ACAS X 监视特性分析及防欺骗技术探讨
2021-11-20李洪伟李家蓬
冯 涛,李洪伟,李家蓬
(四川九洲空管科技有限责任公司,四川 绵阳 621000)
ACAS X 防撞系统兼容了SESAR 和NextGen的未来运行概念,其基于概率模型的特性可以提供未来飞机位置,在考虑系统安全操作目标的同时,实现了逻辑定制特殊程序或空域配置[1]。相比TCAS Ⅱ而言,ACAS X 在降低升级与维护成本的同时,可将碰撞风险降低约50%[2],升级更快速便捷,并且ACAS X 采用扩展混合监视技术,扩充了ADS-B 信息的使用,可以产生交通告警干扰;因此,它是一种必然取代TCAS Ⅱ的新型机载防撞系统[3]。ACAS X 的监视可靠性直接影响飞机的飞行安全,因此针对ACAS X 监视特性的欺骗[4]与防欺骗技术[5-6]的研究将持续拓展。
1 ACAS X 目标监视特性
1.1 ACAS X 扩展混合监视的工作模式
ACAS X 采用扩展混合监视的工作模式,扩展混合监视软件依据RTCA DO-185B、RTCA DO-260B 和RTCA DO-300A 标准,完成空中目标主动、混合和被动监视3 种模式监视处理[7]。
1) 主动监视模式:通过C 模式呼叫和S 模式点名询问,对C 模式目标和S 模式目标(包括具备ADS-B OUT 功能的S 模式应答机)进行监视;其中监视询问周期为1 s,S 模式精简询问周期为5 s。
2) 混合监视模式:对于具备ADS-B OUT 功能的S 模式应答机,采用被动侦听广播报文(格式选择为DF17)接收目标经纬度、高度信号的方式,结合本机相关信息完成目标监视;然后通过动态主动监视的方式进行目标确认,主动监视的监视周期在10~60 s 动态变化。
3) 被动监视模式:对于具备ADS-B OUT 功能的S 模式应答机,采用被动侦听广播报文(格式选择为DF17)接收目标经纬度、高度信号的方式,结合本机相关信息完成目标监视;被动监视模式中无需通过主动询问确认。
扩展混合监视是一种增强型被动+主动监视模式,这样的监视模式更加合理;为满足系统监视性能和安全性,对该模式的适用条件(接近时间、信号幅度、信号有效情况)进行限定,当满足条件时,采用全被动监视模式,进一步降低频谱占用;当不满足条件时,转化为主动监视模式或部分被动监视模式。扩展混合监视状态转换流程如图1 所示。
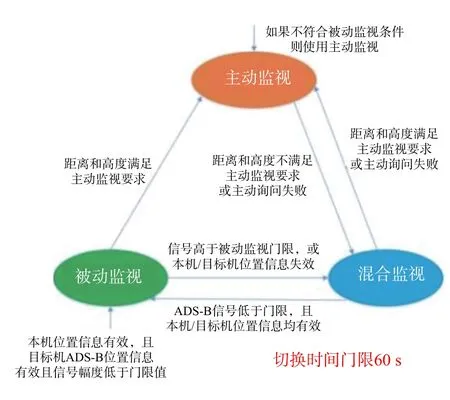
图1 扩展混合监视状态转换图
1.2 ACAS X 目标监视特性分析
ACAS X 包括监视跟踪模块(STM)与威胁决断模块(TRM),STM 可实现对目标飞机的空域态势感知与监视,并提供最优数据源给TRM 进行威胁评估与决断告警。ACAS X 对ADS-B 被动监视信息的应用更为友好与开放,STM 使用主动监视数据、ADS-B 数据和ADS-R 数据。STM 为每个数据源维护独立的航迹,这些航迹关联后与具体目标联系在一起,然后STM 选择1 个航迹数据源(主动、ADS-B 或ADS-R)供TRM 使用。
STM 为每条航迹标记信息,该信息允许TRM判断航迹是否可以用来产生RAs 和TAs 或者仅产生TAs。如果ADS-B 数据通过了一次STM 主动确认(通过主动的S 模式询问),它就被标记为有资格产生RA。一般地,一旦STM 对1 条ADS-B 航迹的主动确认失败,那么这条航迹存续期间内不再提供给TRM。
表1 指出传递到TRM 与显示模块的航迹类型和保护能力是主动监视类型、被动监视和STM 主动确认状态的函数,通过满足使用ADS-B 数据用于RA 保护所需的最低值来确定ADS-B 或ADSR 数据的质量(NIC≥6,NACp≥7,NACv=1,SIL=3,version=2)。由表1 可知,高质量的ADS-B 被动监视航迹一旦通过主动确认将优先传递到TRM 用于告警与显示。这里的主动确认,是指通过TCAS的S 模式主动询问获取目标监视信息(距离、高度、方位),并将这些信息与ADS-B 被动监视航迹进行相关,如果相关成功,则判定主动确认状态为“通过”,否则为“失败”。
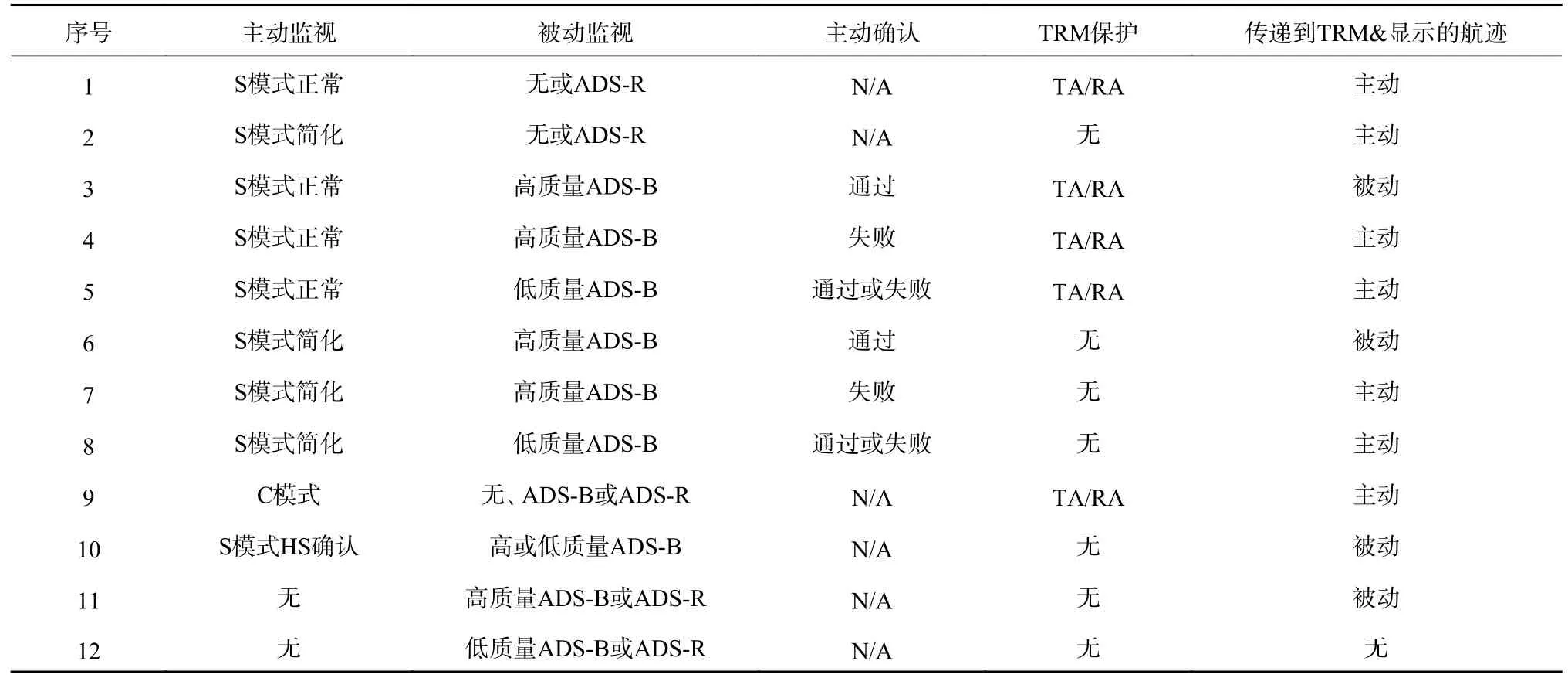
表1 监视目标输出表
相比TCAS Ⅱ,ACAS X 将更多地应用ADSB 被动监视[8-9],并设置AOTO 工作模式(ADS-B ONLY TA ONLY)。
2 ACAS X 监视特性缺陷
ACAS X 作为成熟设备,其基于二次监视雷达原理,采用定向询问和点航迹处理等技术,本身就有较强的抗抗干扰能力。但扩展混合监视和ADSB 信息的深度应用,带来了潜在的被欺骗干扰问题,可能会被干扰装置进行技术手段欺骗[10-13]。
1) ACAS X 通过“主动确认”目标距离、高度是否相关来判断ADS-B 目标是否真实存在的监视特性,并不能排除通过距离编程改变应答延迟时间来“改变”与目标的距离、高度信息的欺骗方式。
2) ACAS X 通过定向天线进行ADS-B 消息的接收得到真实信号的方位角信息的监视特性,不能排除通过计算出目标方位并使用定向天线发送特定角度的干扰信号的欺骗方式。
3) ACAS X 可以将目标信号的幅度信息与距离信息相关联,如果幅度信息与目标距离不匹配,则ACASX 可以通过软件算法滤除这类假目标的监视特性,并不能排除通过调整自身发射功率的方式“改变”与目标的距离的欺骗方式。
3 针对ACAS X 监视特性的欺骗方式分析
针对ACAS X 的监视特性,可以通过灵巧欺骗的方式对ACAS X 进行欺骗,这种欺骗方式的信号处理流程如图2 所示。
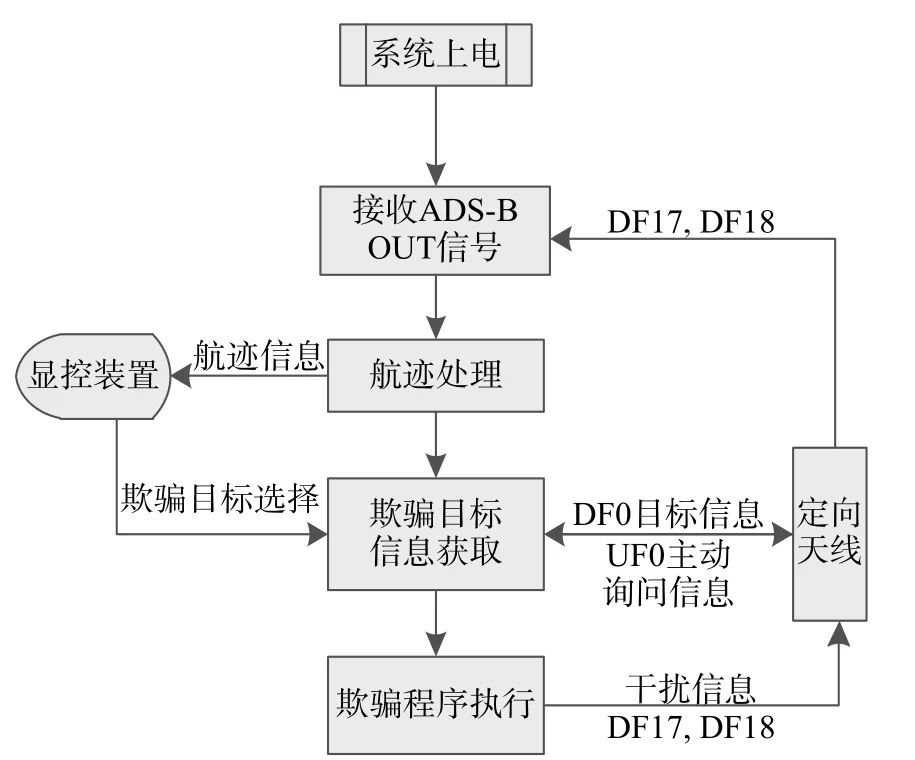
图2 灵巧欺骗信号处理流程
该欺骗手段可以通过如下处理流程实现对ACAS X 的欺骗:
1) 接收所有目标的ADS-B OUT 信号,解析ADS-B OUT 信号获取所有目标的24 Bit ICAO 地址、经纬度信息和高度信息,并利用经纬度信息和高度信息形成被动航迹。
2) 根据预先设置的24 Bit ICAO 地址和所有目标的24 Bit ICAO 地址从所有目标中确认被欺骗目标,并设定工作模式,其包括灵巧欺骗模式。
3) 在灵巧欺骗模式下,对被欺骗目标主动询问来获取被欺骗目标的主动航迹,并将主动航迹和被动航迹进行融合得到被欺骗目标的距离与方位(见图3)。
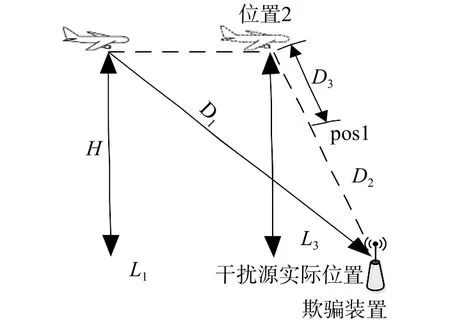
图3 干扰装置与被欺骗目标几何位置示意图
4) 根据被欺骗目标的距离与方位模拟一个运动模型,并且设置一条指向被欺骗目标的运动轨迹,所述运动轨迹由经纬度信息和高度信息组成。
5) 根据当前时刻运动模型与被欺骗目标的距离设置干扰信号的发射功率,将当前时刻被欺骗目标的方位设置为干扰信号的发送角度,将当前时刻运动模型的经纬度信息以及高度信息组成DF 报文,侦收被欺骗目标的UF0 格式的主动询问信号以确定干扰信号的应答时间延迟量,以及计算所得应答时间延迟量进行延迟后,以所述发送角度、发射功率发送携带DF 报文的干扰信号。
4 ACAS X 增强型防欺骗探讨
针对上述ACAS X 监视被欺骗的特性,需要对ADS-B 目标进行真实性验证,识别虚假欺骗信号,具体技术手段包括基于空域场景、基于信源头特征、基于数据一致性等,可采用单一或组合的方式。
4.1 基于空域场景的验证技术
加装ACAS X 的飞机主要包括民航运输机、货运机以及大型军用运输机、轰炸机等,其飞行的空域,包括民航专用空域、军事飞行空域以及其他空域。这些空域中往往有既定的飞行计划,或者有完善的地面监视设备[14],为目标真实性验证提供信息。
1) 民航运输机或货运机,通过载入飞行计划信息,将监视到仅ADS-B 航迹,特别是近距离可产生交通告警的航迹,与飞行计划信息作对比,验证航迹真实性。
2) 军用飞机除飞行计划外,还可采用数据链等地-空通信技术实时获取二次雷达地面站的航迹信息进行航迹真实性验证。
3) 军、民用飞机均可采用人机闭环的方式,采用电台、卫通等技术通过地面塔台进行真实性验证,排除虚假目标。
4) 未来随着星基ADS-B 技术的推广,可通过空-天通信方式,借助星基信息验证真实性。
4.2 基于几何相符与数据一致性的验证技术
几何相符依赖于数据一致性识别。数据一致性识别不同于信号的一致性识别之处,是在采集ADS-B 信号并解析ADS-B 数据的基础上,根据发布信号的目标数据内容了解该目标的飞行状态、运行趋势和未来动态,通过一段时间内积累的飞机数据与飞行器ADS-B 报告中的导航性能作相符性判断,进而评价数据一致性。本文限于篇幅,仅对基于几何相符的数据一致性识别简要说明,情况如下:
1) 意图获取:航空器意图报告(Target State,TS)/航迹变化(tragectory change,TC)报告获取。
2) 误差消除:航迹的卡尔曼滤波,针对不同运动模型,对其运动航迹滤波,得到更接近真实状态的飞行运动轨迹,方便与飞行意图进行比对分析。
3) 几何相符识别方式:在飞行器广播ADSB 消息时,会报告导航信息并计算获得相应的所需导航性能能力,即RNP(required navigation performance,所需导航性能)。RNP 类型决定了飞机航迹的最大偏移范围。在飞机飞行过程中,飞机需在RNP 限定的范围内飞行,若超过这个范围,其目标可能为虚假目标。
4.3 基于射频信号特征的验证技术
机载S 模式应答机进行ADS-B 信号广播时都具有其特有的射频信号特征,通过较高准确率识别对应S 模式地址的ADS-B 信号辐射源,可以有效地帮助区分真实目标与虚假目标,从而可以辅助提高ADS-B 抗干扰防欺骗能力。辐射源的个体特征,需满足可测性、稳定性、唯一性、完备性、普遍适应性等特点。ADS-B 信号由于采用的是国际民航组织规定的标准频段、标准格式,并且具有大量的空中真实航班作为稳定可靠的训练数据,完全满足要求。
4.4 基于欺骗信号的时间和空间特征
需要指出,航迹持续时间或运动的距离范围也是验证其真伪的重要特征,按照通用标准S 模式应答机应答延迟时间最长为128 μs,按照空间电磁波传播速度,这段时间间隔对应目标运动的距离范围是19.2 km,这一特点结合其他特征可以更有效地验证真伪。
5 仿真验证
本文篇幅所限,只选取第4 章所述的基于几何相符与数据一致性的验证技术进行仿真,来验证该技术对目标真实性验证的可行性。
5.1 飞机飞行轨迹、速度仿真
假设飞机在60 s 内,从初始位置(1 000 m,1 000 m,10 000 m)开始,以120、120、0 m/s 的初始速度,5、5、0 m/s2的加速度做匀加速直线运动。系统状态噪声标准差为5 m/s2,位置观测噪声标准差为120 m,速度观测噪声标准差为6 m/s,采样时间间隔为1 s。飞机的飞行轨迹仿真如图4 所示。独立进行1 500 次仿真实验,对飞机几何位置估计的均方根误差统计结果如图5 所示。

图4 飞机飞行轨迹图
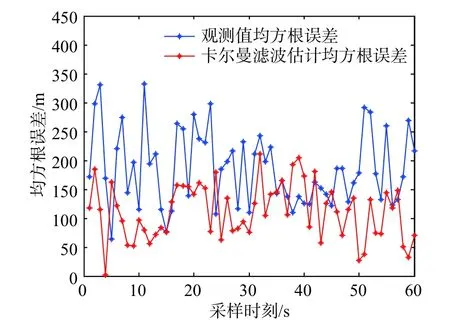
图5 飞机几何位置估计差
由图5 可知,卡尔曼滤波在一定程度上减小了飞机几何位置测量值的误差,可以得到更精确的飞机几何估计位置。
5.2 飞机几何位置一致性仿真验证
RNP 类型选取RNP-1,即RNP 要求飞机在计划航线周围1 海里的空域内飞行。假设飞机的飞行计划为:在60 s 内,从设飞机在60 s 内,从初始位置(1 000 m,1 000 m,10 000 m)开始,以100、100、0 m/s 的初始速度,以5、5、0 m/s2的加速度做匀加速直线运动。与此同时,干扰机从初始位置为(5 000 m,0 m,10 000 m)开始,以400、0、0 m/s 的速度匀速直线运动。
当干扰机产生并发射ADS-B 欺骗性干扰信号时,ADS-B 导航系统检测到监测飞机有两组完全不同的飞行航迹(航迹1、航迹2)观测值,此时通过卡尔曼滤波,飞机的飞行航迹如图6 所示。
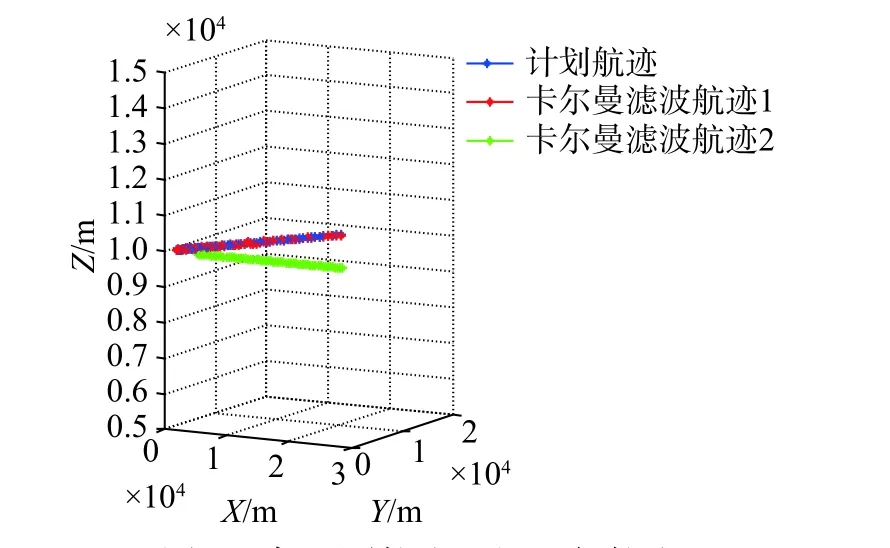
图6 各观测航迹飞机飞行航迹
因为ADS-B 导航系统可以根据飞机的ICAO地址获取飞机的飞行计划信息,因此可以通过计算获得航迹1 和航迹2 的几何位置相关函数,计算结果如图7 所示。
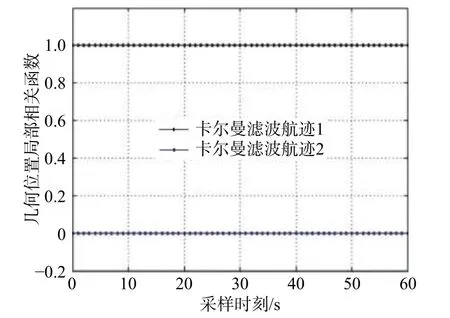
图7 各观测航迹的飞机几何位置局部相关函数
在60 s 的统计时间内,航迹1 的几何位置全局相关函数ρ1(N)=1,表明该航迹满足飞机几何位置一致性要求。航迹2 的几何位置全局相关函数ρ2(N)=0,表明该航迹不满足飞机几何位置一致性要求。
上述仿真表明,基于几何相符的一致性验证技术能够发现一段航路中飞行器几何轨迹与飞机导航性能不符合的目标,并隔离到具体的目标上(S 模式地址),进行虚假目标的滤除。
6 结束语
本文在新一代防撞系统ACAS X 上,分析其存在的技术缺陷并指出了在扩展混合监视特性下可能被干扰欺骗的方式和手段以及对应的优化措施,使得最终符合要求的ADS-B 航迹产生准确的交通告警。这为保障未来航空安全提供了一种有效的参考模型。
