电力铁塔高效攀爬机器人机械系统设计与物理样机开发
2022-01-04邹德华彭沙沙刘兰兰张宏伟
邹德华,彭沙沙,刘兰兰,江 维,张宏伟
电力铁塔高效攀爬机器人机械系统设计与物理样机开发
邹德华1,2,彭沙沙1,2,刘兰兰1,2,江 维*3,张宏伟3
(1. 智能带电作业技术及装备(机器人)湖南省重点实验室(国网湖南省电力有限公司输电检修分公司),湖南 长沙 420100;2. 带电巡检与智能作业技术国家电网公司实验室(国网湖南省电力有限公司输电检修分公司),湖南 长沙 420100;3.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073)
采用架空高压输电线路进行电力输送是远距离输送电力的重要方式,其安全稳定运行直接影响到电力供应质量。由于传统电力检修登塔时需借助敷设于铁塔主材上的金属轨道与钢绞线防坠落保护装置或者采用双安全带交替保护方式攀登铁塔至作业位置,存在效率低下、成本较高等问题。因此本文摒弃传统的工人防坠保护方法,创造性地引入智能机器人来辅助完成临时防坠装置的安装,实现对传统防坠方式的创新应用。本文提出了用于输电铁塔挂拆临时高空防坠保护装置用的智能机器系统,能够完成从地面携带防坠落装置沿铁塔主材攀爬至作业点位置并安装防坠绳挂拆装置,基于闭链连杆结构的运动学和作业空间仿真,验证了机械结构的可行性和有效性,开发了物理样机系统并进行了作业实验,在作业人员完成检修工作后拆除防坠绳装置并返回地面,完成防坠保护绳的挂拆操作,既可以保证工作人员的安全还能提高工作效率,对于电力企业来说具有巨大的经济效益。
电力铁塔;攀爬机器人;机械系统;物理样机
0 引言
电力铁塔[1-3]及电力线长期显露在野外,分布地点多,绝大部分远离城镇,所处地形复杂,自然环境恶劣,因受到持续的机械张力、风吹日晒、材料老化等影响,经常会出现断股、磨损、腐蚀、螺丝松动[4]等问题。随着电网迅猛发展以及输电线路走廊环境保护的加强,对电力铁塔和线缆等输电设备进行日常巡检与维护是有效保证输电设备安全、可靠运行的重要基础工作。目前电力铁塔和线缆等输电设备的巡检与维护主要是由专业作业人员进行,相关工作开展中需作业人员攀爬铁塔至高空中完成。然而,铁塔高度普遍超过30米,铁塔在设计建设中,仅不超过5%的铁塔安装有防坠轨道[5],且防坠轨道因安装工艺不到位常出现错位无法使用,作业人员攀爬铁塔劳动强度大,上下铁塔过程中因体力不支、触电、手脚踏空、注意力不集中等突发情况易发生高空坠落事故。因此,只有采取必要的防高空坠落安全措施,才能保证高空作业人员的人身安全。如果能够通过机械装置先行攀爬铁塔,并且携带吊钩以及绳索上塔,将其与铁塔的角钢等部件稳定可靠连接,那么该绳索就可以作为攀爬铁塔的工作人员的安全绳。吊钩与安全绳就组成了电力铁塔作业人员的可靠高空防坠落装置,从而为作业人员的安全保驾护航。
为实现机械装置攀爬铁塔,上世纪90年代后期,英国、以色列、西班牙、中国等国家先后开展了相关研究工作。在国外,西班牙卡洛斯三世大学[6]研制了八个自由度的ROMA攀爬机械装置,它采用步进式攀爬方式,利用机体两侧的夹爪实现与攀爬目标的固定与分离,但是其运行环境为规则的梁或柱状物体,难以适应复杂多变的三维空间结构物。英国的威尔士班戈大学[7]研究出了一种三段式电磁吸附铁塔攀爬机械装置,其中部可转向,头尾通过导向杆与中部连接,并通过齿轮齿条实现相对中部运动。由于缺少垂直于前进方向的自由度,该机械装置只能实现平面攀爬,不具备三维空间越障能力。以色列艾瑞尔中心大学[8]研制的电磁吸附式铁塔攀爬机械装置,具有八个自由度,采用多节串联机构,以蠕动方式运动,具有一定的越障功能。但结构复杂,空间适应性较差,效率较低。在国内,华南理工大学[9]研究了一种五自由度攀爬机械装置,由三个摆动关节,两个回转关节和两个末端夹持器串联而成,能够实现对各种杆件、桁架的攀爬,能实现尺蠖式、扭转式、翻转式前进与越障。但结构较大,难以适应复杂多变的空间结构,控制复杂且效率偏低。四川大学[10]研究了一种具有5个自由度的电磁吸附式电力铁塔攀爬的机械装置,能在铁塔角钢结构上实现尺蠖式、扭转式行走。因为机械装置足部的原因,机械装置只能通过夹紧角钢一侧进行攀爬,越障能力较差。此外,哈尔滨工业大学[11]研究的管外移动机械装置,该机械装置机构采用蠕动跨越式移动机构,可在一维、二维梁架环境下运动,具有较好的越障功能,但难以适应电力铁塔环境要求。
综上所述,上述电力铁塔及三维桁架结构物攀爬机械装置均采用多关节串联机构,通过控制关节的旋转、伸缩等实现机械装置尺蠖式、蠕动式、扭转式、翻转式行进及越障。但它们都无法实现上/下线和高压线路长距离巡检,无法适应高压线路中各种障碍物的跨越。因此,也极大制约了此类机械装置在高压线路巡检工作中的应用范围。因此,本文针对该问题对机器人提出了一种新的爬塔机器人基本构型及其铁塔攀爬方法,由于串联机械装置拥有作业空间大的优点和累积误差大的缺点;并联机械装置拥有精度高以及载重大的优点以及作业空间小的缺点。因此,本文在设计中将两者的优点相结合,可以满足铁塔攀爬以及线路巡检的要求。对于所提出的机构进行运动学分析和运动空间仿真,结果都表明作业空间能够满足爬塔运动和巡检要求,最后通过现场铁塔攀爬实验也验证了本文所提出机构的可行性和有效性。本文的研究是对电力检修检修维护的全新应用和探索,其研究和实施对于提升电力系统工作能效、推进电力系统自动化和智能化具有重要理论意义与实际应用价值。
1 铁塔攀爬机器人作业环境及构型设计
1.1 铁塔攀爬机器人作业环境
本文所研究的铁塔攀爬机械装置工作环境为电力铁塔,如图1所示。由于高压输电线路铁塔种类繁多,结构尺寸差异较大,因此,机械装置工作环境呈现为复杂多变的三维空间结构。机械装置机构和运动功能需要对上述复杂工作环境具有较强的适应性,并完成一系列的攀爬越障以及滚动行走。攀爬机械装置要经过输电塔体、输电塔笼、塔头、横臂。角钢类铁塔上的角钢主要通过螺栓连接或者通过焊接连连接,所以在铁塔上面就有焊缝、突出的螺栓和螺母等障碍。同时理想的角钢表面可以看作是一个平面,但是角钢可能因为长时间受力而发生变形。同时从塔笼到横臂也会由于焊接变形和连接变形而导致两个部分的角钢表面不在一个平面。

图1 铁塔攀爬机器人的作业环境示意图
1.2 铁塔攀爬机器人机械构型设计
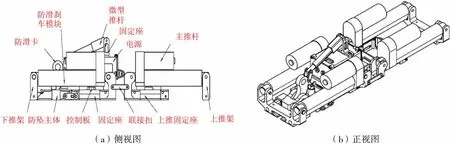
(a)侧视图(b)正视图
为满足上述爬塔需求,在有防坠轨道条件下,攀爬机械装置可沿防坠轨道进行攀爬,联想到我们现阶段在用的防坠器,可在防坠轨道上进行滑动,因此,可将机械装置做成类似防坠器的结构。初步结构设计如图2所示。
在机器人铁塔攀爬过程中,攀爬机械装置通过不断调整卡耳和电动推杆的位置,从而实现沿轨道攀爬,其运动形态仿真如图3所示。

图3 铁塔攀爬机器人运动仿真示意图
2 铁塔攀爬机器人的运动学建模与运动空间仿真分析
2.1 铁塔攀爬机器人的运动学建模

(2)
2.2 铁塔攀爬机器人的运动空间仿真分析

当最终求解的结果达到一定的数量以后,即可得到并联腿部的运动空间,且结果越多,求出的工作区间越精确。根据攀爬机械装置运动学正解和并联腿部正解,通过给定各个主动关节的角度,在MATLAB软件中进行仿真计算,取点云数N=1000,可以得到攀爬机械装置在三个方向上的工作空间点云图如图5所示,其中图5(a)是机器人三维运动空间图,图5(b)是x-y运动投影图,图5(c)是y-z运动投影图,图5(d)是x-z运动投影图。从三个方向的点云图可以看出,爬塔机器人的运动能够满足其攀爬电力铁塔的运动需求。
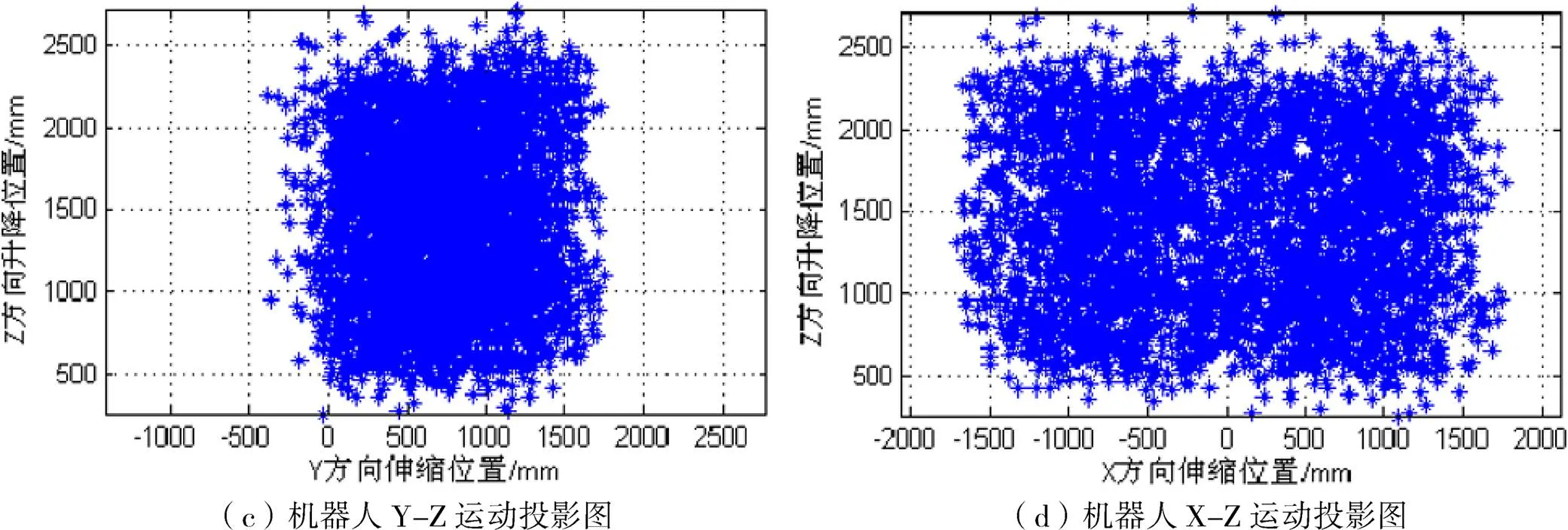
图5 铁塔攀爬机器人的运动空间意图
3 铁塔攀爬机器人物理样机开发与现场爬塔试验
3.1 铁塔攀爬机器人物理样机开发

图6 爬塔机器人物理样机模型
通过机械系统、测控系统、软件系统和视觉系统的集成设计,形成了GIS巡检机器人原理样机系统,其物理模型如图6所示。其中机械系统由机器人系统各部分连接机构组成,硬件系统主要由主控板、电机驱动、传感器系统及电源系统等组成,软件系统主要分为嵌入式控制层、通信交互层以及感知驱动层其具体结构如所示。采用系统分层的方法对控制系统进行设计能够做到各层级之间相互独立。层与层在设计上互不干涉,当某一层需要改动时其余各层之间不需要一同修改,能够极大的增强系统的可维护性,避免大量的重复工作,为之后的软件更新和系统升级提供了极大的便利。
3.2 现场铁塔攀爬实验与分析
在国家电网湖南省电力有限公司输电检修公司带电作业中心所辖的电力铁塔上进行模拟爬塔试验,现场试验整体流程为,首先工作人员将样机取下,在上塔人员准备上塔时,塔下人员安装上电池后把机器人架在导轨上,再打开电磁铁吸住导轨防坠。齐次,塔下人员检测4个主推杆和微型推杆是否能正常工作,检测样机的攀爬步态是否正常。再次,关闭电磁铁,挂上牵引绳,携带一定质量的重物,做抗冲击实验。完成抗冲击实验后上塔人员开始爬塔,塔下人员控制机器人挂上检修装备载物上升。最后,样机完成载物后,合上弹力扣,打开电磁铁,人工拉下样机,塔上人员下塔。

图7 爬塔机器人沿铁塔导轨的攀爬实验
分别用两组不使用机器对照试验来测量机器人爬塔相比于日常工作的提升,经过统计可知,使用机器人辅助工作人员爬塔缩短了11分钟的上下塔时间,具体对比图表1所示,除此之外还通过机器人载物减少了上下塔的工作人员的体力消耗。
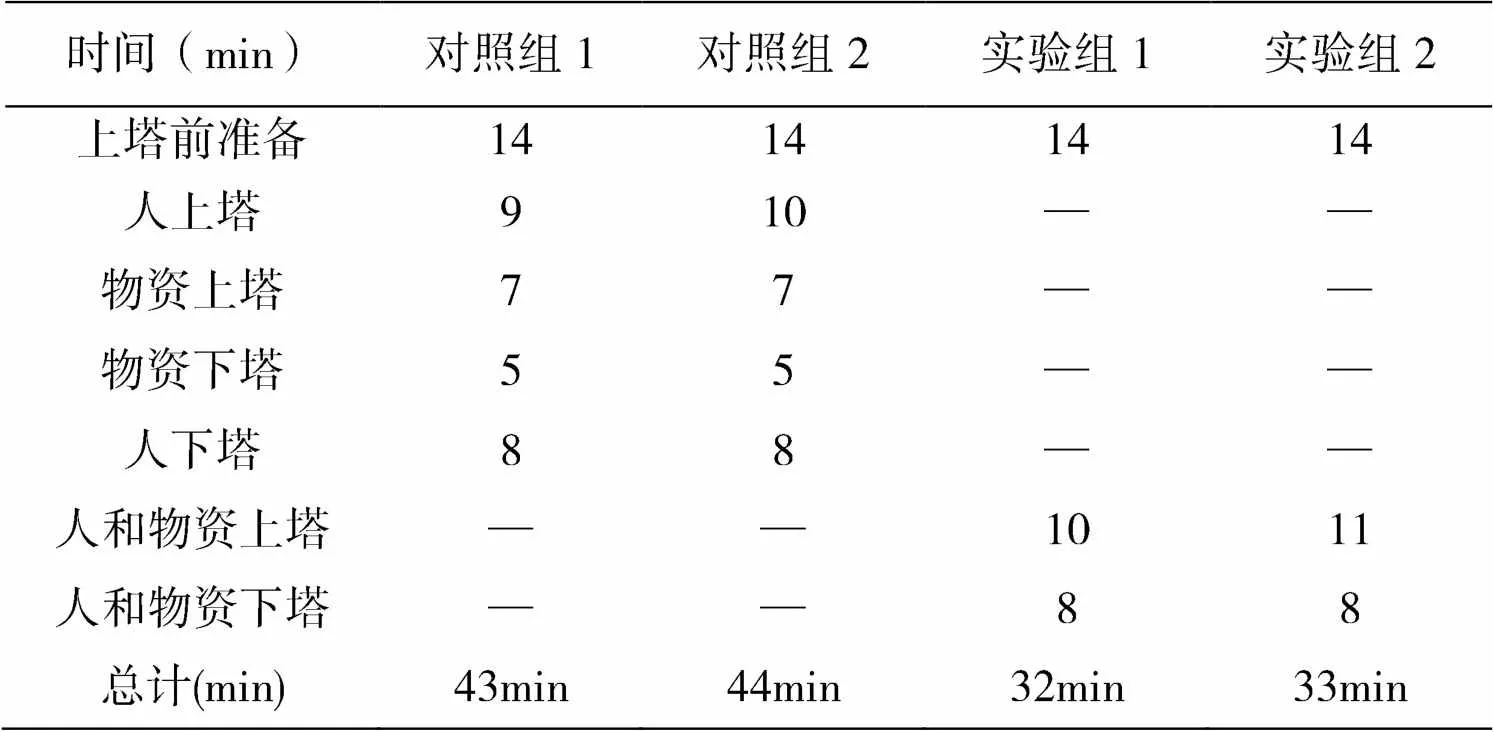
表1 使用机器和不使用机器对比分析
经过在不同天气及不同时间进行多次实验后得出结论,表明爬塔机器人可以实现在110KV及以上的输电铁塔上进行攀爬工作,并且可以稳定的载安全绳上塔,到达指定位置后可以启动防坠,且可以承受20kg以内重物,在下塔过程中需人工拉下,但对电磁铁的损伤较大,需定期更换,极大的节约了人力物力,使得爬塔的消耗大大减小。
4 结论
本文针对输电线路检修过程中人工电力铁塔的攀爬劳动强度大、效率低、易坠落危险性差的问题,基于闭链五连杆的基本模型设计了一种适用于输电线路电力铁塔攀爬的机器人基本构型,并开发了相应的物理样机系统进行了爬塔作业实验,提高了作业效率,同时大大增强了人员的爬塔安全性。但是,爬塔机器人也存在一定改进的空间,比如在雨天情况下无法有效的攀爬铁塔,不能实现完全自动化等,这些关键技术问题将是后续研究的重点。
[1] Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots [J]. Journal of Electrical Engineering & Technology, 2016, 11(5): 1412-1422.
[2] Yue X, Wang H, Jiang Y. A Novel 110 kV Power Line Inspection Robot and its Climbing Ability Analysis[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-10.
[3] 张兴杨, 鲁守银, 赵洪华, 等. 输电铁塔防坠保护装置装拆机器人系统研制[J]. 济南大学学报(自然科学版), 2019, 33(06): 564-571.
[4] 黄磊, 罗振军, 许文婧, 等. 一种爬塔机器人的设计、仿真与控制[J]. 工程设计学报, 2015, 22(05): 476-481.
[5] 耿亚丽. 输电杆塔攀爬机器人控制系统研究[D]. 济南:山东建筑大学, 2020.
[6] 赵慧如. 一种220KV输电铁塔攀爬机器人结构设计与分析[D]. 济南:山东建筑大学, 2020.
[7] 庄红军, 李军, 王威, 等. 电力铁塔攀爬机器人系统研究[J]. 自动化与仪器仪表, 2020, (04):199-204.
[8] 耿亚丽, 韦佳钰, 付渊, 等. 输电杆塔攀爬机器人运动学分析与仿真[J]. 山东电力技术, 2020, 47(03):7-14.
[9] 赵章焰, 李钟谷, 吴占稳. 攀爬机器人磁吸附组件优化设计与仿真[J]. 机械设计与研究, 2019, 35(05):184-189.
[10] 颜翠翠, 张浩浩, 韩欢, 等. 基于单片机的智能攀爬机器人的设计与实现[J]. 科技资讯, 2019, 17(07):33-34.
[11] 张宝庆, 朱人杰, 杨佳蒙, 等. 复合吸附方式的攀爬机器人吸附能力研究[J]. 机械设计与制造, 2016, (08):250-255.
Mechanical System Design and Physical Prototype Development of Power Tower Efficient Climbing Robot
ZOU De-hua1,2, PENG Sha-sha1,2, LIU Lan-lan1,2, JIANG Wei3, ZHANG Hong-wei3
(1. Hunan Province Key Laboratory of Intelligent Live Working Technology and Equipment (ROBOT) (State Grid Hunan Transmission Maintenance Company), Changsha Hunan 420100, China; 2. Live Inspection and Intelligent Operation Technology State Grid Corporation Laboratory(State Grid Hunan Transmission Maintenance Company), Changsha Hunan 420100, China; 3. School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430073, China)
The use of overhead high-voltage transmission lines for power transmission is an important way to transmit power over long distances, and its safe and stable operation directly affects the quality of power supply. Since traditional electric power maintenance and tower climbing require the use of metal rails and steel strand anti-fall protection devices laid on the main material of the tower, or alternate protection of double safety belts to climb the tower to the working position, there are problems such as low efficiency and high cost. Therefore, this paper abandons the traditional fall protection methods for workers, creatively introduces intelligent robots to assist in the installation of temporary fall prevention devices, and realizes the innovative application of traditional fall prevention methods. This paper proposes an intelligent machine system used for temporary high-altitude fall protection devices for the hanging and dismantling of power transmission towers. It can carry the fall prevention device from the ground along the main material of the tower to the operating point and install the fall prevention rope hanging and dismantling device. The kinematics and work space simulation of the chain link structure verified the feasibility and effectiveness of the mechanical structure. The physical prototype system was developed and the operation experiment was carried out. After the operator completed the maintenance work, the anti-falling rope device was removed and returned to the ground. The completion of the hanging and dismantling operation of the anti-fall protection rope can not only ensure the safety of the staff but also improve the work efficiency, which has huge economic benefits for the electric power enterprise.
power tower; climbing robot; mechanical system; physical prototype
江维(1983-),男,讲师,博士研究生,研究方向:电力作业机器人.
国网湖南省电力有限公司科技项目(5216AJ20000V).
TP242.2
A
2095-414X(2021)06-0054-06
