量子细胞神经网络缩阶混沌函数投影同步
2021-11-17丛国涛王晓袁
王 森,丛国涛,王晓袁,杨 影
(大连东软信息学院智能与电子工程学院,辽宁 大连 116023)
1 引言
量子细胞自动机(Quantum Cellular Automata,QCA)是一种纳米级的新型电子器件,具有功耗低、集成度高和无引线集成等优点,将是新一代的电子元件之一[1-3]。而量子细胞神经网络(Quantum Cellular Neural Network,QCNN)[4]是基于细胞神经网络结构用QCA构造的局部耦合的神经网络。在QCNN中,每个细胞仅与邻近细胞利用库仑力进行耦合,可做到无线集成,进而易于大规模集成。另外,QCNN由于量子相互作用,动力学行为复杂,很容易实现不同阶数的混沌系统[5],将是未来保密通信和控制中超小混沌发生器的重要候选者[6-7]。
混沌控制和同步在通信和控制等领域具有广阔的发展前景。特别地,函数投影同步作为混沌同步领域一个非常重要的研究方向,已引起了人们的广泛关注与兴趣[8-13]。目前,在设计函数投影同步方案时,比例函数一般选择正弦函数、多项式函数[8-10]等简单函数,保密性能还有待进一步加强。前期提出了一种以混沌函数作为比例函数的投影同步方案[14],但该方案要求驱动系统与响应系统具有相同的阶数。而在实际应用中,不同的混沌系统,其阶数通常不同,研究不同阶数混沌系统间的函数投影同步更具有普遍性。因此,本文提出了一种缩阶混沌函数投影同步方案,并以六阶QCNN超混沌系统为响应系统,以Lorenz混沌系统作为比例函数实现了混沌函数的缩阶自同步和异结构同步。
2 缩阶混沌函数投影同步方案
混沌同步的驱动和响应系统一般可定义为

(1)

(2)
其中u(x,y)是控制器。假设混沌系统定义如下

(3)
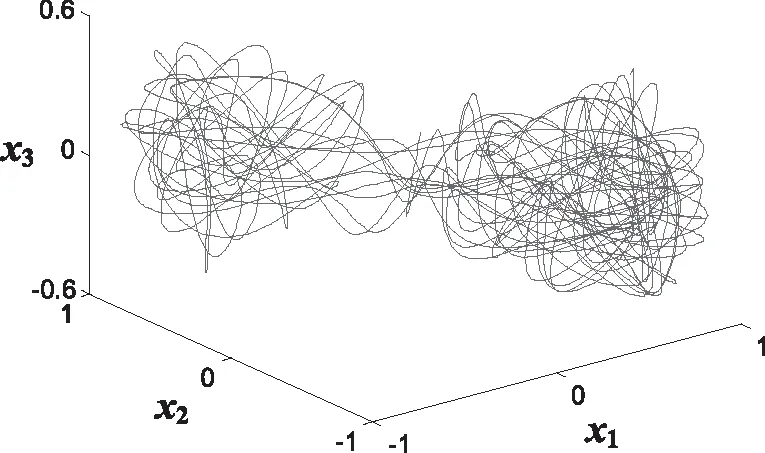
其中y∈Rn是n维状态变量,x,z,u∈Rm是m维状态变量,且有m 同步误差定义如下 (4) 定义:对于式(1)和(2)所示的驱动和响应系统,如果存在混沌系统(3)和控制器u(x,y),使得误差系统(4)趋于零,即 (5) 则称驱动和响应系统达到缩阶混沌函数投影同步。 定理1:对于给定的混沌系统(3)和任意的初始条件x(0),y(0),按下式设计控制器 (6) 证明 由(4)式可得 (7) 将(2)式代入(7)式,可得 (8) 将(6)式代入(8)式,可得 (9) 构建Lyapunov函数 (10) 则 (11) 根据Lyapunov稳定性理论可得,当t→∞时,ei(i=1,2,…m)→0,响应系统(2)以混沌系统(3)为比例函数实现了与驱动系统(1)的缩阶混沌函数投影同步。 下面将以六阶QCNN超混沌系统的缩阶自同步为例,阐述上述算法的有效性。假设混沌比例函数为Lorenz系统,可表述为 (12) 当系统参数α1=10,β1=30,γ1=8/3时,系统(12)出现混沌现象,其混沌吸引子如图1所示。 图1 Lorenz系统混沌吸引子 假设驱动系统为六阶QCNN超混沌系统[6],可表述为 (13) 其中x1、x2和x3分别表示细胞1,2和3的极化率,x4、x5和x6分别表示细胞1,2和3的量子相位。 当选取参数b1=b2=b3=0.28,w1=0.5,w2=0.3,w3=0.2时,系统(13)呈现超混沌状态,其在x1—x2—x3空间的状态轨迹如图2所示。 图2 QCNN系统在x1—x2—x3空间的状态轨迹 所谓自同步,是指响应系统是在驱动系统的基础上增加一个控制器u(x,y)。选择对系统(13)的前两个状态变量进行同步,混沌比例函数为Lorenz系统的前两个状态变量,则响应系统可表述为 (14) 其中y1、y2、y3、y4、y5、y6是响应系统(14)的状态变量,u1和u2为非线性控制器。 要使得响应系统(14)的前两个状态变量和驱动系统(13)的前两个状态变量以Lorenz混沌系统(12)的前两个状态变量为比例函数实现函数投影同步,则同步误差函数为 ei=yi-zixi,(i=1,2) (15) 根据定理1可得控制器如下 (16) 其中ki>0,i=1,2。选择Lyapunov函数为 (17) 将V求导,并将式(16)代入,可得 (18) 根据Lyapunov稳定性理论可得,响应系统(14)与驱动系统(13)在控制器(16)的作用下实现了缩阶混沌函数投影自同步。 采用MATLAB对缩阶自同步方案进一步进行仿真验证,其中驱动系统(13)初值取为x1(0)=0.11,x2(0)=0.11,x3(0)=0.11,x4(0)=0.1,x5(0)=0.1,x6(0)=0.1,响应系统(14)初值取为y1(0)=8,y2(0)=-10,y3(0)=6,y4(0)=0.8,y5(0)=0.4,y6(0)=0.2。另外,ki=1(i=1,2),积分方法为定步长的四阶Runge-Kutta法,步长为τ=0.001,仿真结果如图3和图4所示。由图3(a)和图3(b)可看出,当归一化时间逐渐增加时,yi→xizi,(i=1,2),响应系统(14)的前两个状态变量趋向于驱动系统(13) 对应的状态变量与Lorenz混沌系统状态变量的乘积。而由图3(c)可看出,对于未施加控制器的状态变量y3,已不能趋向于x3z3。由图4可见,误差函数ei(i=1,2)逐渐趋向于零,进一步说明该同步方案能实现缩阶混沌函数投影自同步。 图3 状态变量波形图 图4 误差函数ei (i=1,2)的波形图 假设驱动系统为Rössler混沌系统 (19) 其中参数α2=0.34,β2=0.34,γ2=4.5。 要实现响应系统对驱动系统(19)以Lorenz系统(12)为混沌比例函数,进行缩进函数投影同步,则响应系统为 (20) 其中u1、u2和u3为非线性控制器。而同步误差函数为 ei=yi-zixi,(i=1,2,3) (21) 根据定理1可得控制器如下 +α1x1(z2-z1)-k1e1 +x2(β1z1-z2-z1z3)-k2e2 +x3(z1z2-γ1z3)-k3e3 (22) 其中ki>0,i=1,2,3。选择Lyapunov函数为 (23) 对V求导,并将式(22)代入,可得 (24) 由Lyapunov稳定性理论可知,控制器(22)能实现异结构缩阶混沌函数投影同步。 数值仿真结果如图5和图6所示。其中初值取为x1(0)=0.5,x2(0)=0.1,x3(0)=0.3,y1(0)=-14,y2(0)=-16,y3(0)=9,y4(0)=0.1,y5(0)=0.2,y6(0)=0.3,其它参数设置与前述相同。由图5和图6可看出,当归一化时间t在4以后,yi→xizi,(i=1,2,3),误差函数ei(i=1,2,3)趋向于零,QCNN系统实现了异结构缩阶混沌函数投影同步。 图5 与Rössler系统同步的状态变量波形图 有必要指出的是,一般的函数投影同步方案中,响应系统状态变量的稳态波形只是混沌状态变量与正弦函数等简单函数的乘积。而由图3、5和式(15)、(21)可知,本方案得到的响应系统的稳态波形是两个混沌信号的乘积,其波形具有更强的随机性和不可预测性。因此,如果以该响应系统的波形作为载波信号进行保密通信,将具有更强的保密性能。 本文基于六阶QCNN超混沌系统,提出了一种新的投影同步方案。利用该方案能实现不同阶的响应系统以混沌信号为比例函数投影同步的驱动系统上去。 基于Lyapunov稳定性理论证明了该方案的正确性,并进一步通过MATLAB仿真验证了所提方案的有效性。由于该方案不要求驱动响应系统具有相同的阶数,在实际应用中将更加方便灵活。另外,该方案产生的响应系统波形具有更强的随机性和不可预测性,如将该方案应用于混沌保密通信,将使得通信方案具有更强的保密性。 有必要强调的是,QCNN系统具有丰富的混沌动力学行为,且易于大规模集成,将是低功率超小信号发射器的重要候选者。本文的研究结论将为QCNN应用于混沌保密通信提供重要的理论支撑。







3 仿真验证及分析

3.1 QCNN超混沌系统缩阶自同步




3.2 与Rössler系统异结构缩阶投影同步




4 结论