基于1比特量化的大规模MIMO雷达系统直接定位算法
2022-01-08张国鑫孔令讲
张国鑫 易 伟 孔令讲
(电子科技大学信息与通信工程学院 成都 611731)
1 引言
多输入多输出(Multiple Input Multiple Output,MIMO)雷达通过将无线通信系统中的MIMO技术引入到雷达领域,同时结合数字阵列处理技术,目前已成为国内外雷达领域的一个研究热点[1–4]。根据发射和接收天线中各单元间距的大小,MIMO雷达通常可以分为集中式MIMO雷达(也称相干MIMO雷达)和分布式MIMO雷达(也称为非相干MIMO雷达)。前者类似于传统的相控阵雷达,收发天线各单元相距较近,且各个阵元可以发射不同的信号波形,因此具备波形分集和更灵活的功率分配等能力[5]。后者通过分置相距较远的收发天线,使得各阵元可以从不同视角观测目标,从而克服目标雷达截面积(Radar Cross Section,RCS)的闪烁效应,提高了雷达对目标的探测性能,在目标检测、定位、跟踪等领域得到广泛的应用[6,7]。特别地,目标定位技术在MIMO雷达系统的各项基于位置信息的任务中扮演着重要的角色。
常见的多站雷达定位技术主要可以分为两类,其中第1类是二次定位技术,在这类定位技术中,目标位置的确定主要通过两个步骤实现。首先,各雷达站从接收到的经目标反射后的回波中估计目标位置相关参数,其中包括信号的到达角[8–10]、到达时延[11–14]、多普勒[15]、信号强度[16,17]等。然后利用测得的位置参数信息,建立关于目标位置的定位方程,进而求解出目标位置。由于量测信息易得,位置求解是线性等优点,二次定位是现今应用最广泛的定位技术。然而,由于各雷达站对目标位置相关参数的测量是孤立进行的,忽略了各雷达站测得的位置参数均来自同一目标这一约束,因此这种定位方式是次优的。第2类是直接定位技术(Dircet Position Determination,DPD),它没有位置参数提取的中间步骤,而是直接将接收到的基带信号传输到融合中心处理实现位置估计[18–21],在低信噪比下具有更高的定位精度和更好的鲁棒性[22–25]。
近年来,一些基于广域节点分布的大规模MIMO系统在环境监测、感知和控制等方面都表现出极大的潜力,其目的通常是利用少至几十大到成百上千乃至更多根天线来显著提升系统的传输容量和覆盖率等[26–28]。文献[29]针对大规模MIMO系统中的目标检测问题,得出即使在没有任何扰动统计先验信息的情况下,也可以通过增加天线数量满足检测性能。文献[30]阐述了大规模MIMO系统的特性和优势,表明大规模MIMO系统能够显著增加系统空间自由度,提高频谱效率,同时通过实现较高的空间分辨率,提升系统的抗干扰能力等。尽管具有上述优势,大规模MIMO系统在实际应用中仍然要考虑到系统成本、功耗及节点通信量等的要求。因此其对于低传输带宽、低功耗以及低复杂度节点的需求显著增加。与此同时,基于这类节点的信号处理算法也变得尤为重要[31–33]。
为了满足上述需求,一些研究主要集中在压缩感知领域,通过以一个较低的采样率实现对信号的采集,并利用信号的稀疏性构建不同的信号处理算法恢复信号[34–36]。然而这些研究均针对的是无限位数的高精度量化。传统的高精度量化由于成本高,功耗大,构造复杂,将其应用到射频前端是不切实际的[37]。因此,在数据采集的设计过程中,通常需要在采样率和量化精度之间权衡。另一方面,只保留采样数据符号位的1比特量化在大规模MIMO系统中被证明是有前景的[38]。通常商业上可用的模数转换器(ADC)的分辨率大多是12比特到16比特,功耗为几瓦。相比之下,1比特量化仅需要一个简单的比较器便可实现,不需要自动增益控制,功耗仅为几毫瓦,在保证一定性能的同时为系统提供了一种低复杂度、低功耗的解决方案。
目前,针对1比特量化的参数检测与估计算法在统计信号处理领域已经有一定的研究。文献[39]考虑了带宽受限条件下的参数估计问题,通过引入抖动分量并将接收信号量化成1比特,提出了一种不需要了解抖动信息和噪声分布的参数估计方法;文献[40]将这种方法扩展到了多维参数估计;文献[41,42]研究了低传输带宽下的分布式检测问题,由于严格的功率和带宽限制,每个传感器将其局部观测量化为1比特并发送到融合中心,在融合中心使用广义似然比检测器实现全局决策;文献[43]较早地研究了利用1比特量化信号估计信号的到达角,并对比了多种1比特参数估计器;文献[44]在此基础上考虑了目标多普勒频率,研究了分布式MIMO雷达系统利用1比特采样进行角度和多普勒频率的联合估计;文献[45]则针对超宽带(UWB)系统传输带宽大、功耗高的问题,提出了一种采用均匀线阵天线和高速比较器的1位量化TOA/AOA估计器,并设计了相应的3步估计TOA/AOA算法实现目标定位。值得注意的是,上述研究主要集中在利用1比特信号估计二次定位中的相关参数,尽管可以满足系统在低传输带宽下的参数估计,但是当信噪比较差时,这种方式的定位性能不尽如人意。
本文针对现有的基于1比特量化的二次定位算法在低信噪比下定位精度低、鲁棒性差的问题,提出了一种基于1比特量化的直接定位算法。与基于1比特量化的二次定位算法不同,各雷达接收基站直接将接收到的基带信号量化成1比特,然后传输至融合中心实现目标定位。本文的主要贡献如下:首先,通过将接收信号量化成1比特,并分析1比特信号的分布函数,建立了关于目标位置的多站联合似然函数。然后,通过推导似然函数的凸性,利用梯度下降算法给出了回波中未知反射系数的估计方法,并根据最大似然估计理论建立了基于1比特信号的直接定位代价函数。最后,通过仿真实验验证了所提算法的定位性能。仿真结果表明,所提算法仅需传输相较于高精度采样直接定位算法(16比特为例)6.25%的数据量。同时其功耗仅为前者的千分之一。此外,相较于1比特二次定位算法,所提算法在低信噪比和低MIMO天线数量下均具有更高的定位精度和鲁棒性,并且其定位性能会随着过采样技术的应用进一步提升。
2 大规模MIMO雷达系统信号模型
图1展示了基于广域节点分布的大规模MIMO雷达系统定位场景,其中M个坐标为R2,m1,2,...,M的发射站和N个坐标为的接收站广泛分布于空间(考虑二维笛卡儿坐标平面)。静止目标位于p(x,y)T,(·)T表示转置。各发射站发送正交的窄带信号,经目标反射后被接收站接收。不失一般性,假设各雷达站工作时间同步,信号沿视线路径(Line Of Sight,LOS)到达接收站。因此,第n个接收站接收到的来自第m个发射站的基带信号可以建模为
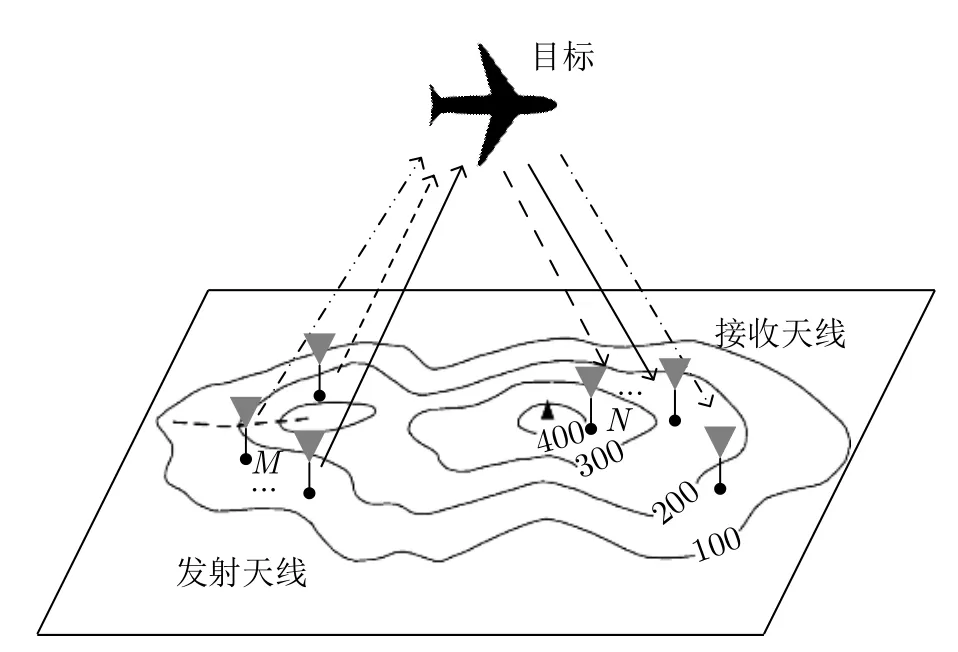
图1 基于广域节点分布的大规模MIMO雷达系统定位场景Fig.1 Location diagram of massive MIMO radar system based on wide-area node distribution

其中,T表示观测时间,sm(t)表示第m个发射站发送的基带信号,αmn表示发射站m发出的信号经目标反射后到达接收站n对应传播路径上(以下简称通道mn)的复反射系数。αmn|αmn|ejβmn,在观测时间T内它通常可以被看作一个幅值为|αmn|相位为βmn的确定未知的复数变量[46]。同时,对于非相干MIMO雷达,在接收/发射天线分布足够广泛的条件下,不同通道的复反射系数可以被假定为互不相关的[47]。τmn(p)表示信号在通道mn上的传播时延,与目标位置相关,定义如下
其中,c表示电磁波传播速度。ωmn(t)表示通道mn对应的零均值复高斯白噪声,在不同通道中相互独立,其统计特性可以描述为
这里,m′1,2,...,M,n′1,2,...,N。(·)∗表示共轭,E(·)代表数学期望,δ(t)为冲击函数。为噪声功率,受接收机自身和外部环境的影响。这里假设只考虑加性高斯白噪声,此种噪声模型适用于同质环境,如空中搜索模式,扩展到包含空间相关杂波项的模型则需要更复杂的信号预处理步骤,如通过白化处理,相关矩阵对角化等,本文不考虑。注意到,式(1)中的模型只考虑了时延信息,实际应用中也可根据雷达系统机制及工作场景的不同将其扩展为包含目标相位信息、多普勒信息等的模型[18,19,44,48]。
各接收站将接收信号离散化处理,式(1)的离散样本形式可以表示为

这里,

其中,采样间隔满足TsT/(KT −1)。rmn[k]rmn(kTs),sm[k]sm(kTs −τmn(p)),k0,1,...,KT −1。噪声wmn(t)的离散形式可以表示为

采样后的噪声仍然被建模为零均值复高斯白噪声过程,其自相关矩阵服从

其中,Id为d×d的单位矩阵,(·)H代表共轭转置,表示通道mn的噪声方差。
3 基于1比特量化的二次定位算法
受限于系统的传输带宽及功耗,传统的高精度采样不再适用于大规模MIMO系统。文献[49,50]考虑了将接收到的量测参数进行1比特量化,并采用最大似然估计实现了参数求解,解决了带宽受限条件下的参数估计问题。本文也将此种方式应用到1比特二次定位中用于时延参数的估计。
通道mn接收到的时延量测可以建模为

其中,vmn(e)表示通道mn测得的时延误差,服从零均值,σ2方差的高斯分布,且在不同通道间相互独立。E表示通道mn的观测次数。
考虑到传输带宽的限制,时延信息被量化成1比特,融合中心接收到的1比特信息可用式(9)表示
τ[τ11(p),τ12(p),...,τMN(p)]T,同时
其中,q(x)表示vmn的累积分布函数。将式(11)代入式(10)并对其取对数可得关于时延的对数似然函数为
由此,目标时延可以根据最大似然估计获得

融合中心可根据获得的时延量测,利用最小二乘,最大似然等方法估计出目标位置。
以上方法通过将接收到的量测信息量化成1比特,可以实现低传输带宽下的目标定位。然而当信噪比较低时,由于量测信息完全淹没在噪声中,时延的估计不再有效。因此,在低信噪比下,此种方式的定位性能会急剧下降。
4 基于1比特量化的直接定位算法
基于1比特量化的二次定位算法有效降低了系统的传输带宽和功耗,但其定位性能在低信噪比下会急剧下降。本节提出了基于1比特量化的直接定位算法,为了方便表述,将所提算法命名为1bit-DPD算法,已有1比特二次定位算法命名为1bit-IDP算法。本节内容安排如下:首先介绍1bit-DPD的量化模型,然后建立关于目标位置的1比特信号代价函数,并利用最大似然估计实现目标定位,最后分析所提算法的计算复杂度和通信量,以及过采样对所提算法定位性能的增益。
4.1 1比特直接定位量化模型
图2展示了1比特数字采样接收前端。其中TsT/(KT −1)1/2vB表示采样间隔,v ≥1表示过采样因子。定义r[r11,r12,...,rMN]T为采样后获得的离散信号。
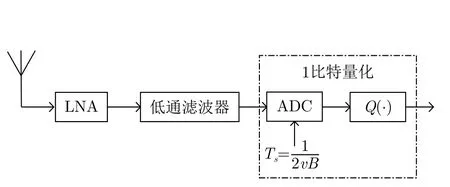
图2 1比特数字雷达射频采样前端Fig.2 RF sampling front end of one-bit digital radar
Q(·)通过将采样后的离散信号与一个已知的门限比较输出1比特信号,其量化过程可以表示为

这里z[z11,z12,...,zMN]Tz,中的第l个元素满足
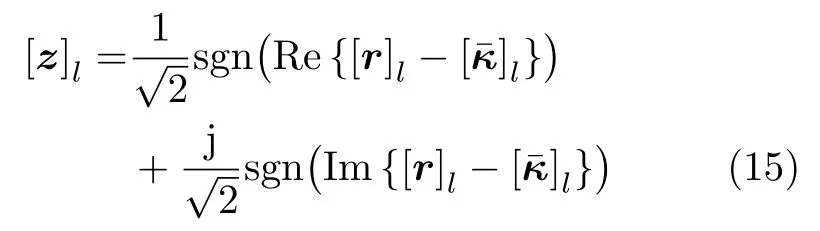
l1,2,...,L,L表示z中总的元素个数。[A]l定义为A中第l个元素。[κ11,κ12,...,κMN]T是已知的量化门限。Re(·),Im(·)分别表示取实部和取虚部。sgn(·)为取符号操作,定义为

由此,系统可以通过上述模型将基带信号量化成1比特,并将其传输至融合中心进而实现目标定位。
4.2 1比特直接定位算法
对于融合中心接收到的离散二进制信号,采用概率质量函数(Probability Density Function,PMF)来表征其似然函数,通道mn传输的2进制信号其PMF可以表示为
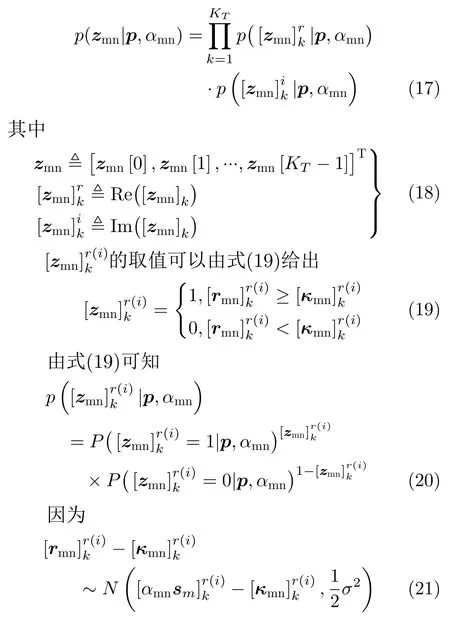
其中,N代表高斯分布。所以可以进一步推导出
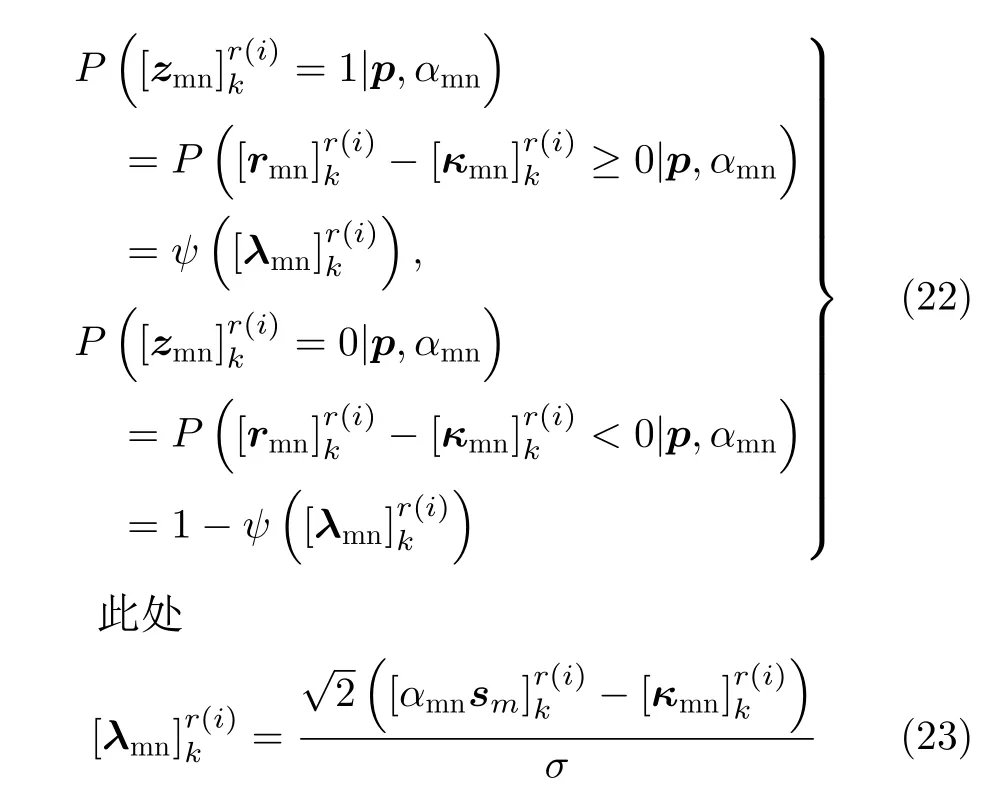
这里假设发射信号已知。ψ(x)为标准正态分布的累积分布函数。
将式(20)、式(22)代入式(17)并对其取对数后可得
观察式(23)可知,其中存在未知的目标反射系数αmn,可以通过最大似然估计求得

同时,为了确定梯度下降算法中合适的步长,可以使用回溯线搜索算法[51]自适应选择步长。算法的具体步骤如表1所示。
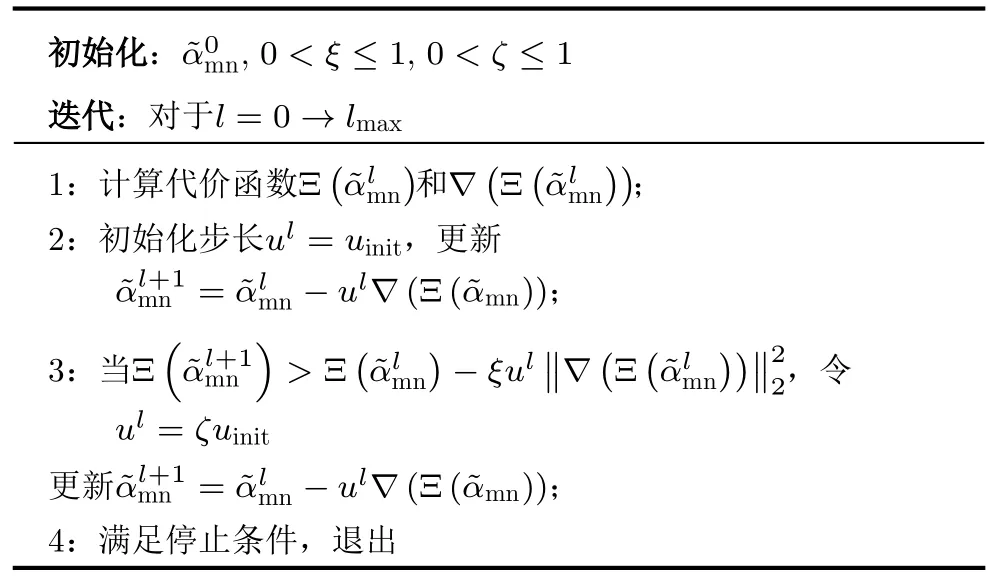
表1 式(25)的梯度下降求解步骤Tab.1 The gradient descent solution for Eq.(25)
由于不同观测通道的独立性[42],融合中心处关于目标位置的多站联合对数似然函数可以表示为
目标位置可以根据最大似然估计求得

式(29)可以通过在p的可行区域内进行一个二维搜索求得。
综上,本文所提算法可以总结为,首先各接收站对接收到的基带信号进行1比特量化,融合中心然后根据式(25)求解得到各通道未知的复反射系数,并将其代入式(24),最后根据式(29)求解得到目标位置。算法的具体流程如图3所示。
算法复杂度分析:
从图3对1bit-DPD算法的总结可以看出,算法的计算代价主要以计算目标函数−ℓ2(zmn;p,αmn)和l(z;p,α)为主。其中在梯度下降算法中,主要的计算任务包括计算和,因此对于特定样本数KT而言,根据式(25)和式(28)的定义,当发射站和接收站的数目分别为M,N时,计算负荷可以用O(MNKT)+O(MNKT I)衡量,其中O(·)表示量级,I表示梯度下降算法中的迭代次数。具体而言,当式(28)中对数似然函数lnl(z;p,α)包含的通道数为M ×N,同时假定参数状态空间用Nx×Ny网格离散,所提算法的计算负荷可以表示为O(MNKT NxNy)+O(MNKT I)。而如果不采用梯度下降算法,直接在未知参数的状态空间搜索,
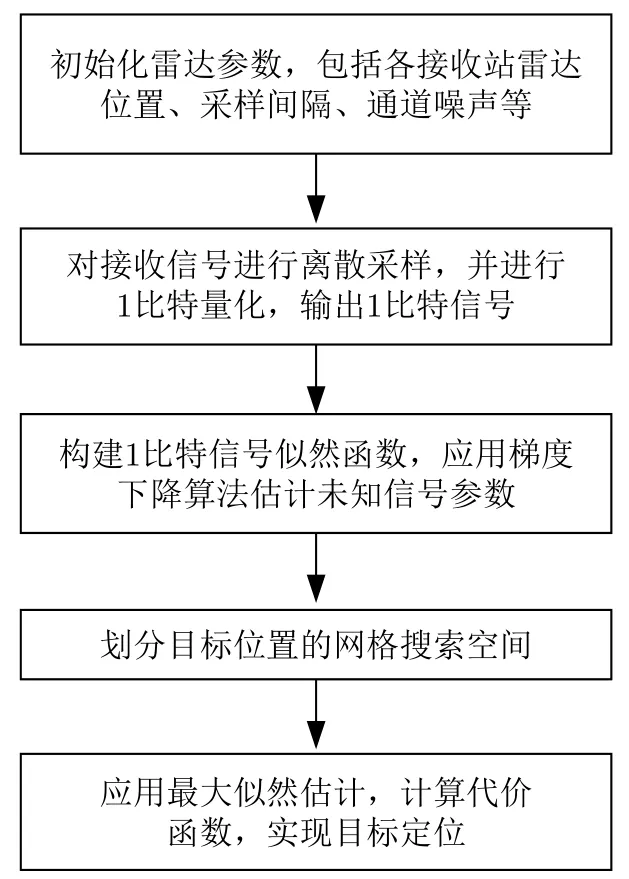
图3 1bit-DPD算法流程图Fig.3 Flow chart for 1bit-DPD algorithm
其计算复杂度为O(MNKT NxNyNRNI),其中Nx×Ny×NR×NI包含了未知参数p和的状态空间。因此采用梯度下降算法与直接在未知参数空间搜索相比,降低了1bit-DPD的计算复杂度。
算法数据量分析:
表2是1bit-DPD算法与高精度采样DPD算法(以16比特量化为例)的数据量及功耗对比。从表中可以看出,高精度采样DPD算法中每个采样点需要占用2 Byte的存储空间,而1bit-DPD算法中每个采样点仅占用1 bit的存储空间,两者在单个采样点的数据量对比为
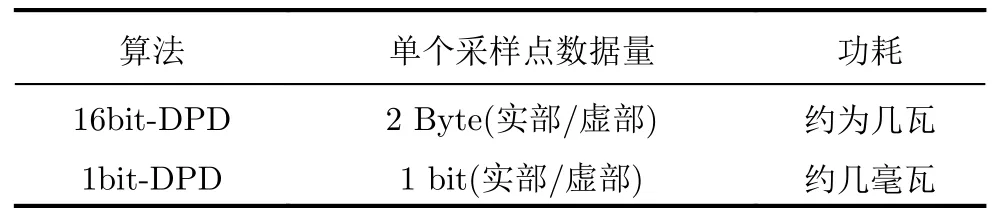
表2 数据量及功耗对比Tab.2 Comparison of data volume and power consumption
同时,文献[52]表明采用1比特ADC的系统功耗仅为16比特ADC系统功耗的千分之一。因此,相较于高精度采样DPD算法,所提算法具有更小的通信带宽和功耗。
4.3 过采样改善定位性能
图2中vTb/Ts表示过采样因子,Tb表示奈奎斯特采样间隔。定义ro为以过采样间隔Ts采样后得到的信号版本,rg为以奈奎斯特采样间隔采样后得到的信号版本,由文献[53]可知两者具有如下的对应关系
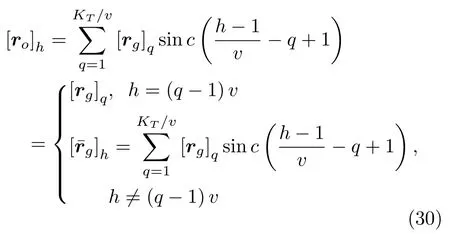
其中,1≤q ≤KT/v,观察式(30)可知,ro中有KT/v个元素与rg中对应元素相等,将ro中的其余部分用表示,它可以表示成奈奎斯特采样信号版本的线性组合。由于之间是线性独立,因此有,其中τ(p)[τ11(p),τ12(p),...,τMN(p)]。Γ(·|θ)表示参数θ的费雪信息矩阵(FIM)。
将式(30)代入式(14),可以得到
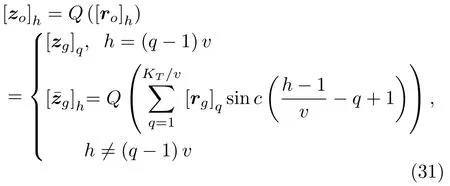
同样,zo表示使用过采样获得的1比特信号版本,zgQ(rg)表示对应的以奈奎斯特采样率采样获得的1比特信号版本。式(31)表明,zo中同样有KT/v个元素与zg中对应元素相等,但zo中的其余元素并不能像式(30)一样表示成对应奈奎斯特采样信号版本的线性组合,因此有Γ()≥0。根据FIM的链式法则[54],可以得到

进而

可以看出,过采样能够为1比特信号提供相较于奈奎斯特采样更多的信息,进而改善1bit-DPD的定位性能。
5 仿真实验
本节将通过仿真实验验证所提算法的性能。主要内容如下,首先对比了所提算法(1bit-DPD)在不同信噪比下的代价函数平面,分析了信噪比对所提算法性能的影响。接着,通过蒙特卡洛实验对比了其与1bit-IDP算法的有效估计率曲线,并分析了其与1bit-IDP算法以及高精度DPD算法在不同信噪比下的均方根误差(Root-Mean-Square Error,RMSE)曲线。然后,通过设置不同的过采样因子,研究了过采样对两者定位性能的影响。最后,对比了两种算法在不同天线数目下的定位性能。
5.1 定位性能分析
考虑一个具有25个收发通道的分布式MIMO雷达系统定位场景,其中五部收发一体的雷达分别位于(–100,–60) km,(–50,–80) km,(0,–100) km,(50,–80) km,(100,–60) km。目标在每次实验中随机出现在以(0,0) km为中心,边长为50 km的正方形区域内。量化门限在接收信号的最小值和最大值之间随机选取,hmnτmn(p),观测次数EKT。信噪比变化范围为–30~20 dB,蒙特卡洛实验200次。采用均方根误差(RMSE)和有效估计率衡量定位性能。其中RMSE定义如式(34)
其中,D表示蒙特卡洛实验次数,pi为第i次蒙特卡洛实验得到的目标位置。有效估计率定义为:在D次独立的蒙特卡洛定位实验中,目标估计位置落在真实目标位置指定范围内的实验次数M与总实验次数D的比值M/D,它可以有效反应算法的定位性能。在仿真中将有效范围设置为距离目标真实位置6 km的圆内(包括圆上)。仿真结果如图4—图6所示。
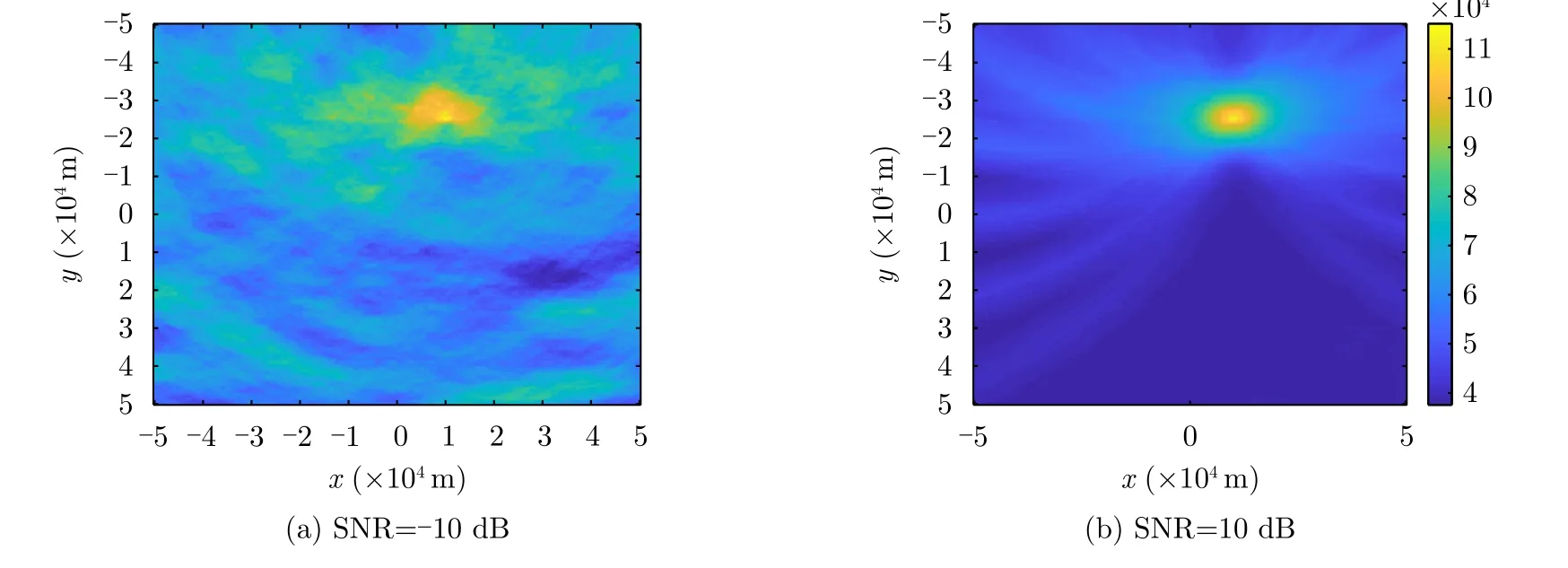
图4 不同信噪比下1bit-DPD算法代价函数平面Fig.4 1bit-DPD cost function plane under different SNR
图4展示了信噪比为–10 dB和10 dB下1bit-DPD算法的1比特代价函数平面。可以看到,代价函数的峰值集中在目标出现的区域附近。当信噪比较高时,峰值所在位置的区域分辨率要明显高于相应的低信噪比情况,因此,信噪比的提高可以有效改善所提算法的定位精度。
图5是1bit-DPD算法与1bit-IDP算法在不同信噪比下的有效估计率曲线对比图。可以看到,所提算法(1bit-DPD)在信噪比为–15 dB便可实现对目标的有效估计,而相比之下,1bit-IDP算法在信噪比为–5 dB时才能实现对目标的有效估计。与此同时,在低信噪比下,所提算法相较于1bit-IDP算法具有更高的有效估计率。因此,相较于1bit-IDP算法,所提算法在低信噪比下具有更优的估计性能。
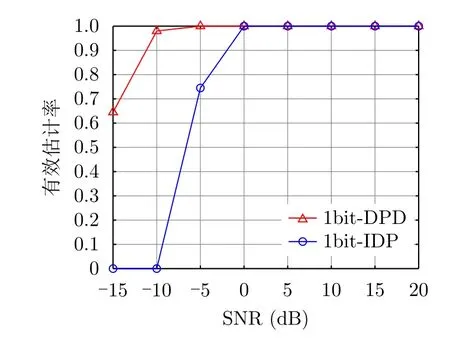
图5 不同信噪比下1bit-DPD与1bit-IDP有效估计率曲线Fig.5 Effective estimation rate curves of 1bit-DPD and 1bit-IDP under different SNR
图6是1bit-DPD算法与1bit-IDP算法以及高精度采样DPD算法(以16比特量化为例)在不同信噪比下的RMSE对比曲线。可以看到,1bit-IDP算法和1bit-DPD算法相较于高精度DPD算法在相同信噪比下均会有一定的性能损失,但这是建立在更少通信量和更小功耗的前提下。此外可以观察到,1bit-IDP算法的定位性能具有门限效应,具体为:当信噪比低于0 dB时其RMSE会快速收敛至仿真中设置的定位误差上限,定位效果急剧恶化,而相比之下,所提算法在低信噪比下定位性能明显优于前者。
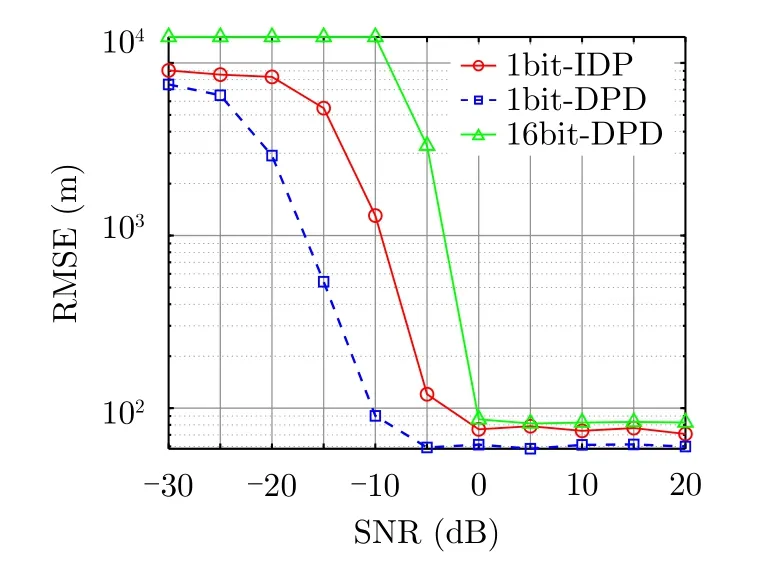
图6 不同信噪比下1bit-DPD与1bit-IDP以及16bit-DPD的定位性能对比图Fig.6 Comparison of localization performance of 1bit-DPD,1bit-IDP and 16bit-DPD under different SNR
5.2 过采样分析
图7展示了信噪比为5 dB时,1bit-DPD算法和1bit-IDP算法的定位精度随过采样因子v的变化关系。可以看出,由于1bit-IDP算法在模型中并没有考虑过采样因子的影响,所以其定位性能并不会随着过采样因子的变化而改变,而1bit-DPD算法的定位性能则会随着过采样因子的增加而提高,这也验证4.3节中的理论分析。由此可知,所提算法的定位性能可以通过应用过采样技术进一步提升。
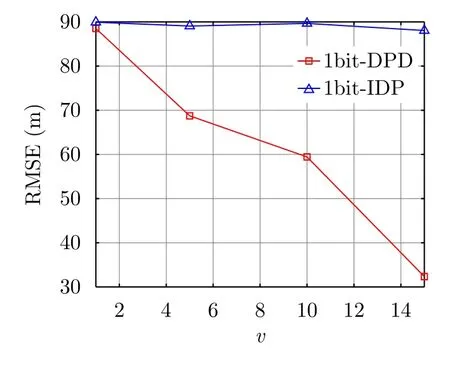
图7 不同过采样因子v下1bit-DPD和1bit-IDP的定位性能对比图Fig.7 Localization performance of 1bit-DPD and 1bit-IDP under different over-sampling factors v
5.3 大规模MIMO系统天线数量与算法性能分析
为了研究1bit-DPD算法的定位性能与MIMO雷达天线数量之间的关系,以下仿真分析了信噪比为–10 dB下1bit-DPD算法和1bit-IDP算法的定位性能随不同天线数目的变化情况。其中各雷达收发天线均匀分布在以(0,0) km为圆心,10 km为半径的圆上。仿真结果如图8所示。
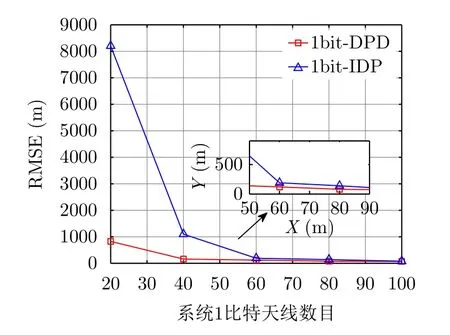
图8 不同天线数量下1bit-DPD和1bit-IDP的定位性能Fig.8 Localization performance of 1bit-DPD and 1bit-IDP under different number of base stations
图8展示了两种算法的定位性能随MIMO雷达系统天线数目的变化情况。可以看出,通过采用大规模数量的天线,可以有效提高基于1比特量化算法的定位性能,弥补由于量化过程带来的系统定位性能损失。此外,相较于1bit-IDP算法,当天线数量较少时,所提算法在同等数量天线下仍然可以获得更优的定位性能。
6 结语
针对基于1比特量化的二次定位在低信噪比下定位精度低,鲁棒性差的问题,本文提出了一种基于1比特量化的直接定位算法。首先通过将接收到的信号直接进行1比特量化得到对应的二进制信号,并在融合中心建立了关于目标位置的代价函数。接着通过证明代价函数的凸性,利用梯度下降算法求解了未知的信号参数。最后通过网格搜索的方式实现目标定位。仿真结果表明,相较于1比特二次定位算法,所提算法在低信噪比下具有更好的定位性能,并且随着过采样技术的应用,其定位性能会进一步提升。
附录
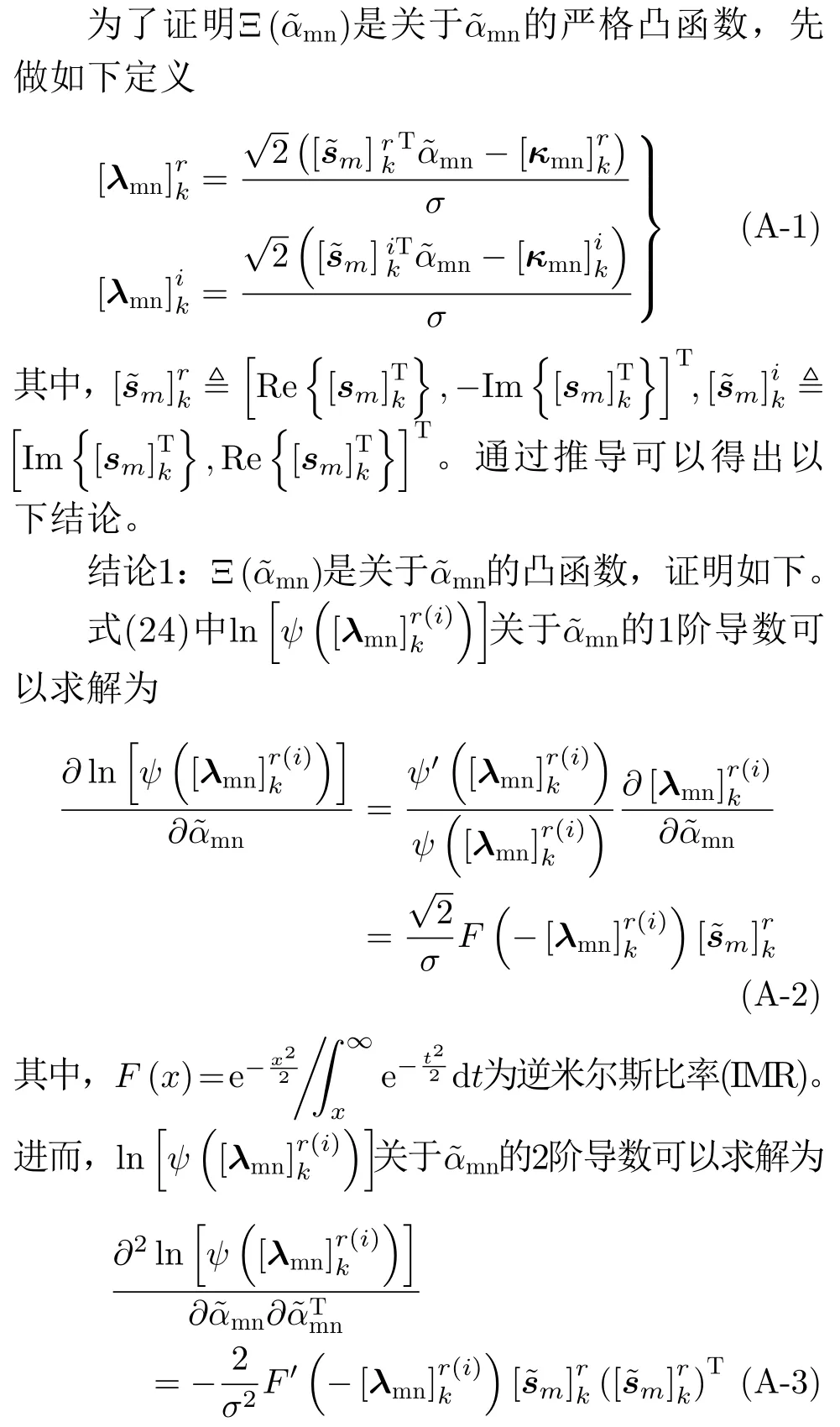
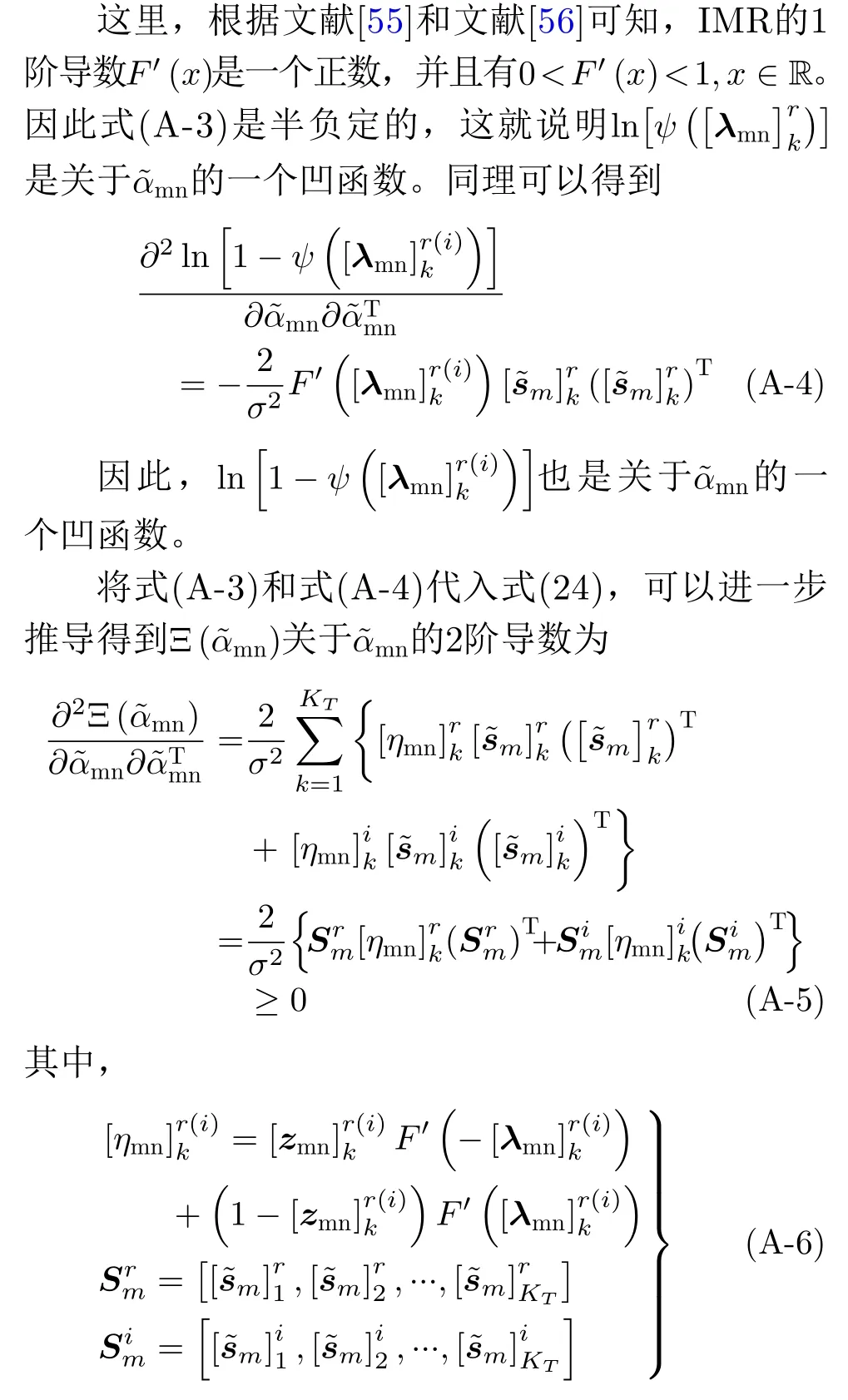
由式(A-5)可知,−lnℓ2(zmn;p,αmn)是关于α˜mn的一个凸函数。此外,通过利用发射波形的正交性,可以进一步推导出−lnℓ2(zmn;p,αmn)是关于α˜mn的严格凸函数,即下述结论2。
式(A-5)可以进一步整理为