未来行星表面漫游车自主导航技术研究
2021-11-10李志平陈建新
李志平, 顾 朋, 孙 帅, 陈建新
北京控制工程研究所, 北京 100094
0 引 言
行星表面探测是深空探测领域中一个重大分支.要想更好地了解一个外星球,最好的办法是能够着陆其表面,完成巡视勘探.目前开展行星表面漫游车研制的主要国家有美国、欧空局(ESA)和中国.对火星探测目前只有美国和中国的火星车成功在火面运行.美国的火星漫游车技术代表了当前最先进的行星表面漫游车研制技术.美国共研制了四代火星车:1996年发射的“索杰纳”是首个火星车[1],由于当时的技术水平限制,该火星车的任务主要是围绕探路者号着陆器附近工作,具备简单的自主避障能力;2004年发射的第二代火星车“勇气号”和“机遇号”在轨成功试验了基于视觉的自主导航与视觉测程功能[2-3];第三代火星车“好奇号”于2012年8月登陆火星,是第一辆采用了“核动力驱动”的火星车[4-5],在控制系统配置与方案上继承了“勇气号”、“机遇号”,但星载计算机的能力得到了很大的提升,计算机主频由原来的20 MHz提升为200 MHz,自主导航移动时平均移动速度可达2 cm/s.第四代火星车是2020年7月30日发射的“毅力号”火星车,其任务是探索直径45 km的杰泽罗陨石坑.“毅力号”火星车任务创新性地配备了一架小型直升机,在轨工作模式仍然是地面遥操作与星上自主导航相结合,但系统的自主导航能力有很大的提升,根据NASA官网报道,其自主导航(AutoNav)算法采用了高性能的Xilinx FPGA实现,可以实现120 m/h的自主导航移动.
中国在2013年、2018年分别成功完成了月球正面与背面的着陆与巡视探测,两台漫游车导航制导与控制系统技术状态一致,在轨工作模式以遥操作为主,在轨进行了自主导航移动的试验.截至2020年8月25日,“玉兔二号”已经在轨工作600天,累计行程519 m.2020年7月23日我国成功将首辆火星车“祝融号”发射升空,并于2021年5月15日成功着陆火星表面,随后进行为期90个火星日的巡视探测,其自主导航能力比“玉兔”月球车有了长足的提升,在113个火星日的寿命期内完成了超过1km的巡视移动,自主导航移动能力达到了56 m/h,且自主导航移动不再作为试验性项目,而是作为每日移动的常规操作.ESA计划在2020年7月份发射ExoMars,由于技术原因推迟到2022年进行,在轨操作方案也是采用地面遥操作与星上自主导航模式,期望日行进距离约100 m,从目前已有的文献来看,ExoMars的自主导航移动在40 m/h左右.
从上述运行的行星(月球)表面漫游车的情况来看,当前的月球车或火星车在轨巡视时,均是采用地面遥操作+自主导航的方式.深空探测任务通信时延和通信带宽的约束,使得地面遥操作控制方式将会变得越来越不适用.随着探测的深度与广度的延伸,后续的探测将会以采样返回为重点,最终的目标是要建立地外天体的无人或有人工作站.因此,为适应未来采样返回的探测需求,未来的行星表面漫游车要求具备高自主导航能力,实现更远的日行距离.如欧空局对未来火星车提出了日行进距离180 m的需求,因此未来漫游车必须是高效率且自主的.
针对目前漫游车自主导航存在的问题,各国均在进行相应的技术探索,期望能够满足未来漫游车的需求.美国JPL在立体视觉计算效率方面提出了采用FPGA实现快速计算的方案[14],且在“毅力号”上得到了应用;英国萨里大学研究者们对未来漫游车GNC提出了3种系统方案,引入轨道遥感影像数据,结合立体视觉、激光探测雷达(LiDAR)、站点匹配SLAM等技术,其目的都是为了一步提高自主导航的效率与成功率,解决长距离行驶与重复行驶路径的优化问题.
本文第一章针对现有漫游车自主导航的系统配置、自主导航方案、自主导航能力以及存在的问题进行了综述,第二章对未来漫游车自主导航需求、可能采用的系统结构进行了分析,第三章对未来漫游车的远景进行了规划,提出了智能化需求、自主导航等级的划分,用于指导我国未来行星表面漫游车的规划与设计,最后给出结论.
1 现有漫游车自主导航
1.1 导航系统配置
本节对美国、中国及欧洲的月球或火星表面漫游车的导航系统的相关配置进行了统计分析,具体情况如表1所示.
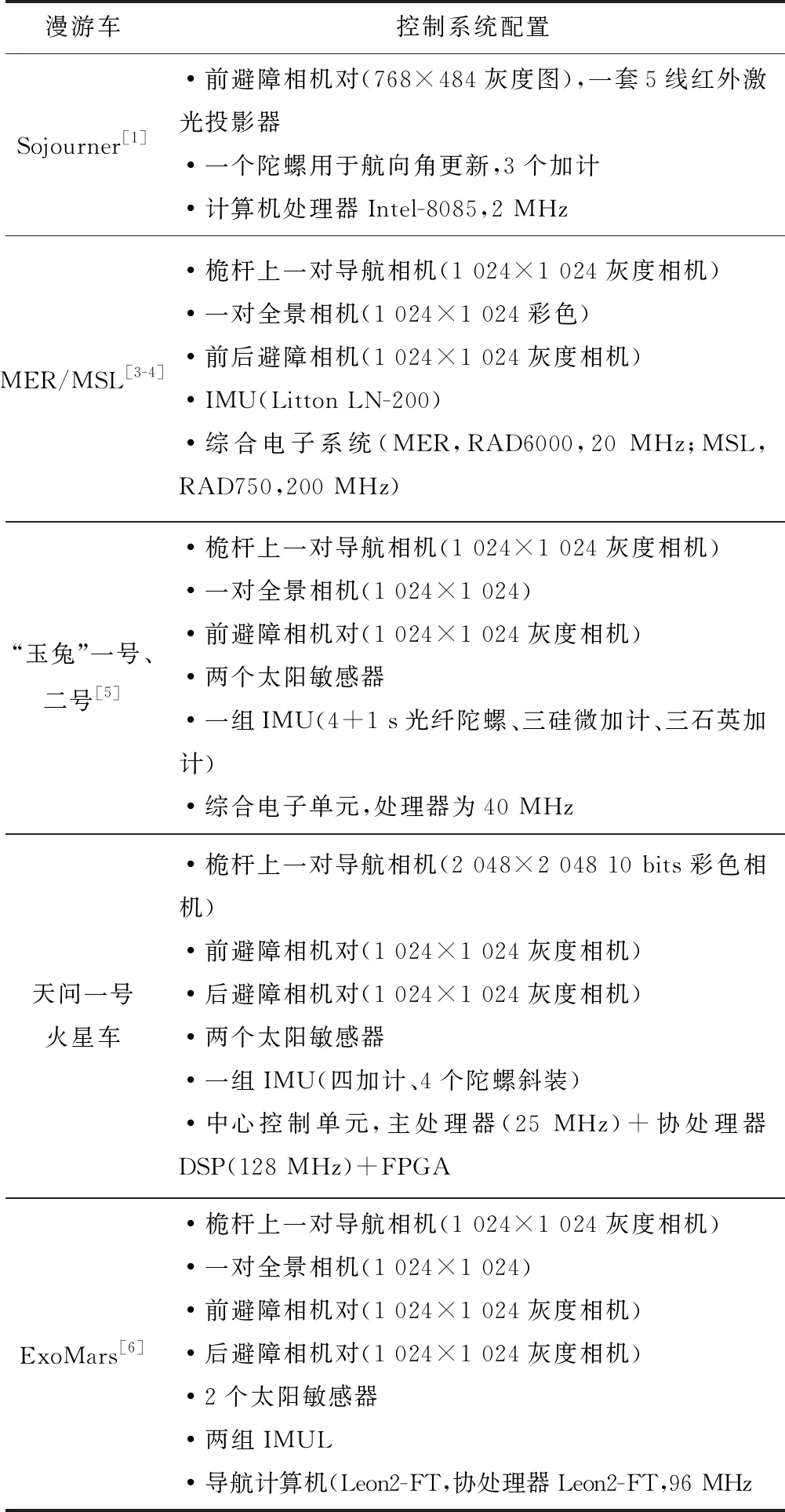
表1 现有漫游车GNC分系统配置统计
从表1可以看出,现有的美国火星漫游车、中国嫦娥三号、四号月球车以及天问一号、欧洲的ExoMars火星车的控制系统配置大同小异,因此在轨的导航使用方式与导航方案技术路线也基本一致.均是采用基于相机图像地面规划的遥操作方式和基于双目视觉障碍监测和路径规划的自主导航方式.
1.2 自主导航方案
在漫游车导航方面,立体视觉是一个非常具有吸引力的技术.首先因为它是被动光学成像,太阳能可提供所需要的能源,系统功耗小,且可获得足够多的环境信息.此外,通过增大相机的视场角还可获得更广范围的场景,无需机械扫描装置,这也降低了系统风险.因此,无一例外,MER/MSL,毅力号,ExoMars,玉兔一号、二号、祝融号火星车均是采用立体视觉完成自主导航.
从系统的配置来看,在轨自主导航配备的敏感器包括轮系里程计、IMU、太阳敏感器(MER采用导航相机完成对太阳矢量的敏感、ExoMars、中国的月球车、火星车均配备了单独的太阳敏感器),利用这些敏感器完成车体的定姿、定位功能(视觉测程完成精确的定位).在定姿定位的基础上,通过配备的相机完成行星表面未知环境的三维建模,用于对障碍物的探测与规避,最终完成自主导航.同时,导航相机与避障相机(仅视场角及安装位置不同)在某种程度上可以互为备份,都可以完成视觉测程与障碍规避.如MER勇气号采用前后避障相机来完成三维地形的建模,而机遇号由于着陆的区域地形相对复杂,要求获得更精确的三维地形来保证行车的安全,则采用像素分辨率更高的导航相机来完成.
1.2.1 MER的自主导航方案
MER任务在轨导航规划采用地面规划为主,星上自主规划为辅的方案,即地面在获取导航地形相机的基础上完成第二天的移动策略规划,在相机图像不能识别的区域,而且必须走的区域,则采用星上的自主导航方案[7-8].
表2是MER截止到2005年8月15日,勇气号与机遇号在轨各种移动模式的使用情况.其中自主导航移动的使用率在27%与21%左右[9].MER的自主导航方案如图1所示[10].首先地面指令给定目标点(WayPoint),选择自主导航模式,然后软件根据指令参数自主选择一对避障相机或导航相机完成图像采集,进行立体视觉匹配,建立环境的三维模型,按照DEM信息完成导航区域的适宜度图计算,完成路径的规划与选择,最后执行路径规划结果,按照移动步长控制漫游车移动,直至达到目标点.
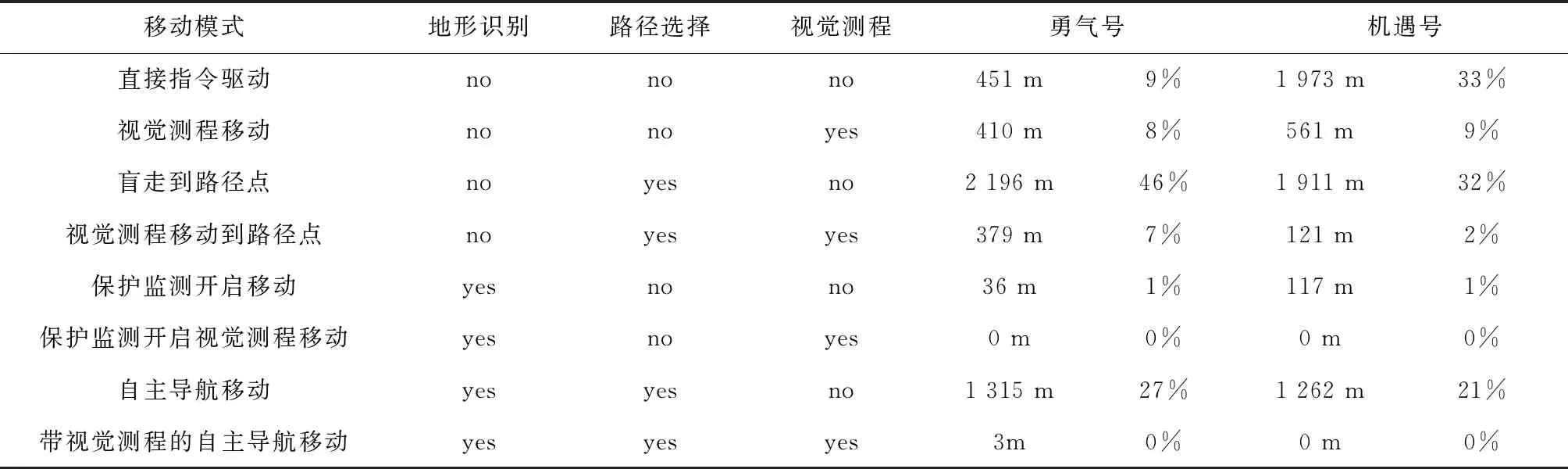
表2 勇气号(573 Sols)与机遇号(555 Sols)移动模式的使用情况(截止到2005年8月15日)

图1 MER自主导航(AutoNav)实施流程图
采用视觉导航的重点在于立体视觉图像的处理及路径的规划.MER的立体视觉处理流程如图2[11]所示.首先对左右相机图像根据地面的相机标定参数,完成相机模型的校正(如鱼眼校正、径向畸变、切向畸变校正等),然后完成图像的金字塔抽取,将原图的1 024×1 024分辨率降为256×256分辨率,减少计算量.不同比例的压缩方式会影响最终的三维恢复精度,文献[7]对相关的特性进行了对比性研究.完成图像压缩后,再进行DOG滤波,然后进入到立体视觉相关性计算,对输出结果滤波后进行输出立体视差信息,最终根据视差信息输出地形的DEM图,之后完成路径规划.
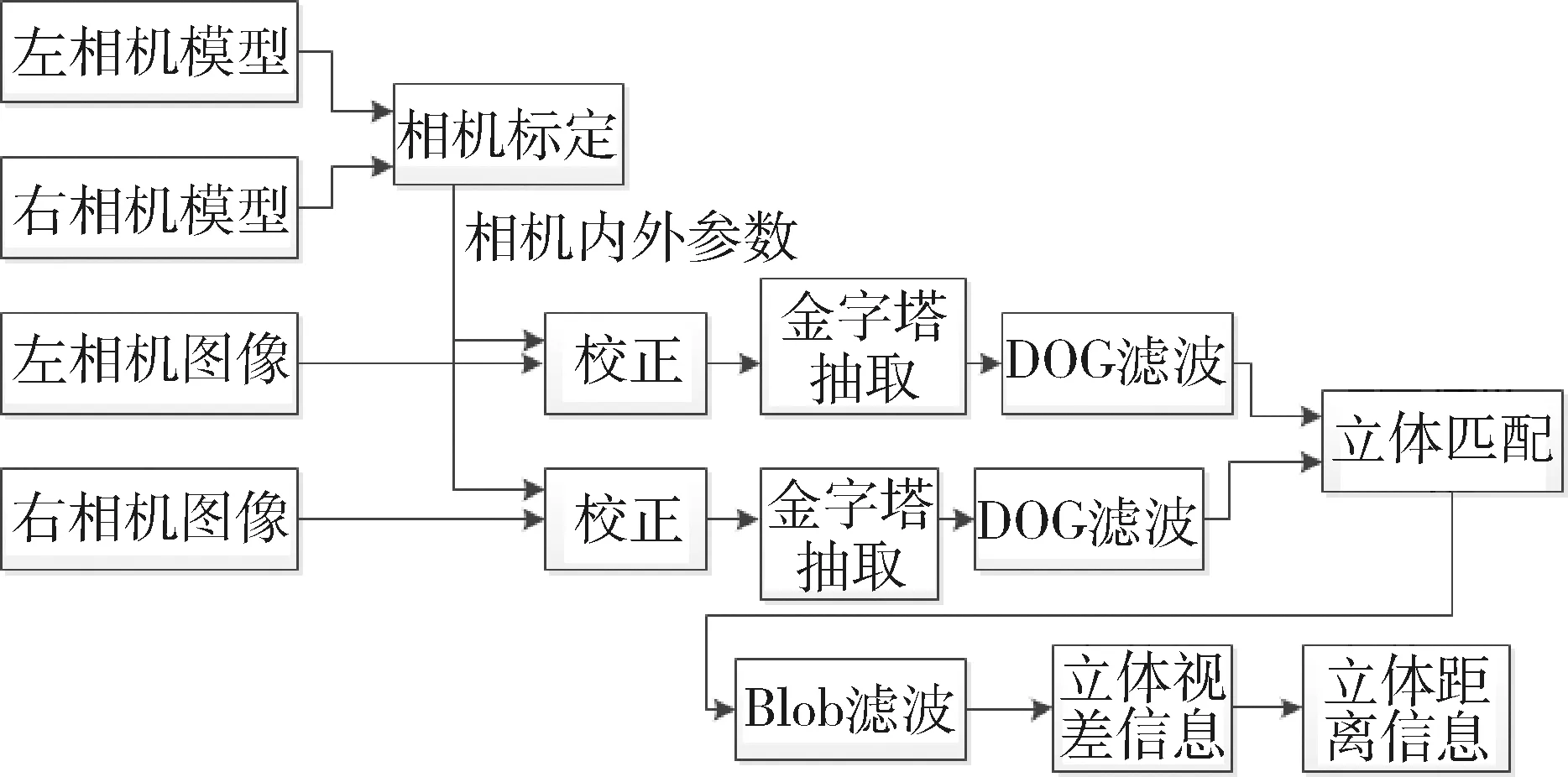
图2 MER自主导航立体视觉匹配流程
MER漫游车路径规划采用基于网格化的GESTALT(grid-based estimation of surface traversability applied to local terrain)算法.GESTALT输入条件为当前漫游车的位置、姿态估计值以及最新的距离信息(由立体视觉处理得到),原理是采用视差图生成DEM数据,通过建立网格化地形数据,以“适宜度图(goodness map)”的形式来表征地形的可通过性,然后进行路径的选择.路径选择一般考虑几个因素:计算曲率路径的适宜度值,引导点的加权值,最后通过加权计算融合两种评价值,决定选择的路径.基于GESTALT算法的路径规划示意图如图3所示,具体立体视觉处理与导航算法流程参见文献[12].
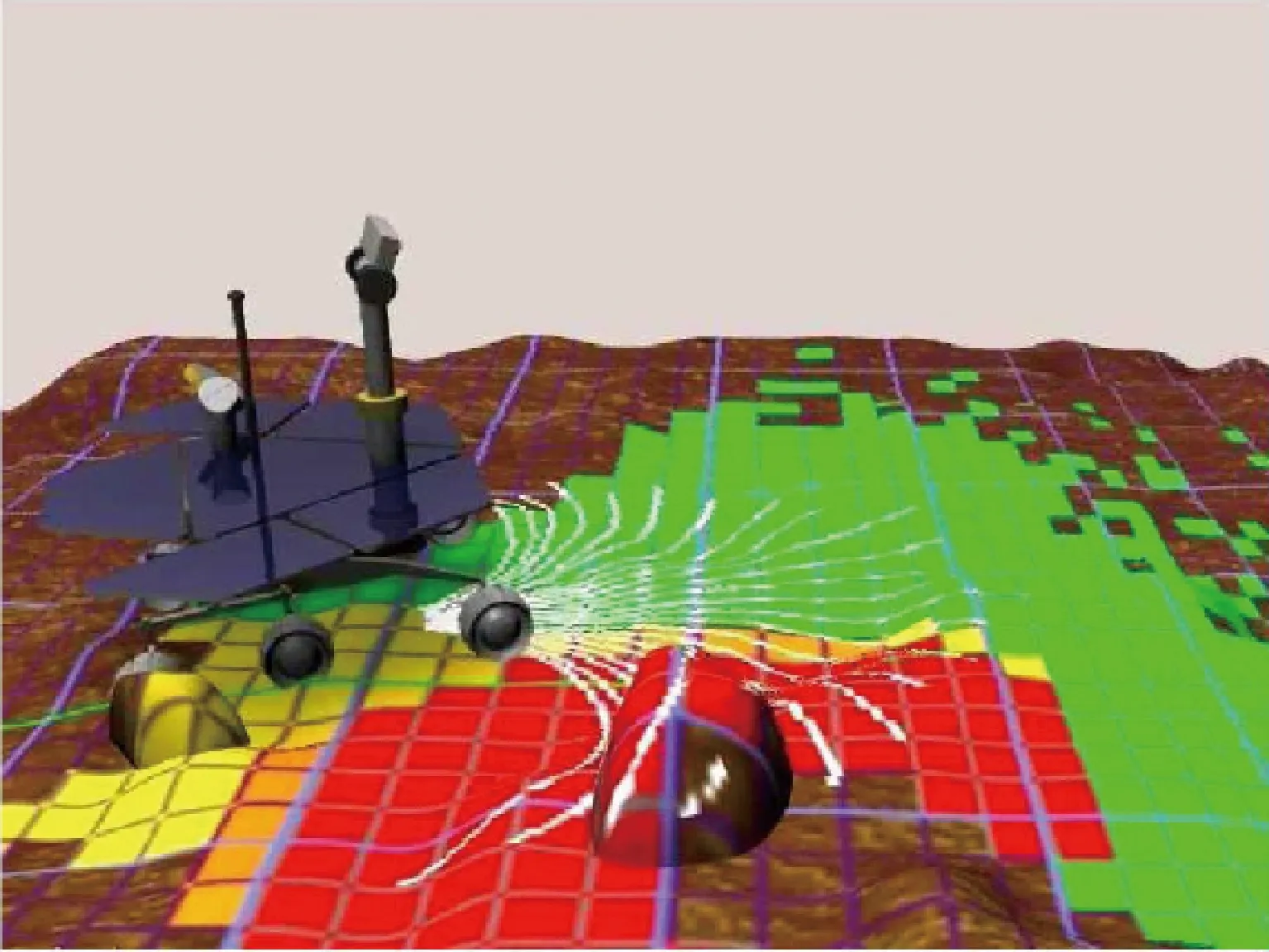
图3 基于GESTALT算法的路径规划示意图
GESTALT算法是一种局部的路径规划算法,通过在轨的表现来看,GESTALT在狭窄且孤立的障碍情况下工作的很好,但在障碍物分布簇拥密集的情况下很容易出现无安全路径的情况,因此JPL在2005年提出了一种“全局”路径规划的D*算法,并在2006年通过在轨软件更新进行了验证[13].
1.2.2 ExoMars自主导航方案
ExoMars由于技术原因推迟到2022年发射,但从目前已有的文献可以看到ExorMars的GNC自主导航方案,从平均移动能力指标上要高于MER.总的思路也是通过立体视觉完成自主导航[6].
ExoMars的视觉导航总体算法也是依据立体视觉匹配信息,与MER勇气号不同的是,ExoMars采用导航相机完成障碍检测与路径规划,在规划算法上采用了基于动力学的A*方法,而不是基于GESTALT的适宜度图方法,一次导航规划的范围在2 m左右.用定位相机(LocCam)实时完成视觉测程,位置更新率可达到0.2 Hz~0.1 Hz,并引入到运动闭环控制中.导航规划的主要步骤如下:
1)通过立体视觉获得地形的DEM信息;
2)依据获得的DEM信息,将地形划分为“可导航(navigable)”、“禁行(forbidden)”、“不可规划(non-plannable)”以及“未知(unknown)”四种区域;
3)然后根据输出的导航地图进行路径规划.路径规划采用了基于动力学的A*算法,较传统的A*算法考虑了漫游车的运动学特性.
具体的导航方法参见文献[6].
1.2.3 “祝融号”火星车自主导航方案
我国祝融号火星车的导航方案采用导航相机图像由地面完成全局路径规划,使用避障相机图像在轨自主完成三维地形恢复与自主路径规划.自主导航方案与MER无太大的差别,只是在效率、规划路径、使用方式上有所区别.
在探测效率上,祝融号火星车比嫦娥三号和四号有了很大的进步.得益于GNC分系统的硬件配置升级及视觉导航算法的优化,自主导航移动的速度可以达到56 m/h左右.我国火星车也具备视觉测程模式,利用导航相机图像完成,从图像处理到位置的输出需要30 s左右.
祝融号火星车自主导航中图像预处理与环境感知算法原理与MER一致,但在算法与并行计算方面进行了相应的优化.在路径规划方面,由于火星车移动系统采用六轮独立的驱动与转向设计,因此除可以进行曲率、原地转弯规划外,较MER漫游车增加了蟹行路径规划.更多的路径规划输出,可以提高达到目标的成功率.
图4是火星车基于适宜度图的路径规划示意图,其中颜色为绿色的是可通过区域(适宜度大),红色为不可通过区域(适宜度小).路径规划输出的优先级定义为曲率-原地转弯-蟹行.路径规划的方法是:事先给定一定数量的曲率路径和蟹行路径,通过计算每条路径的适度度评价值,该值由路径经过的每格的适宜度、与目标点的接近度来进行投票计算.如果该值达到规定的某个阈值,则选择其中该值最大的一条作为输出路径,如果没有对应的输出路径,则进行一次原地转弯,如果原地转弯次数达到规定次数还是无相应的路径,则计算蟹行路径,直至最终找到合适的路径,或者输出无安全路径退出.

图4 基于适宜度图的路径规划示意图
1.3 自主导航能力
对目前在轨运行的火星车、月球车以及即将在轨运行的ExoMars火星车(技术状态已经固化)的自主导航能力,从定位精度、自主导航平均移动速度几个指标进行对比分析,如表3所示(Sojourner由于当时的计算机技术限制,不将其列入到对比行列).

表3 当前漫游车自主导航能力对比分析
注:自主导航移动平均速度、视觉测程时平均速度,与视觉导航图像处理时间(算法的效率及计算机处理能力),车体移动过程车体速度及移动的步长都有关系.平均移动速度的计算公式为:步长/(视觉导航时间+步长/盲走最大速度).MER的盲走最大速度为124 m/h,祝融号和玉兔的盲走最大速度均为200 m/h,ExoMars盲走速度为100 m/h.
从表3中可以得出如下结论:
1)目前在轨运行的火星车或即将运行的火星车,在导航方式方面,均是采用地面导航规划为主,自主导航为辅的方式来完成探测任务.
2)为解决大坡面地形轮系滑移带来的轮系里程计测量误差,除嫦娥三号四号月球车外,其他火星车均采用了视觉测程技术,这样选择的原因是为火星表面的地形环境较月球表面要复杂的多,通过视觉测程方法可以获得精度较高的定位精度.视觉定位精度均在2%R级别,相差不大.
3)自主导航移动平均速度方面,由于地外天体表面崎岖,自主导航过程运算量较大,航天处理器能力受限等因素,目前漫游车自主移动速度均较低,我国后续漫游车在自主导航算法优化与系统设计上还有很大的提升空间.
对比结果表明,目前的行星表面漫游车自主导航均是“一步一停”的方式,为进一步提升自主导航的水平,工程师及学者们均在对图像处理算法的处理方式进行不懈的努力,如文献[14]研究了采用FPGA完成立体视觉处理,期望能够做到连续自主导航.据已有的报道,毅力号已经进行了尝试.
1.4 目前全自主导航设计存在的技术难点
所谓全自主导航控制,就是不再依赖地面遥操作,在行星表面的导航移动全部由器上自主实现.全自主导航控制是未来深空行星表面探测器必然发展方向.诚然,当前的技术水平又不得不长时间采用星上半自主加地面遥操作的方式来实现行星表面漫游车的驾驶控制.主要的技术难点如下:
1)由于视觉图像处理算法的复杂性与航天器件性能的约束使之处理效率低,导致两个问题:一是自主大范围感知的能力弱,安全性低;二是自主局部地形重建耗时太长,达不到边走边规划的目的,严重影响漫游车的移动效率.
2)漫游车对环境的自主感知能力有待提高,包括对环境障碍的识别能力,对障碍的精细识别能力等,需进一步提高准确性,减少设计安全裕度,实现保证安全性同时提高效率的目的.
3)漫游车路径规划与决策能方面:未来漫游车需要有更远距离的自主最优路径(考虑能源、安全等)规划能力,构建大范围三维地图以及根据当前的能源、通信条件完成大范围(大于10 m)的路径规划的能力.
4)深空探测能源的严苛约束,使得地面一些先进传感器不能简单地应用于深空探测领域.
2 未来漫游车自主导航技术探讨
2.1 未来漫游车的自主导航需求分析
未来行星表面漫游车必定是高自主、高效的.亟需解决的问题是:如何实现自主连续导航,提高在轨移动探测效率,提高漫游车日行进距离.期望满足如下的几个要求:
1)具备全自主导航能力,能够根据地面指令“指哪走哪”.
2)日行进距离要求大于200 m/Sol
3)单次自主导航移动速度大于100 m/h.
4)自主定位精度小于1%R.
在未来探测任务中,比如后续月球表面探测、火星巡视采样返回探测等,要求的日行驶距离要远远超过当前的所有在轨运行的漫游车.欧空局的未来行星表面漫游车的平均移动速度要求达到180 m/Sol,也是出于对未来采样返回火星车的任务需求.
为完成上述性能指标要求,需要从系统体系结构(包括新型敏感器、高性能图像处理模块)、自主导航算法等方面进行研究.
1)研发新型环境感知敏感器替代目前的被动光学成像敏感器,提高获取三维有用信息的速度,减少计算负担,如配备深度相机(TOF相机)、LiDAR等传感器.
2)研究更高效,更适合于硬件实现的感知与视觉测程算法,如FPGA完成视觉图像处理算法,加强多传感器信息的融合,提高算法的效率与鲁棒性,实现“边走边决策”的能力,同时满足定位精度要求.
2.2 几种可能的系统结构
对于未来漫游车的高效率、高自主性探测,其系统体系结构设计瓶颈在于高性能的计算平台与新型的环境感知敏感器.本文提出我国未来漫游车几种可能的系统结构,重点针对目前的视觉导航系统,就如何进一步提升自主导航效率,实现连续自主导航方面进行对比分析.本文仅从感知敏感器配置方案进行讨论,考虑了激光三维相机与光学相机方案.
2.2.1 光学相机+视觉算法硬化方案
该方案在系统配置上与当前巡视器无太大的区别,但在光学相机上加强了计算能力的设计,除能直接输出原始图像数据外,还具备立体视觉处理的能力,直接可输出地形三维信息(视差图),系统能够连续进行自主导航与视觉测程.具体系统结构如图5所示.

图5 光学相机导航方案
本方案中局部感知敏感器为大视场角(大于120°)的相机,采用双目立体视觉一体化设计方式,可直接输出视差图,输出帧频大于30 Hz.全局感知敏感器采用相对窄视场(视场角在46°以内)相机,保证远距离(10 m左右)的三维恢复精度小于15 mm,能够输出图像数据与视差图,在视觉测程过程中,导航模块负责完成视觉测程,动态实时更新修正漫游车的三轴位置与姿态.
视觉敏感器利用FPGA完成双目立体视觉的图像处理,直接输出导航模块使用的相关信息(视差图、特征点等),降低导航模块处理器的计算负担,保证局部自主规划避障与视觉测程能够在车体运动过程中完成,实现连续自主导航.
本方案视觉导航敏感器全部采用被动光学相机,系统的体积功耗可得到有效的控制,系统的信息流类型简单,但由于采用窄视场的导航相机作为全局规划,需要桅杆转动不同角度通过信息拼接的方式以获取更大视场范围的图像,桅杆的运动与控制相对耗时较大,因此无法做到车体在运动过程中完成全局路径规划.此外,被动光学相机受外部光照环境影响较大,在太阳高度角较低(如极区探测)、阴影区探测时有可能无法获取有效的地形特征参数.
2.2.2 激光三维相机方案
该方案中将全局感知敏感器换成激光雷达(需大于10 m以上的远距离探测)与局部感知敏感器替换成TOF相机来完成全局路与局部的路径规划对外部环境的感知,方案如图6所示.
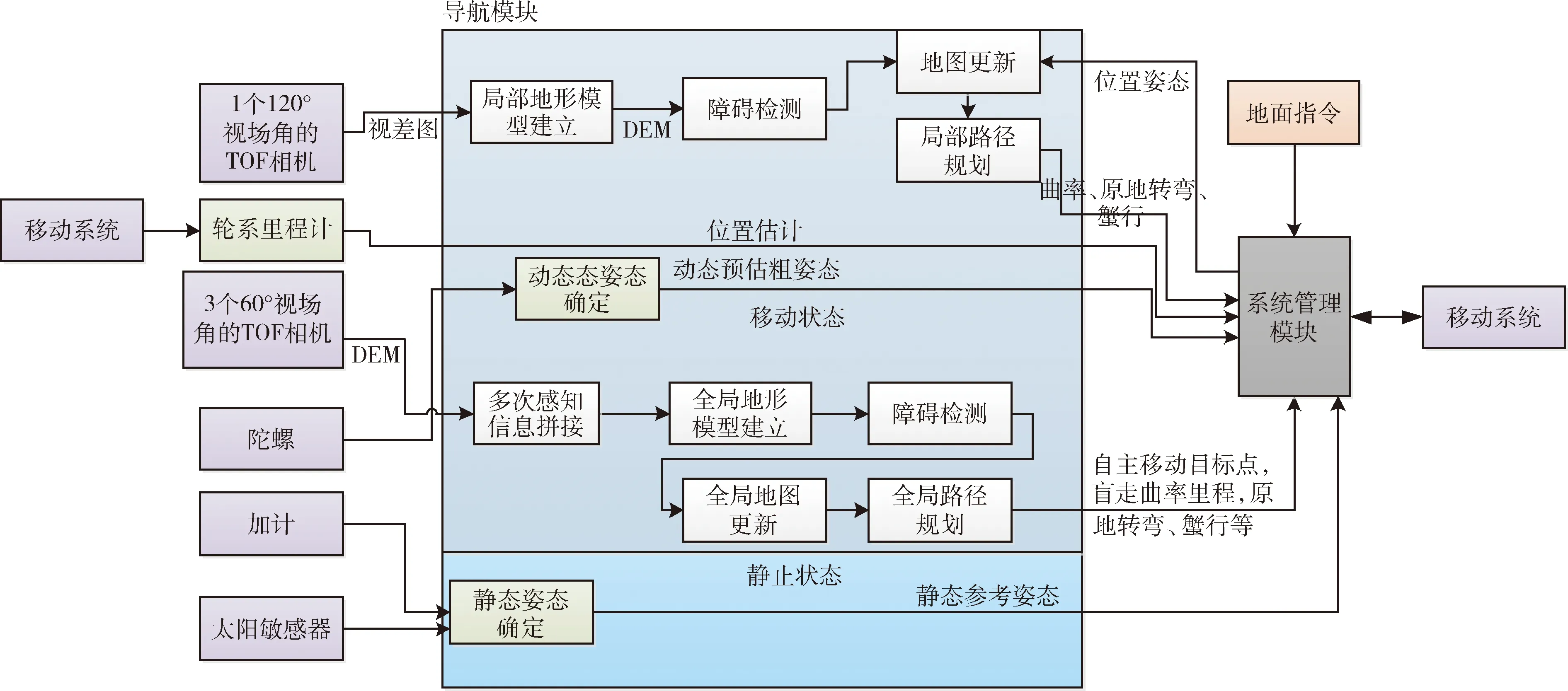
图6 激光三维相机导航方案
系统配置时在桅杆上配备2个或2个以上的MEMS激光雷达,可同时获取不同视场方向的地形三维信息,期望在车体移动过程中完成全局的路径规划.比如三个视场角60°的MEMS雷达,通过拼接在不转动桅杆的条件下可一次性获得前方180°范围内的地形三维信息,如图7所示.车体下方可配备1到2个大视场的TOF相机(视场角120°),获取前方近距离范围内地形的三维信息.

图7 激光雷达导航简图
采用3个MEMS雷达来完成车体前方大范围地形的三维信息,可以实现车体运动过程中的全局路径规划.激光三维与TOF相机能直接输出地形的三维点云信息,但是按照目前的技术水平,同等探测距离条件下,这种采用主动光源成像的产品,功耗要远大于普通的光学成像敏感器.相较于光学成像敏感器,激光三维与TOF相机的优点是对外部光照环境不敏感,可探测低照度或永久黑暗区环境.缺点是功耗相对较大,且无视觉图像,无成熟的激光三维视觉测程算法来实现高精度的位置姿态估计.
2.2.3 激光三维相机+光学相机方案
第三种方案就是综合激光三维相机与光学相机的优点,在使用过程中规避各自的缺点,对系统配备两种类型的视觉敏感器.正常光照条件下,采用光学相机方案,而在特殊环境条件下,则使用激光三维相机方案.代价是在原有的光学相机方案中增加了激光三维相机的重量、功耗与体积资源,对整器的布局需要精心设计,同时星载计算机要具备能够处理这两类相机的数据能力,对计算机的处理性能有一定的要求.
3 未来漫游车的远景展望
3.1 智能化需求
在解决漫游车的连续自主导航问题之后,未来的漫游车应该是是智能的.漫游车可以根据自身携带的敏感器及载荷,不但可以完成自主的行走,还可根据所感知的信息,完成科学探测点的自主选择,实现能源与通信的自主管理,完成探测任务的自主规划并具备一定的自学习能力.
未来的漫游车,地面系统将会很少介入,只需要给定探测任务目标,等待探测结果即可.因此,未来智能漫游车将具备如下的能力:
1)具备全自主驾驶能力.
2)具备对外部未知环境实时自主感知能力.
3)具备对环境的学习分类能力、自主决策或为地面操作人员给出规划建议.
4)具备网络化,群智能能力,能够实现多智能探测器协同工作.
5)能够实现能源与通信的自主管理,自主分析载荷探测数据,自主完成科学探测点的选择.
3.2 漫游车自主控制等级划分初探
2016年9月,美国交通运输部明确了无人驾驶汽车以美国汽车工程师协会SAE(society of automotive engineers)的发布的6级标准定义具体如表4所示.
从表4的等级分类标准可以看出,自主驾驶等级的定义主要取决与两个因素:人的参与程度以及对环境的约束程度.借鉴汽车自动驾驶等级划分,行星表面漫游车在自主控制方面,可以作如下的定义划分:

表4 美国汽车工程师协会汽车自主驾驶等级定义
在初级阶段根据天地链路图像数据与遥测信息制定移动策略,由地面指令指定运动控制策略,完成移动探测器的运动(完全遥操作).
在初步自主移动阶段,可通过探测器自带的相关传感器(定姿定位传感器、环境感知传感器等)完成行星表面的环境自主感知,自主完成到目标点的移动(部分遥操作).更高层次的自主移动阶段,可根据移动探测器的平台信息,包括能源管理、通信管理完成自主任务的规划,自主制定运动控制策略(智能化).可将行星表面移动探测的自主驾驶的4级(L0~L3)等级定义如表5所示.
未来漫游车可根据表5的自主控制能力的定义,确定不同级别敏感器、控制计算机的最低配置需求,确定自主控制系统的体系结构及软件功能,形成相应的标准规范,指导我国后续深空探测行星表面漫游车自主导航的规划与设计.

表5 行星表面移动探测器自主驾驶等级定义初步设想
4 结 论
本文对目前行星表面漫游车的自主导航方案与能力进行了对比分析,提出了目前采用全自主导航设计存在的约束条件,给出了未来漫游车自主导航研究的方向,并对我国未来基于地形三维恢复的自主导航方案进行了讨论,给出了未来漫游车的远景规划,对我国未来漫游车的自主导航技术的发展方向提出了建议.