磁浮飞行风洞试验技术及应用需求分析
2021-11-13倪章松王邦毅
倪章松,张 军,*,符 澄,王邦毅,李 宇
(1. 成都流体动力创新中心,成都 610072;2. 中国空气动力研究与发展中心 设备设计与测试技术研究所,绵阳 621000)
0 引言
超高速轨道交通是未来轨道交通领域的重要发展方向。在国家“十四五”规划中指出,要大力发展轨道交通,推进CR450高速度等级中国标准动车组重大技术装备的研发。国家铁路局表示在接下来的《“十四五”铁路发展规划》中,要推动时速400 km级高速铁路关键技术、600 km级高速磁悬浮系统技术储备等重大科技研发,突破关键技术[1]。由中国中车股份有限公司承担研制、具有完全自主知识产权的时速600 km高速磁浮交通系统于2021年7月20日在中车青岛四方机车车辆股份有限公司下线,见图1。

图1 600 km/h高速磁浮下线[1]Fig. 1 A 600 km/h high-speed maglev train[1]
在高速轨道交通研究中,由于一些复杂流动对高速列车几何外形、运动状态、流动边界条件和外界扰动都异常敏感,流动模拟的相似参数要求很高,理论分析和数值模拟难度较大,其气动力及相关结构、控制等问题都必须依靠风洞试验来解决。真空管道超高速列车的研究正面临着一系列特殊环境下的复杂空气动力学问题,如超高速气动力精确预测及一体化设计、湍流减阻、边界层转捩、激波测量等,对风洞试验的流场动态特性、低扰动特性以及特种模拟能力提出了更高的要求[2-6],必须依靠新型磁浮飞行风洞技术和配套的试验技术加以解决[7-9]。
1 磁浮飞行风洞基本概念
1.1 原理
磁浮飞行风洞是利用真空管道列车概念结合超声速动模型试验技术提出的一种新概念风洞设备[10]。其原理是在一段封闭的直线长管道内安装磁浮驱动模型运动机构,结合采用电磁悬浮、驱动、控制、导向等特殊技术系统和环境维持及空气动力学测量等特种设备,在真空或非真空管道内开展风洞试验,构建接近真实条件的“体动风静”试验状态。相比传统风洞其试验环境更接近真实模型运行条件,能有效模拟高速列车及各类飞行器等设备在特种运动状态下的空气动力学现象。试验模型安装在测试平台上高速运动,通过改变模型运动机构的加速度及加速时间来实现运行马赫数的精确调节和控制,可模拟模型的快速加减速过程,得到速度急剧变化时的气动现象。磁浮风洞模型加速能力强,试验马赫数范围可涵盖极低速到超声速范围,通过调节管道内气体压力可实现运行密度的大范围调节,满足试验设备连续变马赫数、宽雷诺数范围、低噪声、低湍流度、高空深空、特殊气体介质等空气动力学及其交叉学科的试验研究需求[11-13]。
1.2 构成
磁浮飞行风洞由洞体机械系统、磁浮系统、测控系统、辅助系统及建筑工程等组成,其试验过程中磁浮系统驱动试验模型在等截面、直线、密闭管道内做加速、匀速及减速运动开展空气动力学动模型试验。
风洞洞体包括洞体管道(含开槽壁试验段及驻室、隔离段、隔离门等)、轨道钢结构基础、轨道及模型驱动承载平台。管道内气体介质通过隔离段及隔离门与外界隔离,实现对风洞测试环境气体介质与外界环境的隔绝。
磁浮系统用于搭载开展空气动力学试验模型,包含悬浮架平台、悬浮系统、牵引系统、制动系统、监测与通信系统等。磁悬浮技术利用磁力克服模型重力作用,实现对试验模型的无接触式支撑,有效避免了传统形式下机械的磨损与振动。比较成熟的磁悬浮技术包括电磁悬浮(EMS)与电动悬浮(EDS),可实现大重量下试验系统及模型在管道内的悬浮能力。牵引系统包含驱动电机系统及测速定位系统,通过超导空芯直线同步电机为悬浮平台提供牵引力以实现运行马赫数的控制。
测控系统控制风洞各种设备工作,主要包括风洞运行控制系统、风洞参数测量系统等。风洞控制系统包括压力调节系统、辅助控制系统、运行管理系统等,满足对信号检测系统、网络通讯系统的监测,实现风洞压力、总温、相对湿度等数据的实时或延时储存和传输。
辅助系统包括抽真空系统、驻室抽气系统、冷却系统、气体置换系统等,实现风洞中气体压力从1 kPa至100 kPa范围调节;消除由于管道长度有限,模型在有效空间内高速条件下管道端部的影响;替换管道内空气或者无腐蚀重气体等功能。
1.3 技术难点
磁浮飞行风洞采用磁浮驱动技术在真空管道内实现“体动风静”的动模型试验。国内大型磁浮风洞领域尚属空白,试验模型悬浮驱动技术、风洞空间动力设计技术、试验测量技术等尚不成熟。
磁浮驱动技术方面,磁浮飞行风洞采用的超导直流同步电机需具有超大功率、大推力、短时大电流过载等特点,电机制造与驱动、超导励磁线圈等方面具有一定挑战;空气动力设计技术方面,磁浮飞行风洞存在消除扰动波和激波干扰及传播、抑制“活塞效应”、控制噪声传播及反射等关键问题,是风洞设计需要攻关的技术难点;试验测量技术方面,磁浮飞行风洞存在测试时间窗口期短、试验过程中模型处于高速运动的状态,传统的稳态测量手段以及固定式测量方法使用存在一定困难。
2 国内外研究现状及发展趋势
相对于传统风洞试验采用的“体静风动”运行方式[14-15],“体动风静”的动模型试验技术需要驱动模型在低阻力滑轨上运动,从而开展相关空气动力学试验。为了满足先进轨道交通以及飞行器的高速度和高加速度试验需求,电磁弹射、磁悬浮驱动、橡筋弹射和压缩空气炮发射等关键推进技术不断成熟,同时动模型试验技术也在持续发展。当前比较成熟的动模型试验设备主要包括火箭橇和列车动模型设备。
2.1 火箭橇技术研究现状
火箭橇试验将试验模型固定于火箭橇试验滑轨上,通过火箭推进滑车及试验部件实现高速气流环境、高加(减)速度作用和一些特殊环境的综合性试验。主要用于航空、航天及高科技领域的科学试验研究,能够实现精确制导、弹射救生、航空生理、高过载、雨蚀、碰撞、穿甲、爆炸冲击等多种试验任务[16]。
火箭撬试验技术在第二次世界大战期间被提出,1945年,美国爱德堡空军基地首先建成一段670 m长的滑轨。20世纪,美国霍洛曼空军基地建成了世界上最长的火箭撬滑轨,全长15.48 km,最大马赫数可达8.5,如图2所示。近年来,美国在霍洛曼空军基地开始了火箭橇的“超导悬浮+火箭推进”新技术研究工作。在600 m长的轨道上,实现了马赫数1.2的试验速度[17-21]。
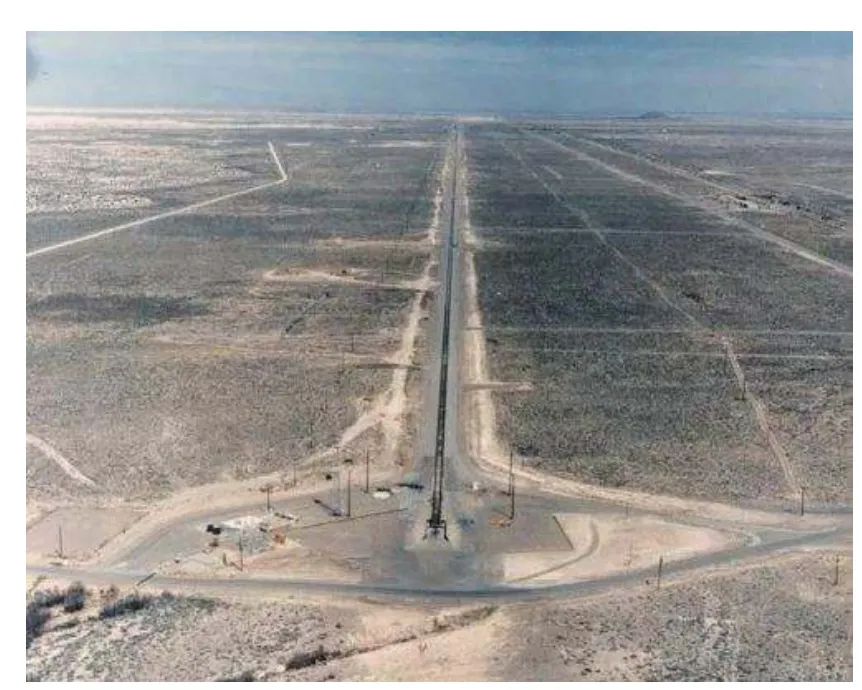
图2 美国霍洛曼空军基地火箭橇滑轨[19]Fig. 2 The rocket sled at Holloman Air Force Base [19]
1987年,我国建成了国内第一条、也是亚洲唯一的火箭橇滑轨[22]。1997年,我国历时十年建成了全长3132 m,间距1.435 m的高精度火箭橇滑轨。该滑轨在承载最大重量4 t时的最大设计马赫数为1.2。21世纪初,我国对上述火箭橇进行了扩建,长度达6.2 km,最高马赫数可达2.8[23-25]。
火箭橇试验是风洞试验的重要补充,在推进能力和试验马赫数上取得了很大的技术提升,但火箭橇试验也存在一些瓶颈问题。例如滑车与钢轨机械接触,滑车高速运行时,车轨之间的振动冲击达100g甚至更高,不仅影响测试信号的可信度,还容易对钢轨造成永久性的破坏,并存在一定的安全隐患。此外,由于试验是在地面进行,火箭尾气的排放需求不允许将试验轨道封闭起来,因此大气环境无法像风洞一样进行调控,大大降低了试验的相似度;另外,采用火箭速度曲线不能任意调控,单次试验成本较高,试验准备周期长,严重影响试验效率。
2.2 常规动模型技术研究现状
常规动模型试验技术弹射方式主要有橡筋弹射式和压缩空气炮发射式。二者的动力源不同,但原理相似,运动过程分为三个阶段:在橡筋弹力或压缩空气作用下的加速段、无动力惯性运动段(模拟试验区)、制动减速段。
英国伯明翰大学建成的研究型动模型装置采用橡筋弹射实现模型加速。在试验段附近设置风扇,用于模拟侧风对车辆的影响以及风对车辆滑流的影响。该试验平台可以实现列车通过时的压力测量、滑流试验、侧风试验、隧道试验等研究[26-27]。日本Kobayasi物理研究所的研究人员建立了小型高速列车压力波测量装置,采用压缩空气炮发射实现模型加速。发射系统由气罐和加速管组成,压缩空气储存在与加速管相连的储气罐中。列车模型放置在加速管内,从储气罐排出的压缩空气推动列车模型。列车模型从加速管中弹出后,在金属轨道上通过试验段。然后进入制动管,制动管利用列车模型自身压缩的空气逐渐使列车模型停止[28]。德国宇航中心采用融合古罗马炮弩和航空母舰弹射器原理的液压驱动弹射装置对模型进行加速。如图3所示,该装置不需要在模型车上安装对空气动力学有干扰的附件,因此可以进行模型底部气流地面效应的模拟。为了研究侧风情况下的车辆稳定性,优化了侧风试验装置(SWG),分析侧风对移动车空气动力特性的影响,同时还可以测量轨道附近物体上的空气动力学诱导载荷。该平台可以实现静态和瞬态列车空气动力学研究,如列车进入隧道时的压力波等空气动力学效应[29]。韩国建筑技术研究院的研究人员建立了电动机带传动弹射的小型列车动模型试验平台。模型车前后连接电缆,在导轨上前后移动,速度由装有电力逆变器的驱动电机控制。列车以1 m/s2加速度加速到3 m/s后恒定速度运行,随后以−1 m/s2的制动加速度停止。

图3 德国宇航中心TSG平台隧道试验[30]Fig. 3 TSG platform at the German Aerospace Center[30]
国外主要单位所具备的动模型风洞及试验平台的性能和参数总结如表1所示。
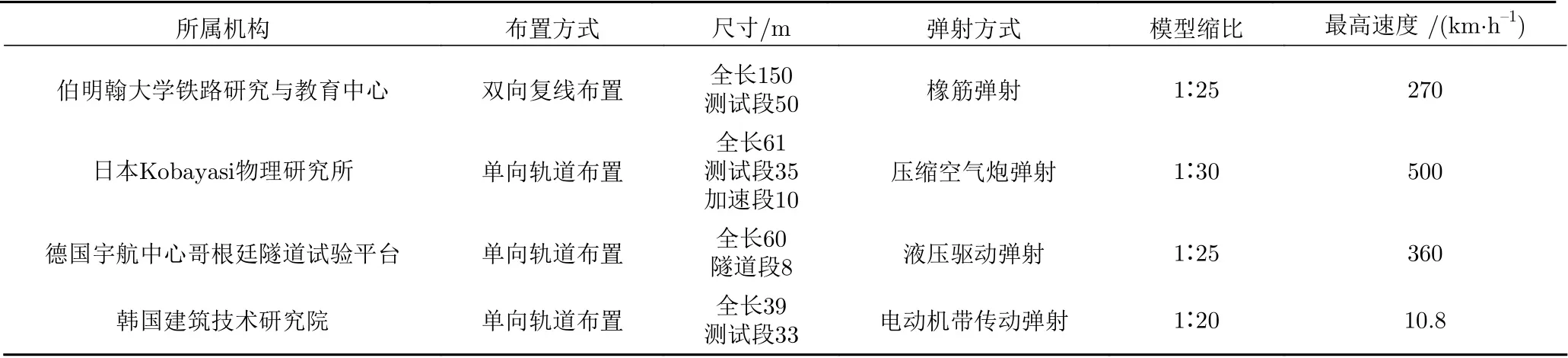
表1 国外部分引导性动模型风洞及试验平台参数Table 1 Parameters of foreign moving-model wind tunnels
国内开展列车动模型试验技术研究和测试平台建设的单位主要集中在中南大学轨道交通安全重点实验室、中国科学院先进轨道交通力学研究中心和西南交通大学试验中心等单位,以原理性、引导性设备为主。
西南交通大学试验中心建立的列车动模型试验装置由以压缩空气为动力的空气炮、模型列车、模型隧道、电控系统及列车模型回收系统组成。该套装置的优点是成本低、速度高;缺点是模型缩比大、雷诺数低、测试精度不高、模型列车上无法安装测试仪器等,不能反映列车真实受到的空气动力和瞬间压力冲击波[31]。中国科学院力学研究所提出了气动活塞牵引的列车动模型加速方法,如图4所示[32]。活塞置于加速气缸内,汽缸为一端开口另一端封闭的钢管,封闭端开一小孔,使活塞上的杆件能够与汽缸外的动滑轮组连接,动滑轮组再通过钢丝绳与轨道上的动模型连接,采用牵引的方式实现对模型车的加速。

图4 气动活塞牵引加速方法[32]Fig. 4 An accelerator using air piston[32]
中南大学轨道交通安全重点实验室建立了“列车气动性能模拟动模型试验装置”。如图5所示,试验线全长164 m,分为三段:发射段、试验段和减速段。在试验段上可安装各类隧道模型,用于列车交会和过隧道试验。在该测试平台上可模拟两交会列车、列车与地面、列车与周围环境之间的相对运动,再现高速列车交会、过隧道等空气三维非定常可压缩流动过程,获得具有相对运动的列车空气动力特性[33-35]。

图5 中南大学列车动模型试验装置[33]Fig. 5 Train-model test device at Central South University[33]
国内主要单位所具备的动模型风洞及试验平台的性能和参数总结如表2所示。

表2 国内部分引导性动模型风洞及试验平台参数Table 2 Parameters of domestic moving-model wind tunnels
动模型试验技术采用多种推进方式将试验模型由静止加速到测试工况,模型发射瞬间加速度达到最大值,随后加速度明显下降,导致试验模型后期加速能力不足,且模型出口试验速度难以精确控制。同时传统推进方式诱发的噪声明显,影响设备效能的发挥及试验精度。由于传统试验模型运载及推进方式存在一定限制,同时国内列车动模型试验台试验长度较小,模型缩比较大,一般用于开展基础研究和原理试验,难以开展工程级实车模型试验。
2.3 磁浮动模型技术研究现状
磁悬浮驱动由于载重量大、悬浮间隙大、摩擦能耗低,在动模型试验方面具有良好的应用前景。
欧美等发达国家一直没有停止对磁浮驱动技术的探索,尤其在超高速轨道交通和航空航天地面测试设备等领域,磁浮技术得到了初步的应用并取得了较好的使用效果,为我国发展磁浮飞行风洞提供了有益的借鉴。为了提高风洞对雷诺数的模拟能力,美国NASA经过论证提出了高升力飞行风洞(HiLiFT)的概念,如图6所示。
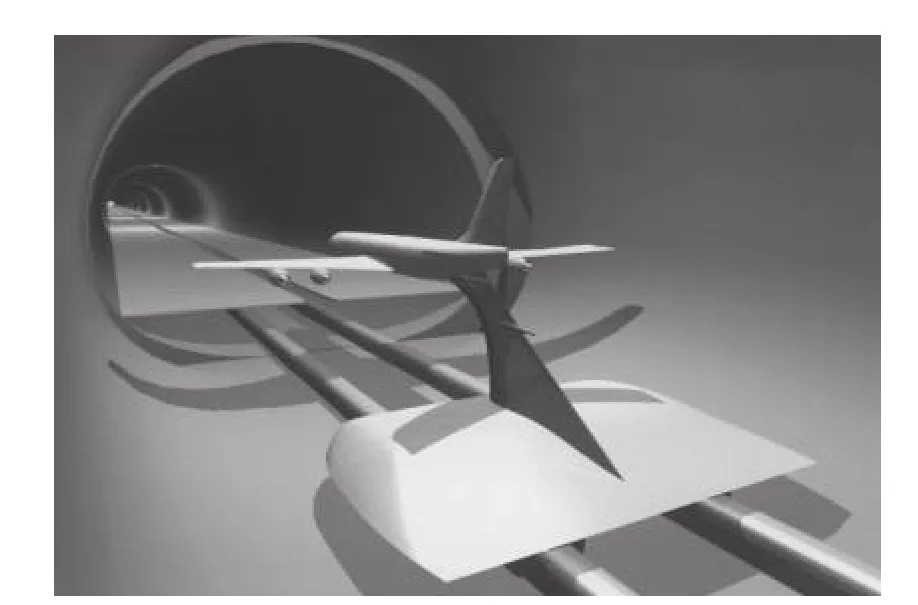
图6 美国HiLiFT高升力飞行风洞概念图[36]Fig. 6 A conceptual sketch of HiLiFT [36]
HiLiFT是利用磁悬浮推进技术推动试验模型在含有静止气体介质(空气或氮气)的管道中运动,采用气体装置控制设备实现介质的温控和增压,满足全尺寸飞机低速高雷诺数试验的要求[36]。但由于当时磁浮技术发展水平的限制和建造成本等原因,该风洞并未实际建设,而基于电磁推进和悬浮技术推动动模型的试验技术却始终在发展之中。
2013年,美国特斯拉公司的马斯克提出了时速1200 km的超级高铁(Hyperloop)设想,这种方案选用感应板式电动悬浮结合真空管道的模式。随后美国便成立了三家超级高铁公司开展研发,其中Hyperloop One公司2016年在拉斯维加斯北部的沙漠中利用测试轨道测试了超级高铁的推进系统(如图7所示),测试车辆的推力加速度为2.5g,重量约680 kg,最高时速为644 km[37]。

图7 Hyperloop全尺寸真空管道[37]Fig. 7 A full-size vacuum pipe of Hyperloop[37]
国内磁浮驱动技术虽然起步晚,但近年来在中低速磁浮技术领域已经取得了显著的成果。我国在轨道交通领域已建成了多条中低速磁悬浮列车线路,并建立了一些原理性的磁浮驱动动模型试验设备和测试平台。国防科技大学从20世纪80年代便在国内率先开展了磁浮技术研究,攻克了中低速磁悬浮控制技术并解决了工程化应用问题,并于2018年成功试验了新一代磁浮工程样车,时速达到160 km以上。北京航空航天大学提出了一种磁悬浮助推航天发射系统的概念,设计将单级入轨的运载器在较短的时间(~10 s)内加速到较高的起飞速度(~0.7Ma)[38-39]。
西南交通大学于2014年研制出如图8所示的真空管高温超导磁悬浮环形试验平台,建成了侧挂式高温超导磁悬浮真空管道系统模型,轨道全长20.4 m,管道直径6.5 m,模型车载重3.5 kg,稳定运行速度102 km/h[40-42]。中车青岛四方股份公司于2019年下线了时速600 km的高速磁浮试验样车。该样车于2020年在上海同济大学的磁浮试验线上开展了系统联合调试,目前试验运行速度达到80 km/h。
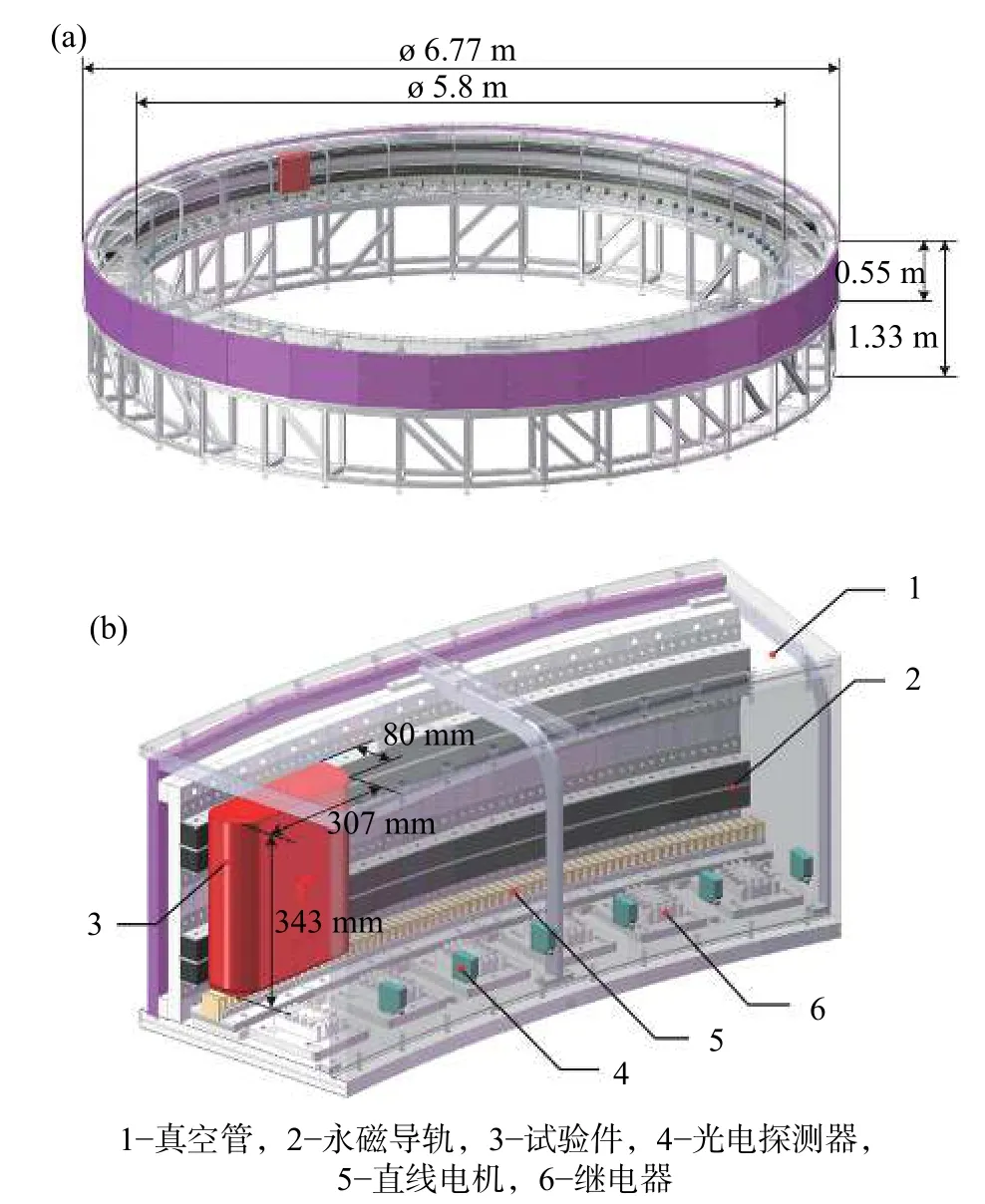
图8 高温超导磁悬浮试验平台[41]Fig. 8 A high temperature superconducting maglev test platform [41]
国内在动模型风洞及磁悬浮驱动系统方面已经开展了部分研究,但磁悬浮及真空超导技术在动模型风洞中的应用以及高速磁浮技术的电机驱动、速度控制、管道消音等关键技术仍有待于进一步深化研究,提高工程实用性。目前,我国尚缺少成熟的大型磁悬浮飞行地面试验和测试平台,现有的磁悬浮驱动动模型试验设备的尺寸、最高速度、试验功能难以满足高速列车及空天飞行器大型化、高速化、精细化的试验需求。
2.4 发展趋势分析
未来航空航天飞行器、先进轨道交通装备高速化、大型化、复杂化的技术特征,对高品质大型风洞提出了迫切需求,需要风洞具备更好的流场品质、更低的气流噪声、更宽的马赫数/雷诺数范围、更强的试验能力、更高的运行效率及更低的运行成本等。因此,需要在风洞运行原理、试验原理上发展新的概念,实现风洞性能和试验能力的突破。
磁浮驱动试验平台集合了传统风洞和动模型试验技术的优点,可以实现马赫数连续可变,雷诺数可调节,具备低噪声和低湍流度模拟能力,在超高速轨道交通及航空航天领域的特殊空气动力地面试验研究中具有独特试验能力优势,具备广泛应用前景。
3 试验技术分析
磁浮飞行风洞采用磁浮驱动技术使模型在真空或非真空管道内高速运动,模拟试验设备真实运行环境,有效弥补传统风洞试验和现有动模型技术的不足,是未来开展高速超高速设备空气动力学特性研究的理想平台。但其试验技术尚不成熟,亟需继承并发展现有风洞及动模型试验的测试技术、开展相关试验研究。
3.1 气动力精确测量
风洞天平是开展风洞气动力试验所必须的基本试验测量设备[43]。传统测力天平中应变式、压电式天平由于其响应时间快、载荷范围宽和模型适应能力较强等特点,在风洞气动力试验中应用广泛[44]。根据天平与测试模型的相对位置关系,天平可分为外式天平和内式天平。外式天平是把模型载荷传递到模型外再进行测量;而内式天平装在模型内部,对模型载荷直接测量[45-47]。由于磁浮飞行风洞气流静止而模型运动,采用外式天平会有较大难度,因此拟采用内式天平来测量模型的载荷。测量时,测量结果实时保存在存储单元中,试验结束后再导入计算机进行分析。
常用的内式天平采用电阻应变片测量天平受力梁变形进而测量模型受力情况。电阻应变片存在严重的温度效应问题,直接影响到试验数据的准确性和可靠性。同时,电磁场也会对电阻应变天平的输出信号产生干扰,因此电阻测力天平在磁浮飞行风洞中应用存在困难。光纤传感器通过模型受力发生的光学性质改变,来测量模型受力情况(如F-P应变计,FBG应变计等)。
基于光纤珐珀(F-P)应变传感器其核心结构由两个反射面组成的F-P反射腔,两块相互平行的反射面内表面的光学端面组成,之间的距离受应力作用而变化,如图9所示[48]。
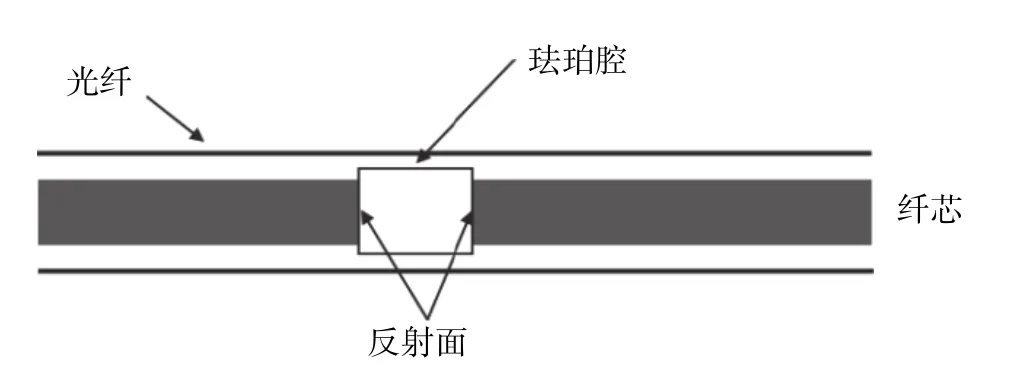
图9 F-P光纤应变计原理图[48]Fig. 9 A sketch of the F-P optical fiber strain gauge[48]
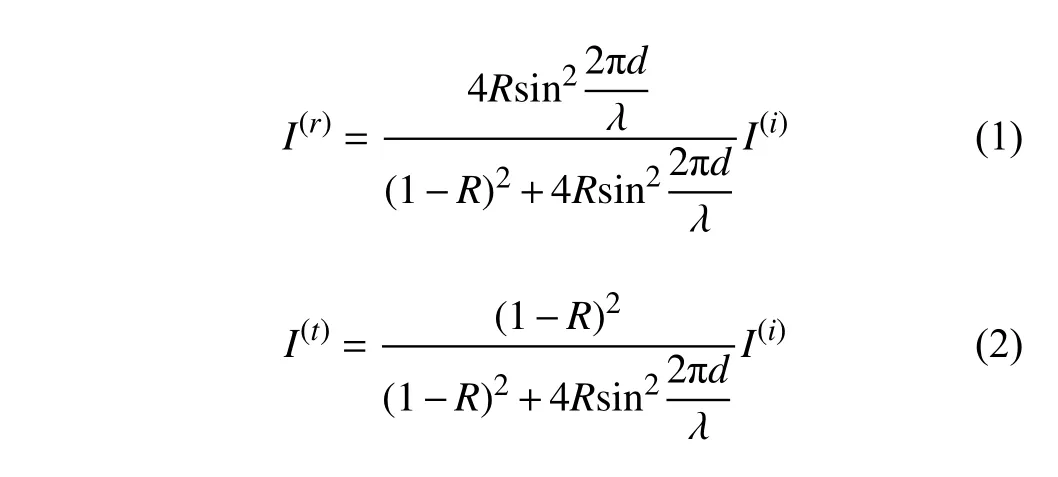
光在F-P腔内传播时,在两个端面上发生多次的反射、透射,形成多光束干涉现象,如图10所示[49]。将所有反射光和透射光振幅叠加。反射光和透射光强度与F-P腔长度、端面反射率等装置的固有性质相关。透射光谱随着F-P腔长变化而变化。应变计所受应变通过F-P腔长度发生变化引起的检测峰值点波长变化计算:
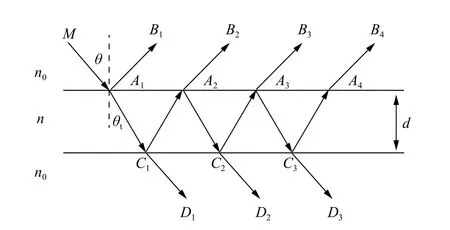
图10 光束干涉现象[49]Fig. 10 A sketch of the optical fiber interference phenomenon[49]
光纤应变计其具有灵敏度高、响应快、可靠性好、抗电磁干扰、耐腐蚀、能在高温环境中正常工作等优点。采用光纤应变设计的光纤天平(见图11)能解决传统电阻应变天平温漂大、抗干扰能力差、高温不稳定等缺点,能适应磁浮驱动飞行风洞中气动力测量[50-52]。

图11 基于F-P应变计的光纤天平[49]Fig. 11 An optical fiber balance based on F-P strain gauge[49]
3.2 湍流减阻测量
湍流减阻测量主要通过流动显示技术、模型表面摩擦力测量技术等,研究湍流特征与减阻效果的联系,开展湍流减阻原理试验分析,支撑湍流减阻技术的进一步应用与发展。湍流减阻测量试验流动显示技术主要包含粒子图像测速(PIV)、光子多普勒测试(PDV)、激光多普勒速度(LDV)。模型表面摩擦力测量技术主要包括热线法、油膜干涉技术、基于微机电系统(MEMS)剪应力测量。
3.2.1 流场显示技术
PIV测量技术是一种高效的非接触式流场测量技术,其测量原理如图12所示。在常规风洞试验过程中,拍摄流畅区域粒子分布情况,来进行水平和纵向截面的测量。通过对测量剖面的图片进行处理,绘制速度矢量图和流线图[53-55]。磁浮飞行风洞中,由于模型是运动着的,失踪粒子的播撒及照片的连续拍摄较为困难,想要得到固定剖面的流场图,可考虑在风洞管路沿程布置若干高速摄像站位及观察窗来进行拍摄,激光器如何保证能覆盖整个所测截面也需要进一步研究。
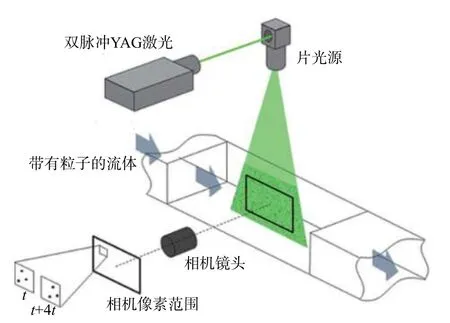
图12 PIV测量原理图[54]Fig. 12 A sketch of the PIV measurement[54]
磁浮风洞具有从亚声速到高超声速模型试验能力,超声速复杂流动PIV测试对光学部件、示踪粒子跟随性、示踪粒子布撒技术提出特殊要求。随着跨帧CCD相机和双脉冲激光器可获得亚微秒的时间间隔, PIV技术可以捕捉记录1000 m/s量级流动速度的互相关图像,逐渐应用于超声速流动甚至高超声速流动,但不可压缩和连续流动粒子的基本运动关系的线性关系在高速流动中不再适用。需要进一步提升粒子跟随性、提高激光器能量以增加信噪比,减小光学部件的跨帧时间、增加其空间分辨率。
3.2.2 表面摩擦力测量技术
MEMS壁面剪应力传感器具有时间灵敏度高、尺寸小、能较长时间开展检查的特点。主要有浮动单元式、热传递式、流动阻塞式、基于超声波和光学及其他MEMS传感器。其中,热膜传感器体型小、应用广、发展快,其主要基于对流换热的原理,电流加热贴附壁面的MEMS传感器热薄膜敏感元件,热能在不同流动情况(壁面剪应力)下通过热对流的形式转移到流场中,引起热敏电阻阻值的变化,如图13。

图13 MEMS传感器[56]Fig. 13 A MEMS sensor[56]
通过测量热敏电阻两端的电压变化,实现壁面剪应力的测量,如式(3)所示:
其中,E0是流体速度为0或无壁面剪应力输入时的电压值,E是有壁面剪应力作用在传感器上时的电压值,A、B、n是标定系数。
在磁浮飞行风洞中,能够开展湍流减阻试验的非稳态研究,MEMS传感器具有体积小、灵敏度高的特点,能够很好地应用于磁浮飞行风洞试验中,从而进行高速条件下湍流减阻试验模型表面剪切力的测量。
3.3 边界层测量
磁浮列车、高超速飞机、航天宇航器等设备运行过程中处于高速、低压力环境。其边界层流动与设备气动、传热问题息息相关,是设备应用与发展的关键问题。风洞中边界层测量需要通过一定手段准确测量转捩点的位置及边界层内温度,测量技术主要有基于流动显示、壁面湍流测量、壁面剪切应力测量、脉动压力测量及气动热测量等。
3.3.1 流动显示
流动显示主要包括烟流法、油膜法和丝线法。烟流法流动显示技术分为单管烟流法和排管烟流法,基本原理是采用烟流发生器产生单股或者多股烟流作用于模型表面从而显示流场状态[57]。磁浮飞行风洞中由于模型是运动的,烟流发生器需要安装在模型内部,烟流的出口开在模型表面。
油膜法是通过将煤油、植物油与灰粉按一定比例混合调配形成类似于油漆的胶状物质,将其均匀的涂抹在试验模型表面,形成一层油膜。在模型运动过程中,模型表面的流场将会改变油膜的状态,通过拍照对比试验前后油膜的变化就可以判断流场的状态,例如流动分离点的位置等[58],如图14所示为半球油膜法流显图。

图14 半球油膜法流显图[59]Fig. 14 A flow field displayed by the hemispherical oil film method[59]
丝线法流态显示技术是采用颜色鲜艳轻质柔软的普通丝线或荧光丝线粘贴于试验模型表面,通过试验中丝线的状态显示模型表面的流态。在磁浮飞行风洞中,可以直接开展油膜法和丝线法流动显示试验。
3.3.2 气动热测量
磁浮飞行风洞中开展试验模型的气动热测量具有强烈的工程需要,且磁浮飞行风洞的气动热测量能够借鉴并发展现有传统风洞中的测量技术,如红外热像技术、温敏漆技术、表面热膜测量法、表面热流测量法等。
红外成像技术把被测目标所发出的红外辐射,通过灰度级或伪彩色的热图像显示,得到被测目标温度场的非接触测量技术。气流流过被测件表面时,由于湍流边界层内不规则脉动产生的热交换,被测件表面不同位置温度不同。通过红外探测设备,将被测件发出的红外辐射信号转化为视觉信号,模拟出被测件表面温度的空间分布,最后形成热像图,从而观察目标转捩位置[60-61]。
红外热像探测在进行红外识别时,辐射对比度定义为被测件和背景辐射出射度之差的绝对值与被测件和背景辐射出射度两者最大值之比:
式中,C为辐射对比度;MT为被测件辐射出射度;MB为背景辐射出射度。
被测件和背景的有效辐射出射度分别为:

式中, εT为被测件发射率;εB为 背景发射率;σ为斯蒂芬-波尔兹曼常数;TT为 为被测件表面温度;TB为背景温度。
温敏漆技术是一种大面积测热技术,它是利用温敏材料的光致发光特性随温度的变化而变化的特点来进行模型表面温度分布测量的光学测量技术。
应用温敏漆技术在风洞开展测热试验,首先将温敏材料喷涂于模型表面,将模型安装于风洞内。
试验过程中采用大功率激光照射模型表面温敏材料、同时采用高速摄像机对温敏材料发光情况进行时序捕捉并通过高速采集装置进行记录。试验后对采集数据进行量化分析,获得模型表面的温度、热流分布特性,得到转捩位置[62-63]。
在温敏漆技术中,使用热流传感器来进行数据采集,其热流计算公式为:

式中:qs为 模型表面热流,ρ、c、k为温敏材料热物性参数,Ts为 模型传感器测得模型表面温度,t为试验时间。
在磁浮飞行风洞中,试验模型处于高速运动状态,在此前提下,红外成像技术以及温敏漆技术能够很好地应用于磁浮飞行风洞试验中,从而进行高速条件下边界层的转捩测量。
3.4 激波测量
管道内超高速轨道交通运行过程存在局部跨、超声速流动,需要精确捕捉流场中的激波。高超速气动问题的试验中较为成熟的流场显示技术主要有油膜法、丝绒法、PIV、纹影法等。其中纹影、阴影和干涉条纹技术,广泛的应用于激波结构的显示,能给出密度相关的流场信息。
纹影法是利用空气密度变化光线折射率的关系,使可压缩流场中的激波、压缩波等密度变化剧烈的区域形成可观察、可分辨的图像[64-65]。图15所示为反射式平行光纹影系统光路图。其中L1为凹面镜,光源位于L1一倍焦距稍向外处,用于产生平行光。L2为纹影镜。

图15 纹影法原理图[66]Fig. 15 A sketch of the schlieren method[66]
在平行光区域放置相物体,设入射到相物体的入射光强度为式(8)。通过相物体引起相位滞后的光强度可表示为式(9):

式中,E0cos(ωt) 代表直射光,项是其他正负各级夫琅禾费衍射光的总和,它含有φ,包含了相物体分布的信息,这两项的相干叠加构成了屏幕上相物体的像。在L2的焦点处放置一个刀片,通过调整刀片位置挡住零级光和一侧全部的衍射光,于是屏幕上的光强分布就由相移分布 φ决定。它显示出相物体周围的折射率分布,当相物体处介质折射率发生变化,特别是激波产生的区域,在观察屏上将观察到明显的光强明暗分布。
纹影法测试系统包含光源、光路系统、高速摄像机、同步控制器、数据采集系统。试验开展前调整刀口位置与方向使得显示器中图像亮度均匀变化获得清晰的试验结果(如图16)。通过采用高速摄像机对观察屏图像进行拍摄并传递至数据采集设备完成纹影试验。对于磁浮飞行风洞,也可考虑在风洞管路沿程布置若干高速摄像站位及观察窗来进行纹影拍摄。
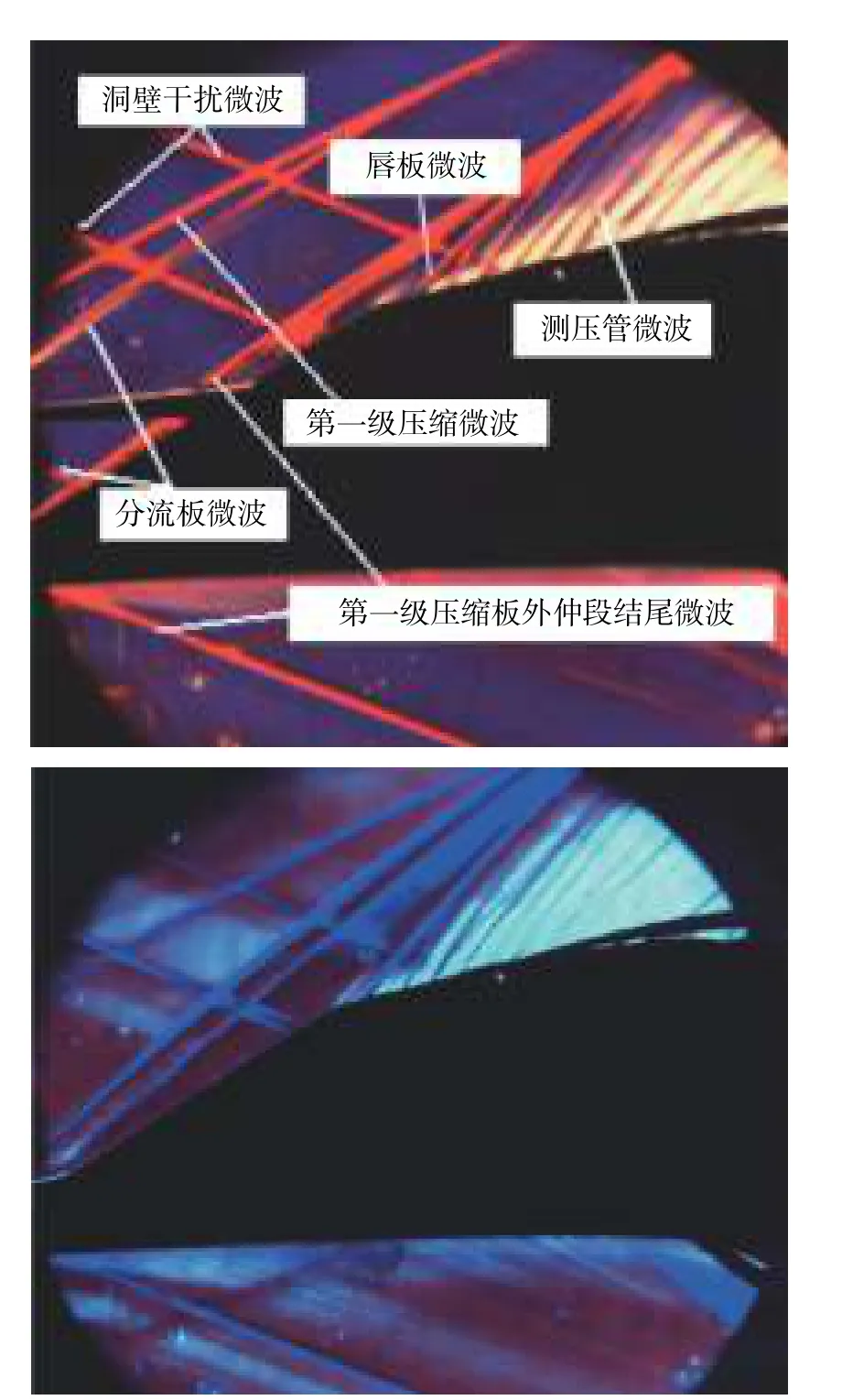
图16 纹影法测量图[67]Fig. 16 Flow visualizations by the schlieren method[67]
3.5 表面压力测量
准确测量试验模型壁面压力、剪切力、应力非常重要,如图17为NASA 太空发射系统载人飞船表面压力测量试验。常用测压技术包括静态压敏漆技术、动态压敏漆技术和压力传感器技术等。其中压敏漆技术是风洞试验大面积测压与流动显示的重要工具,压敏漆在不同压力下呈现不同的颜色,使用高速摄影机能够直接观测模型表面的压力分布,动态压敏漆时间响应速度能够达到几十微秒量级[68]。压力传感器测量技术根据测试传感器内部电阻应变片的阻值变化,转化为电信号获得表面压力变化。

图17 NASA 太空发射系统载人飞船瞬态压敏漆测试图[69]Fig. 17 A SLS crew vehicle painted with uPSP[69]
磁浮飞行风洞能够试验大尺寸甚至全尺寸模型,模型具有较高速度,测试时间窗口较小。采用动态压敏漆技术需配合高速摄影设备开展测量,若使用无线压力传感器需要解决高速运动及电磁环境下,数据采集干扰等各种难题。
3.6 气动噪声测量
传统风洞气动噪声测量试验主要包括噪声源识别和远场噪声测试。磁浮飞行风洞能够做到大尺寸,实现高速列车模型全尺寸试验,开展车内、车外噪声的测量,如图18。在测试中,可使用传声器阵列来识别模型的噪声源分布、评估部件级噪声。基于传声器阵列测试的声场可视化,包括近场声全息和波束成形两大类方法,是声场试验分析中的最直观、最有效的手段,可以获得声场的全部信息,包括声源表面的声压和振速分布,任意位置声场,甚至可以分析各声源对敏感点噪声的贡献[70]。

图18 高速列车车内外气动噪声测试[71]Fig. 18 Noise measurements inside and outside a high-speed train [71]
传声器阵列数据处理时首先生成传声器阵列互谱矩阵(CSM)。具体计算时首先将传声器阵列的信号数据分块,采用快速傅里叶变换(FFT)将时域数据转换为频域数据。那么传声器阵列的互谱矩阵可表示为:
式中矩阵元素为:

其中,m表示第m个传声器,K表示阵列信号数据块数,Pmk(f)表示第m个传声器第k段数据块的频域信号,Ws为数据窗函数因子,上标*表示共轭。传声器阵列的数据处理算法采集算法可使用基于“延迟求和”的波束成形算法,阵列的指向向量为:

式中,AM、 ω ΔtM,shear分别表示由风洞射流剪切层引起的第M个传声器的振幅修正因子及相位修正值,k表示声波波数向量,x表示扫描点与传声器之间的距离向量,rM表示声波扫描点与传声器之间的传播距离,rc表示阵列中心点与扫描点之间距离。声学风洞试验时传声器阵列的输出功率谱为:

信号采集方面,传统风洞中由于试验模型和传声器阵列都是静止的,因此传声器的信号采集时间(试验时间)不受限制。在数据处理过程中,为便于抑制背景噪声、提高信噪比,一般采用分块平均的方法,要求信号采集时间大于30 s。磁浮飞行风洞试验段长度在100 m左右,根据模型的运动速度不同,试验时间大约为1 s。因此,想要获得有意义的数据,就需提高数据采样率,并发展先进的抗混叠数据处理技术。另外,为了对模型的噪声源进行识别定位和准确评估,需要发展基于传声器阵列的高速运动物体的噪声源测量技术[72]。
4 应用需求分析
磁浮飞行风洞具有试验能力优势,在诸多重大工程和重大型号研制中有众多应用场景,对国民经济建设和空气动力学学科发展具有重大意义。磁浮飞行风洞能够满足下一代时速400 km级高铁、时速600 km级高速磁浮等先进轨道交通重点型号设计研发及车辆空气动力学学科基础和前沿问题研究的需求,同时是发展超声速客机、深空探测等高新技术产业的重大科技基础平台。
4.1 超高速轨道交通
超高速轨道交通设计速度大幅度提升的同时,结构振动、气动噪声、耦合控制、会车效应、管道效应及激波影响等特殊的空气动力学问题更加凸显[73-76]。为解决这些问题,需要模拟列车与管(隧)道以及交会列车之间的相对运动,真实反映列车绕流与周围环境之间的相互干扰。但是,目前国内常规风洞“体静风动”的试验方法,不能模拟列车交会和穿越隧道过程,且存在风洞洞壁效应,难以消除附面层影响,无法满足超高速列车空气动力及其交叉学科精确模拟的需要。国内现有常规动模型设备在运行速度、模型尺寸、气流环境控制等方面也难以满足超高速列车工程化试验需求[77]。
4.1.1 管道运行及会车研究
管道对超高速列车运行产生的压力波、声波与气动热的发展存在明显限制。管壁影响下反射压缩波及膨胀波叠加形成的复杂波系、有限空间空气与隧道壁面摩擦问题产生的气动热效应,管道车体相互作用形成的气流加速效应伴随激波现象使得管道内形成复杂空气动力学及热力学现象[78-80]。
高速列车会车时周围流场受到强烈扰动,在列车头尾位置出现明显的压力梯度,并伴随剧烈瞬态压力波动,列车侧面显著的压力冲击形成明显侧向力作用。图19为CRH-0503标准动车组会车试验。瞬态侧向力幅值随列车运行速度呈现显著增大,影响列车多个部件可靠性、寿命及列车运行安全性。会车效应导致的列车内部压力变化与噪声问题影响乘客气动舒适性[81]。

图19 CRH-0503标准动车组420 km会车试验[81]Fig. 19 A passing test of CRH-0503 standard EMU with a relative velocity 840 km/h[81]
磁浮飞行风洞中,风洞截面尺寸及管道长度具有延展能力,能够适应高速列车复杂的几何外形和大长细比形式,较为真实反映列车运动时关键部件外形对结构、气动性能的影响,同时采用大尺寸试验模型能够实现车体内部环境的测试与研究,提供超高速列车管道运行及会车情景下,全车及部件非稳态非对称气动力、气动噪声产生与传递、列车运行安全稳定性、人体舒适性等关键问题的试验平台。
4.1.2 边界层空气动力学问题研究
边界层转捩一直是流体力学领域研究的重点和难点,准确预测边界层转捩点对未来高速设备研制具有重要意义。当前,边界层转捩机理研究进展相对缓慢的一个重要原因是缺乏可靠的试验研究条件。在超声速条件下,风洞噪声是影响边界层转捩试验准确性的主要因素。传统高速、超高速风洞的气流驱动方式会产生较高的背景噪声,导致风洞来流脉动强度与真实飞行环境相比高一到两个数量级。超声速风洞的噪声问题会对试验模型表面流动的转捩过程产生严重影响,降低试验结果的准确性[82-83]。因此,要在常规风洞中进行转捩机理研究,必须发展超声速静音风洞。但目前大尺寸、大口径、宽速域的静音风洞技术尚未达到工程化水平。
磁浮飞行风洞具有湍流度低,模型悬浮于风洞中的特点。因此,相比于传统风洞其来流噪声更低、湍流扰动更小,测试环境更接近真实飞行环境的来流条件。悬浮试验模型不会受到洞壁或常规支撑结构振动的影响,可进一步减少试验设备对转捩过程的干扰。磁浮飞行风洞是开展边界层转捩、激波边界层干扰研究的理想设备,能够为我国高速轨道交通空气动力学问题研究提供优良的环境。
4.1.3 跨、超声速地面效应研究
高速列车运行速度大幅提升导致列车车底和地面之间的气流干扰凸显,列车底部流动非稳态复杂特征增强,存在明显的地面效应,如图20所示为地面效应中的气动干扰[84]。高速列车地面效应影响会车体气动力特性,带来边界层效应。传统风洞采用地面边界层抽吸方法难以限制沿来流方向地面边界层厚度过分增大现象。
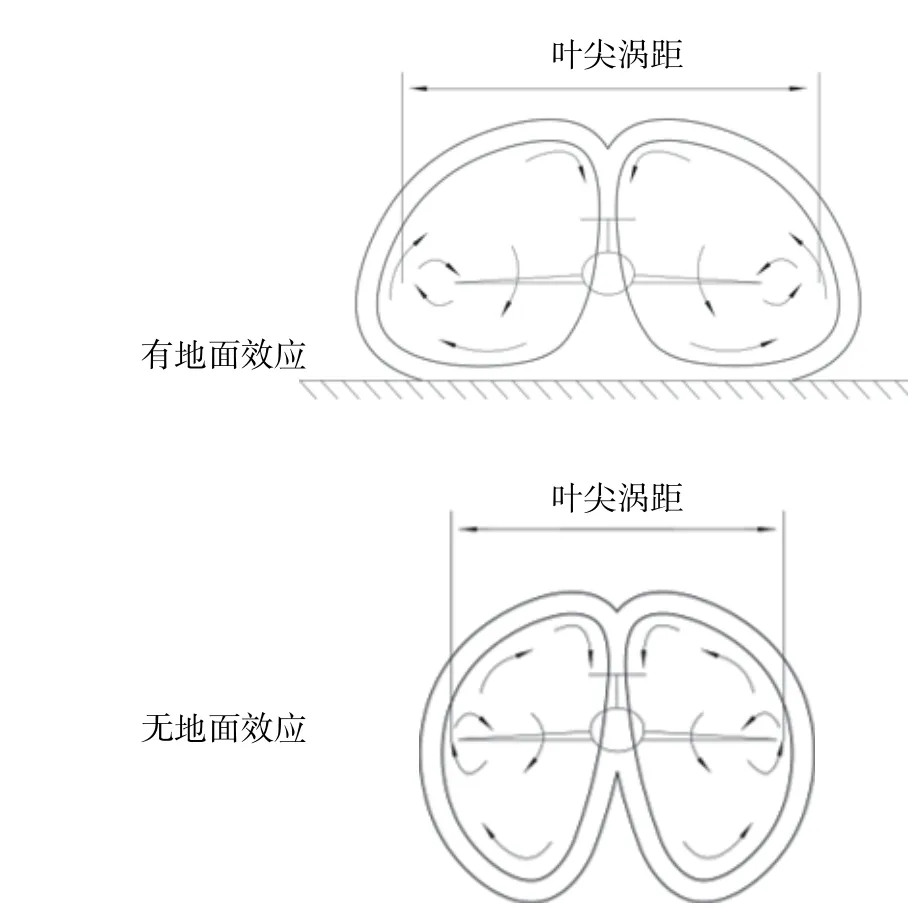
图20 地面效应中的气动干扰示意[84]Fig. 20 A sketch of aerodynamic interference induced by the ground effect[84]
磁浮飞行风洞“体动风静”的试验方式可以模拟高速列车近地面运动时气流静止、地面静止的真实运行条件,可针对跨、超声速地面效应影响下的超高速列车空气动力学问题开展相关试验研究,为我国超高速轨道运输发展提供支撑。
4.2 其他领域
4.2.1 民用航空
超声速客机、超声速运输机等设计研发需要突破声爆预测及其抑制技术、低声爆/低阻布局优化及超声速减阻等关键技术[85]。现有常规风洞存在气流环境对声爆测试结果影响大、声爆试验模型小、模型的外形模拟精细化程度低等问题[86-87]。此外,传统高速风洞的气流噪声、湍流度和流场特性等与真实飞行条件存在差别,这对超声速客机的减阻/降噪综合评估也会产生影响。
磁浮飞行风洞不存在气流噪声的干扰问题,风洞背景噪声低,可以有效解决远场声爆预测、近场激波精确测量等问题,有效提升声爆试验结果的可信度。风洞采用大截面试验段,大幅提升试验模型的尺寸和外形模拟的精细度,满足新一代自适应变循环高效发动机的研发试验需求,有效支撑新一代超声速客机先进低阻力气动布局设计。磁浮飞行风洞湍流度极低,可模拟超声速客机在平流层飞行时的低扰动、低湍流度的大气环境,可避免常规风洞气流扰动对机翼表面流场的影响,从而提高超声速气动阻力预测的精度,进而为精细化的减阻技术研究提供优良的试验环境保障。
4.2.2 深空探测
深空探测是人类探索宇宙奥秘,进一步追求发展空间的必然途径。图21为在美国全尺寸气动综合设施(NFAC)中开展的火星降落伞风洞试验。传统风洞难以实现高空、深空等复杂气体环境模拟,不能真实复现高空的热环境、压力环境、等离子等对设备结构的影响,难以模拟行星表面大气环境,不适合开展深空飞行器、飞行器部件跨速域、低密度条件下的气动特性研究[88]。
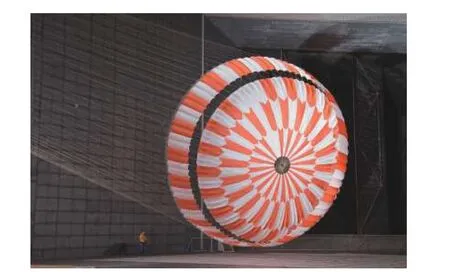
图21 美国NFAC风洞开展的全尺寸火星降落伞风洞试验[88]Fig. 21 A full-scale Mars parachute test in the NFAC (National Full-Scale Aerodynamics Complex) wind tunnel[88]
磁浮飞行风洞可在封闭管道内通过降压方法模拟复杂大气环境低密度条件,通过置换管道内气体介质的方法模拟多组分真实气体,构建接近真实的深空及行星大气环境,进一步突破传统风洞难以研究的高空低雷诺数效应、非定常气动特性、气动/结构耦合研究等一系列关键技术问题,可实现火箭发动机地面点火试验、高空环境试验、边界条件可靠性试验;进行航天器降落伞系统开伞过程的加减速行为和冲击动力学特性试验;开展各类翼飞行器、探测器、减速伞等各类飞行器探测器的气动特性研究等。对航空航天事业进一步发展提供坚实科学基础研究平台。
5 总 结
在超高速轨道交通、航空航天等领域的研究中,对于气流噪声难控制、低湍流度难实现、高空低雷诺数及宽雷诺数范围难调节等问题,磁浮驱动飞行风洞是一种具有变革性的新概念风洞。
磁浮飞行风洞试验技术集合了传统风洞和动模型试验技术的优点,采用先进的气动力精确测量、流场显示、气动热测量、气动噪声测量等技术,可以实现湍流减阻测量、边界层转捩测量等,能极大支撑特殊环境的空气动力学问题及特种工程技术问题的试验研究。
磁浮飞行风洞是下一步发展高速轨道交通、超声速客机、深空探测等高新技术产业的重大科技基础平台,可用于真空管道高速磁浮列车的管道-车体激波边界层干扰、活塞效应、地面效应、气动热效应、边界层转捩等基础科学问题的研究,也可解决跨、超声速条件下,飞行器噪声精确测量、转捩位置精确预测、飞行速度急剧变化过程中的非定常气动特性预测等问题。在诸多重大工程和重大型号研制、未来航空航天和高速轨道交通领域重点型号设计研发中,磁浮飞行风洞具有重要的支撑作用,对国民经济建设和空气动力学学科发展具有重大意义。
