基于改进差分进化的多无人机协同航迹欺骗算法研究
2021-11-30丁柏圆郑凯元刘承禹李云鹏孙卫民游世勋
丁柏圆,郑凯元,刘承禹,李云鹏,孙 健,孙卫民,游世勋
(1.中国人民解放军96901部队,北京100094;2.中国航天科工集团8511研究所,江苏 南京210007)
0 引言
随着电子对抗装备与技术的不断提升与发展,海上作战的信息化程度也随之不断提高,其舰载雷达的智能化水平也得到了充足的发展[1]。航迹欺骗是一种十分有效的对抗舰载组网雷达的干扰技术[2]。它根据脉冲体制雷达的测距原理,通过控制假目标相对于雷达脉冲到干扰机的时延,产生指定位置上的假目标,随着干扰平台运动,累积的假目标点形成假目标航迹。文献[3]提出一种电子战无人机路径规划方法,建立了无人机干扰预警雷达模型,根据无人机和突防飞机相对预警雷达的角速度及其他约束条件求解出单架无人机最优路径。文献[4]从雷达干扰能量域角度出发,分析对雷达的干扰效果影响因素和无人机执行支援干扰任务时的部署要求,得出了无人机的兵力分配方法。文献[5]全面考虑环境威胁约束、机动性能约束和假目标干扰任务约束,利用综合轮盘法、最优保存策略和6种进化算子形成进化算法,对航路规划问题求解。但是以上方法均未考虑多无人机对雷达组网的欺骗效果以及无人机数量对航迹欺骗干扰策略的影响,使得无法利用有效数量的多无人机对组网雷达实施航迹欺骗。
本文围绕无人机数量对虚假航迹逼近度的问题,分析无人机协同运动约束,进行多无人机协同航迹欺骗问题建模,利用改进差分进化算法进行分层优化,为无人机智能协同干扰提供理论与实践参考。
1 多无人机协同航迹欺骗问题
无人机对雷达进行航迹欺骗干扰是考虑多架无人机对组网雷达系统的协同干扰问题,雷达将检测到的回波信号经过处理后形成航迹点状态信息(主要关心目标的空间位置信息)传输到融合中心,融合中心对5部雷达获取的目标状态信息进行“同源检验”,只要有3部以上雷达的航迹点状态信息通过了同源检验[6],即至少有3部雷达同一时刻解算出的目标空间位置是相同的,融合中心就将其确定为一个合理的航迹点,20个连续的经融合中心确认的航迹点形成的合理航迹,将被组网雷达系统视为一条真实的目标航迹。
本文预设一条虚假目标航迹数据,该虚假航迹数据包含20个时刻的虚假目标位置坐标信息,时间间隔为10 s。为实现较好的干扰效果,现限定每架无人机在该空域均做匀速直线运动,航向、航速和飞行高度可在允许范围内根据需要确定。讨论不同数量的无人机实现虚假目标航迹,具体分析每一架无人机的运动规律和相应的协同策略。
2 多无人机协同航迹欺骗模型
2.1 数学模型
在实现航迹欺骗的干扰方案中,假设无人机的数量为M,其中某一部无人机用m(m=1,2,…,M)表示;假设雷达的数量为N(N=5),其中某一部雷达用n(n=1,2,…,N)表示,令无人机对雷达产生干扰的策略对为policy(m→n),因此,在任意采样时刻t,多无人机产生的干扰分配策略为S,S是一个由{0,1}组成的M×N的矩阵。
生成每个虚假航迹点均需要3部雷达同时通过“同源检测”,即至少需要3部无人机对相应雷达成功进行了干扰。3部雷达被成功干扰时各无人机的空间分布图如图1所示。
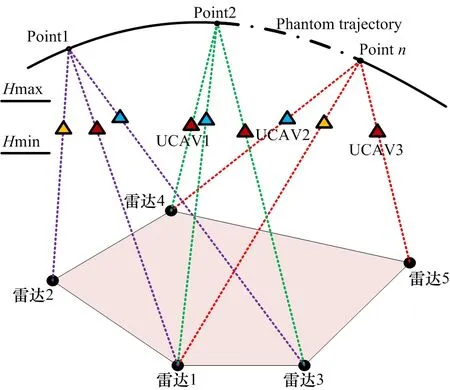
图1 无人机与雷达空间分布
从图1中可以看出,虚假航迹上的每个点处均有至少3条雷达-无人机延长线相交。以无人机1为例,假设在生成第一个虚假目标位置点时无人机1对雷达1进行了干扰,则可以确定无人机1的初始位置位于雷达1与第一个虚假目标位置点的连线上,且高度处于某一范围之间。一旦给定无人机的初始位置和速度,便能确定整个运动轨迹。在某个时间点,将无人机的运动轨迹点与各个雷达分别连接并延长,求取相应虚假航迹点到各条延长线的距离D m,n,(m=1,2,…,M;n=1,2,…,N),如图2所示。其中D m,n越小,则表明该时刻无人机具备产生要求的欺骗点的潜力越大,若在t时刻,要求的欺骗航迹点为P t,则对无人机m而言,生成最相似的航迹点的干扰策略为:

图2 生成航迹示意图

且当该距离D m,n(P t)为0时,即表明无人机m与雷达n的连线刚好穿过该虚假航迹点。
由分析可知,在生成虚假航迹过程中包含了2种不确定性:
1)每个时刻无人机对雷达进行选择性干扰的不确定性,即策略的随机性。因为在每个采样间隔内,针对每部雷达,所有位于其作用范围以内的无人机均可以选择对它进行假目标干扰,所以极大增加了干扰策略组合的复杂性。
2)各个无人机初始状态信息(包括位置和速度)的不确定性。各无人机均在相应空域中做匀速直线运动,但是每部无人机的速度大小/方向和起始位置都是随机的,所以初始状态的不确定性便包含了无人机航迹的不确定性。
2.2 约束条件及目标函数
为了尽可能准确地拟合出给定的虚假航迹,需要进行2个层面的寻优。
第一层寻优的目的是要在每个采样时刻为无人机组确定最佳干扰策略。基本思路为取出与任意3个无人机相对应的Dmin并使其和为最小。假设t时刻,目标航迹点P t和所有可能的D m,n产生的距离矩阵为D,则目标函数f i t为:

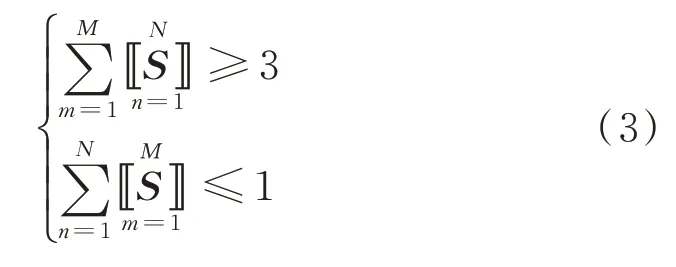
实现最优干扰策略所受的约束为:必须至少有3部雷达同一时刻解算出的目标空间位置相同时,融合中心才将其确定为一个合理的航迹点。所以目标函数中的3部雷达必须各不相同才能满足生产航迹点的条件,且同一时刻1架无人机只能干扰1部雷达,即:
第二层寻优的目的是为每架无人机指定最优的航行路线。如前文所述,由于所有无人机均在相应空域中做匀速直线运动,所以只需要确定各架无人机的初始位置和初始速度信息便可确定其整个航行路线。本层寻优的基本思路是不断调整各架无人机的初始运动参数,使得所有时刻最优策略下的目标函数f i t(S t)之和达到最小。则最终的目标函数F I T为:

式中,T为总动作规划的时长,为20个采样周期。
实现动作规划所受的约束为:为了更准确地生成给定航迹,在选取无人机初始位置时,应满足无人机位于第一个虚假航迹点和目标雷达的连线或延长线上。假设无人机m在初始时刻选择对雷达n进行干扰,则该无人机的初始位置点和雷达n位置点以及第一个虚假航迹点满足直线方程:

式中,无人机初始位置坐标为(x m,1,y m,1,z m,1),雷达n位置坐标为(x n,y n,z n),第一个虚假航迹点位置坐标为(P1,x,P1,y,P1,z),且单位都为km。并且,无人机飞行速度需满足:

式中,Vmin表示无人机最小飞行速度,Vmax表示无人机最大飞行速度。无人机飞行高度需要满足:

式中,zmin,t表示无人机最小飞行高度,zmax,t表示无人机最大飞行速度。生成虚假航迹的无人机必须位于其干扰的雷达n探测范围之内,即二者之间的距离必须小于雷达最大探测距离Rmax:

3 基于改进差分进化算法的多无人机协同航迹欺骗算法
分析上文所建模型可知,该问题中变量结构较为复杂,既包含连续变量(无人机运动参数)又包含离散变量(各个时刻无人机的干扰策略),考虑差分进化(DE)算法的全局搜索能力较强,需设置的超参数数目较少且可操作性强等优点[7],选择该算法对问题进行求解。
3.1 差分进化算法
DE是一种高效启发式进化算法,采用浮点实数矢量编码的方式在连续空间域内对问题的解进行捜索并优化。该算法采用全局性的捜索策略,通过分别基于差分形式和概率选择的变异操作和交叉操作来引导种群的进化过程。整体的算法流程可以简要概括为种群初始化、变异操作、交叉操作和选择操作4个方面。
3.2 改进的混合差分进化算法
1)种群初始化
DE作为一种基于群智能的优化算法,其特点为每个种群中都有多个个体,且每个个体向量都代表了问题搜索空间的一个可行解。在对种群进行初始化时,为了使其能够尽量覆盖整个搜索空间,不妨在参数限定的有限空间内对个体进行均匀的随机化。本文无人机航迹欺骗干扰需要对其干扰策略进行求解,因此构建解空间编码方案。
第一层优化:对于目标函数f i t,寻优的对象是干扰分配策略,即单纯的对策略矩阵S进行求解即可。
第二层优化:由目标函数F I T的形式可知,原始的差分进化算法是无法直接使用的,需要对干扰策略和运动方式进行编码,编码方案如下:
①在满足式(10)中约束的条件下随机生成初始的干扰策略;
②随机生成一个比例系数,且使每部无人机的高度满足约束;
③随机生成初始速度,且使每部无人机的速度满足约束;
④随机生成初始速度向量,且使每部无人机最终的位置满足约束。
由此生成的编码方案可用一个M×6的矩阵如图3所示。

图3 编码方案
2)变异操作以及修正
第一层优化:由于编码空间是离散的,为了增强DE算法搜索能力,采用的变异策略为:

式中,尺度因子F为1。如果变异后的个体在数值上小于1或者大于N,分别采用加N和减N的方式,使其依然在边界内。如果修复后<3则重新生成一组符合约束的策略。
第二层优化:此时的编码方案是离散空间以及连续空间的混合,依然采用式(11)的策略,此时令F=0.6。
在编码矩阵的第1列,如果变异后的个体在数值上超出边界(1,N),采用第一层优化的方法进行修正;在矩阵的第2列,对超出边界(0,1)的数值进行裁剪;在矩阵的第3列,对超出边界(Vmin,Vmax)的数值进行裁剪;对矩阵的第4~6列,需要先检验当前行所代表的无人机,以z方向的分量vz进行运动时是否会超出边界:

式中,τ是单位采样时长,为10 s;h是当前无人机的高度。然后对超出边界的vz进行裁剪,最后因为速度向量的模必须为1,最后利用同时进行比例修正。
3)交叉操作
第一层优化:对于矩阵S,由于每一行的结构是固定的,希望交叉时不破坏每一行的结构,故采用以下方式:
随机选取2个个体,再随机生成一个行号mr,然后判断将个体2的该行与个体1的该行进行交换后,个体1是否仍满足式(4)的约束,若满足,则交叉操作执行,否则不执行。
第二层优化:和第一层的交叉方法一致。
4)选择操作
为保证在种群迭代时当前群体的规模不发生变化,DE算法采用贪婪选择机制对目标向量与试验向量进行选择。挑选其中适应度比较好的向量进入下一代种群。最终得到的基于改进差分进化算法的多无人机协同航迹欺骗算法流程图如图4所示。
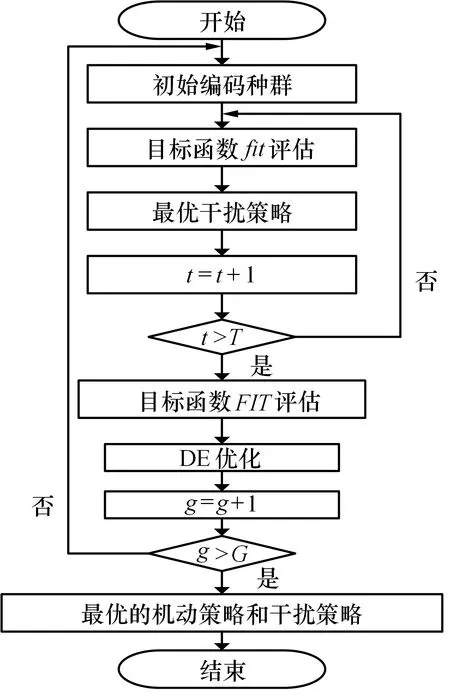
图4 基于改进差分进化算法的多无人机协同航迹欺骗算法流程图
4 仿真分析
本文对无人机架数M=3,4,5,6时的运算结果进行对比分析,且对于第一层优化,设置种群数量为20,最大演化代数为1 500;对于第二层优化,种群数量为100,最大演化代数为1 500。算法生成航迹与给定航迹之间的平均误差与最小误差随进化代数的增长而下降,相应的误差收敛曲线如图5所示。
从图5中可以看出,当无人机数量确定时,随着算法迭代次数的增加,目标函数的适应度值不断下降,为了进一步提高算法的计算效率,算法规定,当平均误差与最小误差之差小于等于1×10-10或进化代数达到设定的上限时,算法终止进化过程。可以看出,随着无人机数量的增加,算法按照规定收敛的迭代次数也随之增加。这是因为随着无人机的数量的增多,目标函数中解空间的维度也进一步扩大,导致计算复杂度增大,又由于DE算法中的种群数量是有限的,因此在进行迭代寻优时,对于数目较多的无人机,需要更多的迭代次数才能满足收敛要求。
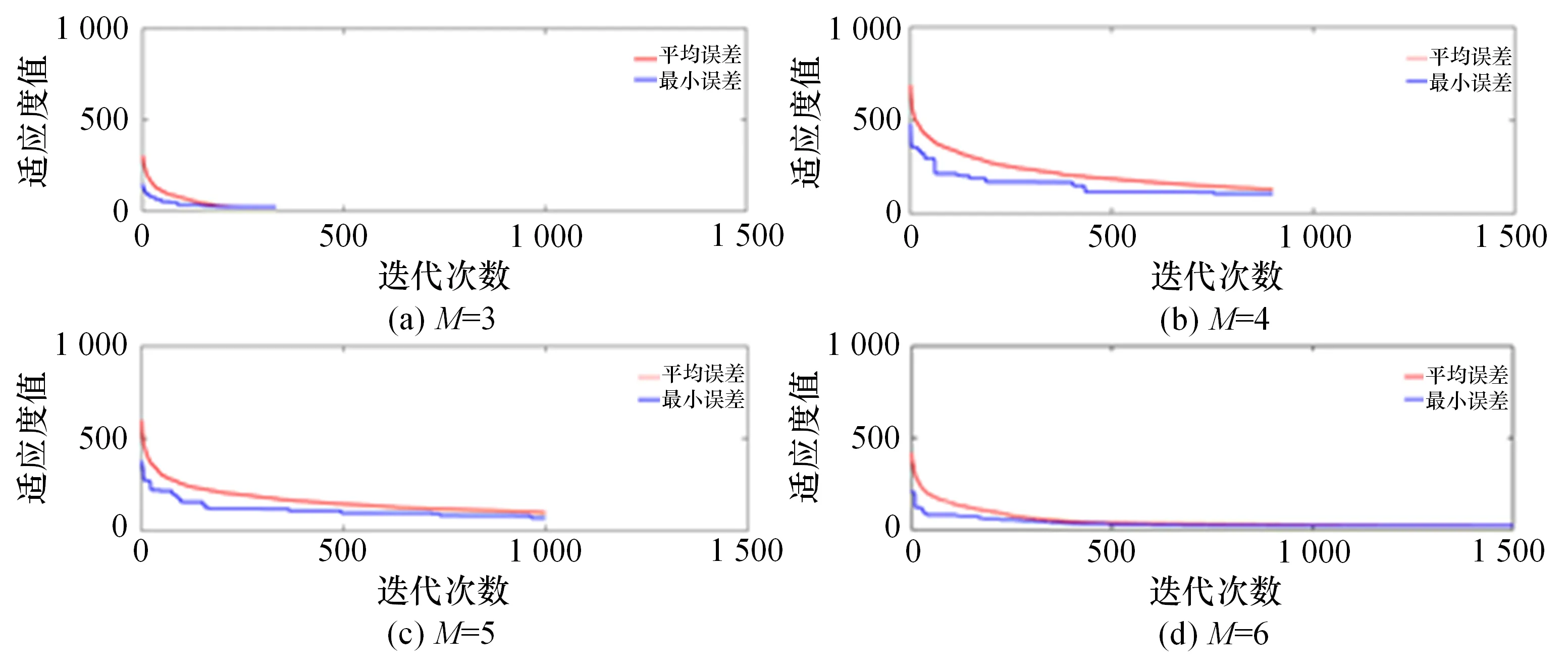
图5 M=3,4,5,6时生成的算法收敛特性
生成最终虚假航迹各架无人机采用的干扰策略,即各个时刻无人机组选择进行干扰的雷达编号如表1—4所示。其中加粗的数字编号代表在当前时刻贡献为虚假航迹的干扰策略。

表1 M=3无人机干扰策略
当采用不同架数的无人机进行干扰时,生成虚假航迹的精度不同。在M=3,4,5,6时对应的均方误差RMSE如表5所示。

表5 均方误差
从以上的分析内容可知,在本模型中,当无人机数量小于5部时,采用的干扰策略无法实现协同工作,因此生成的虚假航迹几乎没有变化。而当无人机数量大于5时,生成航迹和目标航迹之间的误差开始大幅度减小,且对应的干扰策略也充分体现了多无人机协同作战。故可以认为,在给定阈值内,用匀速机动实现目标航迹是可行的。求得的各架无人机最优初始状态如表6所示。
从表6中可以看出无人机1的初始状态干扰对象为雷达2,无人机2的初始状态干扰对象为雷达3,无人机3的初始状态干扰对象为雷达3,无人机4的初始状态干扰对象为雷达1,无人机5的初始状态干扰对象为雷达4。最终得到M=5时生成的虚假航迹与目标航迹空间分布图如图6所示。

表2 M=4无人机干扰策略

表3 M=5无人机干扰策略
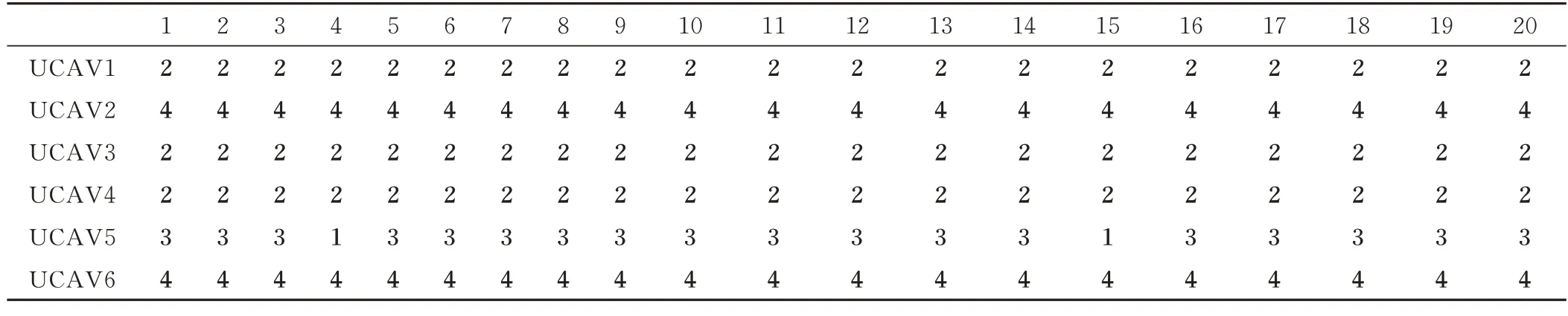
表4 M=6无人机干扰策略
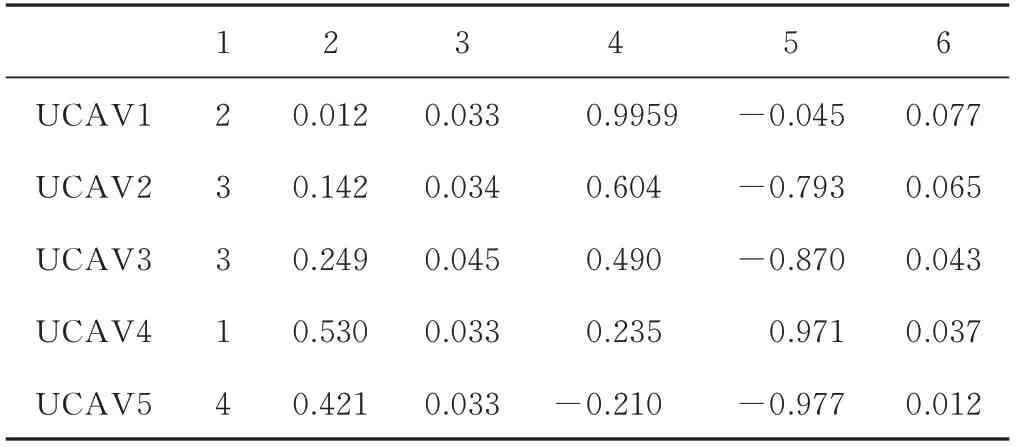
表6 M=5无人机的最优初始状态
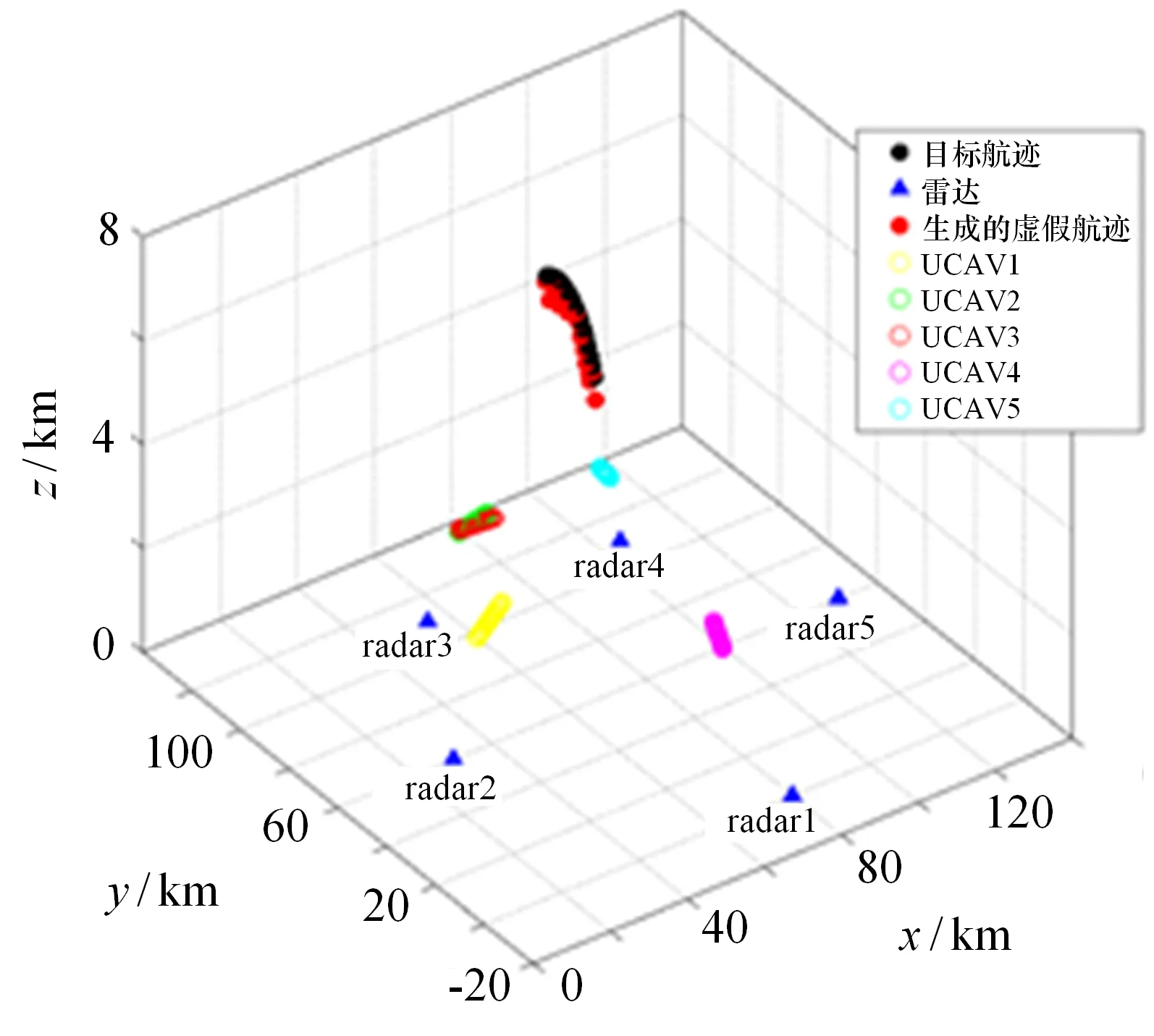
图6 M=5时生成的虚假航迹与目标航迹空间分布图
5 结束语
本文提出了一种基于改进差分进化的多无人机协同航迹欺骗算法,该算法通过建立多无人机航迹欺骗模型,分析运动约束,进行多无人机协同航迹欺骗问题建模,并给出无人机航迹欺骗干扰策略和运动方式的编码描述方法,利用改进差分进化算法对其进行寻优,实现对舰船编队组网雷达的有效航迹欺骗,从而提高对抗装备的智能化水平。