X射线天文卫星观测需求分析与控制总体设计
2021-11-10缪远明顾荃莹
潘 腾, 缪远明, 顾荃莹, 张 龙
北京空间飞行器总体设计部, 北京 100094
0 引 言
空间天文观测起源于空间X射线探测,直到现在,X射线探测依然是空间天文观测的前沿和热点[1].典型的X射线探测卫星包括:德国、美国、英国共同研制的伦琴X射线天文卫星(ROSAT)[2]、美国的钱德拉(Chandra)X射线天文台[3]、欧洲的牛顿多镜面X射线观测卫星(X-ray multi-mirror Newton,XMM-Newton)[4]、美国的核光谱天文台阵列(nuclear spectroscopic telescope array,NuSTAR)、日本的朱雀卫星(Suzaku)以及我国的硬X射线调制望远镜卫星(hard X-Ray modulation telescope,HXMT)等.
X射线天文观测卫星存在较多的观测需求与约束,一般包括全天球扫描观测、定点观测、小天区深度扫描观测、源定位与对准、多目标频繁切换观测和机遇目标快速切换等需求,以及轨道、热控、测控数传以及其他平台约束.世界已发射的26颗X射线探测卫星中,尚无将全天球扫描、定点观测、小天区深度扫描三种观测模式结合的案例.
本文对X射线天文卫星天文观测的需求进行了分析,提炼了观测任务的需求和约束,设计了集巡天观测、定点观测与小天区扫描观测于一体的观测模式,提出了在轨自主多目标切换控制策略,解决了一颗卫星同时实现全天扫描、银道面深度扫描、重要惯性区域扫描、重要及机遇目标定深度观测以及伽马暴全天监测的多种观测需求的难题.
1 X射线天文卫星观测任务需求分析
1.1 观测模式需求
X射线天文卫星的科学目标通常包括发现黑洞、中子星等高能未知天体、天文现象(统称源)等等,由于宇宙的各向同性,对于待发现的源没有预期方向,因此通常要求探测载荷可以均匀覆盖全天球,即全天球覆盖观测.
卫星在发现未知源后还需对源进行深度观测,根据需要观测的源的大小,又衍生出定点观测和小天区扫描观测两种模式.
当机遇目标出现时,卫星需快速切换至机遇目标,机遇目标观测完毕后恢复原观测目标.
钱德拉X射线天文台卫星和牛顿多镜面X射线观测卫星等卫星设计均包含了巡天观测和定点观测2种观测模式.
1.2 源的高精度定位与对准需求
要实现对X射线源的高精度定位,除与有效载荷自身的成像定位精度有关外,还需要卫星平台提供高精度的望远镜光轴指向测量.
望远镜光轴指向的测量精度取决于3个因素:(1)姿态敏感器定姿误差;(2)姿态敏感器与望远镜相对装配误差;(3)时间同步误差.
其中姿态敏感器与望远镜光轴之间的机械装配误差,主要由安装测量误差及结构变形引起,结构变形主要指卫星发射过程中振动、噪声等力学环境作用下机械应力释放引起的结构变形、由变化的太阳光照引起的结构热变形等.根据经验,这项误差量级较大,而且在轨期间为未知量,是限制载荷光轴指向确定精度的主要因素.为了消除这部分误差的影响,卫星在轨期间必须使用望远镜观测数据对二者之间的相对指向误差进行标定.
除了发现未知源,卫星也有对已知源进行观测的需求,例如进行探测器标定.由于观测对象可能是分布在天球各个方位的黑洞、中子星、活动星系核等高能天体,因此卫星必须具有三轴稳定惯性定向的能力,并具有任意惯性姿态的高精度指向控制能力.
1.3 轨道约束
卫星的轨道决定了卫星是否会周期性地进、出地球阴影,被地球遮挡观测目标等,从而影响卫星的观测策略、模式设计.此外,影响高度较高的范·艾伦辐射带及影响高度较低的南大西洋异常区也是轨道设计的重要考虑因素,要通过轨道高度和倾角的选择降低本底水平,满足望远镜灵敏度的要求.
钱德拉X射线天文台的轨道为9 942 km×140 000 km的椭圆,最远距离达到地月距离的三分之一,以避开地球辐射带的影响(在实际运行中每轨有85%的时间,约55 h位于地球辐射带之外).
1.4 热控约束
空间热环境对X射线天文卫星的影响主要有两方面.首先是低温探测器的温度直接影响探测的本地噪声,该类探测器对温度值、温度稳定性、温度均匀性均提出了严格的要求;其次是空间受热不均将导致载荷结构变形,从而影响载荷的指向、定位精度,从这个方面出发,观测任务希望卫星入轨后能够拥有稳定的受热环境.
1.5 测控与数传约束
卫星控制、运行状态监视、载荷探测数据的下传均要依赖卫星的测控数传功能,在开展测控数传功能设计时,需要重点考虑由于天文观测卫星观测姿态不固定、对地面不固定所带来的影响.除此之外,由于卫星没有固定对地面,观测姿态对采用GNSS系统进行定位、授时的卫星也会产生较大影响.
1.6 其他约束
除以上所列几点,观测任务对卫星在能源、数据存储、时统等方面也存在不同需求,本文不在此一一列举.
2 HXMT卫星控制总体设计
HXMT卫星是我国首颗自主研制的大型天文卫星,其任务设计与技术特点对后续天文观测任务规划有重要的借鉴意义[5].
2.1 卫星科学目标
HXMT卫星发射入轨后,在卫星测控系统、地面应用系统的支持下,通过对1~250 keV能区的X射线天文观测可以完成对众多天体目标和现象进行深入全面的科学研究[6].
HXMT任务的主要科学目标是:
目标1:通过巡天观测,发现大批被尘埃遮挡的超大质量黑洞和未知类型天体,研究宇宙硬X射线背景辐射的性质.
目标2:通过定点观测黑洞、中子星、活动星系核等高能天体,分析其光变和能谱性质,研究致密天体和黑洞强引力场中物质的动力学和高能辐射过程.
目标3:通过定点观测X射线脉冲星,探索利用X射线脉冲星实现航天器自主导航的技术和原理.
2.2 控制系统组成
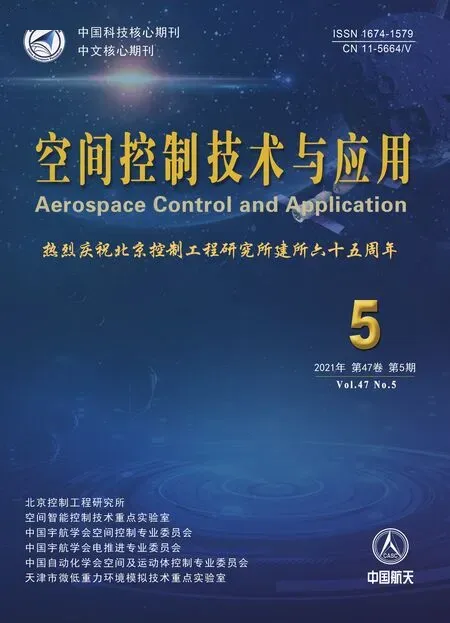
HXMT卫星控制系统,主要由以下部件组成:
敏感器:包括1台数字太阳敏感器、5台模拟太阳敏感器、3台0-1太阳敏感器、2台二浮陀螺组合件、1台光纤陀螺组件、3台中等精度星敏感器;
执行机构包括:6台动量轮、3台磁力矩器、帆板驱动装置;
控制器包括:控制计算机和应急控制器、姿轨控配电器.
分系统组成原理框图见图1.
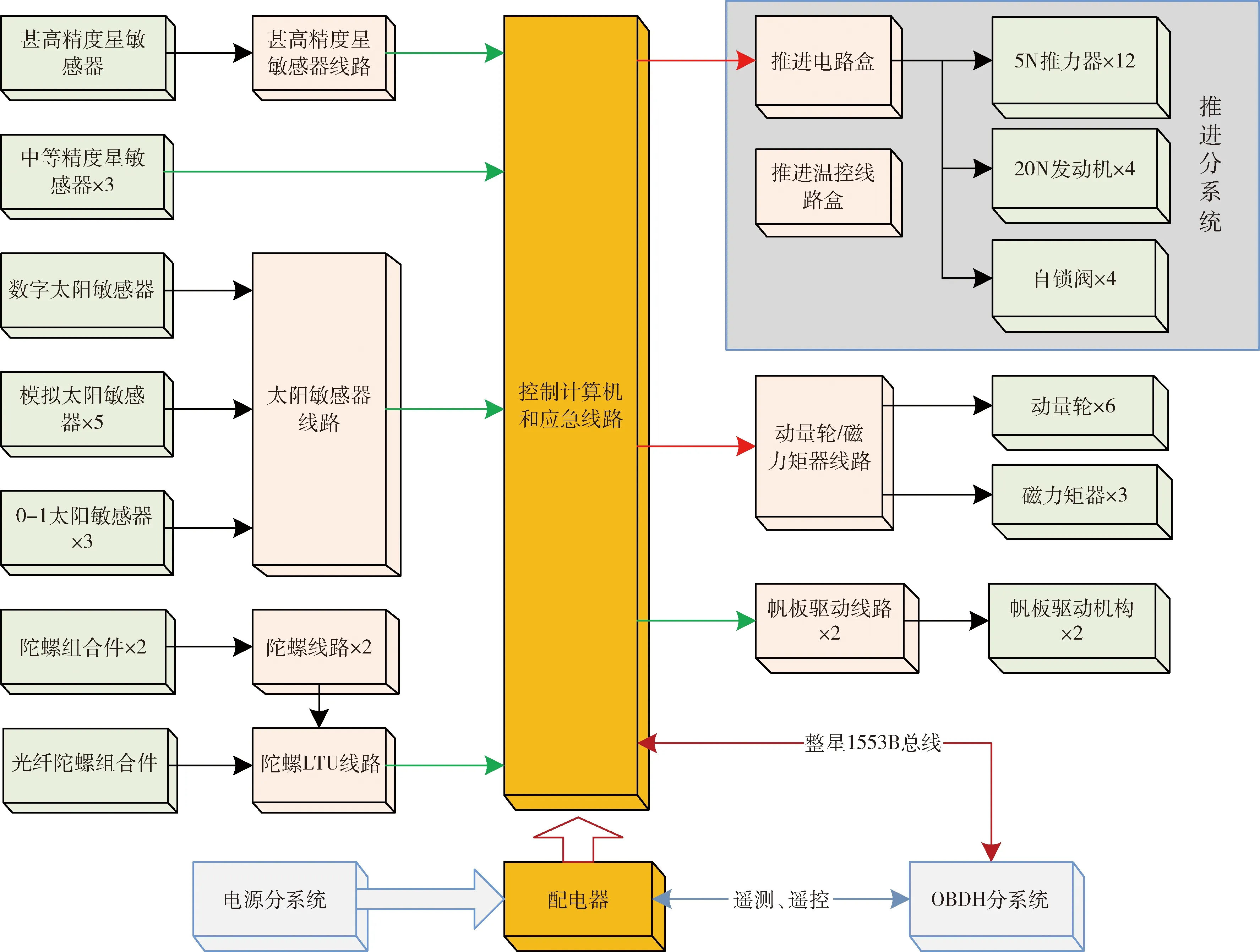
图1 控制分系统原理框图
2.3 控制模式设计
HXMT卫星工作模式分析与设计是整个任务分析的核心,它不仅决定了飞行任务能否顺利实现科学目标,而且决定了整个系统的复杂程度,进而直接影响到系统的研制与运营成本,因此工作模式设计需要进行广泛的权衡与折衷.
首先,各种工作模式的设计要确保完成各种科学观测,且各项技术指标均能满足任务要求;
第二,工作模式设计要兼顾星上能源要求,通过优化设计观测姿态使得太阳帆板获得较好的日照条件,简化能源设计;
第三,要兼顾星上热控系统的设计,倾斜轨道以及多种姿态定向模式带来的复杂外热流,加上载荷提出的低温要求(低能探测器巡天观测要求:-80℃~-42℃),使得热控系统设计异常复杂,因此通过优化设计观测姿态,尽量使星体具有固定的背阳面是工作模式设计必须要考虑的;
对于科学目标1和2,无论从观测目标、科学原理以及实现方式上都存在很大差异,科学目标1主要是实现全天球覆盖,工作模式的设计必须首先满足这一要求,而目标2主要是实现定点观测,为惯性空间定向,因此必须分别设计来实现各自的科学目标,分别为巡天观测模式和定点观测模式.
对于科学目标1中局部小天区的深度成像观测,主要是针对X射线源密集的局部天区通过增加观测时间来提高观测灵敏度,以发现更多的射线源.通过对天区范围及分布的分析发现,有的天区对卫星来讲仅仅是有限张角,而有的天区范围广阔已将卫星涵盖其中,如银心区域是一饼状的圆形区域.对于有限张角的天区,可以通过两轴的小角度姿态转动,进行网格式扫描来实现.而对于银心区这一广阔的饼状区域,可以通过对多个有限天区的分块扫描的办法实现.因此要实现小天区深度成像的科学目标可以统一通过小天区扫描观测模式实现.
对于科学目标3,主要是定点观测X射线双星和X射线脉冲星,与科学目标2相同,可以借助定点观测模式实现观测.
综上,HXMT观测任务需要设计巡天观测、定点观测和小天区扫描3种观测模式以满足观测任务的需求.此外,出于卫星入轨、在轨测试、观测目标切换、轨道维持、安全应急等需求,还设计了入轨模式、在轨状态建立模式、姿态机动模式、对日安全模式、停控模式、应急模式.各控制模式切换条件示意如图2所示.
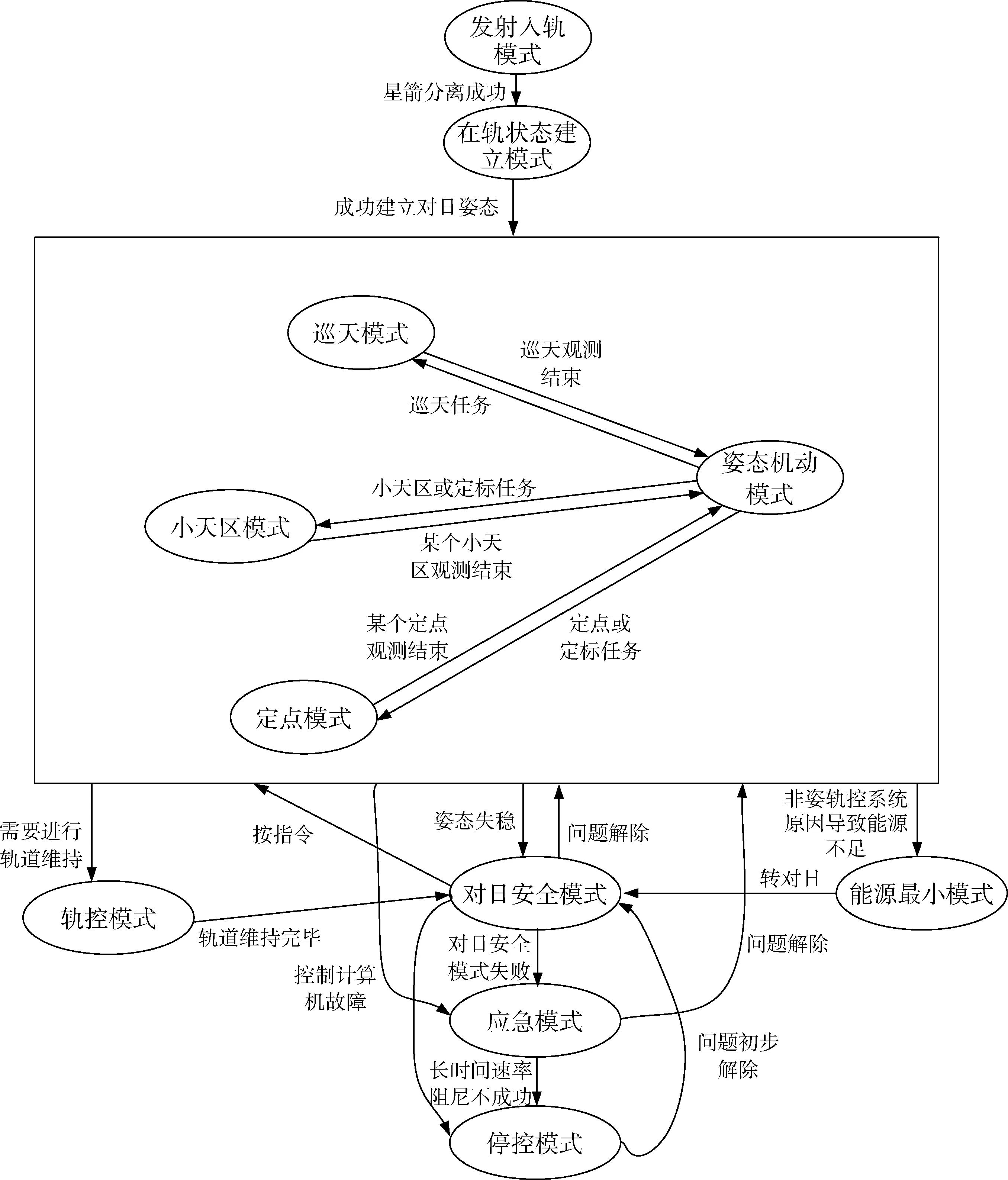
图2 HXMT卫星控制模式及切换条件示意图
2.4 主要技术指标
HXMT任务科学目标是将源的定位精度达到0.02°,为了达到此定位精度,要求望远镜的指向测量误差和对源的成像位置随机误差的综合要优于0.02°.
根据对探测器视场的需求分析,探测器单体视场为1°×5.7°,需要因望远镜指向变化而造成的源的探测计数率变化小于10%,因此在一次定点观测中需要有效载荷光轴指向误差控制在0.1°以内,即望远镜指向控制精度要求优于0.1°.
对于姿态稳定度这一指标,飞行任务并没有对有效载荷的姿态稳定度提出过高的要求,主要是从姿态采样频率以及数据内插对姿态确定精度造成的影响进行考虑.从优化总体设计的角度考虑,尽量降低对卫星平台的控制要求,任务提出一般卫星平台均可达到的0.005(°)/s的姿态稳定度要求,但为了保证卫星对惯性X射线源的定位精度,需要保证惯性姿态指向测量精度,减少姿态插值误差引起的光轴指向误差,因此需要卫星每0.5 s进行一次姿态采样,保证在两次采样之间望远镜的姿态变化不超过0.002 5°的测量精度.
对于采用姿态慢旋的工作模式,由于载荷光轴指向在慢速旋转,任务对沿自旋轨迹方向的指向精度并无特殊要求,而比较关心相邻轨迹重叠率的均匀性,要求偏差不超过0.25°,根据这两种工作模式的设计原理,可以将此偏差转化为对太阳的指向精度.此外,考虑到姿态角速度测量精度将直接影响到任意时刻姿态指向内插的精度,并兼顾目前陀螺的测量能力,对相对赤道地心惯性系的姿态角速度测量精度提出了0.001(°)/s的指标要求.
综上HXMT卫星观测模式与主要技术指标如图3所示.

图3 HXMT卫星观测模式与控制指标分析
2.5 在轨实施情况
1)巡天模式姿态控制
根据技术要求分解,巡天观测模式仅对指向精度提出指标要求.利用星上实时下传的星体三轴姿态角误差遥测数据,统计卫星指向精度,通过地面判读对卫星巡天模式下的指向控制精度进行评估[7].
巡天模式下姿态角和角速度误差数据如图4所示.
图4 巡天模式下三轴姿态角、角速度误差
三轴姿态角误差统计结果见表1所示.

表1 巡天模式三轴姿态指向精度评估
由统计结果可以看出,星体-Z轴对日指向精度为0.056°(3σ),远优于星体-Z轴对日指向≤0.25°(3σ)的精度要求.
2)定点模式姿态控制
利用星上实时下传星体三轴姿态角误差、三轴姿态角速度误差遥测数据,统计卫星指向精度和姿态稳定度,通过地面判读对卫星定点模式下的指向控制精度和姿态稳定度进行评估.
定点模式下姿态角和姿态角速度误差数据如图5所示.

图5 定点模式下三轴姿态角和角速度误差
三轴姿态角和角速度误差统计结果如表2和表3所示.
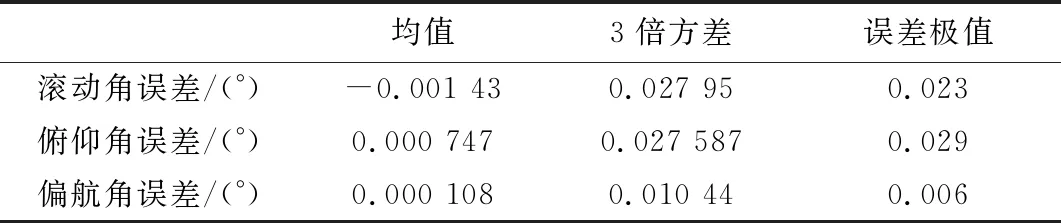
表2 定点模式三轴姿态控制精度评估
由统计结果可以看出,姿态控制误差绝对值最大为0.029°,远优于0.1°的控制精度要求;姿态角速度控制误差绝对值最大为0.001(°)/s,远优于0.005(°)/s(3σ)的姿态稳定度要求.
3)小天区扫描模式姿态控制
利用星上实时下传星体三轴姿态角误差遥测数据,统计卫星指向精度,通过地面判读对卫星小天区模式下的指向控制精度进行评估.
图6~7为小天区扫描的一个扫描段内三轴姿态角和姿态角速度误差变化情况、+X轴指向的赤经赤纬变化以及三轴惯性角速度变化情况.
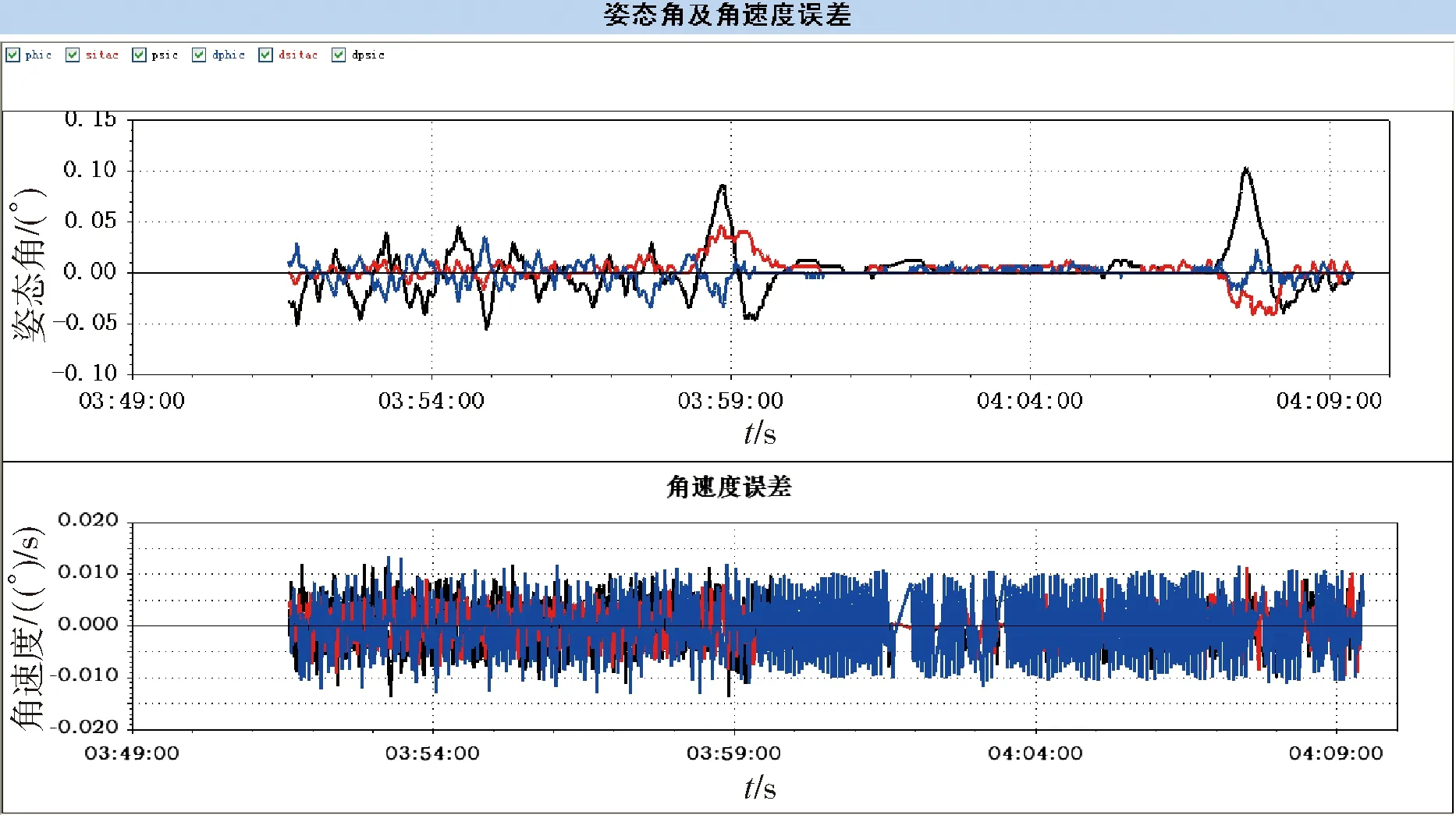
图6 小天区扫描模式下三轴姿态角和角速度误差
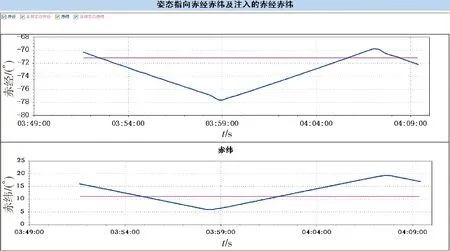
图7 小天区扫描过程中+X指向的赤经赤纬变化
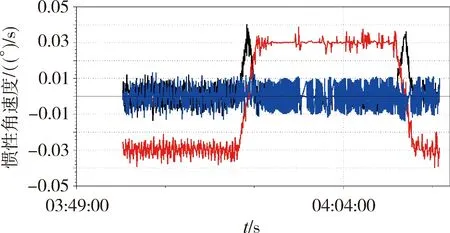
图8 小天区扫描模式下三轴惯性角速度
三轴姿态角误差统计结果如表4所示.

表4 小天区模式三轴姿态指向精度评估
由统计结果可以看出,姿态控制误差0.048°(3σ),远优于0.1°(3σ)的控制精度要求.
综上,各模式在轨实施结果表明,卫星实现了全天球扫描、任意目标定点观测和任意天区扫描观测的控制模式,相较任务指标,各项控制精度均满足要求,为完成科学探测目标提供了重要支撑.
3 结论与展望
针对X射线观测的多需求、多约束难点,设计了集巡天观测、定点观测与小天区扫描观测于一体的观测模式,解决了一颗卫星同时实现全天扫描、银道面深度扫描、重要惯性区域扫描、重要及机遇目标定深度观测以及伽马暴全天监测的多种观测需求的难题.
随着人类对天文研究逐渐深入,对天文观测任务中源的定位精度要求也越来越高,随之而来的是对控制系统更高的指向精度和稳定度.此外,利用观测载荷进行姿态确定,实现载荷、定姿一体化设计,消除因结构变形带来的姿态确定误差也是当下发展的趋势.在高自主、高动态方面,控制系统需要适应乃至主动规划卫星的观测任务,建立灵活的观测中断、恢复调度机制,在长期不间断观测模式下,进行姿态、轨道自适应调节,减少地面干预,实现更高效、更自主的科学探测.