程中的全局机动飞行,因此不将副翼作为系统输入考虑.

图2 涵道尾座式飞行器系统组成及相关定义Fig.2 System components and definitions of the ducted fan tail sitter aircraft
采用惯性系-机体系多坐标体系以描述机体的空间运动,其中惯性坐标系表示为{i1,i2,i3},三坐标轴按北-东-地规则定义.机体坐标系表示为{b1,b2,b3},与飞行器固联,其原点位于飞行器重心.其中,b3与拉力平行、方向相反,b1指向垂直状态的前(或水平状态的下)、b2指向侧面.在全文中,使用上标(·)I与(·)B以区分惯性系与机体系中的变量.
2.1 空间6自由度运动建模
尾座式飞行器在垂直/水平模态转换过程中会经历较大俯仰变化,因而姿态描述是其首要问题.一些研究人员采用四元数或方向余弦矩阵以避免传统的‘ZY X’欧拉角在90°俯仰角时存在奇异的情况[9].而考虑到直观性、易于调试等优势,大部分研究人员仍青睐于欧拉角描述法[14].本文采用‘ZXY’旋转顺序定义的欧拉角,在该定义下,俯仰角定义域扩充至[−180°,180°],而奇异点转为90°滚转角,有效避免了飞行器俯仰运动时的奇异问题.
飞行器姿态欧拉角表示为η=[φ θ ψ]T,沿机体轴的角速度表示为ωB=[p q r]T,在‘ZXY’旋转顺序下,欧拉角与角速度的关系为

其中各相关变量定义如下:

2.2 作用力
机体上的作用力对规划其飞行状态至关重要.在式(3)中,合力AB由力除以质量以标准化,具有加速度

2.3 作用力矩

该部分视作未建模动态,将设计相应的自适应律对其进行补偿.值得注意的是,若考虑副翼的动作对机体姿态或角速度构成负反馈以增稳,其力矩作用也可由式(7)囊括.
3 全包线飞行控制方案
全包线飞行控制的目标是使得飞行器在其飞行包线内达到全局稳定,由于位置动态与模型无关,这里仅考虑速度跟踪控制.控制结构采用飞行器典型的内环(姿态控制)-外环(位置控制)串级控制方案[17],在每个闭环回路中,采用一全局指数稳定的反馈系统作为标称系统,同时将相应的控制输入细分为一标称输入与一自适应输入.其中,标称输入建立标称系统,自适应输入对式(4)(7)中不可测的未建模非线性动态MBa,
3.1 相关定义

其中:下标(·)n表示标称输入,(·)a表示自适应输入.

一些相关符号定义为λm(·),λM(·)分别表示矩阵的最小和最大特征值;‖·‖F表示矩阵的F范数.
3.2 姿态控制(内环方案)

其中Kuv为滤波增益.
3.3 速度控制(外环方案)
将式(4)(9)代入式(3)中,可将机体运动学模型改写为

其中Kv为反馈系数矩阵.
该标称系统由标称拉力输入与飞行器姿态(uTn,ηd)共同建立:

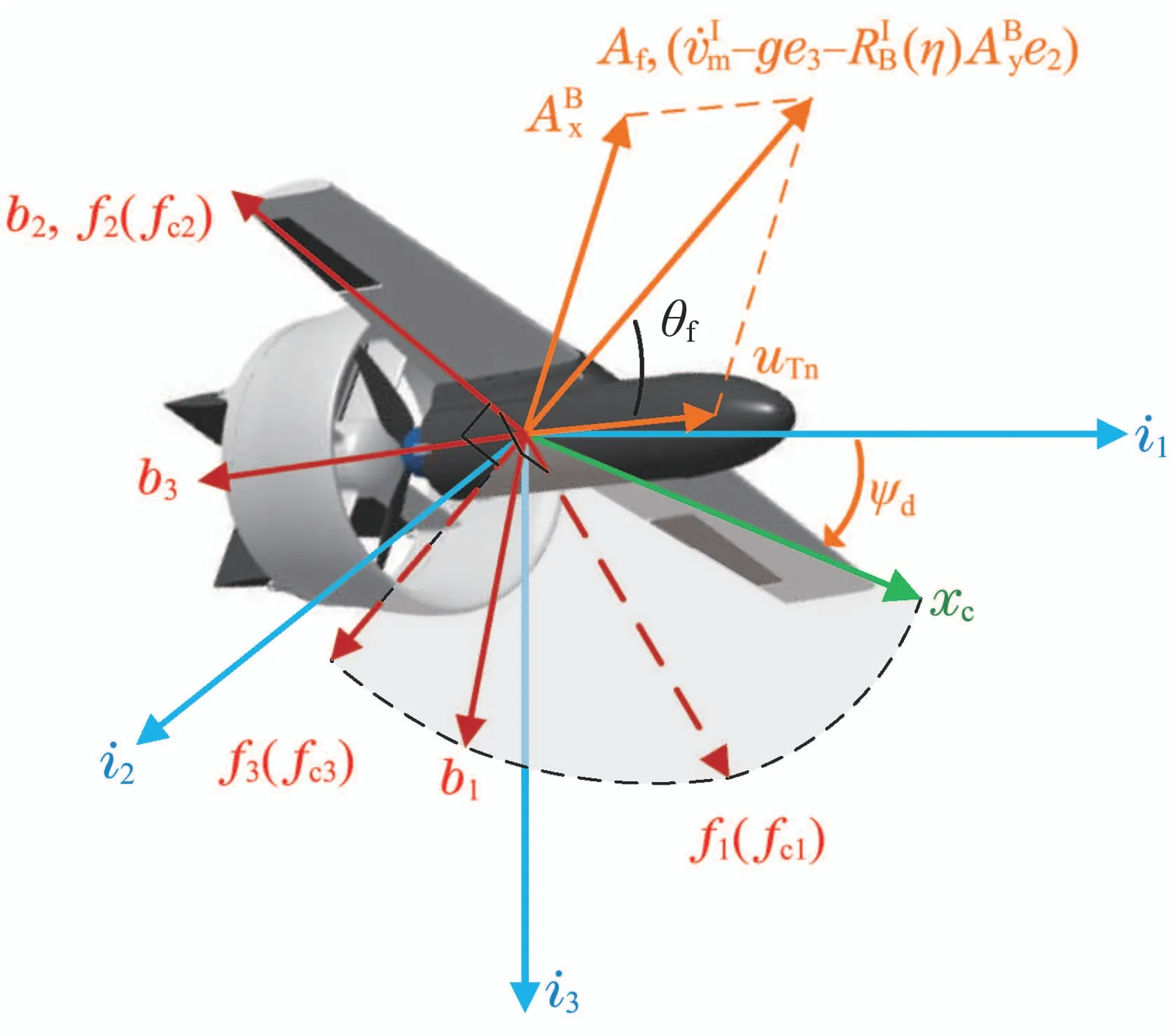
图3 辅助坐标系与惯性系、机体系示意Fig.3 Illustrations of the auxiliary frame, the inertial frame and the body frame
辅助坐标系的引入将带气动力的一般情况,转换为单一合力沿f3轴的标准形式,将式(19)代入式(17)中,得

在式(21)中,根据旋转矩阵不改变向量大小的性质,Af应与等式右边向量大小相同.同时,辅助系−f3轴(Af方向)应与等式右边向量同向,有
{

需要指出的是,式(23)存在奇异点‖fc3×xc‖2=0,代表了飞行器在竖直方向上以1G进行俯冲的理想情况,实际飞行难以实现,不作考虑.
最后一个辅助系坐标轴可由笛卡尔坐标系规则得到

3.4 分析与讨论
定理1 考虑由标称力矩输入式(11)、辅助系统(13)及自适应力矩输入式(14)构成的姿态闭环系统.不考虑滚转角为90°的极端情况,即−90°<−φ0≤φ≤φ0<90°,则姿态跟踪误差的原点(eη,eω)=(0,0)是全局指数稳定的.
该定理的证明详见附录1.
定理2 考虑由标称拉力输入/姿态设定式(25)-(26),自适应拉力输入式(28)及姿态闭环式(11)(13)-(14)构成的完整闭环系统.若满足定理1 中条件,及受限的速度误差‖ev‖2≤evM,则速度跟踪误差的原点(ev,eη,eω)=(0,0,0)是全局指数稳定的.
该定理的证明详见附录2.
采用较大的KM,K1能使内环子系统对MBa的变化(包括时变的风扰动)进行快速响应,但高增益也会带来过拟合、鲁棒性下降等问题.对此,自适应输入采用了式(14)中的动态形式,具有一阶低通滤波的特性.这种设计能防止执行器在自适应过程中因高增益而大幅振荡,从而使得系统对未建模动态具有快速适应性的同时又保证了一定程度的鲁棒性.而不同于常规的L1自适应控制设计,这里的低通滤波采用了时域的表达形式,有益于整体非线性系统的稳定性分析与设计.
完整的全包线飞行控制器结构如图4所示.

图4 飞行控制框图Fig.4 Flight control structure
针对由外部气动力/力矩的大范围变化所带来的非线性与多模态问题,本文所设计的全包线飞行控制框架,在内环设计中采用了式(13)-(14)所示的辅助系统与自适应律对外部气动力矩MBa进行观测与补偿,同时在外环设计中,利用了机载IMU可对外部合力AB进行直接测量的特性,提出一种基于IMU加速度测量的拉力/姿态解算方法.这样的优势在于,降低了对飞行器系统建模的要求(仅要求系统的输入模型,无须对复杂的外部气动效应进行建模),整体控制器结构更为简单可靠,易于实际系统的工程实现.
4 仿真实验
本文所设计的全包线飞行控制器之核心优势在于闭环系统能对外部气动力矩与气动力进行快速响应,补偿其影响以达到期望的控制性能,而实现该功能的控制器结构模块与模型无关,无须对这些复杂的气动效应进行建模.对此,本文设计仿真实验以展示与验证这一内在机理.同时,将本文所述方法与文献[18]所采用的非线性PID控制器进行比较,进一步验证本文方法的优势.在设计的仿真实验中,飞行器初始处于各状态原点(悬停状态),航向角指向正北(ψ=0).实验开始后,飞行器沿惯性系i1轴(北)以5 m/s2持续加速至巡航速度20 m/s,并在此后保持巡航飞行.同时,保持其他方向速度与航向角始终为0,即vIyd=vIzd=ψd=0.在该过程中,所设计的全包线飞行控制器将不断驱使机体低头加速,完成由垂直至水平的飞行模态转换过程.在该过程中,机体所受的外部气动力与气动力矩都将经历较大非线性变化,若不能对此进行妥当的处理,则会严重影响最终的控制性能.另外,为模拟真实情况,于角速度测量、加速度测量分别加入了方差为0.01 rad/s,0.3 m/s2的高斯噪声,并分别使用截止频率为ωc1=30 Hz,ωc2=5 Hz的二阶巴特沃斯低通滤波器进行滤波处理.所采用的控制器参数如表1所示.

表1 各控制器参数Table 1 Controller parameters
各系统状态的跟踪响应与对照结果如图5所示,其中虚线表示期望值(vId,ηd,ωBd),实线表示在本文全包线飞行控制器下闭环系统各状态响应,点划线表示在非线性PID控制器下的对照实验结果.仿真结果表明,对于本文所设计的全包线飞行控制器,由于外部气动力与力矩得到了较好的补偿,飞行器各状态在该过程中均展现了良好的跟踪性能.而对照实验中,采用非线性PID控制器尽管可通过积分控制一定程度达到这种补偿效果,但响应却要慢的多,因此整体的控制性能较差.这验证了本文所述方法在应对这类涵道尾座式飞行器全包线飞行控制上的优势.



图5 仿真实验系统状态响应结果(虚线:期望值,实线:本文全包线飞行控制器下系统各状态响应,点划线:非线性PID控制器下的对照实验结果)Fig.5 Simulation results of system responses (dash curve:reference input, solid curve:real value under the full envelope flight controller, dash-dot curve: comparative result)



图6 仿真实验力矩观测与拉力补偿结果Fig.6 Simulation results of moment estimation and thrust compensation
5 飞行试验
进一步地,本文采用一小型涵道尾座式无人机对所提出的全包线飞行控制方案进行验证,如图7所示.飞行器构型包括,总重2 kg,翼展0.8 m,9英寸涵道风扇.机载传感器包括IMU,磁力计,差分GPS,气压计及空速计.各传感器数据于机载集成飞控系统进行汇总,采用200 Hz的扩展卡尔曼滤波模块进行数据融合与状态估计.飞控算法运行频率设为100 Hz.飞行数据每20 ms(50 Hz)通过数传模块下传至地面站进行监测与记录.所采用的控制器参数与仿真实验相同,见表1.

图7 涵道尾座式无人机及水平面轨迹跟踪示意Fig.7 Ducted fan tail sitter UAV and illustration of horizontal path following

各状态的控制响应如图8所示,其中图8(a)-(b)分别为惯性系速度、机体姿态的响应曲线,实线表示相应状态的实际值(vI,η),虚线表示期望值(vId,ηd).试验结果表明,飞行器通过倾转俯仰姿态完成了由垂直至水平及水平至垂直的模态转换,飞行状态经历了前飞速度由0至20 m/s,俯仰角由0至−90°的大范围变化过程.在该过程中,由于系统非线性及各未建模动态得到了较好的补偿,系统速度、姿态均展现出了良好的跟踪性能.


图8 飞行状态响应结果(实线:实际状态,虚线:期望值)Fig.8 Results of state responses(solid curve:real value,dash curve:reference input)

6 结论
本文针对一种涵道尾座式垂直起降飞行器的非线性飞行控制问题,提出了一种全包线飞行控制方案,并完成了实际飞行试验.所提出的方法对系统模型依赖较小,通用性较强.主要成果及结论包括:
1) 在设计的控制框架中,将不可测的力矩、阻力分量、拉力系数变化等非线性因素视作未建模动态,并设计了一种自适应控制率对其进行补偿.
2) 对于飞行器大状态变化时的非线性运动学,提出了一种基于IMU比力测量的拉力/姿态几何解算方法,从而无须对复杂的外部气动力进行建模.
3) 在满足一定的充分条件下,闭环系统是全局指数稳定的.
4) 采用所提出的控制方案,完成了涵道尾座式样机的垂直/水平飞行模态转换控制,飞行试验结果表明,所提出控制方案能使飞行器在各状态下均获得良好的控制性能.

图9 试验轨迹跟踪结果(实线:实际状态,虚线:期望值)Fig.9 Tracking results of the flight test course(solid curve:real value,dash curve:reference input)
附录1
附录1给出定理1的证明过程.
假设1 所允许的飞行器力矩输入的动态远快于外部力矩的变化,以致于在力矩输入(角加速度)变化的时间尺度内,MBa(v,η,ωB,wI)是慢变或不变的,即˙MBa≈0.
从控制系统的时间尺度来看(快/慢流形),通过采用高自适应增益与高观测增益(式(13)中的KM,K1)或提高系统采样频率,可以很容易达到自适应部分与系统状态的快慢流形分离.在这种条件下,低阶状态vI,η,ωB在力矩输入变化


附录2
附录2给出定理2的证明过程.根据式(15)-(17)(19)(21)(27),可得如下的速度误差动态:


考虑到飞行器不可无限加速,采用受限的速度误差是合理的,将‖ev‖2≤evM代入式(b10)最后一项中,并将式(b10)中‖eη‖2替换为‖z2‖2可得