嫦娥五号探测器GNC系统设计
2021-11-10郑永洁王泽国
郑永洁, 王泽国
北京控制工程研究所, 北京 100094
0 引 言
中国探月工程按照“绕、落、回”三步走计划实施[1],而探月三期嫦娥五号任务的圆满成功标志着三步走计划的成功实现.嫦娥五号任务的主要目的是采集月球样品并将样品安全送至地面.
嫦娥五号探测器由轨道器、返回器、着陆器和上升器4个部分组成,各自承担一定工作,以接力的方式完成月球样品无人采样返回任务[2].四器以组合体形式发射,环月后四器分离为着陆上升组合体(以下简称着上组合体)和轨道器返回器组合体(以下简称轨返组合体),着上组合体实施月球软着陆和月面上升起飞,轨返组合体环月等待,实施月球轨道交会对接,待样品转移后,轨返组合体与上升器分离,携月壤月地转移,在距离地球表面约5 000 km时,轨返分离,返回器携月壤以二次再入方式,返回内蒙古四子王旗着陆区.
历史上月球样品采集并返回地球只有美国和前苏联实现过.而前苏联Luna探测器采用直接返回方式,并未实施月球轨道交会对接;美国Apollo探测器借助宇航员操作实现了月面起飞上升和月球轨道交会对接.嫦娥五号探测器GNC系统由作为探测器的核心分系统,完成全过程飞行控制任务,实现了世界上首次无人月球轨道自主交会对接、高精度自适应月面起飞入轨等任务[3-6].本文给出嫦娥五号探测器GNC系统设计结果以及在轨飞行结果.
1 任务要求
嫦娥五号探测器主要飞行阶段包括[2]:
(1)发射入轨段:从运载火箭起飞,至器箭分离.
(2)地月转移段:从探测器与火箭分离,至到达近月制动点.
(3)近月制动段:从近月制动点到进入目标环月飞行轨道.
(4)环月飞行段:从探测器进入环月圆轨道,至着陆上升组合体运行至动力下降起始点.
(5)着陆下降段:从着陆器距月面15 km动力下降起始点,至软着陆到月面.
(6)月面工作段:从着陆上升组合体着陆在月面,至上升器点火起飞.
(7)月面上升段:从上升器点火起飞,至进入15 km×180 km的目标轨道.
(8)交会对接与样品转移段:从上升器进入15 km×180 km轨道,至上升器与轨道器完成对接并分离.
(9)环月等待段:从轨返组合体与上升器分离,至月地入射点并且轨返组合体完成点火离月准备.
(10)月地转移段:从轨返组合体加速进入月地转移轨道,至到达轨返分离点(地面高度5 000 km).
(11)再入回收段:从返回器与轨道器分离,至返回器安全着陆.
各飞行阶段GNC分系统主要任务要求如下:
(1)在地月转移段、环月飞行段、环月等待段、月地转移段,实现探测器(含分离状态的各器)对日定向、惯性姿态机动及定向控制,消除器箭、器间分离干扰,并依据地面指令进行轨道控制.
(2)在着陆下降段,控制着上组合体进行动力下降并实现月球表面软着陆,目标着陆区域为月球正面风暴洋地区.触月时水平速度、垂直速度、三轴角速度以及姿态等关键指标满足要求,同时着陆器具备一定程度上的安全着陆区域自主优选和自主避障能力[3].
(3)在月面上升段,控制上升器以着陆器为平台进行起飞上升.起飞前进行自主定位和对准,自主完成起飞达到上升目标轨道,满足轨道共面度、半长轴误差、偏心率误差等关键指标要求.
(4)在交会对接段,控制上升器通过远程导引轨道机动,进入圆形环月轨道,位于轨返组合体前上方,之后上升器建立对月定向倒飞姿态,作为目标飞行器,等待轨返组合体逐步靠拢[7-9].轨返组合体根据相对测量敏感器的测量数据,自主进行轨返组合体和上升器间相对导航.根据导航结果自主规划接近过程制导策略,控制轨返组合体完成相对距离50 km至对接飞行全过程,满足对接相对速度、位置等关键指标,并发出上升器停控指令和抱爪捕获指令.上升器接收到停控指令后停控,由轨道器抱爪式对接机构完成对接.
(5)在再入回收段段,根据IMU和GPS接收机的测量数据,进行组合导航计算,结合导航信息进行自主制导,并据此进行返回器姿态控制,完成二次再入飞行,满足过程峰值过载和开伞点精度指标要求[10].
(6)此外,GNC系统还需自主完成各器IMU联合标定、飞行全过程太阳帆板对日指向控制、定向天线对地指向控制等任务.
2 GNC系统组成
嫦娥五号GNC系统由敏感器、控制器和执行机构组成,部署于各子飞行器的3个GNC子系统,通过系统间1553B总线和空空通信连接,共同完成嫦娥五号全过程飞行控制任务,如图1所示.

图1 嫦娥五号GNC系统组成
轨道器GNC子系统的敏感器包括:模拟太阳敏感器、数字太阳敏感器、星敏感器、陀螺组合件、加速度计组合件、IMU处理线路、微波雷达a及应答机、微波雷达b及应答机、激光雷达及合作目标、交会对接光学成像敏感器(CRDS)及合作目标,其CRDS又分为远场CRDS和近场CRDS.执行机构包括:动量轮、双组元推进系统.控制器为中心控制单元(CCU).子系统还包括运行在各设备上的软件,如图2所示.

图2 轨道器GNC子系统组成
返回器GNC子系统的敏感器包括:激光IMU、光纤IMU、GPS接收机.执行机构包括:单组元推进系统(包括:2台20N推力器和10台5N推力器);控制器为GNC控制器(GNCC).子系统还包括运行在各设备上的软件,如图3所示.

图3 返回器GNC子系统组成
着上组合体GNC子系统的敏感器包括:星敏感器、数字太阳敏感器、激光惯性测量单元(IMU)、光纤IMU、微波测距测速敏感器、激光测距敏感器、激光测速敏感器、激光三维成像敏感器、光学成像敏感器、着陆地形敏感器和伽玛关机敏感器,同时GNC采集足垫上的触月开关信号.执行机构包括:动量轮、星敏防尘机构和推力器(属推进分系统,包括:上升器上的1台3 000 N推力器、8台120 N推力器和12台10 N推力器,着陆器上的1台7 500 N变推力发动机和16台150 N推力器).控制器包括:中心控制单元(CCU)和图像处理单元(IPU).子系统还包括运行在各设备上的软件,如图4所示.

图4 着上组合体GNC系统组成
4 GNC系统工作模式
根据探测器的飞行过程和飞行任务,按照轨道器、着上组合体、返回器3个GNC子系统设计不同工作模式以满足任务需要.
轨道器GNC子系统共设计5类工作模式:主动段模式、恒星定向模式、轨控相关模式、交全对接相关模式.各模式转移逻辑如图5所示.各模式说明如下:

图5 轨道器GNC子系统工作模式
1)轨道器GNC上电后首先进入主动段模式,根据器箭分离信号,转入轴对日模式;
2)在恒星定向模式下,可根据注入,自主进入轨接相关模式.
3)交全对接相关模式主要用于从近程自主交会开始.
对接机构实施目标抓捕.平移靠拢段的相对位置和相对姿态控制.
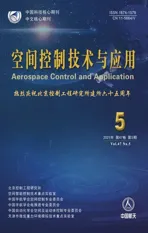
返回器GNC子系统共设计6类工作模式,包括:上电等待模式、单舱滑行模式、初次再入模式、自由飞行模式、二次再入模式和开伞后控制模式.各模式转移逻辑如图6所示.各模式说明如下:
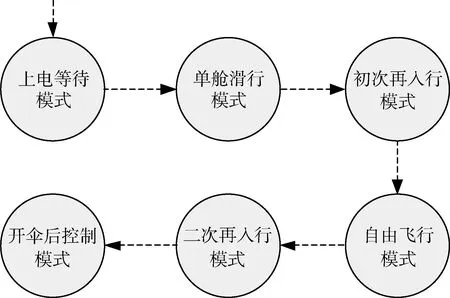
图6 返回器GNC子系统工作模式
1)返回器GNC上电后首先进入上电等待模式,轨迹分离后转入单舱滑行模式.
2)当高度下降到一定程度时,返回器进入大气层边缘,转入初次再入模式,具备升力控制条件,开始利用倾侧角进行弹道控制.
3)在初次再入模式中,当轴向过载趋于0时,气动力明显减弱,转入自由飞行模式.
4)在自由飞行模式中,当返回器处于下降飞行进入大气层后,自主进入二次再入模式,利用倾侧角进行弹道控制.
5)在二次再入模式中,根据高度,转入开伞后控制模式,进行姿态阻尼和剩余推进剂排放.
着上组合体GNC子系统共设计8类工作模式:等待模式、建立飞行状态和巡航相关的模式、轨道控制相关模式、着陆相关模式、月面工作模式、起飞上升相关模式、交会对接近程段模式以及安全模式.各模式转移逻辑如图7所示.各模式说明如下:
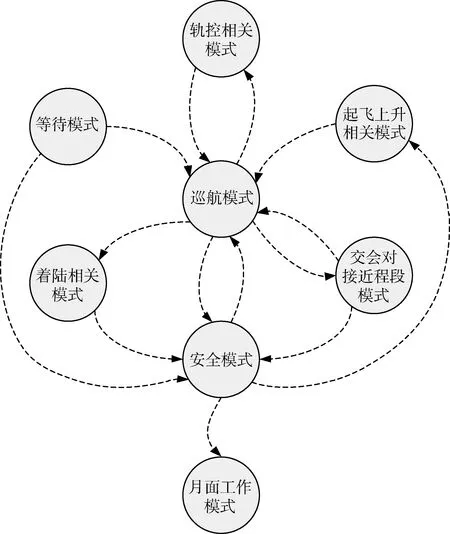
图7 着上组合体GNC子系统工作模式
着上组合体GNC上电后首先进入等待模式,等待模式下收到着上组合体与轨返组合体分离信号后,则转入巡航模式.巡航模式设计为太阳定向姿态,保证整器能源.轨控相关模式主要用于着上组合体的降轨机动和上升器远程导引过程.着陆相关模式用于着陆上升组合体下降并着陆到月面.月面工作模式用于着上组合体停留在月面期间.月面起飞上升模式用于上升器从月面起飞并进入环月轨道.交会对接近程段模式用于交会对接近程导引和对接过程,上升器保持对月姿态稳定.
5 飞行结果
2020年11月24日凌晨04时30分,嫦娥五号成功发射,在其后的23天时间内,先后按既定飞行程序完成近月制动、月面软着陆、月面起飞上升、交会对接、再入返回等任务,于12月17日02时,在内蒙古四子王旗预定区域顺利着陆,取得圆满成功.GNC系统出色的完成了月面起飞上升、月球轨道交会对接、携带月壤以近第二宇宙速度二次再入返回的3个首次任务.
12月1日22时57分,着上组合体GNC子系统控制7 500 N发动机点火,开始动力下降.初始时刻,着上组合体质量为3 735 kg,高度为18 km,速度约为1.6 km/s.动力下降过程约830s.主要结果如表1所示.

表1 嫦娥五号着上组合体动力下降结果
2020年12月3日23时10分,上升器开始起飞上升,飞行射向100.659 7°,目标入轨点为15 km×180 km轨道近月点(参考月面为1 737.4 km).主要结果如表2所示.
表2 嫦娥五号上升器起飞上升结果
2020年12月6日2时,轨返组合体与上升器相距约75 km处,轨返组合体和上升器分别采用轮控调姿方式转入对月定向姿态,轨道器GNC子系统相对导航建立,相距约50 km时,轨返组合体转入交会对接近程段,自主实施5次制导脉冲成功捕获5 km停泊点,并进行5 km位置保持控制;相继自主捕获1 km停泊点和100 m停泊点,并进行必要的位置保持控制;转入平移靠拢模式后,采用六自由度控制方式自主完成最后100 m的逼近;在满足对接抓捕条件后,向上升器GNC发出停控指令,向对接机构发出抓捕指令,完成交会对接任务.整个寻的、接近和平移靠拢过程中,相对测量敏感器稳定输出,制导控制过程中,控制器很好的抑制了燃料晃动影响.交会对接近程段持续时间约3.452 h,对接停控相对状态如表3所示,对接精度优于指标要求.
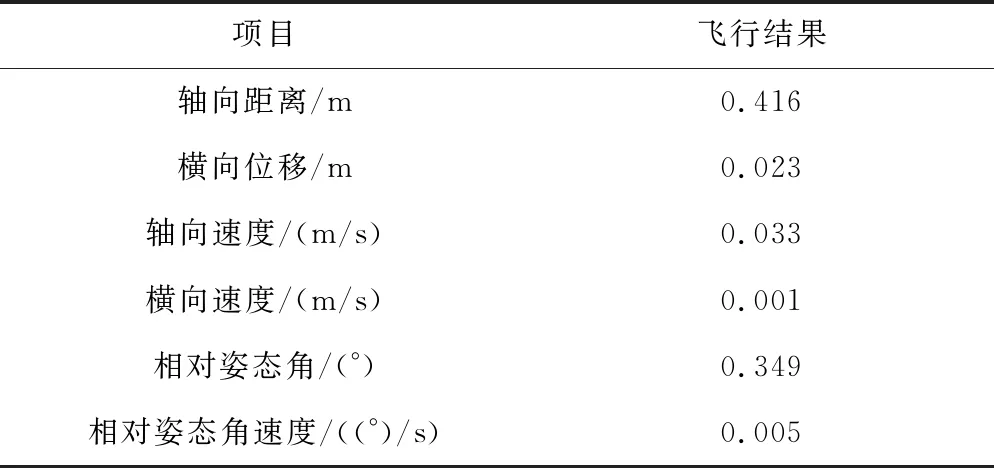
表3 嫦娥五号轨道器交会对接精度结果
2020年12月17日1时12分返回器与轨道器在地面高度5 008 km处分离,开始再入返回,初始速度10.654 km/s,再入角-5.718°.经过约1 060 s的二次再入飞行抵达高度10 km开伞点,返回再入航程6 522 km.GNC系统各设备以及制导、导航与控制回路表现正常,飞行结果如表4所示,开伞点精度优于指标要求.

表4 嫦娥五号返回器再入飞行结果
6 结 论
面对复杂的任务要求和严格的设计约束条件,设计了高自主、高可靠的嫦娥五号探测器GNC分系统,完成了月球表面起飞上升、月球轨道交会对接以及携带月壤以近第二宇宙速度二次再入返回的三项首次任务,飞行结果满足指标要求.