天舟二号货运飞船全相位自主快速交会对接技术和在轨验证
2021-11-10陈长青刘宗玉
张 强, 陈长青, 刘宗玉, 郝 慧, 奚 坤, 苏 晏, 刘 阳
北京控制工程研究所, 北京 100094
0 引 言
从上世纪60年代到现在,交会对接从早期可靠性低的小相位(指追踪航天器和目标航天器的相位角差,下同)直接交会、空间站阶段高可靠的2~3天交会对接,发展到2012年以后安全可靠的快速交会对接阶段[1].自主快速交会对接是未来交会对接特别是载人交会对接的发展趋势[2-4].
20世纪90年代开始,多个国家进行自主交会对接技术验证,典型的有:日本的ETS-VII和HTV、美国的XSS系列卫星、美国的DART卫星、美国的“轨道快车”计划和欧洲的ATV飞船等[5].自主交会对接是交会对接发展的另一个趋势,国外自主交会对接多体现在近距离控制段.
我国载人三期空间站建造和运营期间,需要密集的交会对接发射任务,开发高效、强适应性的快速交会对接方案具有非常重要的意义.从2012年开始,我国学者同步关注快速交会对接技术,并在调相策略[6-8]、火箭影响[9]、测控[10]等方面进行了概念性和开拓性的研究.
2017年9月12日,天舟一号货运飞船完成了我国首次在轨自主快速交会对接飞行试验;2021年5月30日,天舟二号货运飞船是我国首次采用自主快速交会对接技术完成了飞行任务,标志着我国成为第二个掌握地球轨道快速交会对接技术的国家.
本文介绍我国天舟货运飞船全相位自主快速交会对接方案,并给出飞行控制实施方案,以及在轨飞行结果.
1 交会对接发展概述
1.1 快速交会对接
1.1.1 美苏早期快速小相位角交会策略
苏联和美国关于空间交会的最早尝试是从执行快速交会任务开始的[6].追踪航天器通常经过1~5圈的绕地飞行后完成交会任务.这种方案要求通过协调目标航天器和追踪航天器的发射时间,以形成两航天器间特定的相对距离或者相位角条件,从而实现快速交会.
针对苏联的交会任务分析发现,有四次任务采用了这种快速交会方案.这些任务都满足如下的步骤:
(1)目标航天器被发射到周期为1天的回归轨道,高度大约200~230 km.
(2)通常1天后,追踪航天器被发射到相同的轨道.
(3)在追踪航天器进入轨道时,它已经在目标航天器的邻近位置.
如果火箭能把追踪航天器精确地送入两个航天器能提供相对导航信息的无线电系统工作范围内(Igla的工作范围为25 km),就可以实现交会,也就是说,追踪航天器必须被火箭送入距离目标航天器25 km的范围内,其成功概率不大于70%.
1.1.2 俄罗斯快速交会对接
2012年8月,俄罗斯进步M-16M货运飞船与国际空间站完成不大于6h快速交会对接任务.从2012年开始俄罗斯每年发射近十艘进步货运飞船/联盟载人飞船,见表1,采用快速交会对接与国际空间站对接占有较大的比重.俄罗斯已基本掌握快速交会对接技术.
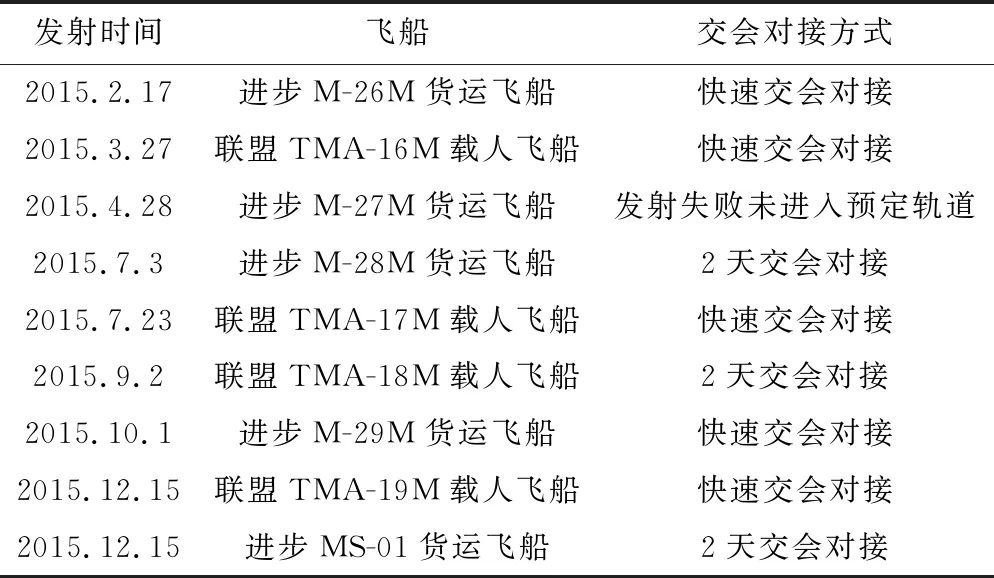
表1 2015年俄罗斯发射的进步/联盟飞船交会对接
俄罗斯的快速交会对接方案由传统的2~3天方案通过优化飞行时间得到的.俄罗斯的四圈快速交方案如图1[3]所示.

图1 俄罗斯快速交会脉冲示意图
图1中,1~5是轨道圈次,V1,V2,V3,V4是制导脉冲,轨道线下边是追踪航天器的高度变化.
1.2 自主交会对接
2000年前后,主要航天大国都在进行自主交会对接试验[1,5],即不依赖于地面,由星(船)软件进行自主导航、制导和控制.
工程试验卫星ETS-VII于1997年11月28日由H-II火箭发射升空,在轨期间共进行了两组自主交会对接技术的试验,对交会敏感器,制导、导航和控制算法,中途撤离、避碰操作和软对接等技术进行了验证.
试验小卫星系列XSS.是研制一种具有在轨检查、交会对接以及围绕轨道物体近距离机动能力的全自主微小卫星.XSS-10卫星于2003年1月29由Delta II运载火箭发射入轨.发射当天XSS-10卫星与Delta II的第二级进行交会,用摄像机进行捕获、跟踪和拍摄,并实时将图像传回地面控制中心.XSS-11卫星于2005年4月11日由“人牛怪”火箭发射入轨,在轨期间对火箭的上面级以及邻近轨道上的8个目标进行交会和接近机动,验证了航天器在近距离围绕空间目标进行多种类型机动、实现快速脱离目标和进入自然轨道的自主交会能力.
美国轨道科学公司的“自主交会技术验证”DART计划于2005年4月15日由“飞马座”火箭发射升空,主要任务是在轨道上与“多路径超视距通信卫星”MUBLCOM进行一系列的自主交会、逼近和绕飞操作,验证DART卫星所携带的交会敏感器AVGS、接近操作ARPO软件、计算机和推进系统等.
“轨道快车”于2007年3月8日晚,由“宇宙神-5”火箭发射升空.从3月8日到7月12日这4个多月的时间里,“轨道快车”通过8次试验演示了一系列在轨卫星服务技术,包括自主交会对接、部件转移和推进剂转移、机械臂操作等,出色地完成了所有的试验任务,成为世界上首个具有自主在轨服务功能的航天器.
1.3 交会对接趋势分析
快速交会对接大大降低航天员的负担,减少飞控时间,提高在轨服务、在轨救援的能力.自主交会对接,能实时根据天上的状态制定相应的对策,提高了航天器的智能,能应对可以预见的故障,自主高效完成任务.在可靠性满足的基础上,自主和快速是交会对接发展的两个趋势.
快速交会对接对火箭入轨条件提出较高的要求,也是20世纪60年代小相位快速交会对接任务成功率低的原因.自主性目前国内外的设计多体现在中近距离交会段;远距离导引受测量条件、星(船)上计算机计算能力、多解下飞行程序确定性、制导脉冲求解唯一性等约束,一般由地面执行或地面配合执行.
我国已进入载人三期空间站组建阶段,需要频繁发射载人飞船和货运飞船,需要发展自主快速的交会对接技术.
天舟一号货运飞船突破远距离导引综合修正段制导方法,提出6.5 h快速交会对接方案,解决了快速交会对接在轨自主计算解的存在、唯一,以及执行脉冲序列确定性难题.
天舟二号货运飞船除自主快速交会对接能力外,通过增加大相位追及段制导策略具备全相位自主交会对接能力,即具备应对延迟发射(几分钟内)、推迟发射(推迟一天、两天等)的交会对接能力.
2 天舟二号货运飞船全相位自主快速交会对接方案
2.1 飞行方案
自主快速交会对接过程从距离上讲是一个由远及近的过程,从精度上讲是一个由粗到精的过程,如图2平面内的交会对接过程,安全椭球和禁飞区中心是目标航天器.全过程由远距离自主导引段和近距离自主控制段组成,不同于一般的交会对接,其远距离导引段飞行时间短[11].

图2 快速全相位自主交会对接两个航天器相对距离示意图
远距离自主导引段由大相位追及段、调相段和综合修正段组成,完成远距离引导至目标航天器后下方约50 km的位置处,建立相对导航,转入近距离自主控制段.
近距离自主控制段段分为寻的段、接近段、平移靠拢段和对接段,自主控制段自主完成两个航天器接近、对接等任务.
2.2 远距离自主导引
入轨后,货运飞船根据入轨时两个航天器的相位角(0~360°)、高度差计算交会对接任务总飞行时间,并确定大相位追及段脉冲的执行时刻.在大相位追及段,通过一个脉冲,把货运飞船导引到调相段入口.调相段入口由空间站的相位和高度确定,一般在标称值附近小范围波动.如果相位角合适,不需要大相位追及段.
调相段通过调整货运飞船轨道高度,实现对入轨相位角差或大相位追及段相位角执行误差的修正,同时修正入轨轨道面外偏差.货运飞船根据入轨相位的不同,调相段有两脉冲调相和四脉冲调相两种情况.
综合修正段针对调相后特定的高度和相位情况,通过自主自适应调整脉冲的执行时机和脉冲大小,实现对货运飞船相位和高度的精细调整,保证远距离导引段结束时两个航天器飞行轨道基本一致,满足近距离自主控制段初始条件的高精度要求.综合修正段采用两脉冲制导策略.
2.3 近距离自主控制
近距离自主控制段是从远距离自主导引段终端开始,在相对测量信息引入后,船上进行自主相对导航并自主实现近距离相对位置和姿态控制,直至追踪航天器和目标航天器的最后对接.
寻的段的主要任务是在燃料优化的前提下,消除远距离导引的制导和控制误差.经过若干次轨道控制后,货运飞船将进入与目标飞行器相同的轨道上,即与目标飞行器共面、且高度与目标飞行器相同的后面大约5 km处[12].
接近段的任务是捕获对接走廊.对接走廊是以目标飞行器对接轴为中心的一个圆锥.由于货运飞船在空间站后向对接,在接近过程中采用CW制导和视线制导结合的制导策略.
平移靠拢段的任务是为对接提供初始条件.在该阶段采用六自由度控制方法,实时调整两个航天器的相对位置和相对姿态,保证货运飞船在对接走廊内沿设计好的轨迹和姿态与空间站逐步接近并对接.
2.4 天舟二号货运飞船快速交会对接的主要特点
天舟二号货运飞船具备全相位自主快速交会对接的能力.主要特点如下:
(1)全相位.由于天舟二号货运飞船具备全相位交会对接的能力,在飞行方案设计中,天舟二号货运飞船针对正常飞行任务设计了6.5 h交会对接模式,还针对火箭发射可能存在的偏差,设计了提前一圈的5h方案,以及推迟一圈的8h方案.由于天舟二号货运飞船具备全相位交会对接的能力,在火箭经过两次推迟发射后,天舟二号货运飞船可以设计正常的交会对接方案,以及推迟一天的方案、推迟2天的方案……推迟5天的方案.全相位交会对接能力放宽了对窗口的约束,提高了大系统应对故障的能力.
(2)快速.天舟二号货运飞船的交会对接在燃料、火箭入轨约束下,具备当前相位下交会对接时间最短的能力.在空间站可以调相下,可以选择合适的入轨相位,实现不同时间的快速交会对接,譬如5 h快速交会对接、6.5 h快速交会等.在空间站不调相或飞船推迟发射下,例如要求货运飞船必须在某一天发射,则天舟二号能根据当前的相位自主选择时间最短的交会对接模式.当天舟二号推迟了一天发射时,根据测控系统预报,在当天发射两个航天器的相位为150°左右,则根据船上的算法,会自动执行最快速的近30 h的交会对接模式.
(3)自主.天舟二号货运飞船具备全相位自主快速交会对接能力.飞船能够根据火箭入轨时两个航天器的高度差、相位差等信息自主选择飞行时间和交会模式;根据飞行轨迹自主设置敏感器加电、发动机管路预热、对接机构状态准备等;自主绝对导航、相对导航、姿态确定,自主进行帆板控制;自主求解变轨脉冲,自主进行发动机开关机等.
2.5 仿真验证
2.5.1 典型算例
入轨时刻两个航天器的相位角差为83.98°,其他轨道高度、倾角等与一般交会对接一致.
经过远距离制导,两个航天器的半长轴a变化如图3所示.

图3 半长轴变化
2.5.2 遍历仿真
入轨时刻两个航天器的相位角差为14~100°,其他轨道高度、倾角等与一般交会对接一致,进行了375次的遍历仿真,如图4所示.
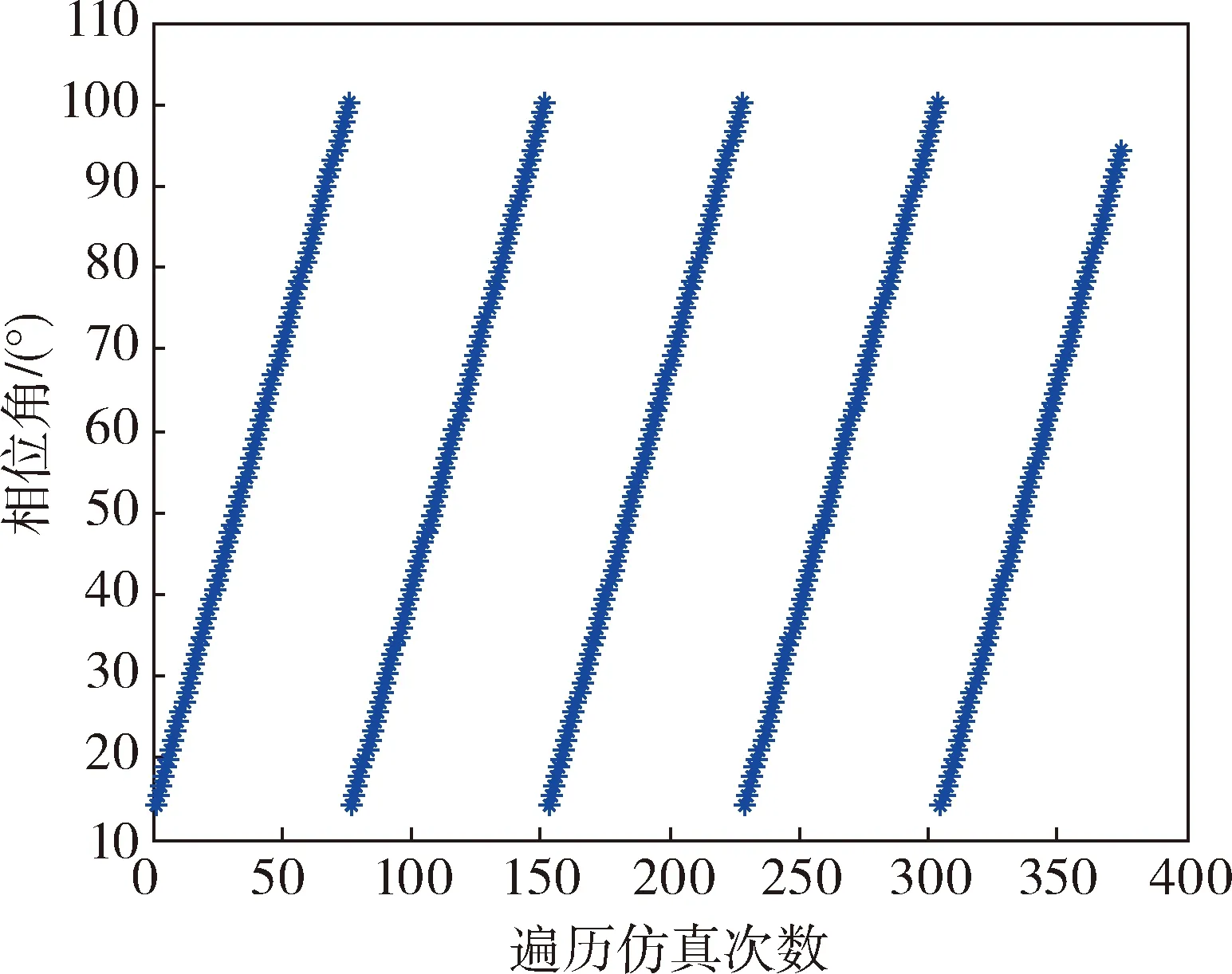
图4 快速全相位自主交会对接初始相位角
船上软件自主计算大相位追及段脉冲,脉冲时间和脉冲大小如图5~6所示.
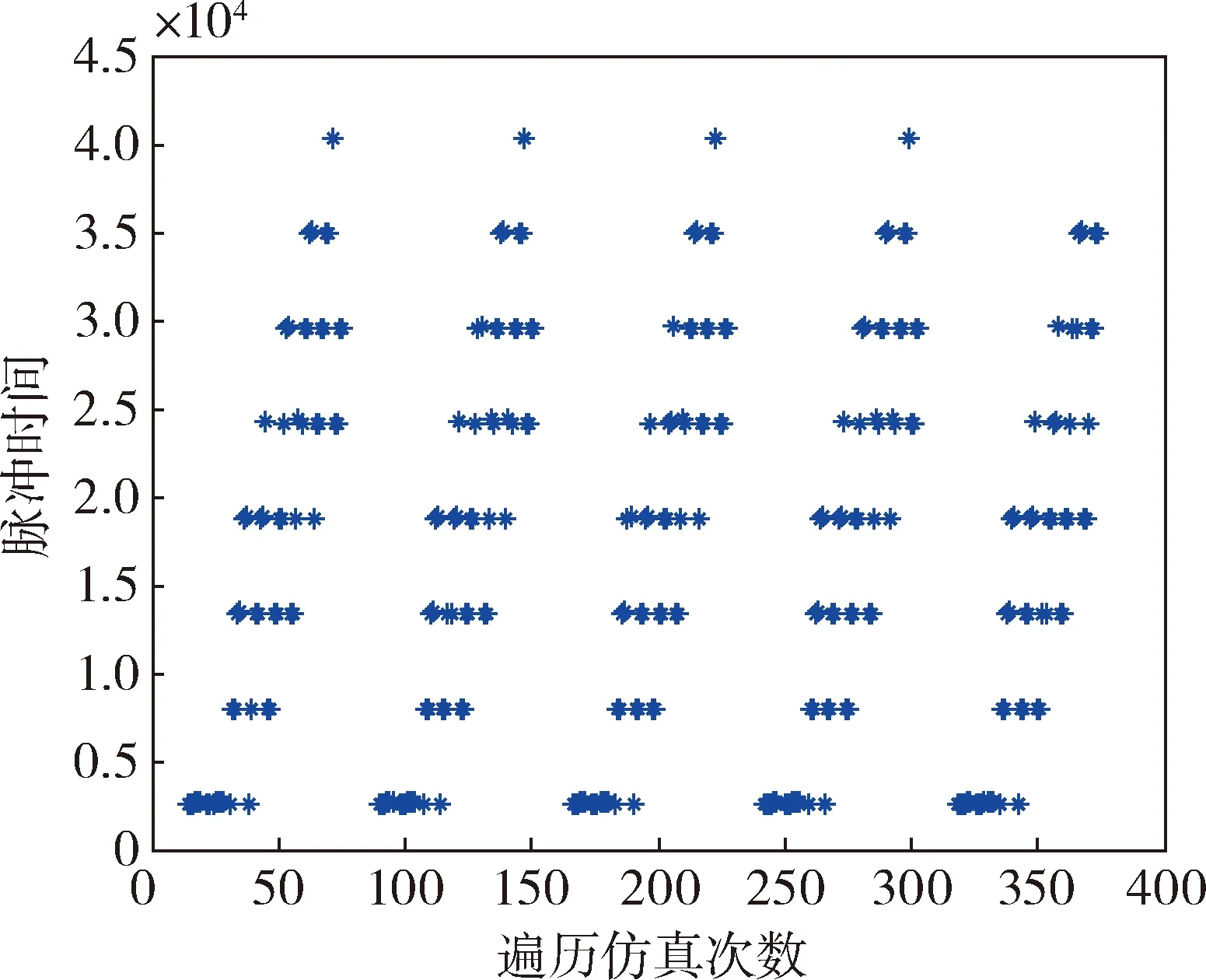
图5 脉冲时间
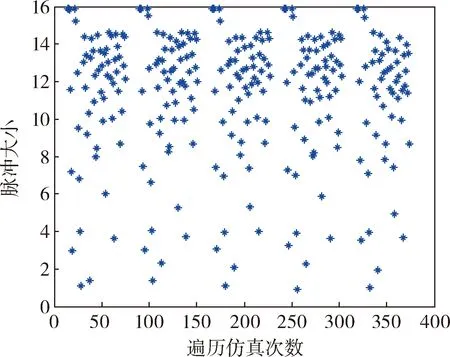
图6 脉冲大小
不同的相位角下,货运飞船在不同的时间完成远距离导引,并实现交会对接.远距离导引终端时间如下:
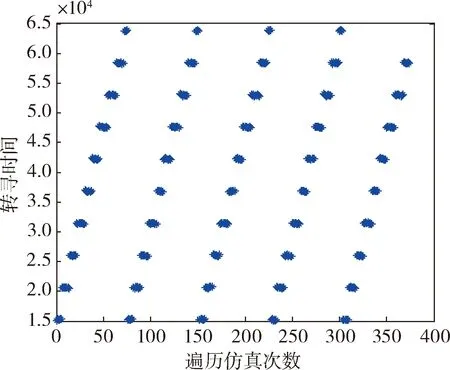
图7 远导终端时间
3 飞控实施和在轨飞行
3.1 自主快速交会对接方案
天舟二号货运飞船具备全相位自主交会对接的能力,即入轨时两个航天器相位角差为0~360°都能完成快速交会对接.对于一次确定的任务,具备确定的相位角,会自动选择确定的快速交会对接模式.
天舟二号货运飞船飞行任务是6.5 h自主快速交会.远距离导引段由调相段和综合修正段组成,6个制导脉冲策略.
考虑火箭入轨存在偏差以及可能推迟或提前发射,设计了5~8 h快速交会对接方案.根据火箭入轨的相位角和高度,如果火箭发射正常,则执行远距离六脉冲的6.5 h快速交会对接方案;若货运飞船相位提前,则执行5 h快速交会对接方案,远距离导引为4个脉冲,远距离飞行时间少一个轨道周期;若货运飞船相位推迟,则执行8 h快速交会对接方案,增加一个轨道周期的大相位追及段,远距离导引段为7个脉冲.货运飞船5~8 h快速交会对接方案如表2所示.
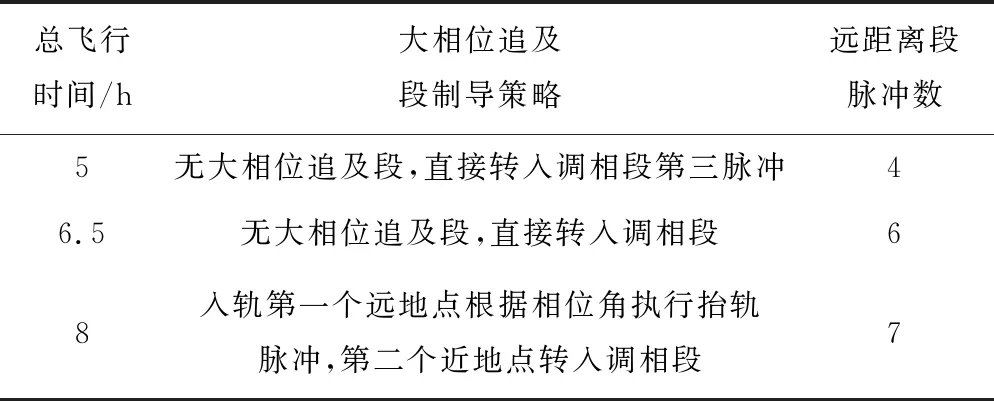
表2 货运飞船5~8 h快速交会对接飞控实施方案
3.2 推迟一天/多天发射飞行方案设计
货运飞船具备全相位交会对接能力,具备应对推迟1天、推迟多天发射交会对接的能力.在天舟二号飞控准备中,除正常的5~8 h快速交会对接实施方案外,还详细设计了推迟1天发射、推迟2~5天发射的实施方案.
推迟一天发射,货运飞船入轨后相位角为150多度,按标称入轨状态飞行时间约1天.入轨后进入大相位追及段,在大相位追及段自主计算脉冲执行时机和大小,把货运飞船导引到调相段入口,再通过六脉冲远距离制导,实现该相位角下的快速交会对接.
3.3 天舟二号货运飞船快速交会对接任务
2021年5月29日21时5分,天舟二号货运飞船由长征七号遥三火箭发射入轨.在船上软件的自主规划和精准控制下,货运飞船经过远距离六脉冲调相,近距离寻的、接近和最后平移靠拢,于5月30日4时46分与空间站高精度对接.
4 结 论
本文对21世纪以来交会对接任务进行分析,指出自主、快速是当前和未来交会对接发展趋势.为适应我国载人三期空间站工程建造和运营期间频繁发射货运飞船而对交会对接提出的更高要求,天舟二号货运飞船设计了全相位自主快速交会对接方案.货运飞船全相位自主快速交会对接能适应发射延迟(分钟量级)、发射推迟(天量级)等工况,大大提高了系统的故障应对能力.
天舟二号货运飞船入轨自主快速交会对接是世界上首次进行的全自主快速交会对接任务,验证了自主快速交会对接技术,为我国空间站工程后续任务奠定了坚实的技术基础.