不同布局无人作战飞机电磁隐身性能分析
2021-11-23刘战合罗明强夏陆林
刘战合, 罗明强, 夏陆林, 周 鹏, 杨 朋
(1.郑州航空工业管理学院航空工程学院, 郑州 450046; 2.郑州航空工业管理学院无人机研究院, 郑州 450046; 3.北京航空航天大学航空科学与工程学院, 北京 100191; 4.郑州航空工业管理学院智能工程学院, 郑州 450046)
无人机已成为现代战争的重要武器平台,广泛用于执行侦察、反恐、预警、对地攻击、空中作战等军事任务[1-4]。无人作战飞机通常以夺取制空权的空中作战或格斗为主要任务,可兼顾对地打击、反恐、侦察等任务,成为当前和未来空中武器平台的主要组成部分[5-7],如美军X-45A、X-45C,法国达索公司神经元等,部分无人作战飞机也通常被称为察打一体无人机,如捕食者、彩虹等。
隐身技术可有效提高飞行器突防能力,成为无人作战飞机采用的重要技术手段[8-10],不同布局无人作战飞机具有不同的气动、隐身性能,是多种技术需求的高效综合[4,7]。隐身性能主要包含电磁隐身、声隐身、可见光隐身、红外隐身等,当前无人作战飞机主要考虑电磁隐身,也是研究的重点。针对战斗机[1,8]、飞翼布局飞行器[2,5,7]等,已有学者进行了部分研究,但不同布局无人作战飞机的电磁隐身性能研究较少。随着无人机技术的迅猛发展,面向空中格斗的无人作战飞机将成为空中主要作战力量,有必要从不同布局结构特点出发,研究并掌握隐身性能与作战任务、布局设计等的影响关系。
针对现有投入战场使用的3种典型气动布局无人作战飞机,采用物理光学法(physical optics,PO)[6-7,10-11],以研究3种典型布局无人作战飞机的隐身性能,结合雷达散射截面(radar cross section,RCS)[10,12]曲线、不同威胁角域下的RCS算术均值及其变化规律,并分析RCS曲线分布、不同入射频率、不同姿态角下的电磁散射特性与布局设计的对应关系,以进一步改善无人作战飞机的生存力。
1 无人作战飞机电磁分析模型
当前,以攻击性为目的的无人机研究和应用呈上升趋势,如中国的彩虹系列、翼龙系列,美军捕食者A、捕食者B、X-45A、X-45C、X-47B、复仇者、A-10、幻影射线等,法国达索公司的神经元无人机等。通过对以上无人机进行分析,基于布局设计考虑,将其分为3种,分别建立电磁布局A、B、C[6-7],分别对应螺旋桨动力常规布局(如中国彩虹、美军捕食者A、捕食者B等)、机动性能较好的无尾飞翼布局(美军X-45A、X-47B等,采用分段式平行前缘、涡扇动力)、三角形飞翼布局(法国达索神经元无人机、美军X-45C、美军A-12等,采用翼身融合度较高设计、涡扇动力)。分别以捕食者B、X-45A、神经元无人作战飞机为参考,完成电磁建模,几何尺寸分别为:布局A机身长10 m、翼展14 m、高3 m、机翼无后掠、双垂尾斜置,布局B机身长8.0 m、翼展12.5 m、高0.95 m、后掠角41.3°,布局C机身长10 m、翼展12.5 m、高1.9 m、前缘后掠角60°、后缘后掠角38°。3种布局无人作战飞机的三维实体电磁模型如图1所示。

图1 3种布局无人作战飞行器电磁模型Fig.1 Electromagnetic computation models of aircrafts
结合各类无人机作战环境特点,执行任务过程中,可能面临来自海基、陆基、空基等多平台探测器威胁,为提高无人作战飞机战场生存能力,有必要考虑探测器威胁角域、电磁波入射频率等因素,从无人机角度出发,将俯仰角范围设置为-15°、-10°、-5°、0°、5°、10°、15°,方位角范围为0°~360°,电磁波入射频率设定为1、3、6、10、15、18 GHz。同时,由于高频区RCS曲线一般呈现较为剧烈的起伏现象,研究中结合无人机有重要影响的几个角域:前向30°(H-30)、侧向30°(S-30)、后向30°(T-30)、周向360(W-360)角域,以对应角域RCS算术均值为研究对象,结合其幅值大小、变化规律、RCS曲线分布规律,详细分析几类典型布局无人作战飞机的隐身性能及电磁散射特性。
2 基于PO的电磁散射计算方法
一般来说,RCS计算效率和精度在很大程度上取决于计算目标电尺寸,即目标典型几何尺寸与入射电磁波波长之比,根据电尺寸大小可将电磁散射分为低频区(瑞利区)、谐振区和高频区。为平衡计算效率和精度,不同的散射区域会采用不同的电磁计算方法,基于积分方程法的矩量法(method of moments,MOM)[13-14]、时域有限差分法(finite difference time domain method,FDTD)[14]、有限元法等均具有较高的计算精度,适用于低频区精确求解,为提高计算精度,MOM的快速改进方法-多层快速多极子算法(multilevel fast multipole algorithm,MLFMA)[12-13]极大提高了计算效率,将积分方程方法的求解区域提高至谐振区和部分高频区,但在高频区尤其是超高频区,MLFMA计算效率极大降低,同时会损失一定计算精度。
物理光学法与矩量法同样基于积分方程,保留了矩量法计算过程中的自耦合作用,而将对计算结果影响绩效的互耦合作用忽略,即忽略目标部件之间的相互耦合作用,以快速提高计算效率,适用于光滑目标电磁散射计算。以上假设条件尤其适用于高频区,从散射机理来看,电大尺寸尤其是超大电尺寸目标,目标各部件间的耦合散射相对自耦合影响较弱,这使得物理光学法在高频区具有较高的计算精度,保留了矩量法等精确算法的部分计算精度。
基于以上考虑,由于3种布局无人机具有表面光滑的特点,处于高频区,其局部结构间的耦合散射影响可忽略,适用于物理光学法的快速计算分析。基于目标网格划分,按相位叠加对所有散射面元即网格面元求和得[6-7,10]

(1)


(2)


分别为电磁波入射方向单位矢量、散射方向单位矢量;
分别为接收雷达电场单位矢量、发射雷达磁场单位矢量;r为从局部源到计算面元的位置矢量。
对电磁分析布局A、B、C,入射电磁波频率1、3、6、10、15、18 GHz时,布局A对应电尺寸分别为46.7、140、280、466.7、840 m,布局B和模型C典型几何尺寸均为12.5 m,电尺寸相同,分别为41.6、125、250、416.7、625、750 m,均为典型的电大尺寸目标,处于高频区,适用于采用物理光学法进行计算分析。
3 RCS散射曲线分布特性
3种无人作战飞机从动力装置、气动布局、作战特点等角度来看,具有较大区别,布局A为前期侦察机的衍生,采用螺旋桨为动力,具有察打一体特点,同时采用大展弦比机翼设计以实现较好的巡航性能;相对而言,布局B和布局C采用涡扇动力,具有更高的速度优势和打击能力,同时结合表面吸波材料涂覆以提高翼身性能。结合以上无人机特点,重点从电磁隐身角度进行分析。
入射电磁波频率为6 GHz、俯仰角0°时,3个电磁模型的RCS计算曲线如图2所示。

图2 入射电磁波频率为6 GHz时3个模型RCS计算曲线Fig.2 RCS curves of three models when the incident electromagnetic wave is 6 GHz
可以看出,对无人作战飞机布局A,其RCS曲线沿周向360°分布有4个散射波峰,分别位于前向0°、侧向0°、后向180°、侧向270°方位角上,该分布特点与其布局有直接关系。前向0°附近散射波峰为无人机头部、机翼和垂尾前缘散射综合贡献,为提高低速巡航性能和机动性能,机翼并未采用后掠方式,其前缘成为前向0°附近角域上散射波峰主要贡献;侧向90°和270°角域附件的散射波峰为机身侧面、机翼翼尖侧面及垂尾的贡献,贡献较大者为机身侧面及机身侧面与机翼翼根形成的二面角散射,而由于机翼翼尖侧面面积较小、垂尾斜置,故二者贡献较小;后向180°附近角域散射波峰较强,这是由于机身后端面及发动机端面的镜面散射效果,同时,机翼、垂尾后缘也有一定贡献。
与布局A散射形成对比,布局B采用翼身融合、多段前缘和后缘平行技术、进气道唇口锯齿化处理等外形隐身技术,其RCS散射曲线分布特点有较大变化。由于采用机翼后掠及隐身融合,其前向30°角域上,并未出现散射波峰,总体来看,沿周向分布6个较强波峰,沿机身轴线对称分布于方位角46°附近,且波峰较窄,为机翼前缘、机身、进气道结构部分的散射叠加;侧向方位角90°附近波峰产生机理与布局A类似,为机身、进气道侧面等的贡献;方位角140°附近存在一较强散射波峰,为机身后端面、机翼翼尖侧面积、机翼后缘、尾喷口端面的叠加贡献。
模型C与布局B均为飞翼布局,但模型C布局更简单,采用类似三角形布局飞翼布局形式,考虑到气动性能、隐身性能,前后缘后掠角不同,与布局B相同,进气道位于机身背部,以减小进气道、发动机产生的雷达、红外信号,提高电磁、红外隐身性能。从RCS曲线来看,前向和后向30°角域上并未出现散射波峰,这与布局B相同,说明两种布局在前向和后向均有较好的隐身性能。与布局结构相关,模型C在方位角40°、120°附近沿机身轴线对称分布4个散射波峰,由于前后缘后掠角并不相同,同时机身背部进气道结构相对较大,引起散射波峰宽度的增加,40°波峰为机翼前缘、机身、锯齿化进气道唇口的散射贡献,120°散射波峰为机翼后缘、机身后端面、尾喷口锯齿后端面的综合效果。
综上分析可以看出,从隐身性能角度来看,尽管散射波峰数目较少,但布局A在前、后向均有散射波峰,不具备较好电磁隐身性能,而飞翼布局的布局B和C在前、后向角域上均具有较好的隐身性能,布局B采用了平行分布的外形设计手段,散射波峰较窄,而模型C为了取得更好的高速性能,采用了更大的后掠角和不同的前后缘后掠,结合背部进气道结构,增加了散射波峰宽度,但模型C在侧向由于较好翼身融合,散射强度较小。
4 RCS曲线频率和俯仰角响应特性
就当前无人作战飞机来说,多执行反恐作战、局部战争、对地攻击、空中作战及战略战术侦察任务等,飞行过程中,将面临来自方向上(对无人机而言,可以从不同方位角、俯仰角来研究)的不同频率的雷达探测。由于方位角在RCS计算时已经考虑,因此对无人作战飞机而言,可从电磁波频率和俯仰角两个维度来进行研究。根据三种无人作战飞机模型布局特点,以布局A来研究频率对RCS曲线的变化影响,而以模型C研究俯仰角的影响特性。
俯仰角为0°时布局A的3、10、15 GHz的RCS散射曲线如图3所示。

图3 布局A多频RCS计算曲线Fig.3 RCS curves with different frequencies of model A
考虑到多频散射规律可区分性,图3以3、10、15 GHz入射频率进行研究,可以看出,频率变化时,同一布局的散射曲线分布即波峰、波谷及曲线沿周向的分布规律不变,不同入射频率的RCS散射曲线具有较大的相似性,由于研究对象处于高频区,而高频区内的电磁散射机理在频率变化时并未发生较大变化,因此曲线分布规律相似。图3也可以看出,电磁波入射频率增加时,RCS散射曲线向内有一定压缩,这一现象表现在波峰位置为波峰宽度变窄,波峰较为尖锐,且幅值有一定较低,但并未影响波峰位置方位角,即对分布特性影响不明显;同时,频率增加时,RCS散射曲线振荡较为剧烈,说明无人作战飞机的各个部件的电磁耦合逐渐明显,以上特性尤其在前向和后向一定角域表现突出。从隐身角度来看,频率增加时,RCS减小,且散射波峰变窄,幅值减小,其电磁隐身性能有一定增加,但并未改变其隐身性能本质。
与多频散射特性研究方法类似,入射电磁波频率3 GHz时,模型C俯仰角为-15°、0°、-15°的RCS计算曲线分别如图4所示。

图4 入射电磁波频率为3 GHz布局C不同俯仰角 RCS计算曲线Fig.4 RCS curves in different pitch angles of model C when the incident electromagnetic wave is 3 GHz
如前所述,布局B和C在气动布局上,均采用了飞翼布局,以模型C为研究对象,研究俯仰角的电磁散射响应特性。图4表明,对模型C,迎角分别为-15°、0°、15°时,电磁散射曲线变化较小,其分布特点和表现形式基本一致,3条曲线重合度较高。观察曲线分布情况,从角域分布来看,在前向和后向一定角域上,较小的俯仰角不至于引起RCS曲线和幅值的较大变化,即隐身性能能保持较高的水平,分析认为是由于电磁波以较小俯仰角入射时,并未引起电磁散射机理的明显变化,且机身头部、进气道、尾喷口均采用了外形隐身技术,影响较小。而在其他角域上,尤其对称分布的4个峰值附近,可以看出,俯仰角变化时,其RCS有一定增加,这是由于该方位角上,为机翼前缘、机身侧向、进气道唇口或尾喷口端面的截面镜面散射贡献,而俯仰角较小变化时,该部分面积有一定增加,从而增强电磁散射幅值,但由于机理并未产生剧烈变化,因此并不影响散射曲线分布特点和形式。
5 不同角域散射特性分析
5.1 RCS算术均值
结合前述的RCS曲线分布研究,对隐身性能,还需从其幅值大小、威胁角域等方面进行详细分析,基于重点关注角域RCS算术均值及幅值变化规律,进一步研究无人作战飞机的电磁隐身性能。一定角域内,RCS算术均值可以量化表示该角域内的电磁散射幅值大小[6,10],可表示为
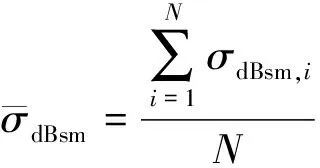
(3)
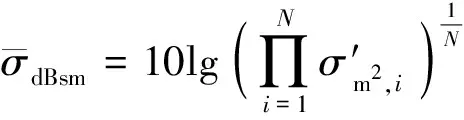
(4)

5.2 不同角域RCS算术均值
对3种无人作战飞机电磁模型,基于RCS数据计算了不同俯仰角、不同频率状态下重点关注角域H-30°、S-30°、T-30°、W-360°的算术均值,以分析各布局模型在对应角域上的RCS幅值及变化规律,进而分析隐身性能。限于篇幅并与图3、图4形成区别,表1和表2列出了布局A在3 GHz时不同俯仰角状态、模型C在俯仰角0°时不同入射频率的RCS算术均值。
分析以布局A为常规布局、C为飞翼布局,从表1可以看出,俯仰角在较小范围内变化时,各向角域RCS算术均值均有一定变化,对H-30°角域,RCS算术均值随俯仰角变化呈振荡趋势,在-15°、0°、15°俯仰角最小,其余俯仰角情况较大,变化范围-14.914 7~-8.718 7 dBsm,从RCS算术均值来看,均值较小,结合RCS曲线分布,可以看出,该角域上无人机正前向0°附近存在一较大散射波峰,最高值接近20 dBsm左右,由于波峰较窄,前向30°角域上算术均值平均化,因此其前向隐身性稍差。侧向S-30°角域上,由于散射机理并未产生实质改变,俯仰角变化时,算术均值未发生较大变化,变化区间在-7.909 4~-4.406 8 dBsm,俯仰角变化时,仅双垂尾侧面方向的改变对其造成了较大影响,从而改变了散射幅值。而在后向T-30°角域上,布局A建模时,机身后端面采用平面进行近似,结合机翼后缘、垂尾后缘及机身结构部分,共同对后向T-30°角域有贡献,而俯仰角变化时,机身后端面部分镜面散射贡献逐渐降低,因此,RCS算术均值在俯仰角0°附近时为-0.876 1~1.152 3 dBsm,而俯仰角继续增大时,RCS算术均值降低为±15°俯仰角的-10 dBsm左右。周向W-360°上为所有方位角RCS的均值,表示了全部周向隐身性能的大小,RCS算术均值基本在-16 dBsm左右,俯仰角变化时,RCS算术均值变化较小,说明较小的俯仰角变化并未从根本上改变电磁散射耦合机理,仅部分散射大小有一定变化。
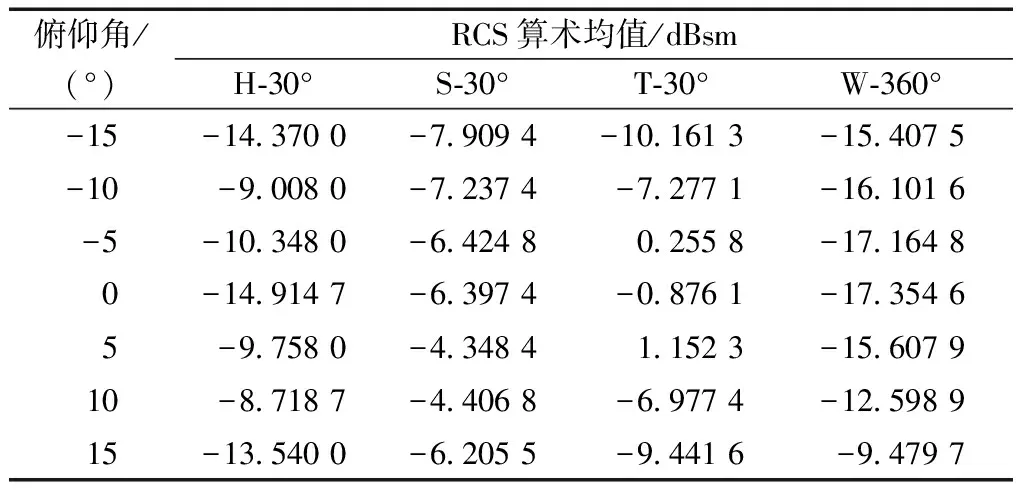
表1 布局A不同俯仰角的RCS算术均值
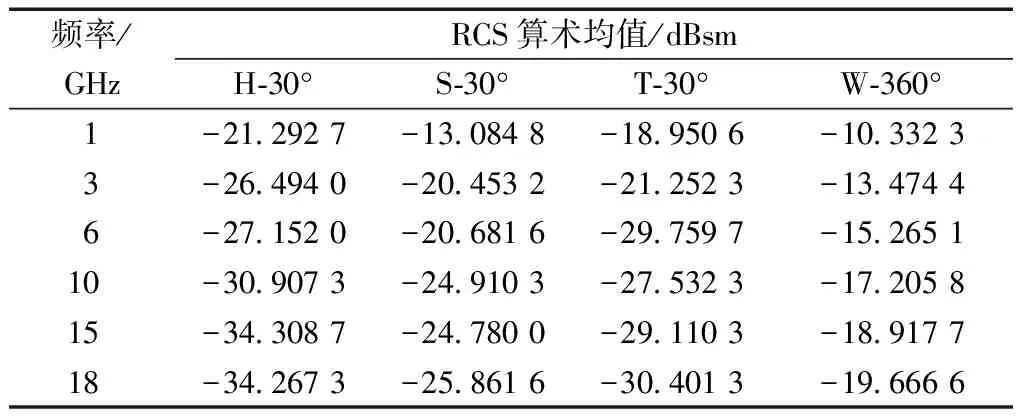
表2 布局C不同频率的RCS算术均值
与俯仰角响应特性形成对比,表2为布局C在1~18 GHz入射频率下的RCS算术均值,可以看出,频率较俯仰角响应特性形式单一,前向H-30°、后向T-30°、侧向S-30°、周向W-360°各角域上的RCS算术均值均单调降低,降低幅值各不相同,在前向H-30°角域上,由-21.292 7 dBsm降低至-34.267 3 dBsm,而后向T-30角域上,由-18.950 6 dBsm降低至-30.401 3 dBsm。参考图4多频RCS曲线,频率增加时,曲线在不同程度上向内压缩,尤其在散射波峰上,有效降低了散射强度,这一点对3个布局来说相似,RCS均值的降低在一定程度上提高了无人作战飞机在该角域上的隐身性能。
5.3 RCS算术均值变化规律
实际执行任务中,对无人机作战飞机隐身性能有重要影响的角域为前向和后向,因此,研究时,以前向H-30°、后向T-30°为参考,详细研究3种布局的算术均值变化规律。俯仰角为0°时,3种布局电磁模型的RCS算术均值频率响应曲线如图5所示,俯仰角响应曲线如图6所示。
散射曲线分布特点和不同角域的RCS幅值是无人作战飞机隐身性能的主要表现,也与布局分布特点、结构设计特点、部件设计思路等有较大关系。不同布局飞行器决定其散射特性,也对RCS算术均值有直接影响。从图5可以看出,入射电磁波频率增加时,3种布局的前向H-30°、后向T-30°角域的RCS算术均值呈振荡减小趋势,即频率增加时,隐身性能有一定提高。同时,频率响应曲线也表现出了异同点,首先,就3种布局来说,布局A算术均值最大,布局B稍大,布局C最小,布局A前向H-30°、后向T-30°角域RCS算术均值受波峰影响,提高了幅值,而布局B和C在前向H-30°、后向T-30°角域不存在散射波峰,相对RCS幅值较小,因此RCS算术均值较小,具有较高的隐身性能。其次,前向H-30° 和后向T-30°角域响应曲线表现特性各异,可以看出,对前向角域,3种布局频率响应曲线振荡较小,且频率相等时,RCS算术均值大小(前向隐身性能)依次为布局A、布局B、布局C,三者降低幅值有一定差异,布局A与B最大差值为9.359 4 dBsm(频率10 GHz),布局B与C最大差值为5.704 7 dBsm(频率3 GHz);而在后向T-30°角域,由于机身后端面的镜面散射较强,布局A的RCS算术均值在各频率上最高,且与布局B和布局C差异较大,布局B、C频率响应曲线较为接近,且布局B的RCS算术均值频率响应曲线较为平缓。最后,可以看出,布局C在前、后向角域上具有较好的隐身性能,布局B次之,而布局A最差;布局C前向H-30°角域RCS算术均值最低可达-34.308 7 dBsm,后向T-30°角域上最低为-30.401 3 dBsm,隐身性能优秀。
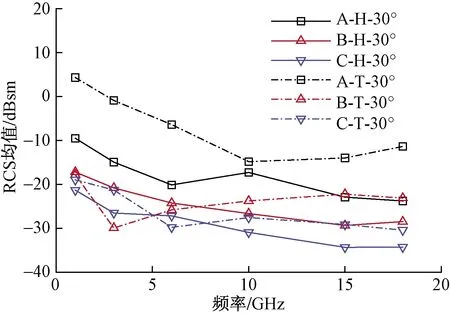
图5 RCS均值频率响应曲线Fig.5 Curves of RCS arithmetic mean value with different frequencies
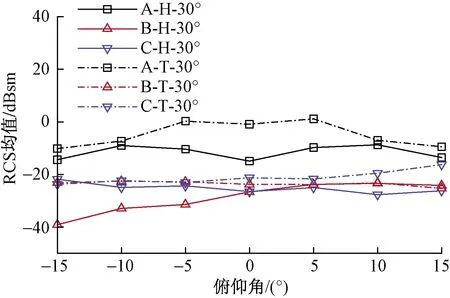
图6 入射电射电磁波频率为3 GHz RCS均值俯 仰角响应曲线Fig.6 Curves of RCS arithmetic mean value with different pitch angles when the incident electromagnetic wave is 3 GHz
从图6可以看出,俯仰角变化时,不同布局的前向、后向RCS算术均值响应曲线呈振荡变化趋势。首先,与多频相应曲线类似,受限于RCS散射曲线分布规律及散射机理,在前向、后向角域上,布局A的机翼前后缘、机身及后端面散射效果决定了前后向散射波峰的出现,而俯仰角变化时,这一散射效果并未发生明显减弱,使布局A具有最高的RCS算术均值,隐身性能最弱,布局B和布局C均值响应曲线较为接近。其次,俯仰角增加或减小时,在对应入射电磁波方向上,对布局A,前向RCS算术均值与机翼前缘、机身头部等投影面积相关,后向呈较小范围的振荡趋势,而在后向角域上,表现为中间高两端低的形式,主要是后端面镜面散射的效果;但对于布局B和C,机翼后掠且采用翼身融合的外形隐身技术,在其前向和后向角域上,俯仰角变化较小时,散射机理均未发生较大变化,且幅值变化较小,因此,其前向和后向角域上的RCS算术均值响应曲线变化较小。对布局B,俯仰角变大时,前向RCS算术均值逐渐增加,但幅值较小,这一效果是由于背部进气道遮挡影响所致;同时,可以看出,俯仰角在-15°~15°时,布局B、C的前、后向算术均值基本在-20 dBsm以下,二者均具有较好的俯仰角隐身性能,进一步说明翼身融合、进气道锯齿化、机翼前后缘后掠角设计等外形隐身技术的作用。
6 结论
从实际作战角度出发,基于现有不同三种不同气动布局的无人作战飞机,建立了电磁分析模型,计算了不同入射频率、俯仰角状态下的RCS曲线,并进行详细研究,得出如下结论。
(1)RCS散射曲线分布特性:布局与结构形式是构成散射特性分布的重要因素,传统布局A在前向和后向均有散射波峰,为机翼前缘、机身、进气道装置的综合效果,隐身性能较差,采用分段平行式前缘的飞翼布局B,前、后向均无散射波峰,同时机翼前、后缘、进气道等产生的波峰较窄,三角形飞翼布局C与B相似,前后向隐身性能较好,而不同的机翼前后缘后掠角、较复杂的机身和进气道结构等引起散射波峰宽度的增加。
(2)频率响应特性:频率增加时,三种布局散射曲线向内压缩,各角域RCS算术均值随着频率的增加而减小,隐身性能同时提高;布局A、B、C的前、后向角域上的隐身性能依次提高,布局C前向角域RCS算术均值最低可达-34.308 7 dBsm,后向角域为-30.401 3 dBsm,具有较高的隐身性能。
(3)俯仰角响应特性:俯仰角变化时,三种布局的RCS算术均值呈振荡变化趋势,同时,布局A的算术均值最大,布局B和C次之;俯角或仰角增大时,布局A的前向角域RCS算术均值减小,后向角域呈振荡趋势,布局B和C在小的俯仰角变化范围内,散射机理未发生明显变化,RCS算术均值振荡变化,但布局B的前向角域在俯角时由于进气道唇口遮挡等,其RCS算术均值较低,隐身性能较好。
