基于特征融合的随机森林飞机尾流识别
2021-11-20冷元飞潘卫军殷浩然罗玉明许亚星王靖开
冷元飞,潘卫军,殷浩然,罗玉明,许亚星,王靖开
(中国民用航空飞行学院空中交通管理学院,四川 广汉 618307)
尾流是飞机高速飞行产生升力的副产物。在密集繁忙的机场空域,前机的尾流将严重影响后机的飞行安全[1-2]。国际民航组织在上个世纪70 年代制定了尾流间隔标准,但随着机场交通流量持续增长,保守的尾流间隔限制了机场的容量。飞机离场和进场时,为了实现实时动态化间隔调整,尾流的探测和识别逐渐成为了关注的热点。目前,针对尾流的探测技术主要包括微波探测、声波探测和雷达探测等技术[3],其中多普勒激光雷达是尾流探测中最重要的工具之一。Hannon 等在1993 年研究了脉冲2 μm 相干激光雷达在飞机尾流探测的应用[4]。Dolfi-Bouteyre 等通过使用1.5 μm 光纤多普勒激光雷达对尾流进行远距离探测,其雷达探测距离可达到1.2 km[5]。Smalikho 等应用相干多普勒激光雷达测得的数据估算飞机尾流涡流参数[6]。近年来,随着人工智能的发展,机器学习因其良好的鲁棒性在雷达数据识别中得到广泛应用,因此通过结合激光雷达尾流探测技术,将机器学习算法应用于尾流识别成为了一种新的方法。本文以多普勒激光雷达采集的尾流数据作为依据,分别提取了尾流样本的径向速度和边缘轮廓特征,构建随机森林模型,以期实现对飞机尾流的识别。
1 尾流探测方法和实地数据采集
1.1 激光雷达原理
多普勒激光雷达(LIDAR)发射特定波长的激光波束扫描运动气流时,空气流体中的分子或气溶胶粒子将使激光产生向后的散射[7]。若此时气流中分子和溶胶粒子正以不同速度各向运动时,将使得雷达接受设备所捕获的散射信号产生多普勒展宽,且多普勒频移ΔfD与探测到的粒子和分子径向速度VR之间存在以下关系:

图1 展示了当飞机穿过目标空域时,在复杂的空气动力和飞机相互作用下,飞机会在其左右翼尖处产生湍流漩涡。这对涡旋将使得空气中的气溶胶粒子P(di,θj)产生向内旋转的运动。
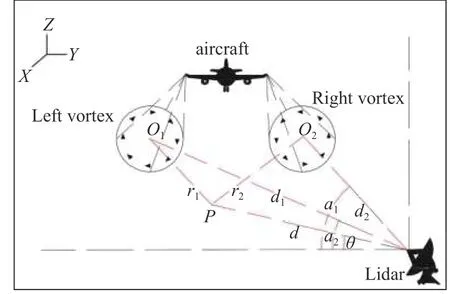
图1 激光雷达扫描飞机尾流,RHI 模式
当多普勒激光雷达对飞机经过的垂直平面进行机械扫描时,即可得到探测切面的尾流速度分布场Vr:

式中:[a,b]表示激光雷达距离探测范围;[m,n]表示激光雷达角度扫描范围;vr表示粒子在(di,θj)的径向速度。
1.2 实地采集
在本实验中,通过使用Wind3D 6 000 激光雷达设备在四川双流机场进行了飞机尾流实地探测。激光雷达按一定仰角周期往返扫描,获取目标空域风场信息。实地共收集到了3 530 份数据,其中包括A320、A330 等多种类型飞机产生的尾流样本。在探测过程种,当某一架飞机离场经过雷达扫描切面时,图2 可视化了尾流演化过程。其中伪彩图的蓝色颜色表示接近激光雷达方向的速度,红色为远离激光雷达方向的速度,颜色的深浅即为相对速度的值大小。

图2 可视化尾流演化过程
2 尾流特征提取
2.1 径向速度极差特征提取
径向速度风场中具备一对反向的正负速度对,是存在飞机尾涡的一个最简单和直接的特征[8]。为了体现飞机尾涡流场存在的正负速度的差异,速度极差能很好地描述这个特征。本文通过滑窗来扫描多普勒激光雷达采集得到的速度场,在不同径向上提取该窗口下径向速度最大值和最小值的差值D(di),图3 描述了扫描过程。
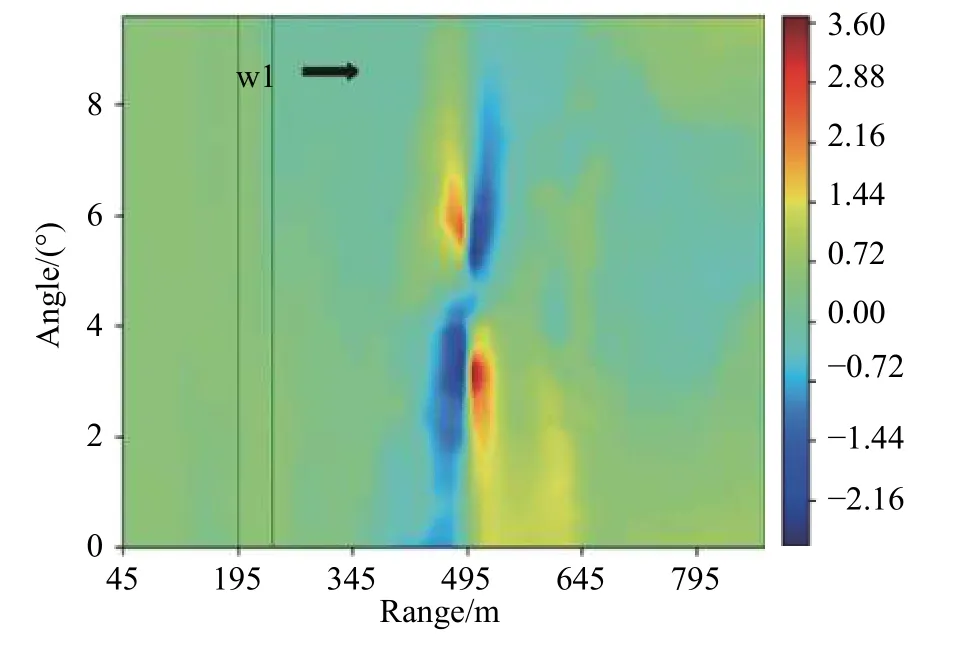
图3 速度极差特征提取
其速度极差的计算式可表达为

式中n表示激光雷达距离门的数量。
三、四级地的耕层质地中,轻壤和砂壤比例增加,中壤比例降低;障碍层存在少量的砾质层;土层厚度明显降低,近20%~30%的耕地土层厚度为30~60 cm;灌溉保证率有所降低,近一半耕地不能灌溉。该区域土地质量较好,但缺乏相应的灌溉设施,存在一定限制性。五、六级地中轻壤比例逐渐降低,砂壤比例进一步增加;存在明显的砾质层;绝大多数耕地的土层厚度小于60 cm;同时,不能灌溉的耕地面积进一步扩大。该区域障碍层明显,灌排设施较为薄弱,阻碍作物的生长发育。
2.2 轮廓边缘特征提取
图像轮廓和边缘特征主要针对物体对象的边界,形态学梯度是一种常用提取图像前景物体边缘轮廓的方法。形态学梯度使用图像的膨胀或者腐蚀与原图进行作差组合,来实现增强结构元素领域中像素的强度。本文首先将尾流样本转化为灰度图,然后使用形态学梯度对样本进行处理。图4 展示了处理过程和含有尾涡和不含尾涡的结果。

图4 轮廓边缘特征提取过程
图4 的处理结果表明形态学梯度能够很好地将雷达数据样本的尾涡提取出来,但是经过处理得到的特征图还需要一种特征描述子来表征。直方图作为一种基于统计特性的特征描述子,能够描述灰度图像中灰度的频率分布。为了减少表征的特征量,通过滑窗统计径向方向上的灰度累计值来描述灰度图像轮廓和边缘特征。图5 显示含有尾流样本和不含有尾流样本的灰度直方图结果。
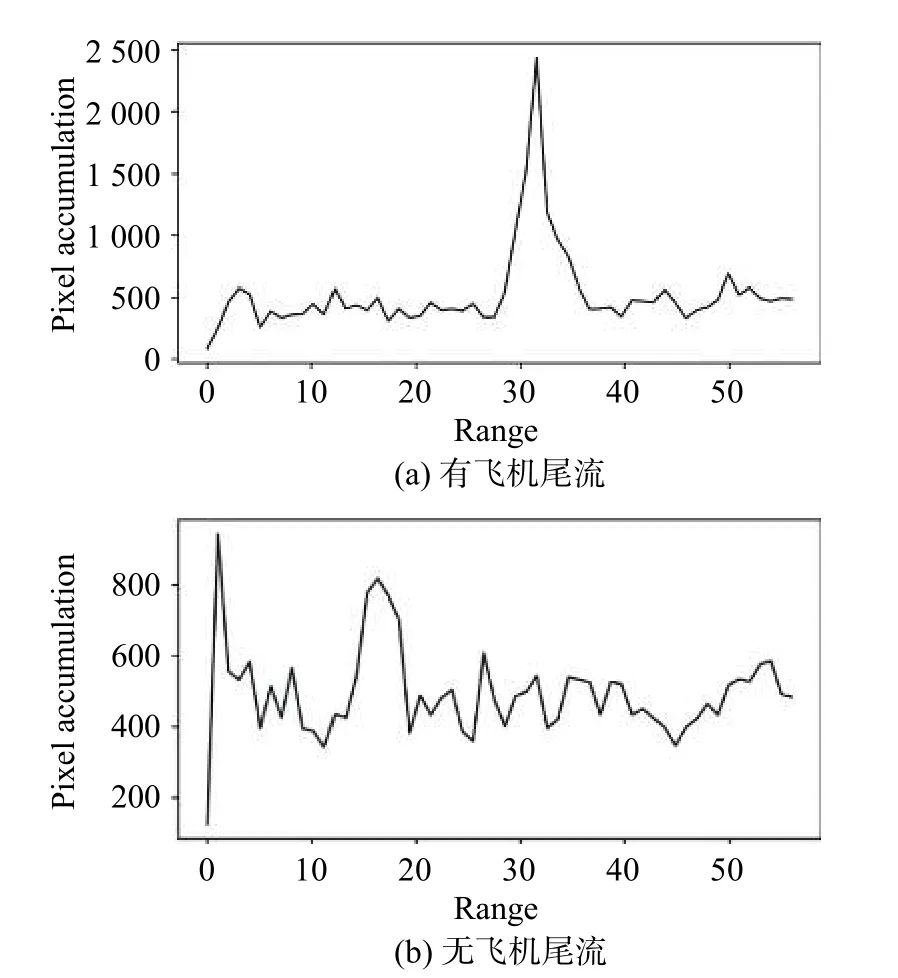
图5 灰度累计值直方图
对比两个样本的直方图统计得出,原始样本数据经过灰度映射和形态学处理后,在不同径向上灰度累计值的分布不同。其中有尾涡的样本经过处理后,灰度累计值在尾流所处径向上最大,其他部位较低。而不含尾涡的样本经过处理后,其灰度累计值在各个位置分布相对较平均,这种结果能直观体现图4 的两种图像差异。
3 随机森林算法
3.1 算法原理
随机森林(Random forest,RF)[9]是一种著名的集成学习算法,它是集成学习思想下的产物。其由多棵决策树整合而成,通过对样本有放回的随机部分抽样作为每颗树的学习样本,使得随机森林具有适合从较高维度的特征中进行学习的优点[10]。每棵树在训练时,其运算过程相对独立,可以采用并行化计算处理方式减少训练时间,加快预测速度,图6 展示了随机森林算法过程。
如图6 所示,针对分类问题,随机森林采用多数投票法。利用随机森林模型对测试集样本进行分类判别,其过程就是让森林中的每一棵决策树分别判断和分类,每颗树会得到一个决策结果,所有决策树的分类结果中分类最多的作为最终输出,输出判别式如式(4)所示。
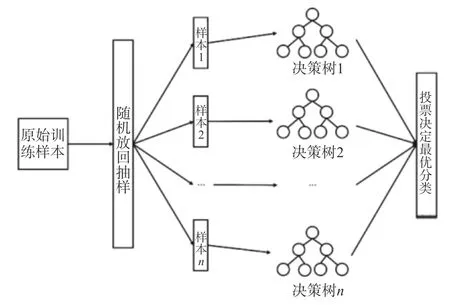
图6 随机森林算法

式中:argmaxY表示函数取得最大值时的参数值;H(x)表示随机森林的最终分类结果;hi(x)表示单一决策树模型分类结果。
3.2 随机森林的识别过程
本实验将在双流机场使用多普勒激光雷达采集的数据样本进行随机乱序,然后将其按6∶2∶2的比例分为训练集、验证集、测试集。特征提取包括径向速度特征提取和轮廓特征提取。径向速度特征提取是通过滑窗的方式提取激光雷达原始数据在不同径向上的速度极差,轮廓特征提取是将雷达数据样本映射为灰度图,然后对灰度图进行形态学梯度计算,同时也采用滑窗方式在不同径向上提取轮廓的灰度累计值,从而得到统计直方图。之后对两种特征进行融合,使用融合的后特征对随机森林模型进行训练。最后将已经训练好的模型在测试集上进行测试,得出测试结果。图7 展示了基于特征融合的随机森林飞机尾流识别流程图。

图7 基于随机森林模型的尾流识别流程
4 结果与分析
4.1 实验平台
本实验建立在Sklearn 框架上,使用Python 语言编程实现。实验工作站为Dell T7810 工作站,16g 内存,CPU 为12 核,3.4 G 主频。
4.2 实验结果
准确率(Accuracy)是评价分类模型性能的重要指标之一,并且精确率(Precision)、召回率(Recall)和综合评价指标(F1-score)在最终分类阶段也作为常用的指标。4 种模型评价指标公式如式(5)—(8)所示。
式中:TP(True positive)表示实际类别为正,预测类别也为正;FP(False positive)表示实际类别为负,模型预测类别为正;TN(False negative)表示实际类别为负,预测类别也为负;FN(False negative)表示实际类别为正,预测类别为负。
为了验证本文方法的有效性,分别将2 个单一特征和融合特征输入到随机森林分类模型中进行比较,其结果如表1 所示。
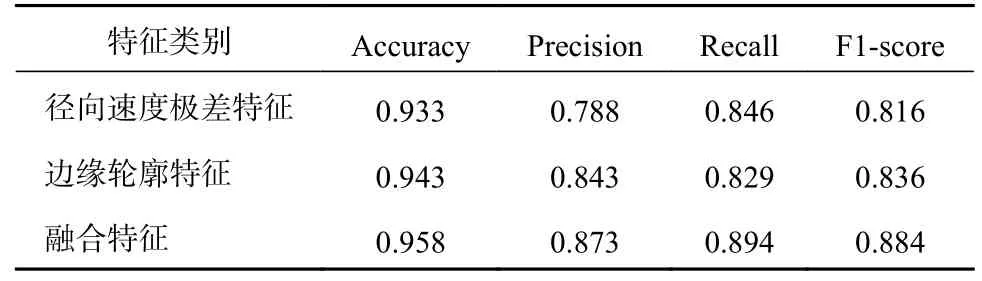
表1 不同特征下的识别结果
通过对表1 的实验结果分析,尾流识别中,根据轮廓边缘特征相较于径向速度极差特征准确度高,体现了原始数据经过灰度映射和形态学梯度去除了背景风场影响,能更好地对尾流特征进行提取。径向速度和轮廓边缘特征相结合识别的准确率为95.8%,比径向速度极差特征和边缘轮廓特征准确率分别高2.5、1.5 个百分点。该方法避免了单一特征的局限性,提高了识别准确率,证明了本文提出融合特征方法的可行性
4.3 不同分类模型结果对比
为了验证本文随机森林模型的有效性,基于本文提出的融合特征方法,将随机森林模型同单一的决策树模型进行对比,实验结果如表2 所示。
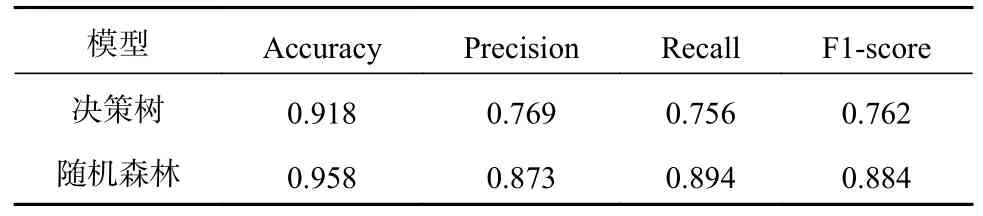
表2 不同模型下的分类结果
作为评估一个二值分类器的优劣,受试者工作特征曲线(Receiver operating characteristic curve,简称ROC 曲线)被广泛应用于机器学习域。其中ROC 曲线上每个点反映在一个阀值下,模型识别正确和识别错误的概率。AUC(Area under Curve)是ROC 曲线下的面积,其值介于0.1 和1 之间,可以直观地评价分类器的好坏,分类器AUC 值越大越好。图8 展示了随机森林和决策树在测试集上的ROC 曲线。
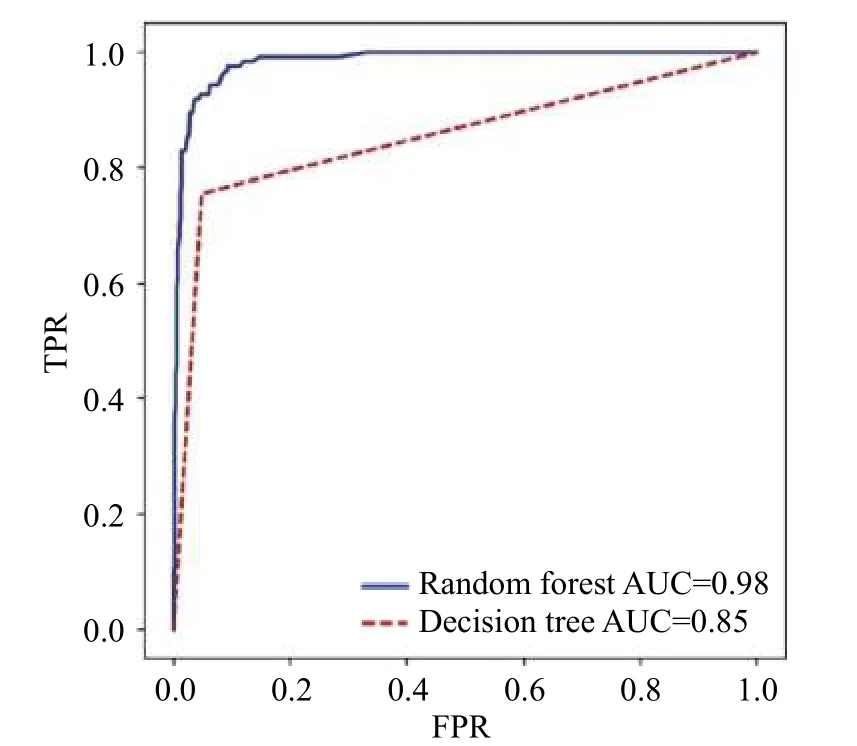
图8 随机森林和决策树的ROC 曲线
由表2 可以看出,针对尾流的识别问题,随机森林模型明显优于单一的决策树模型,随机森林模型在准确率和F1-score 上分别高出4 和12.2 个百分点,且在精确率、召回率上也有很明显的优势。除此之外,由图8 中随机森林模型和单一决策树模型的ROC 曲线和AUC 值相比较,也表明随机森林模型有更强的鲁棒性。
5 结论
本文以飞机尾流作为研究对象,利用随机森林分类模型,提出了径向速度极差和轮廓边缘融合特征的方法,对复杂背景风场下的尾涡进行识别,并根据准确率、精确率、召回率和综合评价指标进行判定。为了评价本文提出的方法的有效性,对各单一特征和融合特征的分类结果进行对比,将随机森林模型同决策树模型进行对照试验。试验结果表明,基于融合特征下随机森林模型的飞机尾涡识别准确率达到95.8%,比单一径向速度特征和边缘轮廓特征准确率高2.5、1.5 个百分点,比单一决策树的准确率和F1-score 高4、12.2 个百分点。该方法在未来将有助于推动飞机尾流间隔的智能化调整,提高机场运行效率。
